下肢智能反馈训练系统详解演示文稿
- 格式:ppt
- 大小:6.66 MB
- 文档页数:25
2019·7(下)《科技传播》142作者简介:张皓洋,南京外国语学校。
基于Arduino的下肢康复训练系统张皓洋摘 要 本研究开发了一种基于模拟直立行走的下肢康复训练控制系统,该系统包括下肢康复训练机构设计、电机控制电路及控制软件等。
下肢康复训练系统采用3个步进电机为训练设备的下肢运动机构提供动力,选用Arduino 板为控制核心,使用WPF 设计上位机用户端,实现了下肢的同步训练和交替训练。
本实验结果表明,该控制系统具有良好的稳定性,满足了下肢康复训练的需求。
关键词 下肢康复;控制系统;Arduino ;WPF中图分类号 TP273 文献标识码 A 文章编号 1674-6708(2019)239-0142-03随着现在社会的不断发展进步和人们生活水平的提高,人口老龄化的问题日趋严峻,由脑卒死等导致的神经损伤引发下肢功能出现障碍,或由于车祸、工伤等下肢意外受伤的患者,其下肢康复是个漫长的过程。
而传统的康复治疗手段大多采用医生手工辅助完成,大大增加了康复过程的成本且效率低下,也会影响患者的身心健康。
目前市面上的下肢康复训练装置功能不全,大多只能模拟下肢的两个自由度运动[1]。
本次设计的下肢康复装置具有3个方向的自由度,更贴近于人体正常行走时的状态。
该系统克服了现有下肢康复训练设备的缺点,既可以实现双腿的张合训练,也实现了双腿各自张合和旋转运动的独立性[2]。
1 功能及性能指标本文研发的下肢康复训练系统主要功能如下:在训练时,患者将脚部放置在脚踏板上,本系统设置三个步进电机,两个对称放置的电机分别控制双腿的旋转,另外一个电机用于控制双腿的分合,实现三个自由度的运动训练。
根据使用者的训练要求,可在上位机界面上操纵装置的运动,满足了不同患者的运动习惯,同时也设置了不同的康复训练游戏模式,提高了患者的恢复速度。
具体实现功能如下:1)运动训练由三个电机提供动力,彼此之间实现独立驱动。
训练模式包括上下前后拟合成的旋转运动和左右直线的运动。

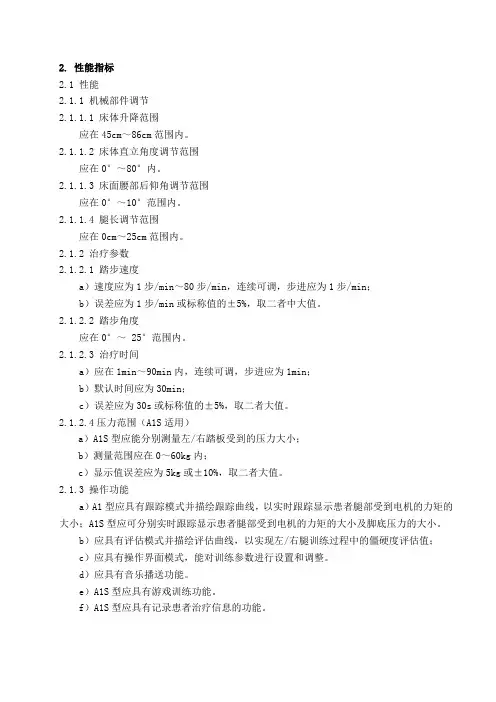
2.性能指标2.1性能2.1.1机械部件调节2.1.1.1床体升降范围应在45cm~86cm范围内。
2.1.1.2床体直立角度调节范围应在0°~80°内。
2.1.1.3床面腰部后仰角调节范围应在0°~10°范围内。
2.1.1.4腿长调节范围应在0cm~25cm范围内。
2.1.2治疗参数2.1.2.1踏步速度a)速度应为1步/min~80步/min,连续可调,步进应为1步/min;b)误差应为1步/min或标称值的±5%,取二者中大值。
2.1.2.2踏步角度应在0°~25°范围内。
2.1.2.3治疗时间a)应在1min~90min内,连续可调,步进应为1min;b)默认时间应为30min;c)误差应为30s或标称值的±5%,取二者大值。
2.1.2.4压力范围(A1S适用)a)A1S型应能分别测量左/右踏板受到的压力大小;b)测量范围应在0~60kg内;c)显示值误差应为5kg或±10%,取二者大值。
2.1.3操作功能a)A1型应具有跟踪模式并描绘跟踪曲线,以实时跟踪显示患者腿部受到电机的力矩的大小;A1S型应可分别实时跟踪显示患者腿部受到电机的力矩的大小及脚底压力的大小。
b)应具有评估模式并描绘评估曲线,以实现左/右腿训练过程中的僵硬度评估值;c)应具有操作界面模式,能对训练参数进行设置和调整。
d)应具有音乐播送功能。
e)A1S型应具有游戏训练功能。
f)A1S型应具有记录患者治疗信息的功能。
2.1.4承载能力2.1.4.1设备应能承载135kg分布的质量,其形变的量不应大于5mm。
2.1.4.2设备在承载135kg分布的质量的情况下:a)作上、下运动、角度调节呈中间任一位置时,自行下降量不得超过10mm/h,角度变化量不得超过2°/h;b)设备应能从最低位置起上升。
从最小角度调至大值,进行上升或调整、停止,不应有停顿和突跳现象。

