极坐标和参数方程
- 格式:ppt
- 大小:2.21 MB
- 文档页数:78
参数方程与极坐标参数方程和极坐标是数学中常用的描述平面曲线的两种方法。
两者分别适用于不同类型的曲线,并且在不同的数学领域中都有广泛的应用。
下面将详细介绍参数方程和极坐标。
1.参数方程参数方程是用参数形式描述曲线的方程。
一条平面曲线可以用参数方程表示为:x=f(t)y=g(t)其中x和y是曲线上的点的坐标,t是参数。
通过改变参数t的取值,我们可以获得曲线上的各个点。
参数方程的优点是可以轻松地描述一些复杂的曲线,例如椭圆、双曲线、直角坐标系不容易表示的曲线等。
此外,参数方程也常用于描述运动学问题,其中x和y可以表示物体在不同时间点的位置。
然而,参数方程也有一些限制。
一条曲线可以有多种不同的参数方程表示,而同一条曲线也可能存在无穷多个参数方程。
因此,在使用参数方程时,需要选择恰当的参数范围以确保曲线的完整性和正确性。
2.极坐标极坐标是一种描述平面上点的方法,其中每个点由一个距离和一个角度组成。
极坐标系中,坐标轴被称为极轴,原点为极点,极轴正方向为极角为0的方向。
一个点的极坐标可以用(r,θ)表示,其中r是点到极点的距离,θ是点相对极轴的角度。
通过改变r和θ的取值,我们可以获得平面上的各个点。
极坐标的优点在于能够简洁地表示出具有对称特点的曲线,例如圆、椭圆、双曲线等。
此外,极坐标也常用于描述极坐标系下的物体运动,其中r和θ可以表示物体在不同时间点的位置。
然而,极坐标也有一些局限性。
极坐标系不适用于描述直线和垂直于极轴的曲线。
此外,极坐标系下的计算也相对复杂,需要进行数学变换来转换为直角坐标系进行计算。
3.参数方程与极坐标的关系参数方程和极坐标是可以相互转换的。
对于一个曲线的参数方程x=f(t),y=g(t),我们可以将x和y转换为极坐标r和θ,从而得到曲线的极坐标方程。
设x=r*cos(θ),y=r*sin(θ),则有:r*cos(θ) = f(t)r*sin(θ) = g(t)通过这个转换,我们可以将一个曲线从参数方程转换为极坐标方程,并反过来。

极坐标与参数方程的求解方法极坐标与参数方程的概述极坐标和参数方程是数学中常用的描述曲线的方法。
极坐标使用极径和极角来表示点的位置,而参数方程使用参数关联横坐标和纵坐标。
在解决数学问题和绘制曲线时,掌握这两种求解方法非常重要。
极坐标的求解方法极坐标的求解方法主要包括确定极径和极角。
下面是一些常用的求解方法:1. 已知直角坐标求解极坐标:通过公式计算出极径和极角。
具体来说,极径可以通过点到原点的距离计算,极角可以通过点的坐标构成的直角三角形的角度计算。
2. 已知极坐标求解直角坐标:通过公式计算出横坐标和纵坐标。
具体来说,横坐标可以通过极径乘以cos(极角)计算,纵坐标可以通过极径乘以sin(极角)计算。
3. 极坐标的运算:对于已知的极坐标,可以进行加减乘除等运算。
极坐标的运算结果仍然是极坐标。
参数方程的求解方法参数方程的求解方法主要包括确定参数的取值范围和参数与直角坐标的关系。
下面是一些常用的求解方法:1. 确定参数的取值范围:通常通过给定的条件来确定参数的取值范围,例如给定一个时间段或一个长度范围。
2. 参数与直角坐标的关系:通过给定的参数与直角坐标之间的关系,可以求解出直角坐标的值。
这个关系可以是线性、二次方程或其他形式的函数关系。
3. 参数方程的求解:通过确定参数的取值范围和参数与直角坐标的关系,可以求解出满足条件的参数方程。
总结极坐标和参数方程是数学中常用的求解曲线问题的方法。
在使用这些方法时,需要掌握相应的求解技巧和公式。
通过熟练掌握这些求解方法,我们可以更好地理解和解决与曲线相关的数学问题。
极坐标与参数方程极坐标和参数方程是解析几何中的两种常见的坐标系统。
它们在描述曲线、曲面和图形等数学问题中具有重要的应用。
本文将就极坐标和参数方程的定义、特点以及应用做详细介绍。
一、极坐标1.1 定义极坐标是用一个有序的有序对(r, θ)来表示平面上的点P。
其中r表示点P到原点的距离,θ表示点P与X轴正半轴的夹角。
极坐标可以看做是极径和极角的一种表示方式。
1.2 特点极坐标的主要特点在于其描述了点P与原点之间的极径和极角关系,而不是点的直角坐标。
极坐标有助于描述某些特殊的图形特征,如圆、扇形和螺旋线等。
1.3 转换关系极坐标与直角坐标之间存在一定的转换关系。
对于平面上一点P(x,y),其转换为极坐标(r,θ)的关系如下:r = √(x² + y²)θ = arctan(y/x)二、参数方程2.1 定义参数方程又称参数表示法,是用参数的形式描述平面上点的坐标。
