第四章 转动参考系
- 格式:ppt
- 大小:1.45 MB
- 文档页数:25
球坐标系中速度与加速度的转动参考系求法全球坐标系中速度与加速度的转动参考系是一种求解物体在三维空间中运动轨迹的几何方法。
具体而言,首先将物体处在全球坐标系(GCS)内,然后将物体相对于GCS连续旋转一定角度所产生的新参考系称为转动参考系(R),再将物体在R中的速度(V)与加速度(A)从R转换到GCS的运算模型即为所求转动参考系求法。
首先,通过计算可以求出物体在R中的速度和加速度,分别用v_r和a_r表示:v_r=(v^r_x,v^r_y,v^r_z)a_r=(a^r_x,a^r_y,a^r_z)其中v^r_x=v_x·cosα+v_y·sinαv^r_y=-v_x·sinα+v_y·cosαv^r_z=v_za^r_x=a_x·cosα+a_y·sinαa^r_y=-a_x·sinα+a_y·cosαa^r_z=a_z其中α为物体从GCS轨迹向R坐标系引入时需要旋转的角度。
接着,可以用下面的公式从R参考系转换至GCS:v_x=v^r_x·cosα-v^r_y·sinαv_y=v^r_x·sinα+v^r_y·cosαv_z=v^r_za_x=a^r_x·cosα-a^r_y·sinαa_y=a^r_x·sinα+a^r_y·cosαa_z=a^r_z最后,我们可以得到物体在GCS中的速度和加速度,分别用v_x,v_y,v_z表示:v:(v_x,v_y,v_z)a:(a_x,a_y,a_z)通过以上步骤,我们就可以用全球坐标系中速度与加速度的转动参考系求法来解决物体在三维空间中运动轨迹问题。
此法可有效求解物体在GCS中的三维运动轨迹,且操作简单、效率高。
第四章 转动参考系第四章思考题4.1为什么在以角速度ω转动的参照系中,一个矢量G 的绝对变化率应当写作G ωG G ⨯+=*dt d dt d ?在什么情况下0=*dtd G?在什么情况下0=⨯G ω?又在什么情况下0=dtd G? 4.2式(4.1.2)和式(4.2.3)都是求单位矢量i 、j 、k 对时间t 的微商,它们有何区别?你能否由式(4.2.3)推出式(4.1.2)?4.3在卫星式宇宙飞船中,宇航员发现自己身轻如燕,这是什么缘故? 4.4惯性离心力和离心力有哪些不同的地方?4.5圆盘以匀角速度ω绕竖直轴转动。
离盘心为r 的地方安装着一根竖直管,管中有一物体沿管下落,问此物体受到哪些惯性力的作用?4.6对于单线铁路来讲,两条铁轨磨损的程度有无不同?为什么?4.7自赤道沿水平方向朝北或朝南射出的炮弹,落地是否发生东西偏差?如以仰角 40朝北射出,或垂直向上射出,则又如何?4.8在南半球,傅科摆的振动面,沿什么方向旋转?如把它安装在赤道上某处,它旋转的周期是多大?4.9在上一章刚体运动学中,我们也常采用动坐标系,但为什么不出现科里奥利加速度?第四章思考题解答4.1.答:矢量G 的绝对变化率即为相对于静止参考系的变化率。
从静止参考系观察变矢量G 随转动系以角速度ω相对与静止系转动的同时G 本身又相对于动系运动,所以矢量G 的绝对变化率应当写作G ωG G ⨯+=*dt d dt d 。
其中dtd G *是G 相对于转动参考系的变化率即相对变化率;G ω⨯是G 随动系转动引起G 的变化率即牵连变化率。
若G 相对于参考系不变化,则有0=*dt d G ,此时牵连运动就是绝对运动,G ωG ⨯=dt d ;若0=ω即动系作动平动或瞬时平动,则有0=⨯G ω此时相对运动即为绝对运动 dtd dt d G G *=;另外,当某瞬时G ω//,则0=⨯G ω,此时瞬时转轴与G 平行,此时动系的转动不引起G 的改变。

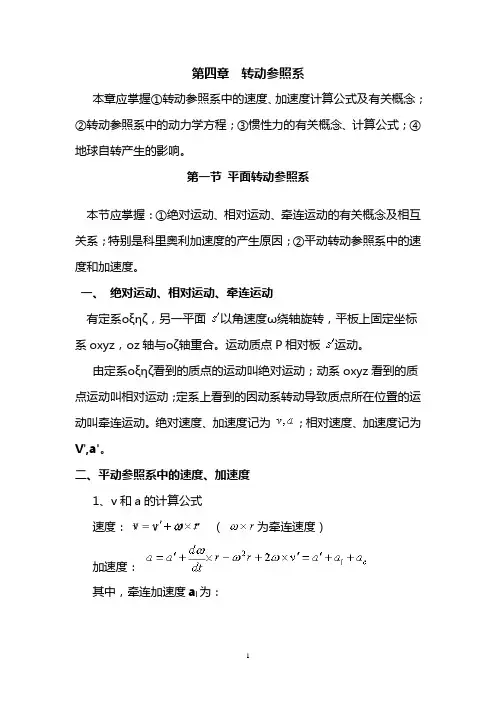
第四章转动参照系本章应掌握①转动参照系中的速度、加速度计算公式及有关概念;②转动参照系中的动力学方程;③惯性力的有关概念、计算公式;④地球自转产生的影响。
第一节平面转动参照系本节应掌握:①绝对运动、相对运动、牵连运动的有关概念及相互关系;特别是科里奥利加速度的产生原因;②平动转动参照系中的速度和加速度。
一、绝对运动、相对运动、牵连运动有定系οξηζ,另一平面以角速度ω绕轴旋转,平板上固定坐标系oxyz,oz轴与οζ轴重合。
运动质点P相对板运动。
由定系οξηζ看到的质点的运动叫绝对运动;动系oxyz看到的质点运动叫相对运动;定系上看到的因动系转动导致质点所在位置的运动叫牵连运动。
