机械设计基础 第6章间歇运动机构
- 格式:ppt
- 大小:1.10 MB
- 文档页数:22
目录第1章机械设计概述 (1)第2章摩擦、磨损及润滑概述 (3)第3章平面机构的结构分析 (12)第4章平面连杆机构 (16)第5章凸轮机构 (36)第6章间歇运动机构 (46)第7章螺纹连接与螺旋传动 (48)第8章带传动 (60)第9章链传动 (73)第10章齿轮传动 (80)第11章蜗杆传动 (112)第12章齿轮系 (124)第13章机械传动设计 (131)第14章轴和轴毂连接 (133)第15章轴承 (138)第16章其他常用零、部件 (152)第17章机械的平衡与调速 (156)第18章机械设计CAD简介 (163)第1章机械设计概述1.1机械设计过程通常分为哪几个阶段?各阶段的主要内容是什么?答:机械设计过程通常可分为以下几个阶段:1.产品规划主要工作是提出设计任务和明确设计要求。
2.方案设计在满足设计任务书中设计具体要求的前提下,由设计人员构思出多种可行方案并进行分析比较,从中优选出一种功能满足要求、工作性能可靠、结构设计可靠、结构设计可行、成本低廉的方案。
3.技术设计完成总体设计、部件设计、零件设计等。
4.制造及试验制造出样机、试用、修改、鉴定。
1.2常见的失效形式有哪几种?答:断裂,过量变形,表面失效,破坏正常工作条件引起的失效等几种。
1.3什么叫工作能力?计算准则是如何得出的?答:工作能力为指零件在一定的工作条件下抵抗可能出现的失效的能力。
对于载荷而言称为承载能力。
根据不同的失效原因建立起来的工作能力判定条件。
1.4标准化的重要意义是什么?答:标准化的重要意义可使零件、部件的种类减少,简化生产管理过程,降低成本,保证产品的质量,缩短生产周期。
第2章摩擦、磨损及润滑概述2.1按摩擦副表面间的润滑状态,摩擦可分为哪几类?各有何特点?答:摩擦副可分为四类:干摩擦、液体摩擦、边界摩擦和混合摩擦。
干摩擦的特点是两物体间无任何润滑剂和保护膜,摩擦系数及摩擦阻力最大,磨损最严重,在接触区内出现了粘着和梨刨现象。
第6章 间歇运动机构6.1 复习笔记主动件连续运动(连续转动或连续往复运动)时,从动件做周期性时动、时停运动的机构成为间歇运动机构。
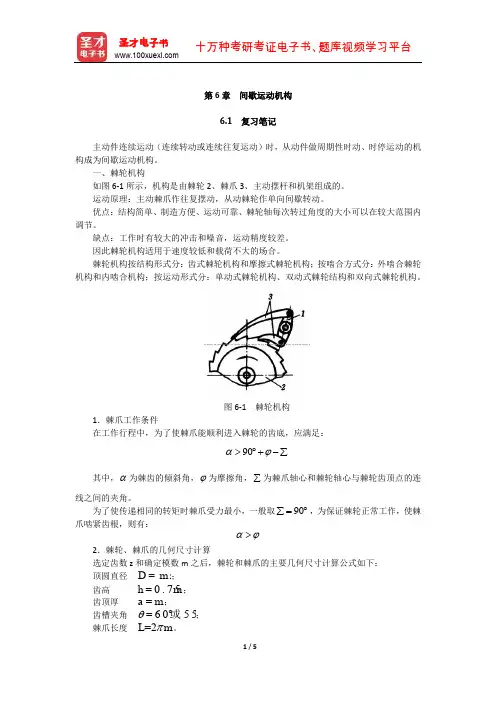
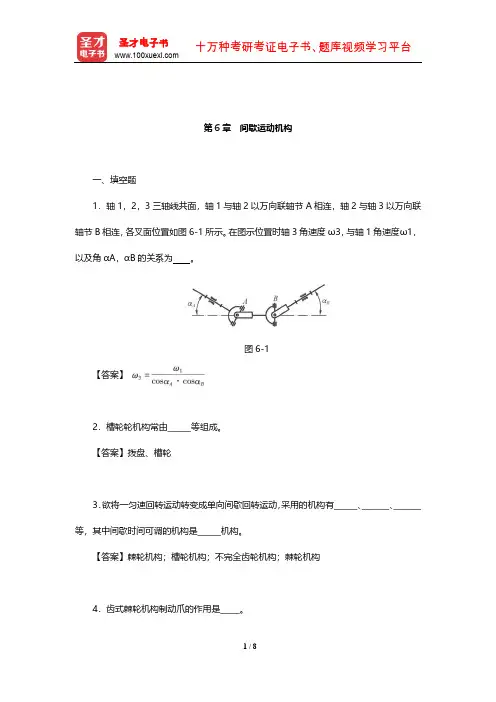
一、棘轮机构如图6-1所示,机构是由棘轮2、棘爪3、主动摆杆和机架组成的。
运动原理:主动棘爪作往复摆动,从动棘轮作单向间歇转动。
优点:结构简单、制造方便、运动可靠、棘轮轴每次转过角度的大小可以在较大范围内调节。
缺点:工作时有较大的冲击和噪音,运动精度较差。
因此棘轮机构适用于速度较低和载荷不大的场合。
棘轮机构按结构形式分:齿式棘轮机构和摩擦式棘轮机构;按啮合方式分:外啮合棘轮机构和内啮合机构;按运动形式分:单动式棘轮机构、双动式棘轮结构和双向式棘轮机构。
图6-1 棘轮机构1.棘爪工作条件在工作行程中,为了使棘爪能顺利进入棘轮的齿底,应满足:90αϕ>︒+-∑其中,α为棘齿的倾斜角,ϕ为摩擦角,∑为棘爪轴心和棘轮轴心与棘轮齿顶点的连线之间的夹角。
为了使传递相同的转矩时棘爪受力最小,一般取90∑=︒,为保证棘轮正常工作,使棘爪啮紧齿根,则有:αϕ>2.棘轮、棘爪的几何尺寸计算选定齿数z 和确定模数m 之后,棘轮和棘爪的主要几何尺寸计算公式如下: 顶圆直径 D m z =;齿高 0.75h m =;齿顶厚 a m =; 齿槽夹角6055θ=︒︒或;棘爪长度 2=L m π。