对于平面上点P,可以使用一组参数t来表示其坐标(x,y),即P(x(t),y(t))。
参数方程可以看做是x和y的函数表达。
2.2 特点参数方程的主要特点在于可以通过参数的变化来描述点的轨迹和运动规律。
参数方程常用于描述曲线、线段和曲面等几何形体,同时也在物理学和工程学中广泛应用。
2.3 转换关系直角坐标和参数方程之间也存在转换关系。
对于平面上一点P(x,y),其对应的参数方程为:x = x(t)y = y(t)三、极坐标与参数方程的应用3.1 几何图形的描述极坐标和参数方程可以更直观地描述某些几何图形。
比如,圆的极坐标方程为(r,θ) = (a, θ),其中a为半径;直线可用参数方程表示,利用参数t可以描述直线的起点、终点和运动方向。
3.2 物理学中的应用极坐标和参数方程在物理学中有着广泛的应用。
例如,带电粒子在磁场中的运动可通过参数方程来描述;振动系统中的物体位置随时间的变化也可以通过参数方程来表示。
3.3 工程学中的应用工程学中常常需要处理复杂的曲线和曲面。
参数方程与极坐标(精华版)y y tsin注意:倾角为的直线,斜率为tan,所以tan=tan,即tcos=tsin,所以cos=sin,即=45,即直线与x轴或y轴夹45角。
Eg:已知直线L过点(1,2)且与x轴夹45角,求直线L的方程。
解:设直线L的参数方程为x=1+tcos45,y=2+tsin45,即x=1+t/2,y=2+t/2,将y=mx+b代入得到m=1,b=3/2,即直线L的方程为y=x+3/2.四、极坐标1、定义:在平面直角坐标系中,点P到原点O的距离r和OP与x轴正半轴的夹角唯一确定点P的位置,称(r,)为点P的极坐标,r为极径,为极角,记作P(r,)。
2、极坐标与直角坐标的转换x=r cos,y=r sinr2=x2+y2,tan=y/x3、常见曲线的极坐标方程1)圆:r=a2)半直线:=0或=3)双曲线:r=a sec或r=a cosec4)椭圆:r=a bcos或r=a sin5)心形线:r=a(1+cos)6)阿基米德螺线:r=a+b7)对数螺线:r=a e b8)伯努利双曲线:r2=a2 sec29)费马螺线:r=2a sin(/2)10)旋轮线:r=a或r=a sin(n)/sin(n为正整数)总结:极坐标的方程形式比较简单,但是不同曲线的极坐标方程需要记忆,转换成直角坐标系方程需要用到三角函数的知识。
P点的有向距离在点P两侧t的符号相反,可以通过直线的参数方程来表示。
其中,t代表有向距离的几何意义。
需要注意的是,t的符号相对于点P,正负在P点两侧,且|PP|=|t|。
直线参数方程可以有多种变式,比如y=y+tsinα和x=x+at,y=y+bt,但此时t的几何意义不是有向距离。
只有当t前面系数的平方和为1时,t的几何意义才是有向距离。
因此,可以将直线参数方程整理为x=x+a2+b2t,XXX,让a2+b2t作为t,这样t的几何意义就是有向距离了。
例如,对于直线x=-1+3t,y=2-4t,可以求其倾斜角。
极坐标与参数方程的区别在数学中,极坐标和参数方程是描述平面上曲线的两种常见表示方法。
尽管它们都可以用来描述复杂的曲线,但它们之间存在着一些重要的区别。
极坐标极坐标是一种使用距离和角度来描述点位置的坐标系统。
它由两个值组成:极径(r)和极角(θ)。
极径表示从原点到点的距离,而极角表示从参考线(通常是正 x 轴)逆时针旋转的角度。
在极坐标系统中,一个点的位置可以用坐标(r,θ)表示。
例如,一个点的极坐标为(2,π/4),意味着它离原点的距离为2,角度为π/4。
极坐标非常适用于描述具有很强对称性的曲线,如圆形、花朵等。
相较于直角坐标系,极坐标具有更直观的表示方式。
通过改变极径和极角的值,可以轻松地绘制出不同形状的曲线。
参数方程参数方程是一种使用参数变量来表示曲线的坐标系统。
它将曲线上的每个点的坐标表示为参数的函数。
在参数方程中,使用参数 t 来描述曲线上的点。
对于每个 t 的取值,对应于该参数值的曲线上存在一个点。
通过将 t 代入参数方程的 x 和 y 分量,可以得到曲线上点的坐标。
例如,参数方程可能会将 x 和 y 的坐标表示为以下函数:x = cos(t)y = sin(t)在这个参数方程中,x 和 y 的值依赖于参数 t 的值。
通过改变 t 的值,可以得到曲线上不同点的坐标。
参数方程非常适合描述复杂的曲线,如椭圆、螺旋线等。
相较于极坐标,参数方程在描述一些非对称的曲线时更加灵活。
