基于三维激光扫描数据的建筑物三维建模_吴静(1)
- 格式:pdf
- 大小:477.34 KB
- 文档页数:4
基于三维激光扫描数据的建筑物三维建模吴 静,靳奉祥,王 健(山东科技大学地球信息科学与工程学院,山东青岛266510)摘 要:给出基于三维激光扫描测量仪所获得的点云数据来实现建筑物三维建模的方法。
文中介绍了三维激光扫描测量仪的系统组成与工作原理,给出对点云数据处理的过程和方法,阐述建筑物三维建模的方法,并用实例介绍整体方法的实现过程和效果。
关键词:三维激光扫描测量;点云数据;三维建模中图分类号:P209 文献标识码:A 文章编号:1006-7949(2007)05-0057-04Three dimension modeling of buildings based onthree dimension laser scanner dataWU Jing ,J IN Feng 2xiang ,WAN G Jian(G eo 2info Science &Engineering College ,Shandong University of Science and Technology ,Qingdao 266510,China )Abstract :The approaches producing the 3D models of buildings based on points cloud obtained from 3d laser scanner are discussed in this paper.This paper first introduces the system composition and the working principle of 3D laser scanner ,and then points out the procedure and methods to process the points cloud.Finally ,the method producing the 3D models of buildings is expatiated and the procedure and the result of this approach are introduced with a factual example.K ey w ords :three dimension laser scanning surreying ;points cloud ;three dimension modeling收稿日期:2006-12-20项目来源:国家自然科学基金资助项目(40574001);山东省教育厅科技计划资助项目(J06G07)作者简介:吴 静(1983~),女,硕士. 激光扫描技术在工业模具设计和制造方面,特别是在逆向工程中,已经有了广泛的应用。

基于三维激光扫描仪的三维文物模型的建立徐凯;郝洪美;郭亚兴【摘要】三维激光扫描仪可以连续、自动、快速获取目标物表面的采样点数据.本文以文物为例,介绍三维激光扫描仪的工作原理,给出三维数据获取、数据处理、模型建立的基本方法和结果.探讨采用点云数据进行文物建模的方法.【期刊名称】《北京测绘》【年(卷),期】2014(000)004【总页数】3页(P120-122)【关键词】三维激光扫描;文物;建模【作者】徐凯;郝洪美;郭亚兴【作者单位】吉林省基础测绘院,吉林四平136001;吉林省基础测绘院,吉林四平136001;吉林省基础测绘院,吉林四平136001【正文语种】中文【中图分类】P234.4随着信息科学技术的不断发展,三维模拟、实物重构、虚拟现实等理论的相继提出,人们对事物的认识已从平面二维空间,逐渐转向空间三维立体思维模式。