二、槽轮机构如图6-2中所示,该机构是由带圆销的主动拨盘1、带有径向槽的从动槽轮2以及机架组成的。
其中,拨盘和槽轮上都有锁止弧:槽轮上的凹圆弧、拨盘上的凸圆弧都是起锁定作用。
工作特点:拨盘连续回转,当两锁止弧接触时,槽轮静止;反之槽轮运动,实现了将连续回转变换为间歇转动。
特点:结构简单、制造容易、工作可靠、机械效率高,能平稳地、间歇地进行转位。
因槽轮运动过程中角速度有变化,存在柔性冲击,因此不适合高速运动场合。
图6-2 槽轮机构运动特性系数τ:槽轮每次运动的时间m t 对主动构件回转一周的时间t 之比,有:m 2=2-=t z t zτ 其中,z 为槽数,是槽轮机构的主要参数。
《机械设计基础》习题解答目录第0章绪论-------------------------------------------------------------------1 第一章平面机构运动简图及其自由度----------------------------------2 第二章平面连杆机构---------------------------------------------------------4 第三章凸轮机构-------------------------------------------------------------6 第四章齿轮机构------------------------------------------------------- -----8 第五章轮系及其设计------------------------------------------------------19 第六章间歇运动机构------------------------------------------------------26 第七章机械的调速与平衡------------------------------------------------29 第八章带传动---------------------------------------------------------------34 第九章链传动---------------------------------------------------------------38 第十章联接------------------------------------------------------------------42 第十一章轴------------------------------------------------------------------46 第十二章滚动轴承--------------------------------------------------50第十三章滑动轴承------------------------------------------------ 56第十四章联轴器和离合器-------------------------- 59第十五章弹簧------------------------------------62第十六章机械传动系统的设计----------------------65第0章绪论12-3机器的特征是什么?机器和机构有何区别?[解] 1)都是许多人为实物的组合;2)实物之间具有确定的相对运动;3)能完成有用的机械功能或转换机械能。