绝对速度、加速度记为;相对速度、加速度记为V',a'。
二、平动参照系中的速度、加速度1、v和a的计算公式速度:(为牵连速度)加速度:其中,牵连加速度a l为:(转动加速度+向心加速度)科里奥利加速度:2、科里奥利加速度a c①它产生条件是:动系对定系有转动;质点相对动系的运动速度不为零,而且运动方向与转轴方向不平行。
②它产生原因是:科氏加速度的产生在于牵连运动与相对运动的相互影响:从静止系看来,一方面牵连运动使相对速度发生改变,另一方面,相对运动也使牵连速度中的发生改变,两者各贡献,结果科氏加速度为。
三、平面转动参照系问题解答例关键是分清定系,动系和运动物体;然后适当选取坐标系,按公式计算。
[例1]P263 4.1题等腰直角三角形OAB,以匀角速ω绕点O转动,质点P以相对速度沿AB边运动。
三角形转一周时,P点走过AB。
求P质点在A 点之速度、加速度(已知AB=b)解:(1)相对动系(直角三角形)的速度v r=b/T=b/(2π/ω)=bω/2π(方向)A点的牵连速度(方向垂直)由V=V r+V e,利用矢量合成法则,得到(2)加速度,因匀速,所以相对加速度α'=0 又匀角速转动,所以角加速牵连加速度,大小,方向沿科氏加速度注意到,所以其大小方向与AB边垂直(见图4.1.1)由,利用矢量合成法则则得到:与斜边的夹角第二节空间转动参照系本节要求:①掌握空间转动参照系中绝对、相对、牵连变化率等概念;②掌握空间转动参照系中的速度V、加速度a的计算公式。

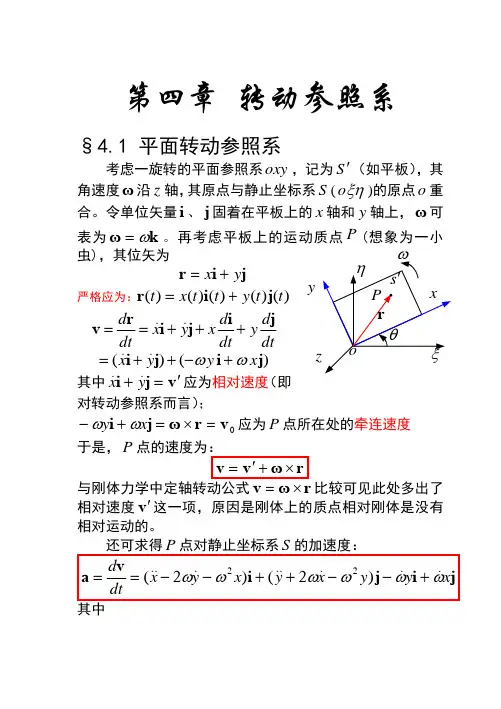
第四章 转动参照系 §4.1 平面转动参照系考虑一旋转的平面参照系oxy ,记为S ′(如平板),其角速度ω沿轴,其原点与静止坐标系(z S ξηo )的原点重合。
令单位矢量、固着在平板上的o i j x 轴和轴上,ω可表为y k ωω=。
再考虑平板上的运动质点P (想象为一小虫),其位矢为j i r y x += 严格应为:)()()()()(t t y t t x t j i r +=d d d x y x y dt dt dt ==+++r i j v i j ) ()(xy y x ωω=++−+i j i j 其中v j i ′=+y x 应为相对速度(即对转动参照系而言);0v r ωj i =×=+−x y ωω应为点所在处的牵连速度 P 于是,点的速度为:P r ωv v ×+′=与刚体力学中定轴转动公式r ωv ×=比较可见此处多出了相对速度这一项,原因是刚体上的质点相对刚体是没有相对运动的。
v ′ya j i ′=+yx 为相对加速度; r j i 222ωωω−=−−y x 为平板转动引起的向心加速度;(方向由点指向o 点)P r ωj i ×=+− x y ωω为平板作变角速转动引起的切向加速度(方向与r 垂直,在平板上。
匀速转动时为0);向心加速度 + 切向加速度 = 牵连加速度;(用表示)t a v ωj i ′×=+−222x yωω为科里奥利加速度。
(用表示)c a 故上式又可写成v ωr r ωa a ′×+−×+′=22ω 或简写为t c ′=++a a a a与平动情况相比,不仅牵连加速度项不同,这里还多了一项,这是转动参照系所特有的。
c a 必须明确两点:1. 平面转动参照系是非惯性系。
这是因为对固结在平面上的点来说,0,0′′≡=v a 。
这时,质点的加速度就等于牵连加速度,所以是非惯性系。
第四章 转动参考系第四章思考题4.1为什么在以角速度ω转动的参照系中,一个矢量G 的绝对变化率应当写作G ωG G ⨯+=*dt d dt d ?在什么情况下0=*dtd G ?在什么情况下0=⨯G ω?又在什么情况下0=dtd G ? 4.2式(4.1.2)和式(4.2.3)都是求单位矢量i 、j 、k 对时间t 的微商,它们有何区别?你能否由式(4.2.3)推出式(4.1.2)?4.3在卫星式宇宙飞船中,宇航员发现自己身轻如燕,这是什么缘故?4.4惯性离心力和离心力有哪些不同的地方?4.5圆盘以匀角速度ω绕竖直轴转动。