通过调整参数的范围,可以绘制出整个曲线或者只绘制其中一部分。
区别与应用极坐标和参数方程在描述曲线时有着不同的方式和应用场景。
下面是两者之间的区别:1.参数数量:极坐标只需要两个参数,即极径和极角;而参数方程可以有多个参数,具体取决于曲线的复杂程度。
2.描述方式:极坐标使用距离和角度来描述点的位置,更适合描述对称的曲线;参数方程使用参数变量来表示点的位置,更适合描述复杂的曲线。
3.表示范围:极坐标可以表示整个曲线,而参数方程可以绘制出整个曲线或者只绘制其中一部分。
思源个性化学习讲义参数方程与极坐标教学任务参数方程与极坐标1、已知方程2cos 3sin x t y t αα=+⎧⎨=+⎩1)若t 为参数,求曲线1C 的普通方程;2)若α为参数,求曲线2C 的普通方程;3)若曲线2C 过原点,(,)M x y 为曲线2C 上任一点,求x y +的最大值。
2、抛物线28cos sin θρθ=上有一点M ,它的极径等于点M 到准线的距离,求点M 的极坐标。
课后作业填空:1、曲线⎩⎨⎧+=+=ty t x 2112(t 为参数,R t ∈)的焦点坐标是_____________2、直线2y x b =+被曲线2sin 2cos x ty t=⎧⎨=⎩(t 为参数)所截得的线段的最大值是_______3、已知极坐标系中,)6,3(πP ,)3,2(πQ 两点,那么直线PQ 与极轴所在直线所夹的锐 角是__________4、在极坐标系中,O 是极点,设点)6,4(πA ,)65,2(πB ,则AB = 5、椭圆3cos ,4sin x y θθ=⎧⎨=-⎩的焦距为6、B A 、两点的极坐标分别为)3,2()3,3(ππ-B A 、,则B A 、两点的距离=AB _______ 7、在极坐标系中,若过点(3,0)且与极轴垂直的直线交曲线θρcos 4=两点,则AB =________8、在极坐标系内,如果圆C :2cos (0)a a ρθ=>与直线l :cos 2ρθ=相切,那么a =9、在极坐标系中,写出与圆θρsin 4=相切的一条直线的方程是。
极坐标与参数方程一、参数方程1.参数方程的概念一般地,在平面直角坐标系中,如果曲线上任意一点的坐标x 、y 都是某个变数t 的函数,即 ⎩⎨⎧==)()(t f y t f x 并且对于t 每一个允许值,由方程组所确定的点M (x ,y )都在这条曲线上(即曲线上的点在方程上,方程的解都在曲线上),那么方程组就叫做这条曲线的参数方程,联系x 、y 之间关系的变数叫做参变数,简称参数.相对于参数方程而言,直接给出点的坐标间关系的方程叫做普通方程.2.参数方程和普通方程的互化曲线的参数方程和普通方程是曲线方程的不同形式,一般地可以通过消去参数而从参数方程得到普通方程.练习1.若直线的参数方程为,则直线的斜率为( )12()23x tt y t=+⎧⎨=-⎩为参数A .B .C .D .2323-3232-2.下列在曲线上的点是( )sin 2()cos sin x y θθθθ=⎧⎨=+⎩为参数A .B .C .D .1(,231(,)42-3.将参数方程化为普通方程为( )222sin ()sin x y θθθ⎧=+⎪⎨=⎪⎩为参数A .B .C .D .2y x =-2y x =+2(23)y x x =-≤≤2(01)y x y =+≤≤注:普通方程化为参数方程,参数方程的形式不一定唯一(由上面练习(1、3可知))。
应用参数方程解轨迹问题,关键在于适当地设参数,如果选用的参数不同,那么所求得的曲线的参数方程的形式也不同。
3.圆的参数方程如图所示,设圆的半径为,点从初始位置出发,按逆时针方向在圆上作匀速圆周运动,设,则。
这就是圆心在原点,半径为的圆的参数方程,其中的几何意义是转过的角度(称为旋转角)。
圆心为,半径为的圆的普通方程是,它的参数方程为:。
4.椭圆的参数方程以坐标原点为中心,焦点在轴上的椭圆的标准方程为其参数方程为,其中参数称为离心角;焦点在轴上的椭圆的标准方程是其参数方程为其中参数仍为离心角,通常规定参数的范围为∈[0,2)。
参数方程与极坐标参数方程知识回顾:一、定义:在取定的坐标系中,如果曲线上任意一点的坐标x、y都是某个参数t的函数,即 ,其中,t为参数,并且对于t每一个允许值,由方程组所确定的点⎩⎨⎧==)()(tfytfxM(x,y)都在这条曲线上,那么方程组就叫做这条曲线的参数方程,联系x、y之间关系的变数t叫做参变数,简称参数.二、二次曲线的参数方程1、圆的参数方程:中心在(x0,y0),半径等于r的圆: (为参数,的几何意义为圆心角),θθsincosryyrxx+=+=θθ特殊地,当圆心是原点时,θθsincosryrx==注意:参数方程没有直接体现曲线上点的横纵坐标之间的关系,而是分别体现了点的横纵坐标与参数间的关系。