《机械设计基础》课程重点总结绪论机器是执行机械运动的装置,用来变换或传递能量、物料、信息。
原动机:将其他形式能量转换为机械能的机器。
工作机:利用机械能去变换或传递能量、物料、信息的机器。
机器主要由动力部分、传动部分、执行部分、控制部分四个基本部分组成,它的主体部分是由机构组成。
机构:用来传递运动和力的、有一个构件为机架的、用构件间能够相对运动的连接方式组成的构件系统。
机构与机器的区别:机构只是一个构件系统,而机器除构件系统外,还含电器、液压等其他装置;机构只用于传递运动和力,而机器除传递运动和力之外,还具有变换或传递能量、物料、信息的功能。
零件是制造的单元,构件是运动的单元,一部机器可包含一个或若干个机构,同一个机构可以组成不同的机器.机械零件可以分为通用零件和专用零件。
机械设计基础主要研究机械中的常用机构和通用零件的工作原理、结构特点、基本的设计理论和计算方法.第一章平面机构的自由度和速度分析1.平面机构:所有构件都在相互平行的平面内运动的机构;构件相对参考系的独立运动称为自由度;所以一个作平面运动的自由机构具有三个自由度.2.运动副:两构件直接接触并能产生一定相对运动的连接。
两构件通过面接触组成的运动副称为低副;平面机构中的低副有移动副和转动副;两构件通过点或线接触组成的运动副称为高副;3.绘制平面机构运动简图;P84.机构自由度计算公式:F=3n-2P l-P H 机构的自由度也是机构相对机架具有的独立运动的数目.原动件数小于机构自由度,机构不具有确定的相对运动;原动件数大于机构自由度,机构中最弱的构件必将损坏;机构自由度等于零的构件组合,它的各构件之间不可能产生相对运动;机构具有确定的运动的条件是:机构自由度F 〉0,且F等于原动件数5.计算平面机构自由度的注意事项:(1)复合铰链:两个以上构件同时在一处用转动副相连接(图1-13)(2)局部自由度:一种与输出构件运动无关的的自由度,如凸轮滚子(3)虚约束:重复而对机构不起限制作用的约束P13(4)两个构件构成多个平面高副,各接触点的公共法线彼此重合时只算一个高副,各接触点的公共法线彼此不重合时相当于两个高副或一个低副,而不是虚约束。
第6章 间歇运动机构6.1 某牛头刨床工作台横向进给丝杆的导程为5 mm ,与丝杆联动的棘轮齿数为40,求此牛头刨床的最小横向进给量是多少?若要求此牛头刨床工作台的横向进给量为0.5mm ,则棘轮每次能转过的角设应为多少?答:牛头刨床的横向进给量最小为m in 50.125m m 40f ==若要求其横向进给量为0.5mm ,则棘轮每次转过的角度应为0.5360360.12540⨯=6.2 某外啮合槽轮机构中槽轮的槽数z =6,圆销的数目k =1,若槽轮的静止时间1s2rt =,试求主动拨盘的转速n 。
答:主动拨盘的转速为:36018036016rs 23603n -+==⨯6.3 在六角车床上六角刀架转位用的外啮合槽轮机构中,已知槽轮槽数z =6,槽轮停歇时间15s r 6t =,运动时间m 5s r3t =,求槽轮机构的运动系数τ及所需的圆柱销数目。
答:运动系数53m 551m6323t t t τ===++所需圆柱销数目232622(2)(62)z k z τ⨯⨯===--6.4内啮合槽轮机构能不能采用多圆柱销拨盘? 答:不能。
第七章 螺纹连接与螺旋传动7.1常用螺纹的种类有哪些?各用于什么场合?答:常用螺纹的种类有普通螺纹、管螺纹、矩形螺纹、梯形螺纹和锯齿形螺纹,前两种主要用于联接,后三种主要用于传动。