离盘心为r 的地方安装着一根竖直管,管中有一物体沿管下落,问此物体受到哪些惯性力的作用?4.6对于单线铁路来讲,两条铁轨磨损的程度有无不同?为什么?4.7自赤道沿水平方向朝北或朝南射出的炮弹,落地是否发生东西偏差?如以仰角ο40朝北射出,或垂直向上射出,则又如何?4.8在南半球,傅科摆的振动面,沿什么方向旋转?如把它安装在赤道上某处,它旋转的周期是多大?4.9在上一章刚体运动学中,我们也常采用动坐标系,但为什么不出现科里奥利加速度?第四章思考题解答4.1.答:矢量G 的绝对变化率即为相对于静止参考系的变化率。
从静止参考系观察变矢量G 随转动系以角速度ω相对与静止系转动的同时G 本身又相对于动系运动,所以矢量G 的绝对变化率应当写作G ωG G ⨯+=*dt d dt d 。
其中dtd G *是G 相对于转动参考系的变化率即相对变化率;G ω⨯是G 随动系转动引起G 的变化率即牵连变化率。
若G 相对于参考系不变化,则有0=*dtd G ,此时牵连运动就是绝对运动,G ωG ⨯=dt d ;若0=ω即动系作动平动或瞬时平动,则有0=⨯G ω此时相对运动即为绝对运动 dtd dt d G G *=;另外,当某瞬时G ω//,则0=⨯G ω,此时瞬时转轴与G 平行,此时动系的转动不引起G 的改变。
第五章 刚体的转动5-13 如图5-13(a)所示,滑轮转动惯量为0.012m kg ⋅,半径为7 cm ,物体质量为5 kg ,由一绳与倔强系数k=200 N/m 的弹簧相连,若绳与滑轮间无相对滑动,滑轮轴上的摩擦忽略不计,求:(1)当绳拉直弹簧无伸长时,使物体由静止而下落的最大距离;(2)物体速度达最大值的位置及最大速率.分析 下面的5-17题中将证明,如果绕定轴转动的刚体除受到轴的支承力外仅受重力作用,则由刚体和地球组成的系统机械能守恒.如果将滑轮、地球和物体与弹簧组成一个弹性系统和重力系统合成的系统,当无重力和弹性力以外的力作功的情况下,整个系统的机械能守恒,可以应用机械能守恒定律.下面的解则仅应用功能原理和力矩所作的功与刚体转动动能的关系进行计算.解 (1) 物体由静止而下落到最低点时,速度为零,位移为1x ,在此期间重力所作的功完全转换为弹簧弹性势能的增量,即21121kx mgx = m 0.49m 2008.95221=⨯⨯==k mg x (2)物体与滑轮受力如图5-13(b)所示,设物体的最大速率为0v ,此时的位移为0x ,加速度00=a ,滑轮的角加速度000==R a α,分别应用牛顿第二定律和转动定律T1aF ’T1m m g(a) (b)图5-13ma F mg =-T1αJ R F F =-)(T2T1可得此时T1F mg =,F T1= F T2,又因对于轻弹簧有0T2kx F =,则得m 0.245m 2008.950=⨯==k mg x 在此过程中,重力所作之功等于弹性势能的增量、物体动能和滑轮转动动能的增量的和,即2020200212121ωJ m kx mgx ++=v 因R00v =ω,得 m/s 31.1m/s 9.85)07.001.05(2001)(122=⨯⨯+⨯=+=mg R J m k v5-7 如图5-7(a )所示的系统中,m 1 = 50 kg ,m 2 = 40 kg ,圆盘形滑轮质量m = 16 kg ,半径R = 0.1 m ,若斜面是光滑的,倾角为30°,绳与滑轮间无相对滑动,不计滑轮轴上的摩擦,(1)求绳中张力;(2)运动开始时,m 1距地面高度为1 m ,需多少时间m 1到达地面?分析 由于存在物体运动和滑轮定轴转动,而且必须考虑圆盘形滑轮的质量,这是一个质点动力学和刚体动力学的综合问题,应该采用隔离物体法,分别m αF ’T1 F T1 m 2 m 1 F F T2a︒30m 2g m 1g(a ) (b )图5-7对运动物体作受力分析,对转动的滑轮作所受力矩的分析,然后分别应用牛顿第二定律和转动定律.解 (1)各物体与滑轮受力情况如图5-7(b )所示,其中F T1= F ’T1,F T2= F ’T2,轴对滑轮的支承力F N 不产生力矩,选取物体运动方向为坐标轴正向,分别应用牛顿第二定律和转动定律,可得22121rad/s 3021)(30sin =++︒-=g mR R m m m m α N 340)(1T1=-=αR g m FN 316)30sin (2T2=+︒=αR g m F2m/s 3==αR a(2) m 1到达地面的时间为s 0.816s 3122=⨯==a h t 、5-1 一个匀质圆盘由静止开始以恒定角加速度绕过中心而垂直于盘面的定轴转动.在某一时刻,转速为10 r/s ,再转60转后,转速变为15 r/s ,试计算:(1)角加速度;(2)由静止达到10 r/s 所需时间;(3)由静止到10 r/s 时圆盘所转的圈数.