不平衡故障(附定向振动) (DEMO)
- 格式:pdf
- 大小:368.21 KB
- 文档页数:16
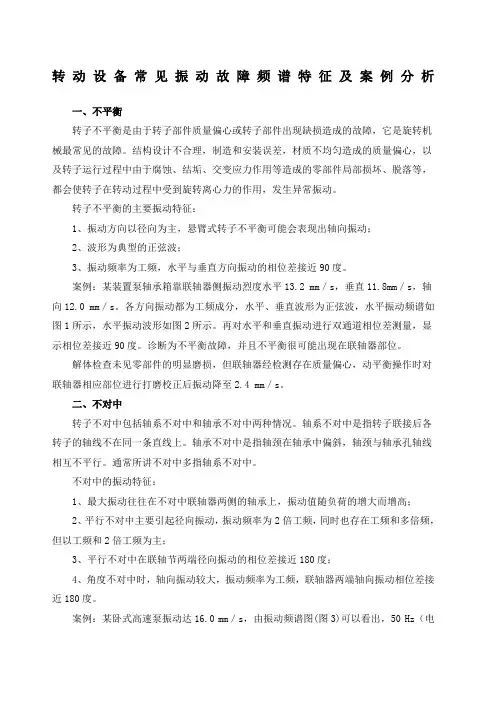
转动设备常见振动故障频谱特征及案例分析一、不平衡转子不平衡是由于转子部件质量偏心或转子部件出现缺损造成的故障,它是旋转机械最常见的故障。
结构设计不合理,制造和安装误差,材质不均匀造成的质量偏心,以及转子运行过程中由于腐蚀、结垢、交变应力作用等造成的零部件局部损坏、脱落等,都会使转子在转动过程中受到旋转离心力的作用,发生异常振动。
转子不平衡的主要振动特征:1、振动方向以径向为主,悬臂式转子不平衡可能会表现出轴向振动;2、波形为典型的正弦波;3、振动频率为工频,水平与垂直方向振动的相位差接近90度。
案例:某装置泵轴承箱靠联轴器侧振动烈度水平13.2 mm/s,垂直11.8mm/s,轴向12.0 mm/s。
各方向振动都为工频成分,水平、垂直波形为正弦波,水平振动频谱如图1所示,水平振动波形如图2所示。
再对水平和垂直振动进行双通道相位差测量,显示相位差接近90度。
诊断为不平衡故障,并且不平衡很可能出现在联轴器部位。
解体检查未见零部件的明显磨损,但联轴器经检测存在质量偏心,动平衡操作时对联轴器相应部位进行打磨校正后振动降至2.4 mm/s。
二、不对中转子不对中包括轴系不对中和轴承不对中两种情况。
轴系不对中是指转子联接后各转子的轴线不在同一条直线上。
轴承不对中是指轴颈在轴承中偏斜,轴颈与轴承孔轴线相互不平行。
通常所讲不对中多指轴系不对中。
不对中的振动特征:1、最大振动往往在不对中联轴器两侧的轴承上,振动值随负荷的增大而增高;2、平行不对中主要引起径向振动,振动频率为2倍工频,同时也存在工频和多倍频,但以工频和2倍工频为主;3、平行不对中在联轴节两端径向振动的相位差接近180度;4、角度不对中时,轴向振动较大,振动频率为工频,联轴器两端轴向振动相位差接近180度。
案例:某卧式高速泵振动达16.0 mm/s,由振动频谱图(图3)可以看出,50 Hz(电机工频)及其2倍频幅值显着,且2倍频振幅明显高于工频,初步判定为不对中故障。
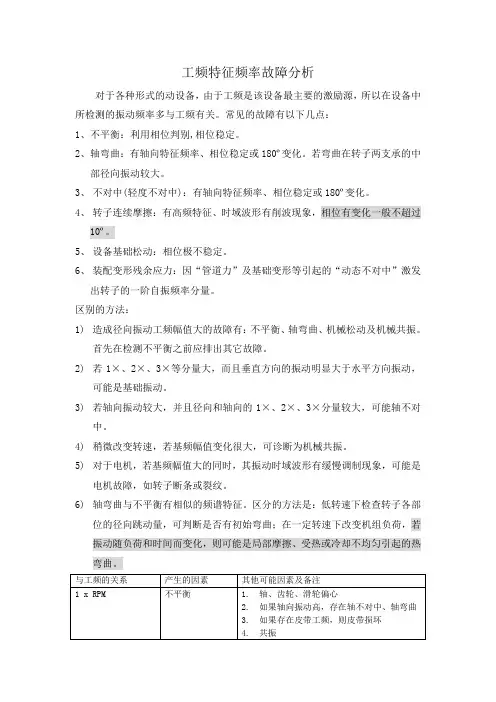
教你诊断不平衡故障不平衡故障是旋转设备最常发生的故障之一,据统计大约有50~70%的设备异常与不平衡故障有关。
如果你是从事动设备管理工作的那你对不平衡故障一定不会陌生,如果你是刚刚接触故障诊断的新人,那你遇到的第一个故障也很可能跟不平衡有关系。
1. 究竟什么是不平衡故障我们把旋转体质量沿旋转中心线的不均匀分布叫做不平衡,由此引起的机器振动或运行时产生的其他问题称为不平衡故障。
注意,不平衡是在各种旋转机械中普遍存在的,只有引起机器振动超标或者影响正常运行才称之为故障。
2. 导致旋转部件的不平衡原因都有哪些转子的结构设计不合理、机械加工质量偏差、装配误差、材质不均匀、动平衡精度差;转子部件缺损,如:运行中由于腐蚀、磨损、介质不均匀结垢、脱落;转子受疲劳应力作用造成转子的零部件(如叶轮、叶片、围带、拉筋等)局部损坏、脱落,碎块飞出等;运行中联轴器相对位置的改变;以上这些原因都有可能导致设备出现不平衡故障。
3. 不平衡故障的分类不平衡故障其实也分型,纯静不平衡时支承转子的两个轴承同一方向的振动相位是相同的。
▲纯静不平衡纯力偶不平衡时支承转子的两个轴承振动呈反相,即相位差180°。
▲力偶不平衡实际转子一般都是既存在一定的静不平衡,又存在一定的力偶不平衡(即存在动不平衡),此时支承转子的两个轴承同一方向振动相位差在0°~180°之间;悬臂转子不平衡时可能会产生很大的轴向振动。
在转子外伸端不平衡时,支承转子的两轴承的轴向振动相位相同。
▲悬臂转子不平衡4. 不平衡故障具体有哪些特征典型的不平衡故障总结起来有如下特征:①原始时域波形的形状接近一个纯正弦波;②振动信号的频谱图中,谐波能量主要是集中在转子的工作频率(1X)上,即基频振动成分所占的比例很大,而其它倍频成分所占的比例相对较小;③当工作转速一定时,振动的相位稳定;④在升降速过程中,当转速低于临界转速时,振幅随转速的增加而上升。
第三节大型旋转机组常见振动故障的机理与诊断转动设备的振动故障的类型很多,以下主要是按照石化大机组、并根据振动激励源及机组刚度来进行分类说明的。
