气缸控制回路
- 格式:doc
- 大小:162.00 KB
- 文档页数:6
双作用气缸的速度控制回路1. 引言大家好,今天我们来聊聊一个听起来有点复杂,但其实挺有趣的主题——双作用气缸的速度控制回路。
听名字就觉得有点高大上,其实它就是个让机器更聪明的装置。
你想啊,就像我们在开车的时候,时速表可以让你知道车子开的快不快,气缸的速度控制回路也能让机器按照预定的速度“走”起来。
现在,快跟我一起深入这个“机械小世界”,看看它到底有多有趣吧!2. 什么是双作用气缸2.1 基本概念首先,我们得了解什么是双作用气缸。
简单来说,它就是一个可以往复运动的气缸。
它有两个工作腔,气体可以从一个腔体进入,推动活塞向一个方向移动;然后再从另一个腔体进入,活塞再返回。
听起来是不是有点像玩秋千?一来一去,挺有节奏的!2.2 工作原理那么,这个双作用气缸的工作原理又是怎样的呢?想象一下,你在玩气球。
把气球吹满,手一松,它就会“扑通”一下飞走。
气缸就是通过气体的压力推动活塞,完成相似的动作。
可别小看它,这里面可是有很多“门道”的。
通过控制气体的流入和流出,气缸就能精准地控制运动速度。
就像你的遥控小车,快慢随你调!3. 速度控制的重要性3.1 为何需要速度控制接下来,我们来聊聊为什么速度控制这么重要。
想象一下,如果没有速度控制,机器就像个失控的小孩,急得像热锅上的蚂蚁,快得让人心惊胆战。
想让它慢下来?没门!这可就麻烦了。
实际上,很多工业生产中,速度控制能提高效率,减少错误,让工作更安全。
3.2 如何实现速度控制那么,如何实现这种速度控制呢?这里就涉及到控制回路了。
我们可以通过调节气体的流量,改变气缸内气体的压力,从而控制活塞的运动速度。
就像调节水龙头,想让水流得快点还是慢点,随你便!所以,速度控制回路就像一个聪明的小管家,时刻关注着气缸的“动态”。
4. 控制回路的组成4.1 关键部件接下来,我们来看看速度控制回路的关键部件。
首先要提的是“阀门”,它就像个守门员,负责气体的进出。
然后是“传感器”,这小家伙就像眼镜蛇,敏锐得很,能够实时监测气缸的状态,让整个系统保持在最佳状态。
行程阀控制气缸连续往返气控回路实验
一、实验目的
认识气缸、气动阀,气泵及三大件实物和职能符号,了解其工作原理及各元件在系统中所起的作用。
二、实验装置
1.THPQD-1型气动与PLC实验设备
2.气动元件见下表:手旋阀1个、杠杆式机械阀2个、气控二位五通阀1个、双作用气缸1个。
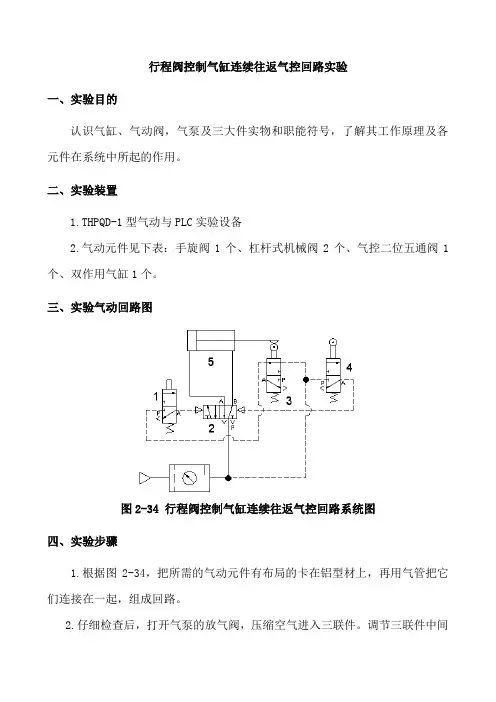
三、实验气动回路图
图2-34 行程阀控制气缸连续往返气控回路系统图
四、实验步骤
1.根据图2-34,把所需的气动元件有布局的卡在铝型材上,再用气管把它们连接在一起,组成回路。
2.仔细检查后,打开气泵的放气阀,压缩空气进入三联件。
调节三联件中间
的减压阀,使压力为0.4MPa,由原理图可知,气缸首先应退回气缸最底部,调整机械阀3,使阀3处在动作状态位,此后手旋手动阀1,使之换位,气缸前进,到头后,调整机械阀4,使阀4也工作在动作状态位,这样气缸便可周而复始的动作
3.使手动阀1复位,气缸退回到最底部后,便停止工作。
手动阀1手旋1次,气缸便往返一次。
五、思考题
1.为什么气缸能点动及连续运动?