三维激光扫描仪的出现解决了这一实际问题,特别是机载激光扫描系统发展很快,已经用于快速获取大面积的三维地形数据[l]。
基于地面的三维激光扫描系统目前正引起广泛的关注,是三维激光扫描发展的一个重要方向,已在数字化文物保护、工业测量、数字城市、地形可视化、智能交通、土木工程等领域有着广泛的应用。
传统的测量方式是单点采集,获取的是单点数据,而三维激光扫描测量技术不需要合作目标,可以自动、连续、快速地获取目标物表面的密集采样点数据,即点云数据。
获取的信息量也从点的空间位置信息扩展到目标物的纹理信息和颜色信息,并且拥有许多自己独特的优势,例如①数据获取速度快、实时性强;②数据量大,精度较高;③主动性强,能全天候工作;④全数字特征,信息传输、加工、表达容易[2]。
本文采用Leica的HDS8800三维激光扫描仪,结合三维激光扫描仪的基本工作原理,探讨从数据获取到建模的整个流程。
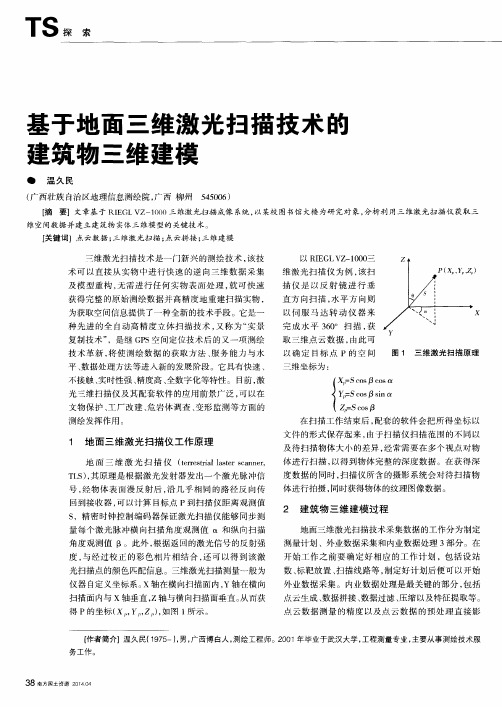
1 三维激光扫描原理1.1 三维激光扫描仪工作原理三维激光扫描仪的构造主要包括:一台高速精确的激光测距仪、一组可以引导激光并以均匀角速度扫描的反射棱镜,部分仪器具有内置的数码相机,可以直接获得目标物的影像。

信息化技术下的酒店成本管理分析随着信息化技术的不断发展和普及,酒店业也在不断探索如何通过信息化技术来提高管理效率和降低成本。
酒店成本管理一直是酒店经营管理的一个重要环节,信息化技术的应用对酒店成本管理带来了新的机遇和挑战。
本文将从信息化技术对酒店成本管理的影响、信息化技术下的酒店成本管理的现状和未来发展趋势等方面展开分析。
1. 提高管理效率信息化技术的应用可以帮助酒店实现业务流程的自动化和智能化,提高了员工的工作效率。
酒店可以通过信息化技术来管理客房预订、房态管理、库存管理等,降低人力成本,提高管理效率。
2. 降低运营成本信息化技术可以帮助酒店实现设备的智能化管理和能源消耗的监控,从而降低能源成本和设备维护成本。
信息化技术也可以帮助酒店优化采购流程、降低采购成本,提高采购效率。
3. 提升客户体验信息化技术的应用可以帮助酒店提升客户体验,从而增加客户满意度和忠诚度,进而提高酒店的收入和盈利能力。
1. 酒店对信息化技术的应用程度不足目前,大部分酒店对信息化技术的应用还比较落后,很多酒店仍然采用传统的手工管理方式,导致了管理效率低下和成本偏高。
2. 酒店信息化技术的投入和回报不匹配部分酒店在引入信息化技术的过程中,往往只注重了技术的引入,却忽略了对员工的培训和对业务流程的优化,导致了信息化技术的投入和回报不匹配的问题。
3. 酒店信息化技术的应用局限性目前,酒店信息化技术的应用主要集中在客房预订、房态管理等传统领域,对于成本管理、采购管理等管理环节的应用还比较有限。
三、信息化技术下酒店成本管理的发展趋势1. 多元化的信息化技术应用未来,信息化技术在酒店成本管理方面将呈现出多元化的发展趋势,不仅包括客房管理系统、客户关系管理系统等传统系统的应用,还将涉及到成本核算系统、采购管理系统等新型系统的引入和应用。
2. 数据驱动的成本管理未来,酒店将越来越重视数据分析在成本管理中的应用,利用大数据和人工智能等技术来实现成本的精细化管理和优化,提高管理效率,降低运营成本。
基于三维激光扫描技术的建筑数字化中的研究在科技的巨轮下,建筑领域也迎来了一场革命性的变革。
这场变革的主角,就是三维激光扫描技术。
它如同一把神奇的钥匙,打开了建筑数字化的大门,让我们得以一窥未来建筑世界的奥秘。