一、不平衡转子不平衡是旋转机械最常见的振动故障,发生概率占总故障率的1/3以上。
1. 不平衡的种类转子不平衡按发生过程可分为初始不平衡、渐发性不平衡和突发性不平衡。
其中,初始不平衡是由于制造误差、装配误差、材质不均匀、动平衡不当等原因所造成的,其表现为初次开车时振动就较大;渐发性不平衡是由于介质对转子的不均匀性结垢、腐蚀、冲刷以及转子的磨损等原因所造成的,其表现为振动值随运行时间的延长而逐步缓慢参差增大;突发性不平衡是由于转子上零部件损坏后脱落或异物进入后卡死附着等原因所造成的,其表现为振动值突然显著增大后又有所降低在比原振动值高的一个新的水平上。
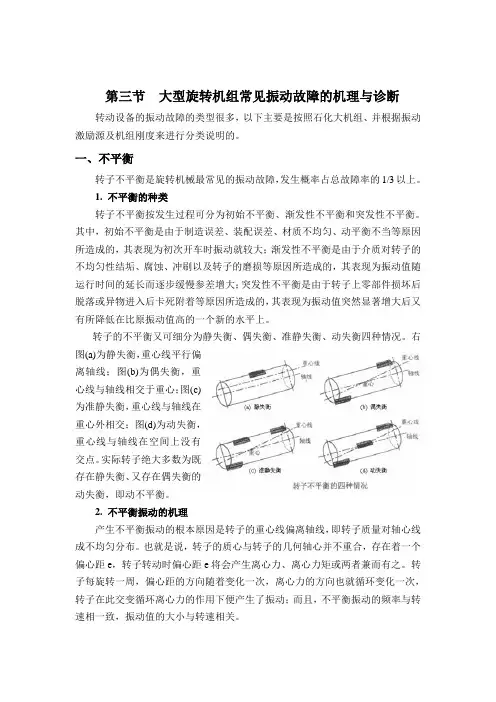
转子的不平衡又可细分为静失衡、偶失衡、准静失衡、动失衡四种情况。
右图(a)为静失衡,重心线平行偏离轴线;图(b)为偶失衡,重心线与轴线相交于重心;图(c)为准静失衡,重心线与轴线在重心外相交;图(d)为动失衡,重心线与轴线在空间上没有交点。
实际转子绝大多数为既存在静失衡、又存在偶失衡的动失衡,即动不平衡。
2. 不平衡振动的机理产生不平衡振动的根本原因是转子的重心线偏离轴线,即转子质量对轴心线成不均匀分布。
也就是说,转子的质心与转子的几何轴心并不重合,存在着一个偏心距e,转子转动时偏心距e将会产生离心力、离心力矩或两者兼而有之。
转子每旋转一周,偏心距的方向随着变化一次,离心力的方向也就循环变化一次,转子在此交变循环离心力的作用下便产生了振动;而且,不平衡振动的频率与转速相一致,振动值的大小与转速相关。
3. 不平衡故障的诊断3.1 信号特征①通频时域波形图为近似的等幅正弦波;②频谱图上,工频为主,其它频率成分相对较小;③轴心轨迹图为一个稳定的、长短轴相差不大的椭圆;④转速一定时,相位稳定;⑤全息谱图上,工频的椭圆较大、较圆,其它成分均相对较小;⑥工频趋势图上,初始不平衡时初次开车后振动值就大,渐发性不平衡时振动值逐步参差缓慢增大(其间有时可能有所降低)、相位同时产生较小的相应变化,突发性不平衡时振幅突然显著增大、相位也同时突变;⑦转子的涡动为同步正进动;⑧旋转方向上(径向)各点的振动存在有相位差;⑨支承转子的两个轴承同一方向上测点的振动相位,纯静失衡时为同相,纯偶失衡时为反相,动失衡时存在着0°~180°之间的相位差;⑩转子外伸段不平衡时会同时产生较大的轴向振动,支承转子的两轴承的轴向振动相位相同;3.2 方向性由于不平衡振动是由离心惯性力所引起的横向振动,因此径向振动大。
电机常见的振动故障原因(新版)Security technology is an industry that uses security technology to provide security services to society. Systematic design, service and management.( 安全管理 )单位:______________________姓名:______________________日期:______________________编号:AQ-SN-0578电机常见的振动故障原因(新版)一般来讲,电机振动是由于转动部分不平衡、机械故障或电磁方面的原因引起的。
一、转动部分不平衡主要是转子、耦合器、联轴器、传动轮(制动轮)不平衡引起的。
处理方法是先找好转子平衡。
如果有大型传动轮、制动轮、耦合器、联轴器,应与转子分开单独找好平衡。
再有就是转动部分机械松动造成的。
如:铁心支架松动,斜键、销钉失效松动,转子绑扎不紧都会造成转动部分不平衡。
二、机械部分故障主要有以下几点:1、联动部分轴系不对中,中心线不重合,定心不正确。
这种故障产生的原因主要是安装过程中,对中不良、安装不当造成的。
还有一种情况,就是有的联动部分中心线在冷态时是重合一致的,但运行一段时间后由于转子支点,基础等变形,中心线又被破坏,因而产生振动。
2、与电机相联的齿轮、联轴器有毛病。
这种故障主要表现为齿轮咬合不良,轮齿磨损严重,对轮润滑不良,联轴器歪斜、错位,齿式联轴器齿形、齿距不对、间隙过大或磨损严重,都会造成一定的振动。
3、电机本身结构的缺陷和安装的问题。
这种故障主要表现为轴颈椭圆,转轴弯曲,轴与轴瓦间间隙过大或过小,轴承座、基础板、地基的某部分乃至整个电机安装基础的刚度不够,电机与基础板之间固定不牢,底脚螺栓松动,轴承座与基础板之间松动等。