智能下肢外骨骼康复系统作者:李叶来源:《设计》2021年第22期看点大脑重建原理个性化主动辅助仿生、轻量、易穿戴、易转运脑卒中患者及时有效康复介入可以极大提高康复效果,降低致残率。
丞辉威世下肢外骨骼机器人覆盖康复全周期,首创脑卒中偏瘫从卧位到步态训练及步态评估的完整智能化解决方案,帮助更多患者恢复行走。
丞辉威世智能下肢外骨骼康复系统根据大脑重建原理,将任务导向练习和智能康复机器人训练结合,帮助患者协同完成有控制性的运动功能训练(卧位训练、坐站训练、平衡训练及步态训练),通过重复的强化训练,从而促进大脑中枢神经系统的功能重建。
基于人工智能技术实现意图侦测,基于机器学习实现个性化主动辅助;适用多种康复场景,云端数据平台加持,使康复辅助更智能科学;产品仿生、轻量、易穿戴、易转运。
针对于脑卒中等导致下肢运动功能障碍的患者进行坐站转移、站位平衡及步态训练。
通过坐站、行走训练,恢复身体机能,达到步行功能康復效果,帮助患者回归日常生活和工作。
深圳市丞辉威世智能科技有限公司是一家依托自身优秀团队和合作伙伴在康复医疗、人工智能等领域拥有雄厚技术实力,专业从事康复机器人、助力机器人和相关高科技产品研发、生产、销售的国家高新企业。
公司研发的智能下肢外骨骼康复系统包含两款产品,其中的步态下肢外骨骼康复训练机器人获得了本年度德国红点奖,卧式外骨骼康复训练机器人获得了本年度的金芦苇奖。
《设计》梁余意深圳市丞辉威世智能科技有限公司智能下肢外骨骼康复系统设计师,产品经理《设计》:产品前期调研发现了市场、产品和用户的哪些痛点?得出怎样的结论?梁余意:我们在前期走访医院的过程中,发现脑卒中患者在医院现有的康复环节中的早期阶段,康复设备的使用是缺失的,主要的康复效果还是来自康复师的手法的治疗,但是我国康复师的缺口很大,并且一天下来康复师需要为8~10位以上的患者进行手法治疗,对于康复师而言工作强度非常强。
对于患者而言,在脑卒中早期的卧床阶段,由于神经回路被阻断,患侧肢体由于无法运动开始肌肉萎缩和痉挛,这也是常见到脑卒中患者患侧的下肢比健侧下肢更为瘦弱的原因,而康复训练越是早期介入,患者预后的效果越好。
翔宇医疗智能下肢反馈康复训练系统一、产品应用背景及特点:(一)背景:1.长期卧床会导致废用综合症。
废用综合征是指长期卧床不活动,或活动量不足及各种刺激减少的患者,由于全身或局部的生理功能衰退,而出现关节挛缩、肺部感染、褥疮、深静脉血栓、便秘、肌肉萎缩、肺功能下降、体位性低血压、智力减退等一系列征候群。
长期卧床会使下肢静脉血液回流受阻,从而导致血液循环减慢,下肢组织血液供应不好,从而出现肌肉萎缩等症状。
大多数废用综合征的表现可以通过积极的康复训练得到预防,例如站立训练和行走训练。
2.站立床训练可以帮助病人减少各种并发症的发生,维持脊柱、骨盆及下肢的应力负荷,是促进病人功能恢复的有效手段。
但传统站立床治疗让病人处于直立状态不动,通常会引发血液循环方面的并发症。
3.行走是人类生存的基本需要,但常常因为某些疾病而影响了行走,而且行走往往也是患者在康复治疗中的最基本或第一需求。
在中枢神经系统损伤后,与上肢活动恢复相比较,行走的恢复比较快。
4.传统行走训练:需先进行长时间的直立训练和上肢肌力训练,再进行独立站立和平衡训练,完成上述训练后方可进行行走训练,一般需要2~3人搀扶。
这样的训练耗时长,效率低,给治疗师工作负担加重。
并且对患者的要求高,要在清醒的状态下训练,并且有相当的体力和毅力完成训练。
因此临床上急需一种当卧床患者临床状况稳定,就可逐步训练并对他们提出一定挑战的治疗方案。
产品工作原理:通过模拟正常人的行走姿态,对下肢有运动障碍的病人开展下肢康复训练,有助于病人恢复其一定的运动功能.介绍了它的机械结构和工作原理,以及由AVR单片机实现的控制系统和软件设计.经过实验及数据分析,样机具有实现模拟正常人的行走姿态的功能.产品的治疗原理:下肢康复训练机器人能够使患者模拟正常人的步伐规律作康复训练运动,锻炼下肢的肌肉,恢复神经系统对行走功能的控制能力,达到恢复走路机能的目的。