Eg1:已知点P(x,y)是圆x2+y2-6x-4y+12=0上的动点,求:(1)x2+y2的最值;(2)x+y的最值;(3)点P到直线x+y-1=0的距离d的最值。
Eg2:将下列参数方程化为普通方程(1) x=2+3cos(2) x=sin(3) x=t+θθt1y=3sin y=cos y=t2+θθ21t总结:参数方程化为普通方程步骤:(1)消参(2)求定义域2、椭圆的参数方程:中心在原点,焦点在x轴上的椭圆: (为参数,的几何意义是离心角,如图角AON是离心角)θθsincosbyax==θθ注意:离心率和离心角没关系,如图,分别以椭圆的长轴和短轴为半径画两个同心圆,M点的轨迹是椭圆,中心在(x0,y0)椭圆的参数方程:θθsincosbyyaxx+=+=Eg :求椭圆=1上的点到M (2,0)的最小值。
203622y x +3、双曲线的参数方程:中心在原点,焦点在x 轴上的双曲线: (为参数,代表离心角),中心在θθtan sec b y a x ==θ(x 0,y 0),焦点在x 轴上的双曲线: θθtan sec 00b y y a x x +=+=4、抛物线的参数方程:顶点在原点,焦点在x 轴正半轴上的抛物线: (t 为参数,p >0,t 的几何意义为过圆点的直线的斜率的倒数)pt y pt x 222==直线方程与抛物线方程联立即可得到。
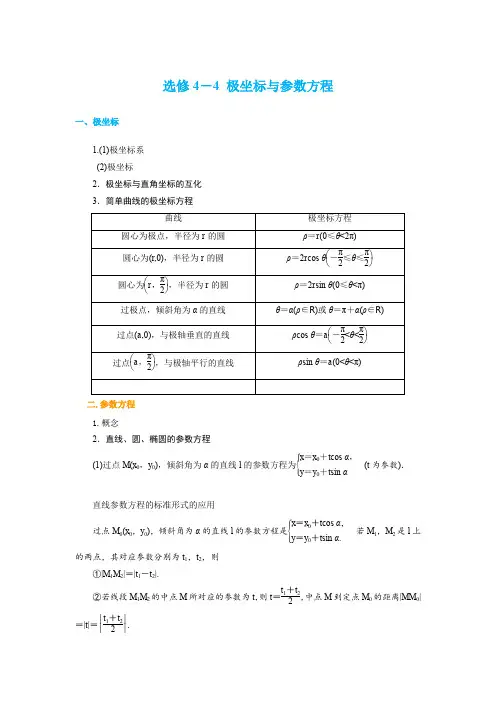
选修4-4 极坐标与参数方程一、极坐标1.(1)极坐标系 (2)极坐标2.极坐标与直角坐标的互化 3.简单曲线的极坐标方程二.参数方程 1.概念2.直线、圆、椭圆的参数方程(1)过点M (x 0,y 0),倾斜角为α的直线l 的参数方程为⎩⎪⎨⎪⎧x =x 0+t cos α,y =y 0+t sin α(t 为参数).直线参数方程的标准形式的应用过点M 0(x 0,y 0),倾斜角为α的直线l 的参数方程是⎩⎪⎨⎪⎧x =x 0+t cos α,y =y 0+t sin α.若M 1,M 2是l 上的两点,其对应参数分别为t 1,t 2,则①|M 1M 2|=|t 1-t 2|.②若线段M 1M 2的中点M 所对应的参数为t ,则t =t 1+t 22,中点M 到定点M 0的距离|MM 0|=|t |=⎪⎪⎪⎪t 1+t 22.③若M 0为线段M 1M 2的中点,则t 1+t 2=0. ④|M 0M 1||M 0M 2|=|t 1t 2|.(2)圆心在点M 0(x 0,y 0),半径为r 的圆的参数方程为⎩⎪⎨⎪⎧x =x 0+r cos θ,y =y 0+r sin θ(θ为参数).1. (3)椭圆x 2a 2+y 2b 2=1(a >b >0)的参数方程为⎩⎪⎨⎪⎧x =a cos φ,y =b sin φ (φ为参数)一、极坐标方程与直角坐标方程互化及判断曲线类型【例1】化下列极坐标方程为直角坐标方程,并说明它是什么曲线。
(1) 2540ρρ-+=; (2) 53cos 4sin ρθθ=+;(3) 523cos ρθ=-; (4)242ππρθθρ-+=, 其中R ρ∈【解析】(1)方程变形为(1)(4)0ρρ--=,∴1ρ=或4ρ=,即221x y +=或2216x y +=, 故原方程表示圆心在原点半径分别为1和4的两个圆。
(2) 变形得3cos 4sin 5ρθρθ+=,即3450x y +-=,故原方程表示直线3450x y +-=。

极坐标系1.极坐标系的概念(1)极坐标系如图所示,在平面内取一个定点O,点O叫做极点,自极点O引一条射线Ox,Ox叫做极轴;再选定一个长度单位、一个角度单位(通常取弧度)及其正方向(通常取逆时针方向),这样就建立了一个极坐标系.(2)极坐标一般地,没有特殊说明时,我们认为ρ≥0,θ可取任意实数.(3)点与极坐标的关系一般地,极坐标(ρ,θ)与(ρ,θ+2kπ)(k∈Z)表示同一个点,特别地,极点O的坐标为(0,θ)(θ∈R),和直角坐标不同,平面内一个点的极坐标有无数种表示.如果规定ρ>0,0≤θ<2π,那么除极点外,平面内的点可用唯一的极坐标(ρ,θ) 表示;同时,极坐标(ρ,θ)表示的点也是唯一确定的.2.