而轴与轴瓦间间隙过大或过小不仅可以造成振动还可使轴瓦的润滑和温度产生异常。
转子刚度不对称引起的振动
转子刚度不对称是指旋转轴截面上两个相互垂直方向具有不同的刚度。
例如、电机转子绕组不均匀,轴上有局部地方洗削成平面,轴上开有键槽,轴局部内、外园偏心,或两段轴用平面联轴节连接,而联轴节圆周上的连接螺栓拧紧度不均匀等。
对于水平安装的转子,如果刚度不对称,就会出现两倍频振动以及副临界转速(即转速在临界转速的1/2处会出现一个振动峰值)。
如果转子系统的阻尼不足,在这两个临界转速之间工作就会产生不稳定振动。
1)由刚度不对称所引起的振动频率为两倍于转子旋转频率。
2)转子振幅随截面上两个方向刚度差的增加而增大;
3)转子截面刚度差引起的振动与不平衡无关,用提高动平衡精度的方法并
不能解决此类振动问题。
如果轴在两个方向上的刚度差严重时,只要有很小的质量偏心,就足以使共振幅值变得很大。
所以对高速轴的偏心度和园度要严格控制。
燃气发电机组轴系不平衡振动分析及消除发布时间:2022-04-01T08:52:04.380Z 来源:《当代电力文化》2021年34期作者:忻雷鸣[导读] 燃机转子作为燃机电厂最主要的部件,转子不平衡是燃气机组常见的故障。
转子不平衡是由于转子系统质量分布不平衡或转子部件出现缺陷引起的故障。
轴系故障诊断主要从振动幅值、频域和时域三个方面识别机器的故障信息。
忻雷鸣中国能源建设集团科技发展有限公司发电运营公司,天津红桥区 300000摘要: 燃机转子作为燃机电厂最主要的部件,转子不平衡是燃气机组常见的故障。
转子不平衡是由于转子系统质量分布不平衡或转子部件出现缺陷引起的故障。
轴系故障诊断主要从振动幅值、频域和时域三个方面识别机器的故障信息。
现场动平衡是解决燃机转子不平衡而引发的轴系振动超标的重要措施。
现场动平衡前需要对轴系振动大的原因进行详细分析,只能针对不平衡故障才可以采用动平衡措施。
机组轴系动平衡不同于单转子的平衡,平衡方案还需要考虑某一转子上加重对相邻转子的影响,原则上应该选择可操作并且最有效的加重平面。
关键词:燃气轮机;轴系;不平衡;消除1轴系不平衡机理转子质量分布不平衡将造成转子质量偏心,这与转子的制造、装配和材质分布原因有关,又称为初始不平衡。
转子在旋转中由于腐蚀、磨损、介质结垢、零部件局部脱落或拉杆转子盘间错位等都会造成转子运行不平衡。
造成转子质量不平衡的原因虽然各不相同,但是其不平衡机理却有共同之处。
转子质量不平衡产生的离心力周期性的作用在转子上,其振动频率与转子转动频率相同,其突出表现为转频振幅大,振动高次谐波幅值低,振动时域波形接近正弦波。
当转子支撑轴承刚度各向差距不大时,在X,Y两侧的振幅接近,相位接近90度,转子轴心轨迹接近圆形,转子振动幅值在临界转速处达到最大值。
由于燃机转子质量不平衡,转子的重心与轴心会产生一个偏心距离,当转子旋转时形成周期性的离心力干扰,作用在轴承上使机器发生振动。
不平衡、不对中机械振动故障症状特征分析与解决处理方法(图文并茂详解)一、不平衡症状特征:(一)、不平衡故障症状特征:1、振动主频率等于转子转速。
2、径向振动占优势。
3、振动相位稳定。
4、振动随转速平方变化。
5、振动相位偏移方向与测量方向成正比。
(二)、力偶不平衡症状特征:1、同一轴上相位差180°。
2、存在1X转速频率而且占优势。
3、振动幅值随提高的转速的平方变化。
4、可能引起很大的轴向及径向振动幅值。
5、动平衡需要在两个修正面内修正。
(三)、悬臂转子不平衡症状特征:1、径向和轴向方向存在1X转速频率。
2、轴向方向读数同相位,但是径向方向读数可能不稳定。
3、悬臂转子经常存在力不平衡和力偶不平衡两者,所以都需要修正。
二、不对中症状特征:(一)、角向不对中症状特征:1、特征是轴向振动大;2、联轴器两侧振动相位差180°;3、典型地为1X和2X转速大的轴向振动;4、通常不是1X,2X或3X转速频率占优势;5、症状可指示联轴器故障。
(二)、平行不对中症状特征:1、大的径向方向相位差180°的振动严重不对中时,产生高次谐波频率。
2、2X转速幅值往往大于1X转速幅值,类似于角向不对中的症状。
3、联轴器的设计可能影响振动频谱形状和幅值。
(三)、装斜的滚动轴承症状特征:1、振动症状类似于角向不对中。
2、试图重新对中联轴器或动平衡转子不能解决问题。
3、产生相位偏移约180°的侧面。