7.2螺纹的主要参数有哪些?怎样计算? 答:螺纹的主要参数有:(1)大径d ;(2)小径d 1;(3)中径d 2;(4)螺距P ;(5)导程S ;(6)升角λ;22tan SnPd d λππ==;(7)牙型角α、牙型斜角β。
7.3 螺纹的导程和螺距有何区别?螺纹的导程S 和螺距P 与螺纹线数n 有何关系?答:螺距是螺纹相邻两牙在中径线上对应两点间的轴向距离,导程则是同一螺旋线上相邻两牙在中径线上对应两点间的轴向距离。
导程S 、螺距P 、螺纹线数n 之间的关系:S nP =。
7.4 根据牙型的不同,螺纹可分为哪几种?各有哪些特点?常用的连接和传动螺纹都有哪些牙型?答:根据牙型的不同,螺纹可分为普通螺纹、管螺纹、矩形螺纹、梯形螺纹和锯齿形螺纹。
机械设计基础复习思考题第1章平面机构的自由度和速度分析1. 什么是机构的自由度?如何计算?2 .什么是局部自由度?出现在哪些场合?什么是复合铰链?铰链数和构件数有何关系?什么是虚约束?一般出现在哪些场合?具体计算机构自由度时如何正确去掉局部自由度和虚约束?3. 你能熟练掌握平面机构自由度的正确计算方法吗?4 .何谓速度瞬心?瞬心数目与构件数有何关系?通过运动副相联两构件的瞬心位置如何确定?5.何谓三心定律?第2章平面连杆机构1.在铰链四杆机构中,转动副成为周转副的条件是什么?2.铰链四杆机构的形式和尺寸之间关系如何?曲柄存在条件是什么?3. 何谓行程速比系数K?它描述了机构的什么特性?它与极位夹角有何关系?4. 曲柄摇杆机构、曲柄滑块机构及摆动导杆机构是否都存在急回特性?什么情况下没有急回特性?5.曲柄摇杆机构中,当以曲柄为原动件时,是否存在死点?6 . 机构的压力角和传动角是如何定义的?它们对传力性能有何影响?设计四杆机构时,对传动角有何要求?7.你掌握了按给定行程速比系数K和连杆位置设计铰链四杆机构的方法吗?第3章凸轮机构1.凸轮机构有哪些类型?特点如何?2.何谓刚性冲击和柔性冲击?它们出现在哪几种常用运动规律中?3.何谓理论轮廓曲线?何谓实际轮廓曲线?为何要这样区分?作图时是否可以不画理论轮廓曲线,而直接绘制实际轮廓曲线?6 . 反转法理论45.何谓凸轮工作廓线的变尖现象和推杆运动规律失真现象,它对凸轮机构的正常工作有何影响?如何加以避免?6.凸轮的压力角是如何定义的?压力角的大小会对工作产生什么影响?第4章齿轮机构1.什么是齿距、齿厚、齿槽宽、模数?它们之间有何关系?2 .分度圆是如何定义的?何谓标准齿轮?3.标准齿轮的基本参数和各部分几何尺寸如何?4.渐开线齿轮传动的正确啮合条件如何?5.具有标准中心距的标准齿轮传动具有哪些特点?6 .齿轮为什么要变位?变位齿轮的几何尺寸哪些有变化?哪些不变?7.用范成法加工齿轮产生根切的几何条件是什么?为避免根切,有哪两种实际可行的措施?8 .斜齿轮机构的基本参数、正确啮合条件和重合度有何特点?斜齿轮机构有哪些优缺点?第4章齿轮机构1.什么是齿距、齿厚、齿槽宽、模数?它们之间有何关系?2 .分度圆是如何定义的?何谓标准齿轮?3.标准齿轮的基本参数和各部分几何尺寸如何?4.渐开线齿轮传动的正确啮合条件如何?5.具有标准中心距的标准齿轮传动具有哪些特点?6 .齿轮为什么要变位?变位齿轮的几何尺寸哪些有变化?哪些不变?7.用范成法加工齿轮产生根切的几何条件是什么?为避免根切,有哪两种实际可行的措施?8 .斜齿轮机构的基本参数、正确啮合条件和重合度有何特点?斜齿轮机构有哪些优缺点?第5章轮系1.何谓转化轮系?它与原来的轮系有何联系与区别?为什么要引进此概念?2.