2.分析系统的工作原理。
双作用气缸速度控制回路的设计与仿真首先,让我们先来了解双作用气缸的工作原理和速度控制的重要性。
双作用气缸是一种常见的执行器,用于实现线性运动。
它能够向两个方向(正向和反向)施加力,因此在很多工业应用中得到广泛使用。
然而,双作用气缸在运动过程中速度的控制非常重要。
如果速度控制不准确,可能会导致气缸的过冲或不足,从而影响工作的稳定性和效率。
PID控制器是一种经典的控制算法,常用于工程中的控制回路。
它基于目标值和实际值之间的误差来调整控制信号,以实现系统的稳定性和准确性。
在本文中,我们将使用PID控制器来设计双作用气缸的速度控制回路。
首先,我们需要建立一个双作用气缸的数学模型。
该模型将考虑气缸的质量、摩擦、惯性和弹簧等因素。
通过对气缸建模,我们可以了解控制系统的响应,并确定合适的控制参数。
接下来,我们将设计PID控制器。
PID控制器由比例、积分和微分三个部分组成。
其中,比例部分将增加控制信号与误差之间的线性关系。
积分部分将积累误差并校正系统的稳态误差。
微分部分将预测系统未来的变化趋势,并减少过冲和震荡。
为了确定PID控制器的参数,我们可以采用经典的试控法或自动调整方法,如Zeigler-Nichols方法或化简的调整法。
试控法将根据系统的动态响应手动调整PID参数,以达到期望的控制效果。
自动调整方法则将根据系统的频率响应自动调整PID参数,以实现最佳的控制性能。
完成PID控制器设计后,我们将进行仿真实验。
我们可以使用MATLAB或Simulink等工具来建立双作用气缸的模型,并将PID控制器与之联接。
通过改变控制参数或输入信号,我们可以观察系统的响应,并优化PID控制器的设计。
在仿真实验中,我们应该注意以下几点。
首先,应该确保气缸模型的准确性和完整性。
其次,我们应该模拟不同工况下的控制需求,以评估PID控制器的性能和稳定性。
最后,我们还可以考虑添加噪声或干扰信号,并评估PID控制器对这些干扰的鲁棒性。
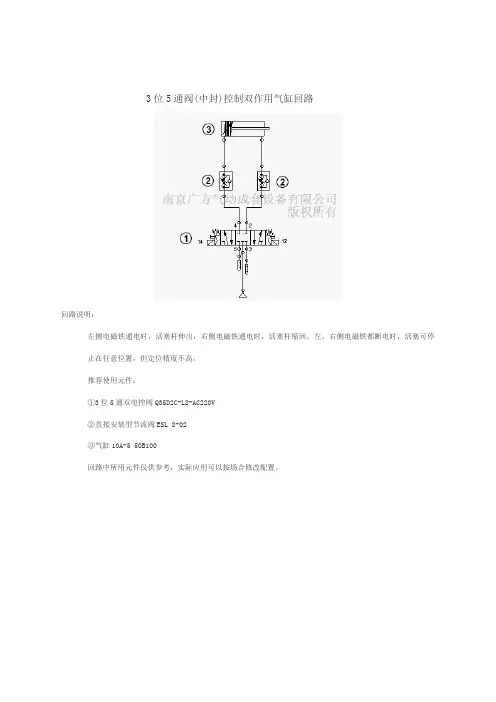
3位5通阀(中封)控制双作用气缸回路回路说明:左侧电磁铁通电时,活塞杆伸出,右侧电磁铁通电时,活塞杆缩回。
左,右侧电磁铁都断电时,活塞可停止在任意位置,但定位精度不高。
推荐使用元件:①3位5通双电控阀Q35D2C-L8-AC220V②直接安装型节流阀ESL 8-02③气缸10A-5 50B100回路中所用元件仅供参考,实际应用可以按场合修改配置。
3位5通阀(中排)控制双作用气缸回路回路说明:当电磁阀处于中间位置时,活塞杆处于自由状态,可由其他机构驱动。
推荐使用元件:①3位5通双电控阀Q35D2C-L8Y②直接安装型节流阀ESL 8-02③气缸10A-5 50B100回路中所用元件仅供参考,实际应用可以按场合修改配置。