分析 绕定轴转动的刚体中所有质点都绕轴线作圆周运动,并具有相同的角位移、角速度和角加速度,因此描述运动状态的物理量与作圆周运动的质点的相似.当角加速度恒定时,绕定轴转动的刚体用角量表示的运动学公式与匀加速直线运动的公式类似.解 (1) 根据题意,转速由rad/s 1021⨯=πω变为rad/s 1522⨯=πω期间的角位移rad 260πθ⨯=,则角加速度为22222122rad/s 54.6rad/s 2602)102()152(2=⨯⨯⨯-⨯=-=πππθωωα (2) 从静止到转速为rad/s 1021⨯=πω所需时间为s 9.61s 54.61021=⨯==παωt (3) t 时间内转的圈数为48261.91022122121=⨯⨯⨯===ππωππθt N 5-2 唱片在转盘上匀速转动,转速为78 r/min ,由开始到结束唱针距转轴分别为15 cm 和7.5 cm ,(1)求这两处的线速度和法向加速度;(2)在电动机断电以后,转盘在15 s 内停止转动,求它的角加速度及转过的圈数.分析 绕定轴转动的刚体中所有质点具有相同的角位移、角速度和角加速度,但是线速度、切向加速度和法向加速度等线量则与各质点到转轴的距离有关.角量与线量的关系与质点圆周运动的相似.解 (1) 转盘角速度为rad/s 8.17rad/s 60278=⨯=πω,唱片上m 15.01=r 和m 075.02=r 处的线速度和法向加速度分别为m/s 1.23m/s 15.017.811=⨯==r ωv222121n m/s 10.0m/s 15.017.8=⨯==r ωam/s .6130m/s 075.017.822=⨯==r ωv222222n m/s .015m/s 075.017.8=⨯==r ωa(2) 电动机断电后,角加速度为22rad/s 545.0rad/s 1517.800-=-=-=t ωα 转的圈数为 75.921517.8212212=⨯⨯===πωππθt N 5-3 如图5-3所示,半径r 1 = 30 cm 的A 轮通过皮带被半径为r 2 = 75 cm 的B 轮带动,B 轮以π rad/s 的匀角加速度由静止起动,轮与皮带间无滑动发生,试求A 轮达到3000 r/min 所需要的时间. 分析 轮与皮带间无滑动,则同一时刻,两轮边缘的线速度相同,均等于皮带的传送速度;两轮边缘的切向加速度也相同,均等于皮带的加速度.解 设A 、B 轮的角加速度分别为A α、B α,由于两轮边缘与皮带连动,切向加速度相同,即2B 1A r r αα=则 B 12A ααr r = A 轮角速度达到rad/s 6030002⨯=πω所需要的时间为 s 40s 75.06030.0300022B 1A =⨯⨯⨯⨯===ππαωαωr r tB A r 1 r 2图5-35-4 在边长为b 的正方形的顶点上,分别有质量为m 的四个质点,求此系统绕下列转轴的转动惯量:(1)通过其中一质点A ,平行于对角线BD 的转轴,如图5-4所示.(2)通过A 垂直于质点所在平面的转轴.分析 由若干质点组成的质点系对某转轴的转动惯量等于各质点对该转轴转动惯量的叠加.每一质点对转轴的转动惯量等于它的质量与其到转轴的垂直距离平方的乘积. 解 (1)因质点B 和D 到转轴的垂直距离A 2B 和A 1D 为a 22,质点C 到转轴的垂直距离AC 为a 2,而质点A 位于转轴上,则系统对通过A 点平行于BD 的转轴的转动惯量为()222132222ma am a m J =+⎪⎪⎭⎫ ⎝⎛=(2) 因质点B 和D 到转轴的垂直距离AB 和AD 为a ,质点C 到转轴的垂直距离AC 为a 2,而质点A 位于转轴上,则系统对通过A 垂于质点所在平面转轴的转动惯量为()2222422ma a m ma J =+=5-5 求半径为R ,质量为m 的均匀半圆环相对于图5-5中所示轴线的转动惯量.分析 如果刚体的质量连续分布在一细线上,可用质量线密度描述其分布情况,如果分布是均匀的,则质量线密度λ为常量.在刚体上取一小段线元l d ,质量为l d λ,对转轴的转动惯量为l r d 2λ,其中该线元AA 2B图5-4R图5-5到转轴的距离r 与线元在刚体上的位置有关.整个刚体的转动惯量就是刚体上所有线元转动惯量的总和,即所取线元的转动惯量对刚体分布的整个区域积分的结果.