第四章电感式传感器
- 格式:ppt
- 大小:5.55 MB
- 文档页数:67
《传感器原理与应用》 , 第58页第四章电感式传感器电感式传感器是利用电磁感应把铰测的物理量加位移、压力、流量、振动等转换成线圈的自感系数人或互感系数AJ的变化,再由涵量电路转换为电压或电流的变化量输出,实现非电量到电量的转换。
电感式传感器具有以下特点:(1)结构简单,传感器无活动电触点,因此工作可靠寿命长;(2)灵敏度和分辨率高,能测出0.01Pm酌位移变化。
传感器的输出信号强,电压灵敏度一般每毫米的位移可达数百毫伏的输出;(3)线性度和重复性都比较好,在一定位移范围几十微米至数毫米内.传感器非线性误差可做到0.05%一0.1%,并且稳定性也较好。
同时.这种传感器能实现信息的远距离传辖、记录、显示和控制,它在上业自动控制系统中广泛被采用;但是它台频率响应较低,不宜快速动态测控等缺点。
电感式传感器种类很多,本章主要介绍自感式、互感式和涡流式三种传感器。
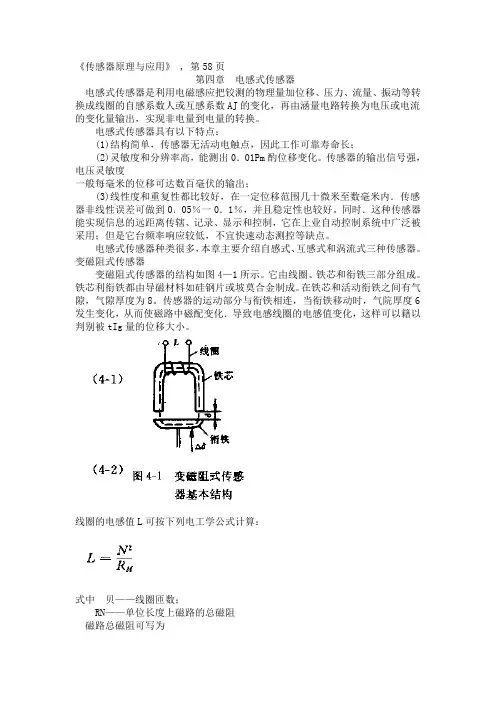
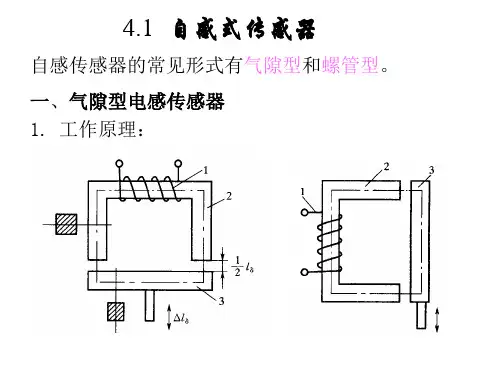
变磁阻式传感器变磁阻式传感器的结构如图4—1所示。
它由线圈、铁芯和衔铁三部分组成。
铁芯利衔铁都由导磁材料如硅钢片或坡莫合金制成。
在铁芯和活动衔铁之间有气隙,气隙厚度为8。
传感器的运动部分与衔铁相连,当衔铁移动时,气院厚度6发生变化,从而使磁路中磁配变化.导致电感线圈的电感值变化,这样可以籍以判别被tIg量的位移大小。
线圈的电感值L可按下列电工学公式计算:式中贝——线圈匝数;RN——单位长度上磁路的总磁阻磁路总磁阻可写为式中 Rf——铁芯磁阻;R6——空气气隙磁阻式(4—3)中第一项为铁芯磁阻v第二项为衔铁磁阻;Ll一一磁通通过铁芯助长度(m);4l——铁芯横截面积(m’);Al——铁芯材料的导磁率(H/m);乙——磁通通过衔铁的长度(m);A2——衔铁横截面积(m2);A:——衔铁材料的导磁率(H/m);j一—气隙厚度(m);A一—气隙横截面积(m’);P。
——空气的导磁率(4n×10“H/m)。
由于及f《Rj,常常忽略Rf,因此,可得线圈电感为《传感器原理与应用》 , 第59页由式(4—5)可知,当线圈匝数确定后,只要改变j和4均可导致电感的变化,因此v变碰阻式传感器又可分为变气隙厚度6的传原器和变气隙面积4的传感器。


第4章 电感式传感器1、 说明电感式传感器有哪些特点。
2、分析比较变磁阻式自感传感器、差动变压器式互感传感器的工作原理和灵敏度。
3、试分析差动变压器相敏检测电路的工作原理。
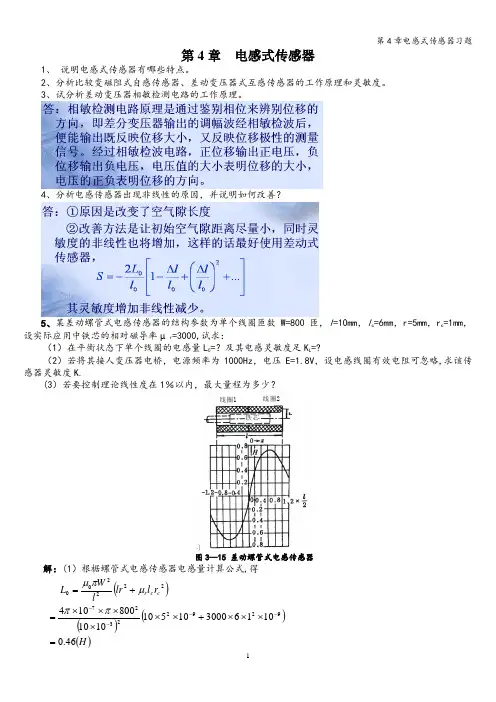