3位5通阀(中压)控制双作用气缸回路回路说明:当左,右侧电磁铁同时断电时,活塞可停止在任意位置,但定位精度不高。
采用一个压力控制阀,调节无杆腔的压力,使得在活塞双向加压时,保持力的平衡。
推荐使用元件:①3位5通双电控阀Q35D2C-L8P-AC220V②减压阀QTYC-L8③直接安装型节流阀ESL 8-02④10A-5 50B200回路中所用元件仅供参考,实际应用可以按场合修改配置。
3位5通阀(中压)控制双作用双出轴气缸回路点击数: 27次作者: 德国burkert电磁阀上海销售处发布时文字大小〖大中小〗间: 2009-9-2 11:05:59回路说明:采用带有双活塞杆的气缸,使活塞两端受压面积相等,当双向加压时,也可保持力的平衡。
推荐使用元件:①3位5通双电控阀Q35D2C-L8P-AC220V②直接安装型节流阀ESL 8-02③双出轴缸QGEW-2 50B200回路中所用元件仅供参考,实际应用可以按场合修改配置。
多缸顺序控制回路的应用实例1. 引言多缸顺序控制回路是一种常见的控制系统,它可以用于控制多个活塞发动机的工作顺序。
本文将介绍多缸顺序控制回路的原理、应用实例以及优缺点。
2. 多缸顺序控制回路原理多缸顺序控制回路是一种基于电子控制单元的控制系统,它通过控制活塞发动机的点火顺序,实现多个缸的工作顺序控制。
其原理如下:1.传感器采集:控制系统通过传感器采集发动机的转速、气缸位置等参数。
2.信号处理:控制系统对采集到的信号进行处理,计算出每个缸的点火时机。
3.点火控制:控制系统根据计算结果控制点火系统,使每个缸在适当的时机点火。
4.工作顺序控制:控制系统根据设定的工作顺序,依次控制每个缸的点火。
3. 多缸顺序控制回路的应用实例多缸顺序控制回路广泛应用于汽车发动机、工业机械等领域。
下面将介绍两个应用实例。
3.1. 汽车发动机多缸顺序控制回路在汽车发动机中的应用是最为常见的。
汽车发动机通常采用多缸设计,每个缸都有一个点火系统。
通过多缸顺序控制回路,可以实现每个缸按照设定的顺序点火,从而保证发动机的平稳运行。
多缸顺序控制回路在汽车发动机中的工作原理如下:1.传感器采集:控制系统通过曲轴传感器监测发动机的转速。
2.信号处理:控制系统根据转速信号计算出每个缸的点火时机。
3.点火控制:控制系统通过点火模块控制每个缸的点火。
4.工作顺序控制:控制系统根据设定的工作顺序,依次控制每个缸的点火。
多缸顺序控制回路在汽车发动机中的应用可以提高发动机的燃烧效率,减少排放,提升动力性能。
3.2. 工业机械多缸顺序控制回路也广泛应用于工业机械中,特别是需要精确控制工作顺序的场合,如某些生产线上的装配工序。
在工业机械中,多缸顺序控制回路的应用可以实现以下目标:1.控制工作顺序:通过多缸顺序控制回路,可以精确控制每个工作站的工作顺序,确保产品的装配顺序正确。