解 均匀半圆环的质量线密度为Rm πλ=,在半圆环上取一小段圆弧作为线元θd d R l =,质量为 θπθπλd d d d m R R m l m === 此线元到转轴的距离为θsin R r =,对轴线的转动惯量为m r d 2,则整个半圆环的转动惯量为2022221d sin d mR m R m r J =⋅==⎰⎰θπθπ 5-6 一轻绳跨过滑轮悬有质量不等的二物体A 、B ,如图5-6(a)所示,滑轮半径为20 cm ,转动惯量等于2m kg 50⋅,滑轮与轴间的摩擦力矩为m N 198⋅.,绳与滑轮间无相对滑动,若滑轮的角加速度为2rad/s 362.,求滑轮两边绳中张力之差. 分析 由于定轴转动的刚体的运动规律遵从转动定律,因此对于一个定轴转动的滑轮来说,仅当其质量可以忽略,转动惯量为零,滑轮加速转动时跨越滑轮的轻绳两边的张力才相等.这就是在质点动力学问题中通常采用的简化假设.在掌握了转动定律后,不应该再忽略滑轮质量,通常将滑轮考虑为质量均匀分布的圆盘,则跨越滑轮的轻绳两边的张力对转轴的合力矩是滑轮产生角加速度的原因.解 滑轮所受力和力矩如图5-6(b)所示,其中跨越滑轮的轻绳两边的张力分别为F T1和F T2,轴的支承力F N 不产生力矩,由转动定律可得fF T1 F T2(a) (b)图5-6αJ M R F F =--f T2T1)()(1f T2T1M J RF F +=-α N 101.08N )1.9836.250(2.01 3⨯=+⨯⨯= 5-7 如图5-7(a )所示的系统中,m 1 = 50 kg ,m 2 = 40 kg ,圆盘形滑轮质量m = 16 kg ,半径R = 0.1 m ,若斜面是光滑的,倾角为30°,绳与滑轮间无相对滑动,不计滑轮轴上的摩擦,(1)求绳中张力;(2)运动开始时,m 1距地面高度为1 m ,需多少时间m 1到达地面?分析 由于存在物体运动和滑轮定轴转动,而且必须考虑圆盘形滑轮的质量,这是一个质点动力学和刚体动力学的综合问题,应该采用隔离物体法,分别对运动物体作受力分析,对转动的滑轮作所受力矩的分析,然后分别应用牛顿第二定律和转动定律.解 (1)各物体与滑轮受力情况如图5-7(b )所示,其中F T1= F ’T1,F T2= F ’T2,轴对滑轮的支承力F N 不产生力矩,选取物体运动方向为坐标轴正向,分别应用牛顿第二定律和转动定律,可得m αF ’T1 F T1 m 2 m 1 F F T2a︒30m 2g m 1g(a ) (b )图5-7由于物体的加速度等于滑轮边缘的线速度,则αR a =,与以上各式联立解得22121rad/s 3021)(30sin =++︒-=g mR R m m m m α N 340)(1T1=-=αR g m FN 316)30sin (2T2=+︒=αR g m F2m/s 3==αR a(2) m 1到达地面的时间为s 0.816s 3122=⨯==a h t 5-8 飞轮质量为60 kg ,半径为0.25 m ,当转速为1000 r/min 时,要在5 s 内令其制动,求制动力F ,设闸瓦与飞轮间摩擦系数μ=0.4,飞轮的转动惯量可按匀质圆盘计算,闸杆尺寸如图5-8所示.分析 制动力F 作用在闸杆上,闸杆在制动力和飞轮的正压力的力矩作用下达到平衡,转动轴在墙上,这是刚体在力矩作用下的平衡问题.由于二力的力臂已知,应该求出闸杆与飞轮之间的正压力.飞轮受到闸杆的正压力、闸瓦与飞轮间摩擦力和轴的支承力作用,其中闸杆的正压力和轴的支承力的力矩为零,在闸瓦与飞轮间摩擦力的力矩作用下制动,应用转动定律可以求出摩擦力矩,然后由摩擦力与正压力关系可以求出闸杆与飞轮之间的正压力.F图5-8解 以飞轮为研究对象,飞轮的转动惯量为221mR J =,制动前角速度为rad/s 6010002⨯=πω,制动时角加速度为tωα-=.制动时闸瓦对飞轮的压力为F N ,闸瓦与飞轮间的摩擦力N f F F μ=,应用转动定律,得αα2f 21mR J R F ==- 则 t mR F μω2N =以闸杆为研究对象.在制动力F 和飞轮对闸瓦的压力-F N 的力矩作用下闸杆保持平衡,两力矩的作用力臂分别为m )75.050.0(+=l 和m 50.01=l ,则有01N =-l F FlN 157N 6054.021000225.06075.050.050.021N 1=⨯⨯⨯⨯⨯⨯⨯+===πμωt mR l l F l l F 5-9 一风扇转速为900 r/min ,当马达关闭后,风扇均匀减速,止动前它转过了75转,在此过程中制动力作的功为44.4 J ,求风扇的转动惯量和摩擦力矩.