首先,我们要明白,三维激光扫描技术并不是简单的“拍照”或“录像”。
它更像是一位细心的画家,用无数精细的线条和色彩,将建筑物的每一寸肌肤都描绘得淋漓尽致。
这种技术的引入,使得建筑的测量和建模工作变得更加精确和高效。
过去那些耗时数月甚至数年的工作,现在只需几天甚至几小时就能完成。
这无疑是一个巨大的进步。
然而,任何技术的发展都不是一帆风顺的。
三维激光扫描技术在带来便利的同时,也带来了新的挑战。
首当其冲的就是数据量的问题。
每一次扫描,都会产生大量的数据。
这些数据如同一座座高山,需要我们去攀登和探索。
如何有效地处理和利用这些数据,成为了一个亟待解决的问题。
此外,技术的更新换代速度也非常快,这就要求我们必须不断学习和适应新的工具和方法。
尽管如此,我们不能否认三维激光扫描技术给建筑领域带来的巨大影响。
它不仅仅是一种工具,更是一种思维方式的转变。
在过去,我们习惯于用二维的视角去看待世界,而现在我们可以用三维的视角去观察和理解事物。
这种转变无疑会激发出更多的创新和灵感。
举个例子来说,三维激光扫描技术在历史建筑保护领域的应用就是一个典型的例子。
过去,我们只能通过照片和图纸来了解和保护历史建筑。
而现在,我们可以利用这项技术获取到历史建筑的每一个细节和结构信息。
这不仅有助于我们更好地了解和保护历史建筑,还可以为未来的修复和重建工作提供宝贵的数据支持。
当然,技术的发展永远都是一把双刃剑。
我们在享受其带来的便利的同时,也必须面对其带来的挑战和问题。
这就需要我们有清醒的认识和正确的应对策略。
我们不能盲目地追求技术的更新换代,而忽视了其可能带来的负面影响。
相反,我们应该更加理性地看待技术的发展和应用,既要充分利用其优点,也要防范其缺点。
基于三维激光扫描技术的建筑物三维建模本文介绍了地面三维激光扫描的工作原理,研究了点云数据滤波去噪、点云拼接、曲面重构等数据处理技术以及三维建模,实例结果表明,基于地面三维激光扫描技术建立的建筑物三维模型可以较好地表达建筑物的几何特征。
标签:点云数据三维激光扫描点云拼接三维建模1引言三维激光扫描技术是一门新兴的测绘技术,该技术可以真正做到直接从实物中进行快速的逆向三维数据采集及模型重构,无需进行任何实物表面处理,快速获得完整的原始测绘数据并高精度地重建扫描实物,为获取空间信息提供了一种全新的技术手段。
它是一种先进的全自动高精度立体扫描技术,又称为“实景复制技术”,是继GPS空间定位技术后的又一项测绘技术革新。
目前,激光三维扫描仪及其配套软件的应用前景广泛,可以在文物保护、工厂改建、危岩体调查、变形监测、桥梁改建、电力设施测量、大型工业设备的安装监测、溶洞调查、数字城市地形可视化测量、城乡规划测量等方面的测绘发挥作用。
本文基于RIEGL VZ-1000三维激光扫描成像系统,以某校圖书馆大楼为研究对象,探讨分析利用三维激光扫描仪获取空间三维空间数据并建立建筑物实体三维模型的技术方法。
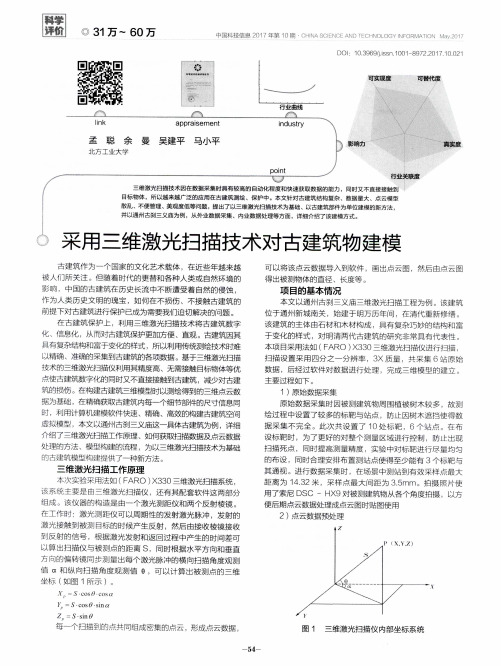
2地面三维激光扫描仪工作原理地面型三维激光扫描系统工作原理为扫描仪发射器发出一个激光脉冲信号,经物体表面漫反射后,沿几乎相同的路径反向传回到接收器,可以计算目标点P 与扫描仪距离S,控制编码器同步测量每个激光脉冲横向扫描角度观测值α和纵向扫描角度观测值β。
三维激光扫描测量一般为仪器自定义坐标系,X轴在横向扫描面内,Y轴在横向扫描面内与X轴垂直,Z轴与横向扫描面垂直。
3建筑物三维建模过程3.1数据采集地面三维激光扫描获得的原始数据由离散矢量距离点构成,它是一个点的集合,称之为“点云”。