2.提高生产效率:多缸顺序控制回路可以实现多个工作站的并行操作,提高生产效率。
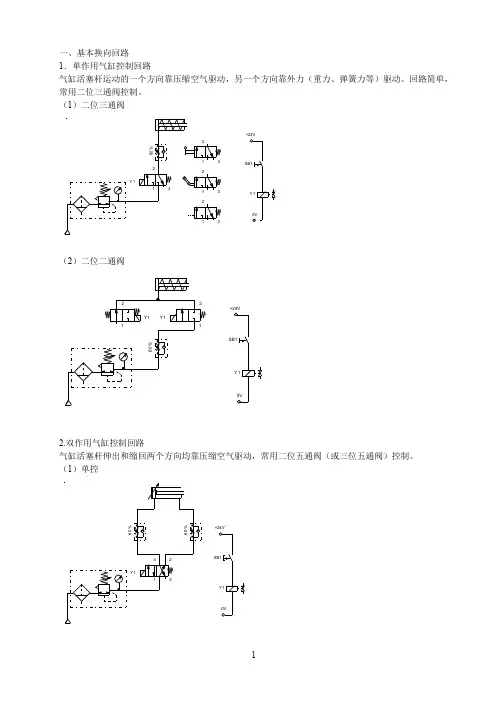
一、基本换向回路
1.单作用气缸控制回路
气缸活塞杆运动的一个方向靠压缩空气驱动,另一个方向靠外力(重力、弹簧力等)驱动。
回路简单,常用二位三通阀控制。
(1)二位三通阀
(2)二位二通阀
2.双作用气缸控制回路
气缸活塞杆伸出和缩回两个方向均靠压缩空气驱动,常用二位五通阀(或三位五通阀)控制。
(1)单控
(2)双控
换向电信号可为短脉冲信号,电磁铁发热少,具有断电保持功能。
(3)三位五通阀换向
(a )中间封闭 (b )中间排气
(a )中间封闭:活塞可在任意位置停留,但定位精度不高。
(b )中间排气:中间位置时,活塞处于自由状态,可由其他机构驱动。
(c )中间加压(单活塞杆) (d )中间加压(双活塞杆)
(c )中间加压(单活塞缸):采用一个减压阀调节无杆腔的压力,使得在活塞双向加压时,保持力平衡。
(d )中间加压(双活塞杆):活塞两端受力面积相等,故无需压力控制阀即可保持力的平衡。
补充:如果没有合适的三位阀,想让气缸在任意位置停留,用以下方法试试。
Y3
(4)电磁远程控制
可用于有防爆等要求的特殊场合。
Y1
(5)双气控阀控制
主控阀为双气控二位五通阀,用两个二位三通阀作为先导阀,可进行远程控制。
(6)带有自保回路的气动控制回路
手动1手动2
两个手动二位二通阀分别控制气缸运动的两个方向,如果将手动阀1按下,则二位五通阀上腔进气切换,气缸左腔进气,右腔排气,同时自保持回路abc也从阀的上腔进气,以防止中途手动阀1失灵,造成误动作。
手动阀1复位,手动阀2按下,主控阀复位,气缸缩回,开始下一循环。
气动基本回路气动常用回路气动基本回路是指通过气动元件和管路构成的气动系统中的基本回路。
气动常用回路是指在工业自动化控制系统中经常使用的一些气动回路。
本文将介绍气动基本回路和气动常用回路的一些概念和应用。
气动基本回路主要包括气源回路、执行回路和控制回路。
气源回路是指气动系统中提供压缩空气的部分,通常包括压缩空气发生器、气源处理装置和储气设备。
执行回路是指通过气动执行元件来实现机械运动的部分,通常包括气缸和气动执行阀等。
控制回路是指用来控制执行元件的控制系统,通常包括开关、传感器和控制阀等。
气动常用回路包括单向气缸回路、双向气缸回路、速度控制回路、位置控制回路、压力控制回路等。
单向气缸回路是指通过一个气缸来实现单个工作机构的运动控制,常用于一些简单的工作场合。
双向气缸回路是指通过两个气缸来实现工作机构的正反转运动控制,常用于一些需要双向运动的工作场合。
速度控制回路是通过调节气缸的进气量来实现对气缸运动速度的控制,常用于一些对速度要求较高的工作场合。