极坐标与直角坐标的互化点M 直角坐标(x,y) 极坐标(ρ,θ)互化公式极坐标方程化为直角坐标方程的步骤第一步判断极坐标的极点与直角坐标系的原点是否重合,且极轴与x轴正半轴是否重合,若上述两个都重合,则极坐标方程与直角坐标方程可以互化第二步通过极坐标方程的两边同乘ρ或同时平方构造ρcos θ,ρsin θ,ρ2的形式,一定要注意变形过程中方程要保持同解,不要出现增解或漏解第三步根据极坐标方程与直角坐标方程的互化公式及ρ2=x2+y2将极坐标方程转化为直角坐标方程直角坐标方程化为极坐标方程或直角坐标系中的点的坐标化为极坐标(1)直角坐标方程化为极坐标方程较为简单,只需将直角坐标方程中的x,y 分别用ρcos θ,ρsin θ代替即可得到相应极坐标方程.(2)求直角坐标系中的点(x,y)对应的极坐标的一般步骤:第一步,根据直角坐标系中两点间的距离公式计算该点与坐标原点的距离,即计算ρ;第二步,根据角θ的正切值tan θ=(x≠0)求出角θ(若正切值不存在,则该点在y轴上),问题即解.[例1] 在极坐标系下,已知圆O:ρ=cos θ+sin θ和直线l:ρsin=.(1)求圆O和直线l的直角坐标方程;(2)当θ∈(0,π)时,求直线l与圆O公共点的一个极坐标.[解] (1)圆O:ρ=cos θ+sin θ,即ρ2=ρcos θ+ρsin θ,圆O的直角坐标方程为:x2+y2=x+y,即x2+y2-x-y=0,直线l:ρsin=,即ρsin θ-ρcos θ=1,则直线l的直角坐标方程为:y-x=1,即x-y+1=0.(2)由得则直线l与圆O公共点的一个极坐标为.[例2] (2017·福州五校联考)已知曲线C的极坐标方程为ρ2-2ρcos-2=0.以极点为平面直角坐标系的原点,极轴为x轴的正半轴,建立平面直角坐标系xOy.(1)若直线l过原点,且被曲线C截得的弦长最小,求直线l的直角坐标方程;(2)若M是曲线C上的动点,且点M的直角坐标为(x,y),求x+y的最大值.[解] (1)ρ2-2ρcos-2=0,即ρ2-2ρcos θ+2ρsin θ-2=0,将代入得曲线C的直角坐标方程为(x-1)2+(y+1)2=4,圆心C(1,-1),若直线l被曲线C截得的弦长最小,则直线l与OC垂直,即kl·kOC=-1,kOC=-1,因而kl=1,故直线l的直角坐标方程为y=x.(2)因为M是曲线C上的动点,因而利用圆的参数方程可设(φ为参数),则x+y=2sin φ+2cos φ=2sin,当sin=1时,x+y取得最大值2.[全国卷5年真题集中演练]1.(2016·全国乙卷)在直角坐标系xOy中,曲线C1的参数方程为(t为参数,a>0).在以坐标原点为极点,x轴正半轴为极轴的极坐标系中,曲线C2:ρ=4cos θ.(1)说明C1是哪一种曲线,并将C1的方程化为极坐标方程;(2)直线C3的极坐标方程为θ=α0,其中α0满足tan α0=2,若曲线C1与C2的公共点都在C3上,求a.解:(1)消去参数t得到C1的普通方程为x2+(y-1)2=a2,则C1是以(0,1)为圆心,a为半径的圆.将x=ρcos θ,y=ρsin θ代入C1的普通方程中,得到C1的极坐标方程为ρ2-2ρsin θ+1-a2=0.(2)曲线C1,C2的公共点的极坐标满足方程组若ρ≠0,由方程组得16cos2θ-8sin θcos θ+1-a2=0,由已知tan θ=2,可得16cos2θ-8sin θcos θ=0,从而1-a2=0,解得a=-1(舍去)或a=1.当a=1时,极点也为C1,C2的公共点,且在C3上.所以a=1.2.(2015·新课标全国卷Ⅰ)在直角坐标系xOy中,直线C1:x=-2,圆C2:(x-1)2+(y-2)2=1,以坐标原点为极点,x轴的正半轴为极轴建立极坐标系.(1)求C1,C2的极坐标方程;(2)若直线C3的极坐标方程为θ=(ρ∈R),设C2与C3的交点为M,N,求△C2MN的面积.解:(1)因为x=ρcos θ,y=ρsin θ,所以C1的极坐标方程为ρcos θ=-2,C2的极坐标方程为ρ2-2ρcos θ-4ρsin θ+4=0.(2)将θ=代入ρ2-2ρcos θ-4ρsin θ+4=0,得ρ2-3ρ+4=0,解得ρ1=2,ρ2=.故ρ1-ρ2=,即|MN|=.由于C2的半径为1,所以△C2MN的面积为.参数方程1.参数方程一般地,在平面直角坐标系中,如果曲线上任意一点的坐标x,y都是某个变数t的函数:并且对于t的每一个允许值,由方程组所确定的点M(x,y)都在这条曲线上,那么方程就叫做这条曲线的参数方程,变数t叫做参变数,简称参数.相对于参数方程而言,直接给出点的坐标间关系的方程叫做普通方程.2.直线、圆、椭圆的参数方程(1)过点M(x0,y0),倾斜角为α的直线l的参数方程为(t为参数).