分析 合外力矩对刚体所作的功等于刚体的转动动能的增量.制动过程中风扇只受摩擦力矩作用,而且由于风扇均匀减速,表明摩擦力矩为恒定值,与风扇角位移的乘积就是所作的功.解 设制动摩擦力矩为M ,风扇转动惯量为J ,止动前风扇的角位移N πθ2=,摩擦力矩所作的功为N M M W πθ2⋅-=-=摩擦力矩所作的功应等于风扇转动动能的增量,即2210ωJ W -= 则 2222m kg 01.0m kg )60/2900()4.44(22⋅=⋅⨯-⨯-=-=πωWJ m N 0.0942m N 7524.442⋅=⋅⨯--=-=ππN W M5-10 如图5-10(a )所示,质量为24 kg 的鼓形轮,可绕水平轴转动,一绳缠绕于轮上,另一端通过质量为5 kg 的圆盘形滑轮悬有10 kg 的物体,当重物由静止开始下降了0.5 m 时,求:(1)物体的速度;(2)绳中张力.设绳与滑轮间无相对滑动.分析 这也是一个质点动力学和刚体动力学的综合问题,鼓形轮和滑轮都视为圆盘形定轴转动的刚体,应该采用隔离物体法,分别对运动物体作受力分析,对刚体作所受力矩的分析,然后分别应用牛顿第二定律和转动定律.解 各物体受力情况如图5-10(b )所示,其中F T1= F ’T1,F T2= F ’T2,鼓形轮的转动惯量为2121R m ,圆盘形滑轮的转动惯量为2221r m ,分别应用牛顿第二定律和转动定律,可得ma F mg =-T2222T1T221)(αr m r F F =- 121T121αR m R F = (1) 绳与滑轮间无相对滑动,物体的加速度等于鼓形轮和滑轮边缘的切向加速度,即12ααR r a ==.重物由静止开始下降了h = 0.5 m 时,速度ah 2=v ,由以上各式得αT1 F 2α ’T2 a F T2m g(a ) (b )图5-10m/s 2m/s )524(21105.08.9102)(212221=+⨯+⨯⨯⨯=++==m m m mgh ah v (2)绳中张力为N 48N 5241028.924102211T1=++⨯⨯⨯=++=m m m g mm F N 85N 5241028.9)524(102)(2121T2=++⨯⨯+⨯=+++=m m m g m m m F 5-11 一蒸汽机的圆盘形飞轮质量为200 kg ,半径为1 m ,当飞轮转速为120 r/min 时关闭蒸汽阀门,若飞轮在5 min 内停下来,求在此期间飞轮轴上的平均摩擦力矩及此力矩所作的功.分析 制动过程中飞轮只受摩擦力矩作用,该摩擦力矩不一定为恒定值,但是由于只需求平均摩擦力矩,因此可以假设飞轮均匀减速,由已知条件求出平均角加速度,再应用转动定律求出平均摩擦力矩.解 飞轮转动惯量为221mR J =,关闭蒸汽阀门后t = 5 min 内的平均角加速度为t00ωα-=,应用转动定律,平均摩擦力矩 m N 194m N 60560/212012002121202⋅-=⋅⨯⨯⨯⨯⨯-=-==.t mR J M πωα 在此期间平均摩擦力矩所作的功等于飞轮转动动能的增量J 7896J )60/2120(12002121 21212102220220-=⨯⨯⨯⨯⨯-=⋅-=-=πωωm R J W 负号表示平均摩擦力矩作负功,方向与飞轮旋转方向相反.5-12 长为85 cm 的均匀细杆,放在倾角为45°的光滑斜面上,可以绕过上端点的轴在斜面上转动,如图5-12(a)所示,要使此杆实现绕轴转动一周,至少应给予它的下端多大的初速度?分析 细杆在斜面上转动,斜面的支承力与转轴平行,转轴的支承力通过转轴,它们的力矩都为零,只有重力在转动平面内分量的力矩作功.