4、对侧面或顶部对底部的扭动运动。
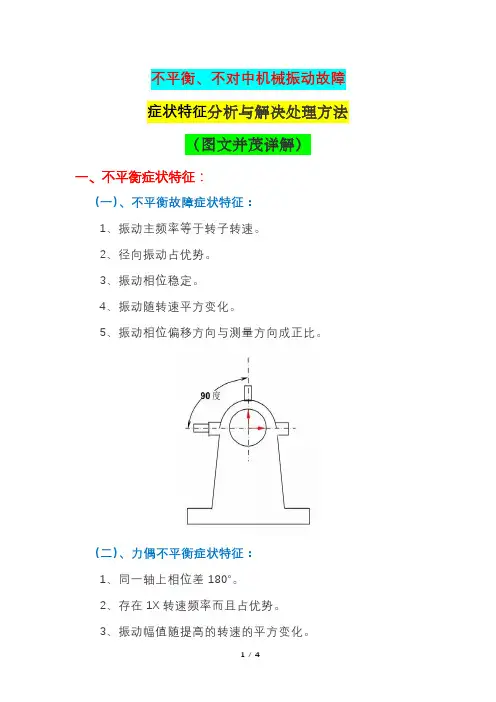
Ainte振动培训故障图例结合讲解第一节不平衡知识1、静态不平衡特征:径向1X波峰(垂直或水平方向上)Symptoms: 1X radial (V & H)如果机器失去平衡我们将得到频率等于转速的正弦时域波形,在转速频率(1X)处有一个高峰。
最简单的不平衡模型是将转动轴的重心简化到一个点。
这种不平衡称为静态不平衡,因为即使是在旋转体不旋转的情况下也能够表现出来,如果将其放在没有摩擦的轴承中间,重心位置将自动回转到最低位置。
静态不平衡将会在旋转轴的两个承载轴承上产生一个1X频率的作用力,作用于两个轴承上的作用力的方向总是相同。
从这两个轴承上采集到的振动信号同相。
原理:静态的不平衡导致转子两端的轴承在1x处出现不平衡应力,并且两端轴承上应力的方向相同,其产生的振动信号同相位。
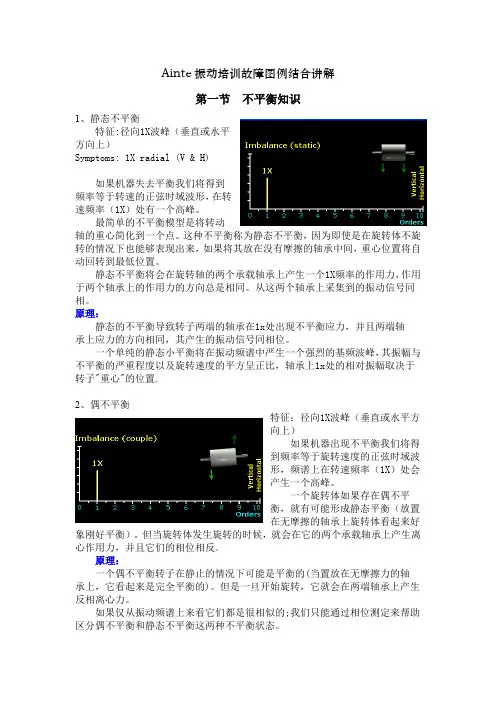
一个单纯的静态小平衡将在振动频谱中严生一个强烈的基频波峰,其振幅与不平衡的严重程度以及旋转速度的平方呈正比,轴承上1x处的相对振幅取决于转子"重心"的位置.2、偶不平衡特征:径向1X波峰(垂直或水平方向上)如果机器出现不平衡我们将得到频率等于旋转速度的正弦时域波形,频谱上在转速频率(1X)处会产生一个高峰。
一个旋转体如果存在偶不平衡,就有可能形成静态平衡(放置在无摩擦的轴承上旋转体看起来好象刚好平衡)。
但当旋转体发生旋转的时候,就会在它的两个承载轴承上产生离心作用力,并且它们的相位相反。
原理:一个偶不平衡转子在静止的情况下可能是平衡的(当置放在无摩擦力的轴承上,它看起来是完全平衡的)。
但是一旦开始旋转,它就会在两端轴承上产生反相离心力。
如果仅从振动频谱上来看它们都是很相似的;我们只能通过相位测定来帮助区分偶不平衡和静态不平衡这两种不平衡状态。
转子上可能同时存在着静态不平衡和偶不平衡,这种情况称为动态不平衡。
这是我们会在实际当中经常遇到的现象。
如果没有相关的相位信息我们将很难区分静态和动态不平衡。
对动态不平衡进行校正时,需要在多个平面上进行平衡,而从理论上讲,静态不平衡只需要添加一个平衡重就可以矫正。
转机械转子不平衡故障诊断与处理哎呀,这转机械转子不平衡故障可真让人头疼啊!你说要是这转子不平衡,那机器还能正常运转吗?肯定不能啊!那怎么办呢?别着急,我这就来给你说说怎么诊断和处理这个问题。
咱们得弄清楚什么叫转机械转子不平衡。
简单来说,就是转子的重心和旋转轴之间的距离不相等,导致转子在运转过程中产生振动和噪音。
这可不是一个小问题,如果不及时处理,可能会导致机器损坏甚至出现安全事故。
那么,如何诊断这种故障呢?其实也很简单,只要用一个叫做动平衡仪的工具就行了。
动平衡仪是一种专门用来检测物体平衡性能的仪器,它可以通过测量转子的振动情况来判断是否存在不平衡现象。
如果你没有动平衡仪,也可以用手摸一摸转子,感觉一下有没有明显的摇晃感。
不过这个方法比较费时间,而且准确性可能不如动平衡仪高。
找到问题所在之后,接下来就是处理了。
处理转机械转子不平衡的方法有很多种,这里我就给你介绍几种常见的方法吧。
第一种方法是增加转子的重量。
这种方法的原理是通过增加转子的重量,使得转子的重心下降,从而达到平衡的目的。
不过这种方法需要重新设计和制造转子,成本比较高,而且对于某些特殊场合可能不太适用。
第二种方法是减少转子的重量。
这种方法的原理是通过减轻转子的重量,使得转子的重心上升,从而达到平衡的目的。
不过这种方法同样需要重新设计和制造转子,成本也比较高。
第三种方法是给转子加装偏心块。
偏心块是一种专门用来调整转子平衡的装置,它可以在一定程度上抵消转子的不平衡力矩,从而达到平衡的目的。
这种方法操作简单,成本较低,但是对于一些高速旋转的转子可能不太适用。
第四种方法是给转子做动平衡校正。
动平衡校正是通过专业的技术和设备,对转子进行精确的平衡调整,使得转子的重心和旋转轴之间的距离达到最佳状态。
这种方法效果最好,但是成本也最高。
处理转机械转子不平衡故障需要根据具体情况选择合适的方法。
如果你对这个问题不是很了解,建议还是找专业人士来处理吧。
毕竟安全第一嘛!。
转动设备常见振动故障频谱特征及案例分析一、不平衡转子不平衡是由于转子部件质量偏心或转子部件出现缺损造成的故障,它是旋转机械最常见的故障。