(2)圆心在点M0(x0,y0),半径为r的圆的参数方程为(θ为参数).(3)椭圆+=1(a>b>0)的参数方程为(φ为参数).例:将下列参数方程化为普通方程(θ为参数).解:∵y=-1+cos 2θ=-1+1-2sin2θ=-2sin2θ,sin2θ=x-2,∴y=-2x+4,∴2x+y-4=0.∵0≤sin2θ≤1,∴0≤x-2≤1,∴2≤x≤3,∴所求的普通方程为2x+y-4=0(2≤x≤3).解决直线与圆锥曲线的参数方程的应用问题,其一般思路如下:第一步,把直线和圆锥曲线的参数方程都化为普通方程;第二步,根据直线与圆锥曲线的位置关系解决问题.2.当直线经过点P(x0,y0),且直线的倾斜角为α,求直线与圆锥曲线的交点、弦长问题时,可以把直线的参数方程设成(t为参数),交点A,B对应的参数分别为t1,t2,计算时把直线的参数方程代入圆锥曲线的直角坐标方程,求出t1+t2,t1·t2,得到|AB|=|t1-t2|=.[例2] (2017·豫南九校联考)在直角坐标系xOy中,设倾斜角为α的直线l:(t为参数)与曲线C:(θ为参数)相交于不同的两点A,B.(1)若α=,求线段AB的中点M的坐标;(2)若|PA|·|PB|=|OP|2,其中P(2,),求直线l的斜率.[解] (1)将曲线C的参数方程化为普通方程是+y2=1.当α=时,设点M对应的参数为t0.直线l的方程为(t为参数),代入曲线C的普通方程+y2=1,得13t2+56t+48=0,设直线l上的点A,B对应参数分别为t1,t2.则t0==-,所以点M的坐标为.(2)将代入曲线C的普通方程+y2=1,得(cos2α+4sin2α)t2+(8sin α+4cos α)t+12=0,因为|PA|·|PB|=|t1t2|=,|OP|2=7,所以=7,得tan2α=.由于Δ=32cos α(2sin α-cos α)>0,故tan α=.所以直线l的斜率为.参数方程与极坐标方程的综合问题例.已知曲线C的参数方程为(α为参数),以直角坐标系原点为极点,x轴正半轴为极轴建立极坐标系.(1)求曲线C的极坐标方程,并说明其表示什么轨迹;(2)若直线的极坐标方程为sin θ-cos θ=,求直线被曲线C截得的弦长.解:(1)∵曲线C的参数方程为(α为参数),∴曲线C的普通方程为(x-3)2+(y-1)2=10,①曲线C表示以(3,1)为圆心,为半径的圆.将代入①并化简,得ρ=6cos θ+2sin θ,即曲线C的极坐标方程为ρ=6cos θ+2sin θ.(2)∵直线的直角坐标方程为y-x=1,∴圆心C到直线的距离为d=,∴弦长为2=.[全国卷5年真题集中演练]1.(2016·全国甲卷)在直角坐标系xOy中,圆C的方程为(x+6)2+y2=25.(1)以坐标原点为极点,x轴正半轴为极轴建立极坐标系,求C的极坐标方程;(2)直线l的参数方程是(t为参数),l与C交于A,B两点,|AB|=,求l的斜率.解:(1)由x=ρcos θ,y=ρsin θ可得圆C的极坐标方程为ρ2+12ρcos θ+11=0.(2)在(1)中建立的极坐标系中,直线l的极坐标方程为θ=α(ρ∈R).设A,B所对应的极径分别为ρ1,ρ2,将l的极坐标方程代入C的极坐标方程得ρ2+12ρcos α+11=0.于是ρ1+ρ2=-12cos α,ρ1ρ2=11.|AB|=|ρ1-ρ2|==.由|AB|=得cos2α=,tan α=±.所以直线l的斜率为或-.2.(2016·全国丙卷)在直角坐标系xOy中,曲线C1的参数方程为(α为参数).以坐标原点为极点,以x轴的正半轴为极轴,建立极坐标系,曲线C2的极坐标方程为ρsin=2.(1)写出C1的普通方程和C2的直角坐标方程;(2)设点P在C1上,点Q在C2上,求|PQ|的最小值及此时P的直角坐标.解:(1)C1的普通方程为+y2=1,C2的直角坐标方程为x+y-4=0.(2)由题意,可设点P的直角坐标为(cos α,sin α).因为C2是直线,所以|PQ|的最小值即为P到C2的距离d(α)的最小值,继续阅读。
参数方程与极坐标方程的互化在数学中,参数方程和极坐标方程是两种常见的方式用来描述曲线或者图形。
它们可以相互转化,在不同的问题中有着不同的应用。
本文将介绍参数方程和极坐标方程的概念以及它们之间的互化关系。
一、参数方程参数方程也被称为参数式、参数表示或参数方向式,是一种以参数的形式给出自变量和因变量之间关系的表达方式。
1.1 参数方程的定义在平面直角坐标系中,参数方程由一组参数方程式组成。
对于函数y=f(x),其对应的参数方程可表示为:x = x(t)y = y(t)其中,x(t)和y(t)是自变量t的函数。