建筑物的表面模型即由这些点集构成。
在利用三维激光扫描仪对建筑物进行数据采集之前,需依据实地的地形、建筑物的大小与复杂程度等因素,设计合理的扫描路线,确定标靶数与标靶位置,确定合理的扫描范围、采样密度以及扫描距离。
基于三维激光扫描数据的建筑物三维建模吴 静,靳奉祥,王 健(山东科技大学地球信息科学与工程学院,山东青岛266510)摘 要:给出基于三维激光扫描测量仪所获得的点云数据来实现建筑物三维建模的方法。
文中介绍了三维激光扫描测量仪的系统组成与工作原理,给出对点云数据处理的过程和方法,阐述建筑物三维建模的方法,并用实例介绍整体方法的实现过程和效果。
关键词:三维激光扫描测量;点云数据;三维建模中图分类号:P209 文献标识码:A 文章编号:1006-7949(2007)05-0057-04Three dimension modeling of buildings based on three dimension laser scanner dataWU Jing ,JIN Feng -xiang ,WANG Jian(G eo -info Science &Engineering College ,Shandong University of Science and Technology ,Q ingdao 266510,China )A bstract :The approaches producing the 3D models of building s based o n points cloud obtained from 3d laser scanner are discussed in this paper .This paper first introduces the system composition and the w orking principle of 3D laser scanner ,and then points out the procedure and methods to process the points cloud .Finally ,the method producing the 3D models of buildings is expatiated and the procedure and the result of this approach are introduced with a factual example .Key words :three dimension laser scanning surreying ;points cloud ;three dimension modeling 收稿日期:2006-12-20项目来源:国家自然科学基金资助项目(40574001);山东省教育厅科技计划资助项目(J06G07)作者简介:吴 静(1983~),女,硕士. 激光扫描技术在工业模具设计和制造方面,特别是在逆向工程中,已经有了广泛的应用。
随着激光中远程激光扫描仪的出现,激光扫描技术开始应用于测绘领域[1-4]。
与传统的高精度的点测量方式不同,三维激光扫描测量仪采用形测量方式,获取被测量目标的大量三维点,满足了高精度逆向工程对三维点的数据量的需求。
作为现代高精度传感技术,三维激光扫描测量仪可以深入到复杂的环境和现场进行扫描操作,并直接将各种大型的、复杂的、不规则实体的三维数据完整地采集到计算机中,从而快速重构出扫描物体的三维模型。
同时,它所采集的三维激光点云数据不仅包含目标的空间信息,而且记录了目标的反射强度信息和色彩灰度信息。