结构设计不合理,制造和安装误差,材质不均匀造成的质量偏心,以及转子运行过程中由于腐蚀、结垢、交变应力作用等造成的零部件局部损坏、脱落等,都会使转子在转动过程中受到旋转离心力的作用,发生异常振动。
转子不平衡的主要振动特征:1、振动方向以径向为主,悬臂式转子不平衡可能会表现出轴向振动;2、波形为典型的正弦波;3、振动频率为工频,水平与垂直方向振动的相位差接近90度。
案例:某装置泵轴承箱靠联轴器侧振动烈度水平13.2mm/s,垂直11.8mm /s,轴向12.0mm/s。
各方向振动都为工频成分,水平、垂直波形为正弦波,水平振动频谱如图1所示,水平振动波形如图2所示。
再对水平和垂直振动进行双通道相位差测量,显示相位差接近90度。
诊断为不平衡故障,并且不平衡很可能出现在联轴器部位。
解体检查未见零部件的明显磨损,但联轴器经检测存在质量偏心,动平衡操作时对联轴器相应部位进行打磨校正后振动降至2.4mm/s。
二、不对中转子不对中包括轴系不对中和轴承不对中两种情况。
轴系不对中是指转子联接后各转子的轴线不在同一条直线上。
轴承不对中是指轴颈在轴承中偏斜,轴颈与轴承孔轴线相互不平行。
通常所讲不对中多指轴系不对中。
不对中的振动特征:1、最大振动往往在不对中联轴器两侧的轴承上,振动值随负荷的增大而增高;2、平行不对中主要引起径向振动,振动频率为2倍工频,同时也存在工频和多倍频,但以工频和2倍工频为主;3、平行不对中在联轴节两端径向振动的相位差接近180度;4、角度不对中时,轴向振动较大,振动频率为工频,联轴器两端轴向振动相位差接近180度。
案例:某卧式高速泵振动达16.0mm/s,由振动频谱图(图3)可以看出,50 Hz(电机工频)及其2倍频幅值显著,且2倍频振幅明显高于工频,初步判定为不对中故障。
案例:xxx槽上供矿皮带的电机1x故障分析处理
日期:2018年12月12日
2018年5月,某钢铁厂发现槽上供矿皮带的电机振动异常报警,查看系统振动值异常大,复核现场排除线路和传感器安装松动情况。
设备基本信息资料如下:
电机铭牌:电机型号:YXKK450-4 工作额定转速:1491r/min 额定功率355KW
振动趋势:
振动谱频率,就是25Hz 的1x 倍频,没有其他成分
冲击脉冲趋势:
冲击脉冲趋势很稳定,8月分后,可以看到中早期的BSF 滚动体征兆,但肯定不是造成振动大的原因 分析处理:拿测振仪器,去现场把地脚、底座的振动情况都确认了一遍,基本确定是结构型松动,电机安装位置的水泥地板基础刚性不足。
处理意见:建议是把基础重新灌浆浇筑才是根本解决问题的方法。
但因为项目刚验收,业主不可能停机大动作(整治意义)。
那就建议,半天来紧紧螺栓吧…如果紧螺栓后,振动再上升就需要做基础了。
叮嘱了一下不用换轴承,不用做动平衡,也不需要换电机。
(去做分析前,业主已经讨论准备换电机,做动平衡了。
)
振动波动很大
再后续的处理和追踪
•9月27日,休风,现场二次浇筑,板筋焊接加强
现场处理的照片:
处理后振动趋势:振动恢复正常,只有
1.2mm/s 保养维护,紧固螺栓休风,二次浇筑
浇筑前 浇筑后。
转子组件振动原因的识别(振动形态分析)一、按转子振动形态分类用振动诊断转轴组件的故障是基于对各类激振频率的识别。
在转轴组件中,一般有两类激振原因:一类是由缺陷(包括磨损)引起的,另一类是由结构引起的。
分析各类激振频率,是振动监测的方法的基础。
但是,有时同一激振频率的出现,可能在不同场合下是由不同的激振原因所产生,这时为了识别起见就需要进一步分析振动的形态。
1、缺陷:1)失衡2)转子弯曲和转子零件失落3)对中不良4)基座扭曲5)装配件松动2、结构1)齿轮啮合2)齿轮联轴器3)轴承油膜涡动4)轴承油膜震荡5)电源激励6)压力脉动7)风扇和叶轮二、按转子振动的频率分类按转子振动的频率高低可把转子振动分为同步振动与异步振动。
同步振动是振动频率与转子转速频率相同,异步振动是振动频率与转子频率不一致。
异步振动又分别为超异步振动和亚异步振动两种,超异步振动的振动频率大于转子的转速频率,亚异步振动的振动频率小于转子的转速频率。
三、按转子振动的激振力分类由引起转子产生振动的激振力可分为强迫振动和自激振动。
转子强迫振动的激振力有转子不平衡、离心力和流体激振力等。
转子自激振动的激振力有油膜对轴产生的作用力,密封产生的流体动力等。