参数t的取值范围决定了曲线的形状。
1.2 参数方程的特点参数方程的主要特点是可以描述不同类型的曲线,例如直线、圆、椭圆、双曲线等。
参数方程能够描述多段函数和具有断点的函数,因此在分段函数及闭区间上的函数中,参数方程具有很大的优势。
此外,参数方程还可以方便地表示曲线上的点的速度、加速度等物理量的变化。
在物理学、力学等自然科学中,参数方程常常用来描述物体的运动轨迹。
二、极坐标方程极坐标方程是一种以极径和极角来表示点的坐标的方式。
它与参数方程不同,是一种极坐标系中的表达方式。
2.1 极坐标方程的定义在平面极坐标系中,每个点的位置由极径r和极角θ来决定。
极坐标方程可表示为:r = r(θ)其中,r(θ)是极角θ的函数。
不同的θ对应于平面上的不同点。
2.2 极坐标方程的特点极坐标方程更适合描述圆形、对称图形以及螺旋线等。
通过变换不同的极角θ,可以得到曲线上的不同点。
极坐标方程在描述对称性和周期性的问题时具有很大的优势。
此外,极坐标方程对于描述二维平面上的旋转运动和周期性运动非常方便。
在物理领域中,极坐标方程经常用于描述振荡、波动等周期性现象。
三、参数方程与极坐标方程的互化参数方程和极坐标方程之间存在着一定的互化关系,可以通过一定的转换得到相对应的形式。
3.1 参数方程转化为极坐标方程将参数方程转化为极坐标方程的方法主要是通过解方程组得到极坐标方程式。
极坐标参数方程万能公式极坐标与参数方程公式:x=ρcosθ,y=ρsinθ,tanθ=y/x,x²+y²=ρ²。
坐标系与参数方程公式x=ρcosθ,y=ρsinθtanθ=y/x,x²+y²=ρ²有些曲线的方程在直角坐标里面不太好处理,于是我们把它换在极坐标中处理。
例如经过上面式子的变换:以原点为圆心的圆的方程:ρ=R双曲线,椭圆,抛物线的极坐标统一形式:ρ=eP/(1-ecosθ),P为焦准距,e为离心率。
常见参数方程极坐标方程用极坐标系描述的曲线方程称作极坐标方程,通常用来表示ρ为自变量θ的函数。
极坐标方程经常会表现出不同的对称形式,如果ρ(−θ)=ρ(θ),则曲线关于极点(0°/180°)对称,如果ρ(π-θ)=ρ(θ),则曲线关于极点(90°/270°)对称,如果ρ(θ−α)=ρ(θ),则曲线相当于从极点逆时针方向旋转α°。
圆在极坐标系中,圆心在(r,φ)半径为r的圆的方程为ρ=2rcos(θ-φ)另:圆心M(ρ',θ')半径r的圆的极坐标方程为:(ρ')²+ρ²-2ρρ'cos(θ-θ')=r²根据余弦定理可推得。
直线经过极点的射线由如下方程表示θ=φ,其中φ为射线的倾斜角度,若m为直角坐标系的射线的斜率,则有φ=arctanm。
任何不经过极点的直线都会与某条射线垂直。
这些在点(r′,φ)处的直线与射线θ=φ垂直,其方程为r′(θ)=r′sec(θ-φ)。
玫瑰线极坐标的玫瑰线是数学曲线中非常著名的曲线,看上去像花瓣,它只能用极坐标方程来描述,方程如下:r(θ)=acoskθ或r(θ)=asinkθ,如果k是整数,当k是奇数时那么曲线将会是k个花瓣,当k是偶数时曲线将是2k个花瓣。
如果k为非整数,将产生圆盘(disc)状图形,且花瓣数也为非整数。
极坐标与参数方程1.直角坐标系与极坐标系可以互相转换。
在两个坐标系中取相同的长度单位,将直角坐标系的原点作为极点,x轴正半轴作为极轴。
对于任意点M,其直角坐标为(x,y),极坐标为(ρ,θ),其中ρ表示点M到原点的距离,θ表示点M与极轴的夹角。
它们之间的关系是ρ²=x²+y²,x=ρcosθ,y=ρsinθ,tanθ=y/x(当x≠0时)。
2.直线的极坐标方程为ρsin(θ-α)=d,其中d为直线到极点的距离,α为极轴到直线的角度。
对于特殊位置的直线,如过极点的直线、过点M(a,0)且垂直于极轴的直线、过点M(b,π/2)且平行于极轴的直线,它们的极坐标方程分别为θ=α、ρcosθ=a、ρsinθ=b。
3.圆的极坐标方程为2ρ²-2ρr cos(θ-θ0)+r²=0,其中M(ρ,θ)为圆心,r为半径,θ0为极轴与圆心连线的角度。
对于特殊位置的圆,如圆心位于极点且半径为r的圆,其极坐标方程为ρ=r;圆心位于M(r,0)且半径为r的圆,其极坐标方程为ρ=2rcosθ;圆心位于M(r,π/2)且半径为r的圆,其极坐标方程为ρ=2r sinθ。
4.直线的参数方程为x=x0+t cosα,y=y0+t sinα,其中M(x0,y0)为直线上的一点,α为直线倾斜角,t为参数。