4、分析电感传感器出现非线性的原因,并说明如何改善?5、某差动螺管式电感传感器的结构参数为单个线圈匝数W=800匝,l =10mm ,l c =6mm ,r=5mm ,r c =1mm ,设实际应用中铁芯的相对磁导率µr =3000,试求:(1)在平衡状态下单个线圈的电感量L 0=?及其电感灵敏度足K L =?(2)若将其接人变压器电桥,电源频率为1000Hz ,电压E=1.8V ,设电感线圈有效电阻可忽略,求该传感器灵敏度K.(3)若要控制理论线性度在1%以内,最大量程为多少? 螺管式线圈插棒式铁芯线圈1线圈2铁芯(a)(b)图3—15 差动螺管式电感传感器解:(1)根椐螺管式电感传感器电感量计算公式,得()222200cc r r l lrlW L μπμ+=()()()H 46.010*********10101080010492922327=⨯⨯⨯+⨯⨯⨯⨯⨯⨯=----ππ差动工作灵敏度:rc L r l W K μπμ22202⋅= ()mm m m /6.151/6.15130001011010800104262327H =H =⨯⨯⨯⨯⨯⨯⨯=---ππ (2) 当f =1000Hz 时,单线圈的感抗为X L =ωL 0 =2πf L 0 =2π×1000×0。
46=2890(Ω) 显然X L 〉线圈电阻R 0,则输出电压为02L L E U O ∆=测量电路的电压灵敏度为H=H =H ⨯==∆=m mV V V L E L U K u /96.1/96.146.028.1200而线圈差动时的电感灵敏度为K L =151。
6mH/mm,则该螺管式电感传感器及其测量电路的总灵敏度为 H ⨯H =⋅=m mV mm m K K K u L /96.1/6.151 =297.1mV/mm6、有一只差动电感位移传感器,已知电源电U sr =4V,f=400Hz ,传感器线圈铜电阻与电感量分别为R=40Ω,L= 30mH ,用两只匹配电阻设计成四臂等阻抗电桥,如习题图3—16所示,试求: (1)匹配电阻R 3和R 4的值;(2)当△Z=10时,分别接成单臂和差动电桥后的输出电压值; (3)用相量图表明输出电压sc U •与输入电压sr U •之间的相位差。

第4章电感式传感器四、简答题 1、 答:工作原理:假设:初级绕组W 1a =W 1b =W 1,次级绕组和W 2a =W 2b =W 2。
两个初级绕组的同名端顺向串联,两个次级绕组的同名端则反相串联。
当没有位移时,衔铁C 处于初始平衡位置,它与两个铁芯的间隙有δa 0=δb 0=δ0,则绕组W 1a 和W 2a 间的互感M a 与绕组W 1b 和W 2b 的互感M b 相等,致使两个次级绕组的互感电势相等,即e 2a =e 2b 。
由于次级绕组反相串联,因此,差动变压器输出电压U o =e 2a -e 2b =0。
当被测体有位移时,与被测体相连的衔铁的位置将发生相应的变化,使δa ≠δb ,互感Ma≠M b ,两次级绕组的互感电势e 2a ≠e 2b ,输出电压U o =e 2a -e 2b ≠0,即差动变压器有电压输出, 此电压的大小与极性反映被测体位移的大小和方向。