强迫振动的激振力和自激振动的激振力的区别:强迫振动的激振力的大小与轴的位移无关。
例如:不平衡离心力的大小仅与转子的重心偏移和转速有关;而自激振动的激振力的大小与位移有关并构成F = f (x,y)函数关系,位移越大,这种自激力也越大。
四、典型故障分类1、转子初始不平衡,转子永久弓形或转子碎块(叶片)飞出,转子临时呈弓形。
2、箱体变形(应力)、基础变形(应力)、密封碰摩、转子轴向碰摩、不对中、管道力。
3、轴颈使轴承偏心、轴承损坏、轴承和支座受激振动;轴承水平、垂直方向刚度不相等,推力轴承损坏。
4、螺栓松动,叶轮联接毂盘和轴承装配过盈不足,轴承红套过盈不足,轴承和衬瓦之间过盈不足,轴承与箱体之间过盈不足,箱体与支座之间过盈不足。
不平衡机械故障诊断简单分析摘要:振动在所有的机械设备中普遍的存在,有的振动信号是设备正常运行的的表现,有的是存在设备故障时的发出的噪音。
因此以振动信号来研究旋转机械的故障是一常见的方法。
本文以振动入手,简述旋转机械的简单故障诊断。
关键词:振动方法案例分析Abstract: vibration in all mechanical equipment in the universal existence, some vibration signal is the normal operation of the equipment performance, some equipment failure of noise. So it is a common method to study the fault of rotating machinery by using vibration signal. In this paper, the simple fault diagnosis of rotating machinery is briefly introduced in this paper.Key words: Vibration method case analysis1前言:旋转机械被广泛地应用于压缩机、风机、汽轮机、涡轮机、发电机、燃气轮机、航空发动机及各种电动机等机械装置中。
由于旋转机械子系统的复杂性、支承条件的特殊性和存在多种非线性因素影响, 因而在工作中经常会产各种故障, 如果不能及时发现和处理, 会使机械设备可靠性降低、失去生产功能, 造成数百万、千万的经济损失, 甚至会导致机毁人亡的重大事故。
2诊断方法:振动检测诊断法[1]设备的零部件、整机都有不同程度的振动, 机械设备的振动往往会影响其工作精度, 加剧设备的磨损, 加速疲劳破坏; 而随着磨损的增加和疲劳损伤的加重, 机械设备的振动将更加剧烈, 如此恶性循环, 直至设备发生故障、破坏。
不平衡故障一、 不平衡故障的产生机理 由于设计、制造、安装中转子材质不均匀、结构不对称、加工和装配误差等原因或由于机器运行时结垢、热弯曲、零部件脱落、电磁干扰力等原因而产生质量偏心。
转子旋转时,由于转子质量中心偏离转动中心,将激起转子的振动,这是旋转机械最常见的故障。
由于有偏心质量m 和偏心距e 的存在,当转子转动时将产生离心力、离心力矩或两者兼而有之。
离心力的大小与偏心质量m 、偏心距e 及旋转角速度ω有关,即2ωme F =。
众所周知,交变的力(方向、大小均周期性变化)会引起振动,这就是不平衡引起振动的原因。
转子每转动一周,离心力方向变化一周,因此不平衡振动的频率与转速相一致。
不平衡故障的主要振动特征:1) 振动的时域波形近似为正弦波;2) 频谱图中,谐波能量集中于基频。
并且会出现较小的高次谐波,使整个频谱呈所谓的“枞树形”;3) 当ω<n ω时,即在临界转速以下,振幅随着转速的增加而增大;当ω>n ω后,即在临界转速以上,转速增加时振幅趋于一个较小的稳定值;当ω接近于n ω时,即转速接近临界转速时,发生共振,振幅具有最大峰值。
振动幅值对转速的变化很敏感。
4) 当工作转速一定时,相位稳定。
5) 转子的轴心轨迹为椭圆。
(由于支撑刚度不同的影响)6) 从轴心轨迹观察其进动特征为同步正进动。
对于原始不平衡、渐变不平衡和突发性不平衡这三种形式,其共同点较多,但可以从以下两个方面对其进行甄别。
1)振动趋势不同原始不平衡:在运行初期机组的振动就处于较高的水平。
渐变不平衡:运行初期机组振动较低,随着时间的推移,振值逐步升高。