解 如图5-12(b)所示,杆所受重力在转动平面内的分量为︒45sin mg ,当杆与初始位置的夹角为θ时,重力分量对转轴的力矩为θsin 2145sin l mg ⋅︒,此时若杆有角位移θd ,则重力矩所作的元功为θθd sin 2145sin d ⋅⋅︒=l mg W 杆从最低位置到最高位置重力矩所作的功为︒-=⋅⋅︒-==⎰⎰45sin d sin 2145sin d 0mgl l mg W W πθθ 重力矩所作的功等于此期间杆的转动动能的增量2021045sin ωJ mgl -=︒- 其中231ml J =,t00v =ω,则 m/s 5.94m/s 45sin 85.08.9645sin 60=︒⨯⨯⨯=︒=gl v5-13 如图5-13(a)所示,滑轮转动惯量为0.012m kg ⋅,半径为7 cm ,物体质量为5 kg ,由一绳与倔强系数k=200 N/m 的弹簧相连,若绳与滑轮间无相对滑动,滑轮轴上的摩擦忽略不计,求:(1)当绳拉直弹簧无伸长时,使物体由静止而下落的最大距离;(2)物体速度达最大值的位置及最大速率.v 0 ︒45 (a) (b) 图5-12分析 下面的5-17题中将证明,如果绕定轴转动的刚体除受到轴的支承力外仅受重力作用,则由刚体和地球组成的系统机械能守恒.如果将滑轮、地球和物体与弹簧组成一个弹性系统和重力系统合成的系统,当无重力和弹性力以外的力作功的情况下,整个系统的机械能守恒,可以应用机械能守恒定律.下面的解则仅应用功能原理和力矩所作的功与刚体转动动能的关系进行计算.解 (1) 物体由静止而下落到最低点时,速度为零,位移为1x ,在此期间重力所作的功完全转换为弹簧弹性势能的增量,即21121kx mgx = m 0.49m 2008.95221=⨯⨯==k mg x (2)物体与滑轮受力如图5-13(b)所示,设物体的最大速率为0v ,此时的位移为0x ,加速度00=a ,滑轮的角加速度000==R a α,分别应用牛顿第二定律和转动定律ma F mg =-T1αJ R F F =-)(T2T1可得此时T1F mg =,F T1= F T2,又因对于轻弹簧有0T2kx F =,则得m 0.245m 2008.950=⨯==k mg x 在此过程中,重力所作之功等于弹性势能的增量、物体动能和滑轮转动动能T1aF ’T1m m g(a) (b)图5-13的增量的和,即2020200212121ωJ m kx mgx ++=v 因R00v =ω,得 m/s 31.1m/s 9.85)07.001.05(2001)(122=⨯⨯+⨯=+=mg R J m k v5-14 圆盘形飞轮A 质量为m ,半径为r ,最初以角速度ω0转动,与A 共轴的圆盘形飞轮B 质量为4m ,半径为2r ,最初静止,如图5-14所示,两飞轮啮合后,以同一角速度ω转动,求ω及啮合过程中机械能的损失.分析 当物体系统所受的合外力矩为零时,系统的角动量守恒,在此过程中,由于相互作用的内力作功,机械能一般不守恒.解 以两飞轮组成的系统为研究对象,由于运动过程中系统无外力矩作用,角动量守恒,有ωωω2202)2(4212121r m mr mr += 得 0171ωω= 初始机械能为2022021412121ωωmr mr W =⋅= 啮合后机械能为2022222241171)2(421212121ωωωmr r m mr W =⋅+⋅= 则机械能损失为1202211716411716W mr W W W ==-=∆ω 5-15 一人站在一匀质圆板状水平转台的边缘,转台的轴承处的摩擦可忽略A图5-14不计,人的质量为m ’,转台的质量为10 m ’,半径为R .最初整个系统是静止的,这人把一质量为m 的石子水平地沿转台的边缘的切线方向投出,石子的速率为v (相对于地面).求石子投出后转台的角速度与人的线速度.分析 应用角动量守恒定律,必须考虑定律的适用条件,即合外力矩为零.此外还应该注意到,定律表达式中的角动量和角速度都必须是对同一惯性参考系选取的,而转动参考系不是惯性参考系.解 以人、转台和石子组成的系统为研究对象,由于系统无外力矩作用,角动量守恒,设转台角速度ω的转向与投出的石子速度v 方向一致,初始时系统角动量为零,得0=+v mR J ω 人和转台的转动惯量为221021R m R m J '+'=,代入上式后得 Rm m '-=6v ω 人的线速度 mm R '-=='6v v ω 其中负号表示转台角速度转向和人的线速度方向与假设方向相反.5-16 一人站立在转台上,两臂平举,两手各握一个m = 4 kg 的哑铃,哑铃距转台轴r 0 = 0.8 m ,起初,转台以ω0 = 2π rad/s 的角速度转动,然后此人放下两臂,使哑铃与轴相距r = 0.2 m ,设人与转台的转动惯量不变,且J = 52m kg ⋅,转台与轴间摩擦忽略不计,求转台角速度变为多大?整个系统的动能改变了多少?分析 角动量守恒定律是从定轴转动的刚体导出的,却不但适用与刚体,而且适用于绕定轴转动的任意物体和物体系统.