产品优势:·本产品由微电脑自动控制;·操作系统:Windows Ce作为操作平台,彩色触摸屏设计令设置参数变得非常方便·人机对话界面:采用大屏幕彩色触摸液晶屏·训练驱动模式:模拟人体步行曲线函数,在液晶屏上直接显示·可检测下肢痉挛,一旦产生痉挛驱动电路立即停止,避免对肢体造成伤害·语言生物反馈:模仿真人发音,轻松掌握设备运行状态·起立踏步训练系统为直立床与下肢关节康复训练的完善结合,对膝关节、踝关节做主动和被动训练。
2.性能指标2.1性能2.1.1机械部件调节2.1.1.1床体升降范围应在 45cm~86cm 范围内。
2.1.1.2床体直立角度调节范围应在0°~80°内。
2.1.1.3床面腰部后仰角调节范围应在0°~10°范围内。
2.1.1.4腿长调节范围应在 0cm~25cm 范围内。
2.1.2治疗参数2.1.2.1踏步速度a)速度应为 1 步/min~80 步/min,连续可调,步进应为 1 步/min;b)误差应为 1 步/min 或标称值的±5%,取二者中大值。
2.1.2.2踏步角度应在0°~25°范围内。
2.1.2.3治疗时间a)应在 1min~90min 内,连续可调,步进应为 1min;b)默认时间应为 30min;c)误差应为 30s 或标称值的±5%,取二者大值。
2.1.2.4压力范围(A1S 适用)a)A1S 型应能分别测量左/右踏板受到的压力大小;b)测量范围应在 0~60kg 内;c)显示值误差应为 5kg 或±10%,取二者大值。
2.1.3操作功能a)A1 型应具有跟踪模式并描绘跟踪曲线,以实时跟踪显示患者腿部受到电机的力矩的大小;A1S 型应可分别实时跟踪显示患者腿部受到电机的力矩的大小及脚底压力的大小。
b)应具有评估模式并描绘评估曲线,以实现左/右腿训练过程中的僵硬度评估值;c)应具有操作界面模式,能对训练参数进行设置和调整。
d)应具有音乐播送功能。
e)A1S型应具有游戏训练功能。
f)A1S 型应具有记录患者治疗信息的功能。
2.1.4承载能力2.1.4.1设备应能承载 135kg 分布的质量,其形变的量不应大于 5mm。
2.1.4.2设备在承载 135kg 分布的质量的情况下:a)作上、下运动、角度调节呈中间任一位置时,自行下降量不得超过 10mm/h,角度变化量不得超过2°/h;b)设备应能从最低位置起上升。
下肢智能反馈训练系统产品技术要求一康2.性能指标2.1性能2.1.1机械部件调节2.1.1.1床体升降范围应在 45cm~86cm 范围内。
2.1.1.2床体直立角度调节范围应在0°~80°内。
2.1.1.3床面腰部后仰角调节范围应在0°~10°范围内。
2.1.1.4腿长调节范围应在 0cm~25cm 范围内。
2.1.2治疗参数2.1.2.1踏步速度a)速度应为1 步/min~80 步/min,连续可调,步进应为1 步/min;b)误差应为 1 步/min 或标称值的±5%,取二者中大值。
2.1.2.2踏步角度应在0°~25°范围内。
2.1.2.3治疗时间a)应在 1min~90min 内,连续可调,步进应为 1min;b)默认时间应为 30min;c)误差应为 30s 或标称值的±5%,取二者大值。
2.1.2.4压力范围(A1S 适用)a)A1S 型应能分别测量左/右踏板受到的压力大小;b)测量范围应在 0~60kg 内;c)显示值误差应为 5kg 或±10%,取二者大值。
2.1.3操作功能a)A1 型应具有跟踪模式并描绘跟踪曲线,以实时跟踪显示患者腿部受到电机的力矩的大小;A1S 型应可分别实时跟踪显示患者腿部受到电机的力矩的大小及脚底压力的大小。
b)应具有评估模式并描绘评估曲线,以实现左/右腿训练过程中的僵硬度评估值;c)应具有操作界面模式,能对训练参数进行设置和调整。
d)应具有音乐播送功能。
e)A1S型应具有游戏训练功能。
f)A1S 型应具有记录患者治疗信息的功能。
2.1.4承载能力2.1.4.1设备应能承载135kg 分布的质量,其形变的量不应大于5mm。