通过对三维点云数据的后处理,可以实现分析、量测、仿真、模拟、监测等功能。
随着信息技术的发展,数字城市的建设在全国已经形成一个势不可挡的浪潮[5]。
城市空间信息的获取成为数字城市的基础工程。
近年来三维激光扫描测量技术在空间信息获取方面迅速发展,其应用领域和范围在深度和广度上也不断扩大。
目前国内对地面三维激光扫描技术的应用多集中于文物保护领域,如秦兵马俑二号坑的三维数字建模项目[6],北京故宫太和殿的三维建模项目[7]。
对于城市建筑物的三维建模,国内研究的较少。
本文结合三维激光扫描测量仪的测量原理,介绍了对地面三维激光扫描测量仪所获得数据的处理流程,给出基于点云数据进行建筑物三维建模的方法,并以山东科技大学信息学院某大楼为例,分析和阐述了数据处理的过程及其实现。
1 三维激光扫描测量仪基本工作原理地面三维激光扫描测量系统由地面三维激光扫描测量仪、后处理软件、电源以及附属设备构成。
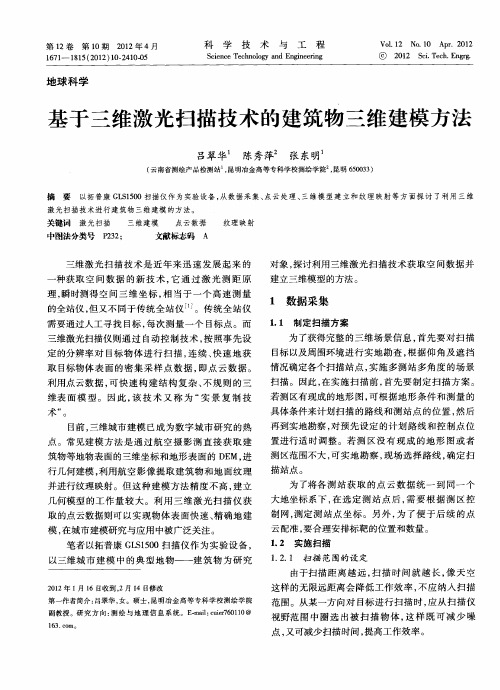
其中地面三维激光扫描测量仪主要由激光发射器、接第16卷第5期 测 绘 工 程 Vol .16№.52007年10月 ENGINEERING OF S URVEYING AND MAPPING Oct .,2007 收器、时间计数器、马达控制可旋转的滤光镜、彩色CCD 相机、控制电路板、微电脑和软件等组成。
激光脉冲发射器周期地驱动一激光二极管发射激光脉冲,然后由接收透镜接受目标表面后向反射信号,产生一接收信号,利用一稳定的石英时钟对发射与接收时间差作计数,最后由微电脑通过软件,按照算法处理原始数据,从中计算出采样点的空间距离;通过传动装置的扫描运动,完成对物体的全方位扫描;然后进行数据整理,通过一系列处理获取目标表面的点云数据[1]。
同时,彩色CCD 相机拍摄被测物体的彩色照片,记录物体的颜色信息,采用贴图技术将所摄取的物体的颜色信息匹配到各个被测点上,得到物体的彩色三维信息。
三维激光扫描测量仪原理如图1所示。
图1 三维激光扫描测量仪原理示意图2 扫描数据处理地面三维激光扫描测量仪扫描得到的数据是点云数据(Points Cloud ),记录了有限体表面上离散点的空间坐标和某些物理参量。
点的表示形式为(x ,y ,z ,intensity ,R ,G ,B ),不仅包含了点的空间位置关系,还包括点的强度信息和颜色灰度信息。
离散的点云数据并不能够真实准确地表达建筑物的整体模型,为了满足建筑物三维建模的需求,首先要对所获得的原始点云数据进行处理,包括数据配准、数据滤波和坐标系转换。
2.1 数据配准建立建筑物整体的三维模型需要获得建筑物整体的空间数据信息。
城市建筑物周围环境复杂以及建筑物自遮挡问题导致不可能在一个测站获取一栋建筑物的整体信息。
同时,根据地面三维激光扫描测量仪的仪器特性,仪器无法扫描得到建筑物表面上法向量与激光发射方向角度接近垂直的部分,建筑物表面法向变化较频繁的区域必须在扫描时多次更换视点。
因此,分块多站扫描成为获取建筑物整体空间信息的测量方法。
所获得的原始测量数据是多个不同坐标系下建筑物的分块点云集合,为了得到建筑物整体空间数据信息,需要对多个测站的数据进行数据配准。
数据配准是将两个或两个以上坐标系中的大容量三维空间数据点集转换到同一坐标系统中的数学计算过程。
业界很多学者在数据配准方面进行研究。
Besl 等提出的迭代最邻近点ICP (Iterative Closest Point )算法是基于刚性配准的经典算法[8],适用于旋转角度不大的情况下的点云数据融合。