位置控制回路是通过使用位置传感器来检测工作机构的位置,并通过控制阀来调节气缸的进气量,从而实现对工作机构位置的控制。
压力控制回路是通过使用压力传感器来检测气缸的压力,并通过控制阀来调节气缸的进气量,从而实现对气缸压力的控制。
气动基本回路和气动常用回路在工业自动化控制系统中具有广泛的应用。
其优点包括响应速度快、动力强、结构简单、成本低廉等。
因此,在许多工业领域中,气动系统被广泛应用于各种自动化生产线、机械设备和工艺控制系统中。
气动基本回路和气动常用回路是工业自动化控制系统中常用的回路类型。
通过对气源回路、执行回路和控制回路的合理设计和配置,可以实现对工作机构的运动控制、速度控制、位置控制和压力控制等功能。
气动系统具有快速响应、动力强大、结构简单、成本低廉等优点,因此在工业领域中具有广泛的应用前景。
纯气动多气缸控制回路设计随着自动化技术的发展,气动系统在工业领域中得到了广泛的应用。
纯气动多气缸控制回路设计是其中的一个重要内容,它能够实现多个气缸的协调工作,提高生产效率和质量。
其次是气缸部分的设计。
气缸是纯气动多气缸控制回路中最重要的执行元件。
在气缸部分的设计中,需要考虑气缸的类型、规格和数量。
常见的气缸有单作用气缸和双作用气缸等。
根据实际应用需求,选择适当的气缸类型和规格。
在多气缸控制中,需要考虑气缸的协调工作,避免气缸之间的干扰和冲突。
控制部分是纯气动多气缸控制回路设计中的核心部分。
在控制部分的设计中,需要考虑控制信号的传输、处理和转换。
常见的控制信号有电磁信号、气动信号和传感器信号等。
根据不同的应用需求,选择适当的控制元件,如电磁阀、压力传感器、位置传感器等。
此外,还需要设计合理的控制逻辑和策略,实现多气缸的协调工作和过程控制。
安全部分是纯气动多气缸控制回路设计中的重要组成部分。
在安全部分的设计中,需要考虑系统的故障检测和应急措施。
常见的安全措施有过载保护、应急停机和安全门等。
通过合理设计和配置安全元件,能够保证系统的安全运行和人员的安全。
在纯气动多气缸控制回路设计中,还需要注意以下几个方面:一是系统的电气与气动接口设计,保证控制信号的可靠传输和处理;二是系统的节能设计,减少能源的消耗和环境的污染;三是系统的维护和管理,定期检查和保养设备,及时处理故障和异常情况。
总之,纯气动多气缸控制回路设计是一个复杂的工程问题,需要综合考虑气源、气缸、控制和安全等方面的要求。
只有合理设计和配置各个部分,才能够实现多气缸的协调工作,提高生产效率和质量。
PLC連結雙氣壓缸來回作迴路實習目的瞭解如何利用PLC來做複雜的氣壓缸控制。
瞭解PLC和傳統使用繼電器及相關電氣式元件來控制氣壓缸之差別。