5.圆的参数方程为x=x0+r cosθ,y=y0+r sinθ,其中M(x0,y0)为圆心,r为半径,θ为参数,0≤θ≤2π。
6.椭圆的参数方程为x=a cosθ,y=b sinθ,其中a、b为长轴和短轴的长度;抛物线的参数方程为x=2pt²,y=2pt,其中p 为焦距的一半。
1.给定曲线C的极坐标方程ρ=2cosθ,在以极点为原点、x 轴正半轴为极轴的直角坐标系中,其参数方程为x=2cos(t),y=2sin(t)。
2.给定曲线C的参数方程为x=t²,y=t,在以原点为极点、x轴正半轴为极轴的极坐标系中,其极坐标方程为ρ=tan(θ)。
极坐标与参数方程知识讲解参数方程和极坐标系(一)曲线的参数方程的定义:在取定的坐标系中,如果曲线上任意一点的坐标x 、y 都是某个变数t 的函数,即并且对于t 每一个允许值,由方程组所确定的点M (x ,y )都在这条曲线上,那么方程组就叫做这条曲线的参数方程,联系 x 、y 之间关系的变 数叫做参变数,简称参数.(二)常见曲线的参数方程如下:1. 过定点(X o ,y o ),倾角为a 的直线:其中参数t 是以定点P (x o ,y o )为起点,对 应于t 点M (x, y )为终点的有向线段PM 的数量, 又称为点P 与点M 间的有向距离.根据t 的几何意义,有以下结论.①.设A 、B 是直线上任意两点,它们对应的 参数分别为 t A 和 t B ,则 |AB = |t^t A= J (tBYA )' -4t A t B .2. 中心在(x o , y o ),半径等于r 的圆:知识要点X=X 0tcos :y = y 0(t 为参数)(2 .线段AB 的中点所对应的参数值等于t A t Bx =X Q r COST y = y 0 rsin3 •中心在原点,焦点在x 轴(或y 轴)上的 椭圆: 沃 •为参数)(或 )1y 二 bs iny = asi nr 丿中心在点(x0,y0)焦点在平行于x 轴的直线上 的椭圆的参数方程x]xo:cos[ X-为参数)y = y 0 +bsi na.焦点在x 轴(或y 轴)上的2、极坐标有四个要素:①极点;②极轴;③ 长度单位;④角度单位及它的方向.极坐标与直角 坐标都是一对有序实数确定平面上一个点,在极坐 标系下,一对有序实数 —对应惟一点P (,), 但平面内任一个点P 的极坐标不惟一.一个点可以 有无数个坐标,这些坐标又有规律可循的,PC',) (极点除外)的全部坐标为C',r + 2k :J 或((2k l ):),(k Z ).极点的极径为0,而极角任意取.若5. 线:顶点在原点, 焦点在X 轴正半轴上的抛物x =2pt 2y = 2pt (t 为参数, 4. 双曲线:(A 为参数) (或(二为参数) 中心在原点,P> 0)直线的参数方程和参数的几何意义过定点P (X o, y°),倾斜角为a的直线的参数方程是其阳瞌;(t为参数).J3.2极坐标系1、定义:在平面内取一个定点0,叫做极点,引一条射线Ox,叫做极轴,再选一个长度单位和角度的正方向(通常取逆时针方向)。
极坐标与参数方程极坐标和参数方程是数学中两种不同的表示函数关系的方式。
极坐标主要用于描述平面上的点的位置,而参数方程则常用于描述曲线的形状。
极坐标(Polar coordinates)是一种用极径和极角表示平面上点的坐标系统。
在极坐标系中,平面上的点被表示为(r, θ),其中r为点到原点的距离,θ为该点与正方向x轴的夹角。
极坐标的转换公式为:x = r * cos(θ)y = r * sin(θ)极坐标系常用于描述圆形、扇形等几何图形,其特点在于方便描述对称性以及圆心对称等特殊性质。
此外,极坐标系还广泛应用于物理学、工程学等领域。
参数方程(Parametric equations)是用参数表示的函数关系式,常用于描述曲线的运动或形状。
参数方程中,自变量和因变量都是参数的函数,通常表示为:x = f(t)y = g(t)参数方程主要用于描述非线性曲线、曲面以及具有特殊性质的图像。
由于使用参数方程时可自由选择参数的取值范围,因此可以灵活地表示各种曲线。
参数方程的优点在于可以轻松地描述复杂的曲线,如椭圆、双曲线和螺旋曲线等。
此外,在物理学、计算机图形学等领域中也经常使用参数方程描述运动轨迹和形状。
综上所述,极坐标和参数方程是两种不同的数学表示方法,各自适用于不同的场景。
极坐标适用于描述平面上点的位置和几何图形,而参数方程则适用于描述曲线的形状和运动。
无论是在几何学、物理学还是工程学等领域,这两种方法都有着广泛的应用。
熟练掌握和灵活运用极坐标和参数方程,将有助于解决各种数学和科学问题的建模与求解。