Thom as M .对基于曲面配准方法中迭代最邻近点算法进行了详细的理论推导和分析[9]。
在逆向工程领域,J -Y Lai 等人提出了三点到三点、三球到三球、三平面到三平面的配准方法[10]。
迭代最邻近点算法要求配准点云数据有一定的重叠,同时配准前需要对点云数据进行粗校准。
当旋转角度较大时,通过最邻近点找到的对应关系存在的局限性导致最后配准的效果不够理想。
鉴于ICP 算法的局限性,采用三点到三点的配准方法,在扫描区域中设置控制点,使得相邻的点云图中至少有3个同名控制点。
通过控制点的强制符合,可以将相邻的扫描点云数据统一到同一个坐标系下。
对多个点云数据进行配准时,需要将多个点云数据中的控制点组成一个闭合环,可以有效地防止配准过程中坐标转换误差的积累。
2.2 数据滤波扫描建筑物前存在树木、路灯、行人、车辆等遮挡物,在点云数据中建筑物的表面形成空洞,造成数据缺失。
同时,建筑物表面往往存在玻璃等透明物体,激光穿过透射物体在建筑物表面也会形成冗余数据。
这些冗余数据是无效的,同时增加了计算机内存,降低数据处理效率。
需要对点云数据进行滤波,剔除冗余数据,提取建筑物表面的点云数据。
通过对点云的分割和滤波,剔除冗余数据,提取建筑物表面的数据。
图2为信息学院某大楼西侧原始扫描数据,图中圈内的部分为冗余数据,矩形框内部分为建筑物的墙面点云数据;图3为预处理后的建筑物墙面的点云数据,即图2中矩形框内的部分。
图2 信息学院某大楼西侧原始扫描数据2.3 坐标系转换点云数据中,点的空间位置信息是以扫描仪自·58·测 绘 工 程 第16卷图3 预处理后的点云数据身特定的坐标系统为基准,该坐标系统以仪器中心为原点,以仪器竖向扫描面向上的正方向为Z 轴,以仪器横向扫描面内与Z 轴垂直的方向为X 轴,以仪器横向扫描面内与X 轴垂直的方向为Y 轴,X 轴、Y 轴和Z 轴共同构成右手直角坐标系,如图4所示。
图4 点的空间坐标系物体表面点云的空间信息位于相对坐标系中。
实际应用中,通常要把相对坐标系转化为国家统一坐标系或者是地方独立坐标系。
与传统摄影测量中的小角度空间直角坐标转换模型不同,地面三维激光扫描测量仪得到的点云数据所在的三维直角坐标系与实际所采用坐标系之间的欧勒角一般较大,需要采用大旋转角的空间直角坐标转换模型。
两个空间直角坐标系的坐标变换的参数一般包括3个平移参数、3个旋转参数和1个尺度变化参数,这里两个坐标系的尺度相同,即两个空间直角坐标系之间的变化有6个独立的参数。
采用迭代法[11]来解决非线性三维基准变换,它的主要思想是将三维基准变换中的3个平移量和旋转矩阵中的9个方向余弦都设为未知量,一共12个未知量。
由于3个旋转参数是相互独立的,根据旋转矩阵的正交特性,可列出6个条件式。
采用3个公共点,可列出9个观测方程,将前面分析的6个条件式作为条件方程,按附有条件的间接平差方法求解,就可以获得12个转换参数的最小二乘解。
3 建筑物三维建模当建筑物数字化为大量离散的空间点云数据后,在此基础上来构造建筑物的三维模型。
构造方法主要有以下几种:①三角形网格蒙片法,用来满足不规则几何体的建模需求[12];②使用点云匹配算法,将分割后的点云与三维模型组件库中的组件相对应,用来满足规则几何体的建模需求[3];③提取建筑物边界点、特征线、高度等信息,为三维建模提供精确的几何信息,采用AutoCAD 或专业建模工具3DSMax 进行建模。
建模过程中,通常对这些方法综合应用,以满足具有多种几何形状的复杂的建筑物的建模需求。
4 应用实例试验采用Trimble GS200三维激光扫描测量仪对信息学院某大楼进行三维激光扫描测量,并建立了信息学院某大楼的三维模型。