轮系传动比的正负表示什么意思?这种表示方法的适用范围如何?3 .既然轮系中的过桥齿轮不影响轮系的传动比大小,为什么要采用过桥齿轮?4.周转轮系传动比计算的一般公式如何?具体应用时应注意什么问题?5.如何计算复合轮系的传动比?第6章间歇运动机构1.间歇运动机构的类型2.棘轮机构有哪些类型?其运动特点如何?各有何用处?3.槽轮的槽数最少为几个?什么情况下才采用多圆销的拨盘?圆销的个数是否可以任意选取?为什么?4.运动系数与槽轮的槽数以及圆销个数有何关系?第7章机械运转速度波动的调节1.调速的方法有哪两种?各适合于什么场合?2.飞轮为什么可用来调速?它适合于什么场合?第8章机械的平衡1.何谓静平衡?何谓动平衡?各应满足什么条件?第10章联接1.常用螺纹的牙型有那几种?2.如何判断螺旋的旋向?3.何谓单线螺纹和多线螺纹?,螺距与导程有何关系?4.何谓联接螺纹和传动螺纹?5.螺纹的主要参数有哪些?各用什么符号表示?(大径d、小径d1、中径d2、螺距P、导程S、螺旋升角ψ、牙型角α、牙侧角β6.何谓螺纹的自锁?自锁的条件是什么?7.三角形普通螺纹与管螺纹的牙型角各为多少度?8.何谓粗牙螺纹和细牙螺纹?9.梯形螺纹和锯齿型螺纹的牙侧角各是多少?用于何种场合?10.键的作用是什么?11.键的类型有哪几种?12. 当同一轴段采用两个键时,这两个键应于何布置?第11章齿轮传动1.齿轮传动的特点2.齿轮的失效形式有哪些?3.齿轮常用材料及热处理方法有哪些?4.直齿轮切向力、径向力、法向力如何计算?5.软齿面闭式齿轮传动的设计模式如何?6.硬齿面闭式齿轮传动的设计模式如何?7.开式齿轮传动的设计模式如何?8.斜齿轮切向力、径向力、轴向力如何计算?9.斜齿轮的螺旋角通常取多少?人字齿轮的螺旋角一般取多少?第12章蜗杆传动1.蜗杆传动的优缺点有哪些?2.蜗杆传动的正确啮合条件如何?3.蜗杆的导程角与蜗轮的螺旋角有何关系?4.蜗杆的分度圆直径、导程角如何计算?5.蜗轮旋转方向如何确定?6.为什么蜗轮常采用青铜制造?7.轴向力的方向如何确定?8为什么要进行蜗杆传动的热平衡计算?第13章带传动与链传动1.带传动有哪些有缺点?2.带传动的紧边与松边有何关系?3.最大应力包括哪几部分?出现在何处?4.何谓带传动的弹性滑动?5.为什么要限制带轮的最小直径?6.对小带轮的包角有何限制?可采取哪些措施可增大包角?7.带传动的设计步骤如何?8.链传动有哪些特点?传动范围如何?9.链传动有哪些优缺点?10.为什么链条的节数最好取偶数?而链轮齿数最好取奇数?第14章轴1.轴的作用如何?2.轴的类型有哪些?转轴、传动轴、心轴的承受载荷有何区别?3.轴的常用材料有哪些?4.轴的设计应考虑哪些要求?5.用什么方法可实现轴上零件的轴向与周向固定?6.按弯扭合成计算轴的强度时,为什么要引入折合系数?第16章滚动轴承1.滚动轴承由哪些零件组成?各零件的起何作用?2.滚动轴承有哪些优缺点?3.何谓滑动轴承的接触角?它与轴向承载能力有何关系?4.滚动轴承基本代号代表什么含义?5.滚动轴承的失效形式有哪些?6.何谓滚动轴承的寿命?7.何谓滚动轴承的可靠度?8.何谓滚动轴承的基本额定寿命?9.滚动轴承的密封形式有哪些?10.滚动轴承常用的固定形式有那两种?。
第6章间歇运动机构6.1 复习笔记【通关提要】本章主要介绍了棘轮机构、槽轮机构、不完全齿轮机构和凸轮间歇运动机构这四种间歇运动机构的基本原理和特点。
学习时需要牢记特点和相关计算公式。
本章多以判断题和简答题的形式出现,但是在考研中本章出现的几率较小,复习时需酌情删减内容,重点记忆。