知识点:差动变隙式电感传感器2、答:变隙式电感传感器的输出特性与衔铁的活动位置、供电电源、线圈匝数、铁芯间隙iU Bo变隙式差动变压器结构有关。
知识点:变隙式电感传感器3、答:为改善变隙式电感传感器的非线性可采用差动结构。
如果变压器的供电电源稳定,则传感器具有稳定的输出特性;另外,电源幅值的适当提高可以提高灵敏度,但要以变压器铁芯不饱和以及允许温升为条件。
增加次级线圈和初级线圈的匝数比值和减小铁芯间隙都能使灵敏度提高。
知识点:变隙式电感传感器4、答:差动变压器式传感器主要有变隙式差动传感器和螺线管式差动变压器两种结构形式。
差动变压器式传感器根据输出电压的大小和极性可以反映出被测物体位移的大小和方向。
螺线管式差动变压器如采用差动整流电路,可消除零点残余电压,根据输出电压的符号可判断衔铁的位置,但不能判断运动的方向;如配用相敏检波电路,可判断位移的大小和方向。
知识点:差动变压器式传感器5、答:零点残余电压的产生原因:传感器的两次极绕组的电气参数与几何尺寸不对称,导致它们产生的感应电势幅值不等、相位不同,构成了零点残余电压的基波;由于磁性材料磁化曲线的非线性(磁饱和,磁滞),产生了零点残余电压的高次谐波(主要是三次谐波)。
第四章电感式传感器
4.1 比较差动式自感传感器和差动变压器在结构上及工作原理上的异同之处。
4.2 变间隙式、变截面式和螺管式三种电感式传感器各适用于什么场合?它们各有什么优缺点?
4.3 螺管式电感传感器做成细长形有什么好处?欲扩大螺管式电感传感器的线性范围,可以采取哪些措施?
4.4 差动式电感传感器测量电路为什么经常采用相敏检波(或差动整流)电路?试分析其原理。
4.5 试述电感传感器产生零位电压的原因和减小零位电压的措施。
4.6 差动变压器式传感器采用恒流激磁有什么好处?
4.7 电源频率波动对电感式传感器的灵敏度有何影响?如何确定传感器的电源频率?
4.8 试从电涡流式传感器的基本原理简要说明它的各种应用。
4.9 用反射式电涡流传感器测量位移(或振幅)时对被测体要考虑哪些因素?为什么?
4.10 反射式电涡流传感器探头线圈为什么通常做成扁平型?
4.11 试从压磁式传感器的工作原理和结构特点出发分析其应用场合。
4.12 若差动式自感传感器的两个线圈的有效电阻不等(R1≠R2),则在机械零位时存在零位电压(U≠0)。
试用矢量图分析能否用调整衔铁位置的方式使U0 =0?(设传感器接入下图电桥)。
4.13 试计算下图所示差动变压器式传感器接入桥式电路(顺接法)时的空载输出电压U0 ;已知初级线圈激磁电流为I 1 ,电源角频率为w,初、次级线圈间的互感为Ma 、Mb ,两个次级线圈完全相同。
又若同一差动变压器式传感器接成图(b)所示反串电路(对接法),问两种方法中哪一种灵敏度高?高几倍?。