2.1.4.2设备在承载 135kg 分布的质量的情况下:a)作上、下运动、角度调节呈中间任一位置时,自行下降量不得超过 10mm/h,角度变化量不得超过2°/h;b)设备应能从最低位置起上升。
2性能指标2.1外观与结构2.1.1系统表面应平整、色泽均匀,无明显伤斑、划痕、锈蚀和涂层剥落等缺陷,标记应清晰可见,操作和调节机构应灵活、可靠,紧固件应无松动。
2.1.2电极外观应平整光洁,修边整齐,导电部分颜色均匀。
2.2床面相对水平升高范围应在 50cm ~100cm 范围内连续可调。
2.3脚踏板伸展调节应在 0mm~230mm 范围内连续可调。
2.4床体站立角度相对调节范围应在-13°~90°范围内连续可调。
2.5背板相对调节角度范围应在15°±2°范围内。
2.6脚踏板相对调节范围间距 0mm~260mm,脚平面内外侧和上下角度相对调节范围:55°±2°。
2.7下肢训练屈伸幅度(指床面与下肢固定板相对摆动角度范围)应在10°~55°范围内可调。
2.8步频应在 10 步/分钟~65 步/分钟连续可调,以步/分钟为单位。
2.9治疗时间应在 0 分钟~30 分钟范围内可调,允差为±10%。
2.10痉挛灵敏度应在 500 单位~1500 单位范围内可调。
2.11承载能力2.11.1承载量分布床体承载量的分布应符合表 1 的规定。
2.11.2承载升降a)床体应能承载 135kg 分布质量(按表 1)作上下升降运动,升降至任意一中间位置时,自行下降量不得超过 10mm/h;b)床体能从最低起上升,并能任意升降、停止,不应有停顿和突跳现象。
2.11.3稳定性支撑平台应着地平稳,脚底与水平面差值应≤2mm,可靠定位后不应产生位移。
2.12噪声系统在正常使用时产生的噪声应不大于 60dB(A)。
2.13握持装置系统应至少具备双侧握持装置,以辅助患者训练中维持站立或保护患者安全,握持装置经静载试验后,应无任何断裂、松动等损坏。
2.14安全使用寿命系统应经过 10000 步的使用,各部件应无损坏。
2.15软件要求2.15.1应能实时接收下位机反馈的数据信号。
2019年6月第26卷第12期下肢智能反馈训练系统对脑卒中偏瘫患者下肢运动功能及日常生活能力的影响尉萍脑卒中致残率较高,常并发偏瘫等后遗症,影响患者运动功能及生活质量。
传统康复治疗主要依赖于治疗师经验及徒手操作技术,人力成本相对较高。
下肢智能反馈训练系统是脑卒中偏瘫康复治疗新技术。
本文观察下肢康复机器人辅助训练对脑卒中偏瘫患者下肢运动功能及日常生活能力的影响。
1 资料与方法1.1 对象与分组我科2016—2017年收治的脑卒中偏瘫患者67例,均符合脑卒中诊断标准并经颅脑CT或MRI检查确诊,首次发病,康复治疗时生命体征平稳、意识清楚,可听从指令。
排除合并其他影响步行能力的骨关节疾病、神经肌肉疾病、严重心瓣膜病、心肌病、近期心绞痛发作等。
按照入院时间先后分为对照组32例与观察组35例。
对照组男22例,女10例;平均年龄(59.0±9.4)岁,病程(51.3±13.4)天;脑梗死20例(62.5%),脑出血12例(37.5%);左侧偏瘫11例(34.4%),右侧偏瘫21例(65.6%)。
观察组男27例,女8例;平均年龄(58.0±8.9)岁,病程(52.3±10.9)天;脑梗死21例(60.0%),脑出血14例(40.0%);左侧偏瘫16例(45.7%),右侧偏瘫19例(54.3%)。
两组一般资料接近。
1.2 康复方法两组均采取常规运动康复疗法,以Bobath作者单位:321300 浙江永康市第一人民医院康复科通信作者:尉萍,Email:1449644358@ 技术、神经粗通技术为主,训练内容包括牵张训练、膝关节控制训练、躯干肌控制训练、起坐训练、患侧单腿负重训练、日常生活活动能力训练等,每日2次,每次持续2小时,每周5天,持续训练8周。
观察组联合下肢智能反馈训练系统:采用下肢智能反馈训练系统(AI型,广州—康疗设备实业有限公司),可提供生理步态训练模式,通过对髋膝踝关节协调控制,带动患者模拟正常步行。