【重点难点归纳】一、棘轮机构、槽轮机构、不完全齿轮机构三种间歇运动机构原理比较(见表6-1-1)表6-1-1 三种间歇运动机构原理比较二、棘轮机构(见表6-1-2)表6-1-2 棘轮机构图6-1-1 棘爪受力分析三、槽轮机构(见表6-1-3)表6-1-3 槽轮机构四、不完全齿轮机构(见表6-1-4)表6-1-4 不完全齿轮机构五、凸轮间歇运动机构1.形式凸轮间歇运动机构通常有两种形式:圆柱形凸轮间歇运动机构和蜗杆形凸轮间歇运动机构。
2.优点运转可靠、传动平稳、定位精度高,适用于高速传动,转盘可以实现任何运动规律,转盘转动与停歇时间的比值可以通过改变凸轮推程运动角来得到。
6.2 课后习题详解6-1 已知一棘轮机构,棘轮模数m=5mm,齿数z=12,试确定机构的几何尺寸并画出棘轮的齿形。
解:顶圆直径D=m z=5×12mm=60mm齿高h=0.75m=0.75×5mm=3.75mm齿顶厚a=m=5mm齿槽夹角θ=60°棘爪长度L=2πm=2π×5mm=31.4mm棘轮的齿形如图6-2-1所示。
图6-2-16-2 已知槽轮的槽数z=6,拨盘的圆销数K=1,转速n1=60r/min,求槽轮的运动时间t m和静止时间t s。
解:槽轮机构的运动特性系数:τ=t m/t=2φ1/(2π)=(z-2)/(2z)=1/3。
拨盘转速n1=60r/min,故拨盘转1转所用的时间为1s。
槽轮的运动时间:t m=τt=1/3s。
槽轮的静止时间:t s=t-t m=2/3s。
第6章其他常用机构6.1 考点提要6.1.1 重要概念及术语槽轮机构,运动系数,棘轮机构,不完全齿轮机构6.1.2.槽轮机构槽轮机构由主动拨盘及拨盘上的圆销和具有径向槽的从动槽轮以及机架组成。
可将主动拨盘的匀速转动变换为槽轮的间歇运动,但槽轮的转动角不能调节,在槽轮转动的开始和结束时有柔性冲击。
但鉴于其结构简单紧凑,效率高,能平稳地间歇转位,所以得到广泛运用。
槽轮机构的运动系数是指主动拨盘转一周时,槽轮的运动时间d t 与主动拨盘转一周的时间t 之比,所以又称动停比。
对于外槽轮有:11()2d t k t Zτ==- (6-4) 式中:k 为圆销数;Z 为槽轮的槽数。
由于01τ<≤,所以槽数3Z ≥,且 22Z k Z <- (6-5) 槽轮设计要把握以下原则:(1) 槽数不能太少,槽数多,则转动时间增加,运动更可以平稳些。
但也不可太多,太多则尺寸大,惯性力加大,而且当Z>9之后,运动系数变化很小了。
所以一般取4到8个槽。
(2) 圆销数多则运动系数增加,当要求槽轮动停时间相等时可以取运动系数为1。
(3) 槽轮的尺寸应按受力情况和实际机械所允许的空间安装尺寸定(4) 内槽轮机构只允许用一个圆销。
6.1.3.棘轮机构棘轮机构是由摇杆,棘爪,棘轮,止动爪及机架组成的饿。
结构简单,加工成本低,运动可靠,但冲击和噪音大,动程只能有级调节。
摩擦式棘轮可以无级调节但准确性相对较差。
为了使棘爪能顺利地进入棘轮空间,棘轮的齿面倾斜角必须大于摩擦角。
棘轮机构要可靠工作不许满足两个条件,一是棘爪推或拉棘轮的自动锁紧条件。
二是棘爪主动时要注意棘爪所在杆的摆动角度范围必须为棘轮行程角并在其前后各加一个空程角,以保证棘爪能落入下一个齿槽中。
6.2 模拟考题6.2.1 填空题1.棘轮机构主要由 、、、和制动棘爪组成。
2.棘轮机构按棘轮的运动方向可分为机构和机构。
3.棘轮机构的特点是、、可调节。
4.棘轮机构通常用调节和的方法调整棘轮转角的大小。