突发不平衡:振动值突然升高,然后稳定在一个较高的水平;2)矢量域变化不同原始不平衡:矢量域稳定于某一允许的范围。
渐变不平衡:矢量域逐渐变化;突发性不平衡:矢量域某一时刻发生突变,然后稳定。
2.转子不平衡可能导致的后果对于柔性转子还可能由于动挠度产生附加的惯性离心力而造成不平衡。
不同原因所引起的转子不平衡故障是具有基本上一致的规律。
归结起来,转子不平衡可能会导致下列不良后果;(1)造成转子的反复弯曲和内应力,从而引起转子疲劳,甚至引起转子断裂;(2)使机器在运转过程中产生过度振动和噪声,从而会加速轴承等零件的磨损及缩短使用寿命。
(3)转子的振动会通过轴承、机座等传递到基础和建筑物上,从而导致工作环境恶化。
二、 不平衡振动的特征转子的质量不平衡所产生的离心力2ωme F =始终作用在转子上,它相对于转子是静止的,其振动频率就是转子的转速频率,也称为工频。
在频谱分析时,首先要找的就是工频成分。
其特征有:a) 对于刚性转子(转速小于临界转速),不平衡产生的离心力与转速的平方成正比,因此测得的振动幅值随转速增加而加大;而在轴承座测得的振动转速增加而加大,但不一定与转速的平方成正比,这是由于轴承与转子之间的非线性所致。
b) 对于柔性转子(转速大于临界转速),当转子的转速大于转子的临界转速后,转子转速增加,振幅趋于一个较小的稳定值;当转子转速接近临界转速时机器发生共振,振幅具有最大峰值。
相位在临界转速前后相差近180° ;c) 振动频率和转速频率一致,转速频率的高次谐波幅值很低,在时域上波形接近于一个正弦波。
d) 由于通常轴承水平方向的刚度较小,振动幅值较大,使轴心轨迹成为椭圆形。
e) 振动频率为转子工频;振动主导方向为径向;相位稳定,振动相位垂直与水平方向的差为90°。
f) 除了悬臂转子之外,对于普通两端支承的转子,轴向测点上的振值一般并不明显。
三、不平衡振动的原因:a) 固有不平衡由于各转子残余不平衡的累积、材质不良、安装不当等原因,即使机组在制造过程中已对各个转子作了动平衡,但是连接起来的转子系统还是存在固有不平衡。
为消除质量不平衡产生的振动,应在平衡机或现场作静平衡和动平衡,加以校正。
转子弯曲在旋转机械中,轴弯曲是造成转子不平衡的主要原因,也是一些机组产生异常振动的重要原因。
而造成转子的轴弯曲的原因又是多方面的,如制造上的误差;重力下垂;安装误差;热变形、摩擦生热等。
转子的弯曲有初始弯曲与热弯曲之分转子的初始弯曲是由于加工不良、残余应力或碰撞等原因引起的,将引起转子系统工频振动,通过振动测量并不能把其与转子的质量不平衡区分开来。
而应在低速转动下检查转子各部位的径向跳动量予以判断。
当转子弯曲不严重时也可以用平衡方法加以校正;当弯曲严重时,必须进行校正。
初始弯曲转子的振动特征:轴弯曲转子与质量偏心转子的振动特性基本相似,但也有差别,可归纳为如下几点特征: 1)初始弯曲转子的动力响应幅频特性与偏心转子的动力响应幅频特性相似;(见图示)(与上述不同点,可能指转子弯曲,2)初始弯曲转子的总位移振动幅频特性与偏心转子的不同;质心偏离转子旋转中心的距离成正比,而质量偏心主要与角速度的平方成正比)3)初始弯曲转子的轴振动相位随转速的变化与质量偏心转子是一致的;4)初始弯曲转子与质量偏心转子在动力响应相频特性方面是有区别的;(在转速等于转子的临界转速时,质量不平衡会引起相位的突变)转子热弯曲产生机理:由于转子与静子(如密封处)的发生间歇性局部接触,产生磨擦热引起的转子的临时性弯曲;或转子不均匀受热或冷却引起转子的临时性弯曲。
其特点是转子的振动随时间负荷的变化而在大小和相位上均有改变。
因此,可通过变负荷或一段时间的振动监测判断转子热弯曲故障。
防止热弯曲一方面要减小使转子不均匀受热的影响因素,如启停机时充分暖机,保证机组均匀膨胀;另一方面应注意装配间隙,各组件要有相近的热膨胀系数。
(设计上应注意的问题),c) 转子部件脱落当旋转转子上部件突然脱落时,使转子产生阶跃性的不平衡变化,其表现形式也是每转一次的振动成分,使机组振动加剧。
但由于转子部件脱落不平衡矢量与原始转子不平衡矢量的叠加,使合成的不平衡矢量在大小、相位和位置三方面均与原始转子不平衡矢量发生了变化,因此,可通过测量相位进一步诊断。
d)联轴节精度不良联轴节精度不良在对中时产生的端面偏摆和径向偏摆,相当于给转子施加一个初始不平衡量,使转子振动增大。
这时可能会出现二倍转速频率的振动频谱图上有明显的二次谐波谱值。