解 以人、转台和哑铃组成的系统为研究对象,由于系统无外力矩作用,角动量守恒,有ωω)2()2(2020mr J mr J +=+rad/s 12.0rad/s 22.04258.042522220220=⨯⨯⨯+⨯⨯+=++=πωωmr J mr J 动能的增量为J183 J )2()8.0425(21J 12)2.0425(21 )2(21)2(2122222020220=⨯⨯⨯+⨯-⨯⨯⨯+⨯=+-+=-=∆πωωmr J mr J W W W 5-17 证明刚体中任意两质点相互作用力所作之功的和为零.如果绕定轴转动的刚体除受到轴的支承力外仅受重力作用,试证明它的机械能守恒.分析 在刚体动力学中有很多涉及重力矩作功的问题,如果能证明当只有重力矩作功时刚体和地球组成的系统机械能守恒,就能应用机械能守恒定律,而且还可以用刚体的质心的势能代替整个刚体中所有质点势能的总和,使求解过程大大简化. 证 刚体中任意两质点相互作用力沿转轴方向的分量对定轴转动不起作用,而在垂直于转轴的平面内的分量F 和-F 大小相等,方向相反,作用在一条直线上,如图5-17所示.设F 与转轴的垂直距离为ϕsin r ,则当刚体有微小角位移θd 时,力F 所作的功为θϕd sin Fr ,而其反作用力-F 所作的功为θϕd sin Fr -,二者之和为零,即刚体中任意两质点相互作用力所作之功的和为零.绕定轴转动的刚体除受到轴的支承力外仅受重力作用,刚体中任意质点则受到内力和重力作用,当刚体转动时,因为已经证明了任意两质点相互作用内力所作之功的和为零,则刚体中各质点相互作用力所作的总功为零,而且轴的支承力-F图5-17也不作功,就只有重力作功,因此机械能守恒.5-18 一块长m 50.0=L ,质量为m '=3.0 kg 的均匀薄木板竖直悬挂,可绕通过其上端的水平轴无摩擦地自由转动,质量m =0.1kg 的球以水平速度m/s 500=v 击中木板中心后又以速度m/s 10=v 反弹回去,求木板摆动可达到的最大角度.木板对于通过其上端轴的转动惯量为231L m J '= . 分析 质点的碰撞问题通常应用动量守恒定律求解,有刚体参与的碰撞问题则通常应用角动量守恒定律求解.质点对一点的角动量在第四章中已经讨论过,当质点作直线运动时,其角动量的大小是质点动量和该点到质点运动直线的垂直距离的乘积.解 对球和木板组成的系统,在碰撞瞬间,重力对转轴的力矩为零,且无其他外力矩作用,系统角动量守恒,碰撞前后球对转轴的角动量分别为021v mL 和v mL 21-,设碰后木板角速度为ω,则有 ωJ mL mL +-=v v 21210 设木板摆动可达到的最大角度为θ,如图5-18所示,木板摆动过程中只有重力矩作功,重力矩所作的功应等于木板转动动能的增量,即)1(cos 21d sin 2121002-'=⋅'-=-⎰θθθωθgL m L g m J (1) 由以上两式得388.050.08.90.34)1050(1.0314)(31cos 2222202=⨯⨯⨯+⨯⨯-='+-=gL m m v v θ ︒==19.67)388.0arccos(θ根据5-17的结果,由于木板在碰撞后除受到轴的支承力外仅受重力作用,v mm ’g图5-18它的机械能守恒,取木板最低位置为重力势能零点,达到最高位置时它的重力势能应等于碰撞后瞬间的转动动能,也可以得到(1)式.5-19 半径为R 质量为m '的匀质圆盘水平放置,可绕通过圆盘中心的竖直轴转动.圆盘边缘及R /2处设置了两条圆形轨道,质量都为m 的两个玩具小车分别沿二轨道反向运行,相对于圆盘的线速度值同为v .若圆盘最初静止,求二小车开始转动后圆盘的角速度.分析 当合外力矩为零时,应用角动量守恒定律应该注意到表达式中的角动量和角速度都是对同一惯性参考系选取的.转动参考系不是惯性参考系,所以小车对圆盘的速度和角动量必须应用相对运动速度合成定理转换为对地面的速度和角动量.解 设两小车和圆盘的运动方向如图5-19所示,以圆盘的转动方向为正向,外轨道上小车相对于地面的角动量为)(v -ωR mR ,内轨道上小车相对于地面的角动量为)21(21v +ωR R m ,圆盘的角动量为ωω221R m J '=.对于两小车和圆盘组成的系统,外力对转轴的力矩为零,角动量守恒,得ωωω221)21(21)(R m R R m R mR '+++-v v R m m m )25(2'+=v ω vωv图5-19。