(注:在转子上某一固定位置作上标记,并贴上反光条,可对质心的矢量域的变化进行监测。
)四、静态应力(相位)突变现象由于转子质量偏心,旋转轴在旋转时将产生横向弯曲弓状回转运动,则轴的表面产生拉或压静态应力。
在通过临界转速前后,静应力将产生突变。
亚临界时A点为拉应力,B点为压应力,临界时A和B点均为零应力;超临界时A点为压应力,B点为拉应力,即通过临界转速时轴表面静态应力出现突变,突变时间往往不超过一秒,与理论一致。
当轴的进动(公转)速度与自转速度大小相等,方向相同即正协调进动时,定义为转轴的临界转速。
1)对于刚性转子,不平衡产生的离心力与转速的平方成正比,而在轴承座测得的振动随转速增加而加大,但不一定与转速的平方成正比,这是由于轴承与转子之间的非线性所致。
2)在临界转速附近,振幅会出现一个峰值,且相位在临界转速前后相差近180°。
3)振动频率和转速频率一致,转速频率的高次谐波幅值很低,在时域上波形接近于一个正弦波。
五、不平衡的轴心轨迹特点单一的质量不平衡在水平和垂直方向上刚度相同,则在离心力作用下,转子运动轴心轨迹趋近于一个园,刚度不同轴心轨迹为一椭圆,也就是说,不平衡引起的旋转离心力将在水平和垂直方向上产生90°上下与椭圆度相对应的相位差。
但是当出现机体变形,机座松动、结构薄弱等故障时,虽然也以工频为主,然而在振动方向上并不一定按照旋转力的变化,而可能在水平和垂直方向上出现同相或接近180°反相的振动,称为定向振动。
表现在轴心轨迹上是一条倾斜的直线或接近一条直线形状。
(连续的摩擦由于摩擦副的位置基本固定,所以受力方向也不会发生大的变化,所以水平方向与垂直方向的相位应基本不变,应属于定向振动的范畴。
而间断性的摩擦振动大小和方向时时都在改变所以相位极其不稳定。
)六、不平衡的类型由于不平衡的产生的原因不尽相同,不平衡的类型和不平衡的位置不同。
所以各种不平衡的特征也有所差别,具体的分类如下:✧偶不平衡1.轴的两端相位差为180°;2.1X RPM总是占主导位置;3.振幅的变化与速度平方成正比;4.同样也会引起轴向振动;5.平衡需要在180°的两个平面进行。
✧悬臂转子不平衡1.在轴向和径向均会产生1X RPM振动;2.相位轴向数值稳定而径向不稳定;3.悬臂转子存在静不平衡和偶不平衡,需要同时消除两种不平衡的方法方能解决。
Overhung rotors often have both force and couple unbalance each of which may require correction9090转子不平衡故障特征:其它原因:1、轴发生弯曲变形;2、转子飞缺一块;3、转子之间缺乏同心度(连接不对中);4、固体物料的沉积或冲刷;5、转子工作转速接近临界转速;6、支承系统或基础共振等;七、类似于不平衡振动的其它故障鉴别:1.如果测得的轴向振动大,则可能的故障原因是:联轴节不对中,轴承不对中,轴弯曲,轴向共振或悬臂转子存在不平衡等。
还有一些机械故障,如:机体变形、机座松动、结构薄弱、转子上零件偏心(连续的偏磨)、往复力作用以及基础共振等也会在径向方向上显示出较大的转速频率;2.若基频幅值增大的同时,频域中有“拍振”出现,其时域波形有缓慢调制现象,对于电机可能是电机故障,如电机转子条断条或裂纹;皮带传动设备可能存在皮带张力不够或不均现象。
其它机械因素,如轴承发生变形(轴承通过频率并伴有工频)。
3.如果转速的少量变化引起1×RPM成分剧烈的变化,则怀疑有共振发生。
4.若振动随负荷和时间而变化,则可能是局部摩擦、受热或冷却不均匀引起的热弯曲。
5.转子与静子发生连续的摩擦也会产生1×RPM,往往现象与不平衡类似。
定向振动现象分析:1)机壳变形:某些机器由于底脚刚度不足,在管道应力作用下将引起机器的安装位置变形,也会出现类似定向振动问题,如:底脚刚性不足(螺栓松动)、底脚对角线摆振。
2)皮带轮偏心:类似于皮带轮、滑轮和齿轮等偏心问题,均可引起很高的定向激振力,这类问题很容易和不平衡故障相混淆,进行水平和垂直方向的相位比较,有助于把两者区分开来。
3)支承部分松动:主导频率为工频,在水平和垂直方向上的相位进行分析,相位为同向相或反相。
4)基础共振:特点为工频,定向振动。
1.不平衡的原因经验表明,转子系统的不平衡是其最主要的故障形式,约占转子系统故障的30%。
转子不平衡的特点在于一个部件.围绕着它的旋转中心线存在着不均匀的重量分布。