實習器材雙動氣壓缸 2支5/2位雙綠圈電磁換向閥(含導線) 2個空氣式極限開關 4個三點組合氣壓源 1組直流電源供應器 1組氣壓源分歧接頭 1個FP1(或A1)type可程式控制器 1台實習原理今考慮如下的控制迴路,其位移步驟之迴路圖如圖9-1(a)所示,其氣壓迴路圖如圖9-1(b)所示,透過圖9-1(c)我們可以清楚地了解整個原始的電氣控制迴路圖,接著我們只需將9-1(c)化成可程式控制器的內部繼電器接點,即可達成以可程式控制器控制兩個雙動仔壓缸的目的。
其程式語言階梯圖如圖9-1(d)所示。
接線方式由於我們有使用到X1、X2、X3、X4來做為極限開關的接點,在FP1的做法是:1.原來的指揆開關X9~X7卸下。
(鬆開螺絲即可)2.依照螺絲上方面板所示,將C34+與COM(+)以導線連接。
3.將極限開關的a(或b)和COM,與PLC上的DC24-和0(~7)連接。
4.壓接極限開關並觀察X0(~7)是否有亮滅情形,若有則表示接線正確。
5.請在接線時拔除PLC電源,詳見圖9-1(c)所示。
同理,今若改為使用A1-type的PLC部分之導線則較簡單,如圖9-1(f)所示,僅需連接二組接點。
相關範例示範例題一現有AB兩氣壓缸,請依位移步驟圖設計控制迴路。
位移步驟圖如圖9-2(a)所示:使用5/2雙線圖電磁閥來設計。
氣壓迴路圖如圖9-2(b)所示。
程式階梯圖如圖9-2(c)所不。
啟動時請將氣缸放至初始位置。
例題二現有AB兩氣壓缸,請依位移步驟圖設計控制迴路。
位移步驟圖如圖9-3(a)所示。
使用5/2雙線圈電磁閥來設計。
氣壓迴路圖如圖9-3(b)所示。
程式階梯圖如圖9-3(c)所示。
啟動時請將氣缸放至初始位置。
例題三 現有AB兩氣壓缸,請依位移步驟圖設計控制迴路。
位移步驟圖如圖9-4(a)所示。
气缸速度应该如何进行合理控制?很多客户会有疑问,除了气缸本身带有的速度调节以外,还有别的方法吗?那今天我们就为大家分享一下相关基础知识,供大家参考。
气缸速度控制回路的定义:速度控制回路就是通过控制流量的方法来控制气缸的运动速度的气动回路。
一.单作用气缸的速度控制回路(一)慢进一快退的调速回路若想实现气缸的快进一慢退,可将进气节流式调速阀改为排气节流式调速阀。
(二)双向调速回路利用双向调速阀(ASD系列)实现气缸伸缩两个方向的调速及垂直气缸的升降速度的调节。
二.从双作用气缸的速度控制回路(一)排气节流调速与进气节流调速排气节流调速与进气节流调速两个回路两种调速方式的特点:由于排气节流调速的调速特性和低速平稳性较好,故实际应用中大多采用排气节流调速方式。
进气节流调速方式可用于单作用气缸、夹紧气缸、区低摩擦力气缸和防止气缸起动时的活塞杆的“急速伸出”现象。
(二)慢进一快退调速回路电磁阀通电,受排气节流式调速阀的作用,气缸慢进。
当电磁阀断电时,经快排阀迅速排气,气缸则快退。
在换向阀与气缸距离较远时,可用此回路。
(三)快进一慢退调速回路排气节流式调速阀与快排阀对换即可实现。
(四)快进一快退调速回路排气节流式调速阀也换成快排阀即可实现。
但要注意气缸行程末端是否需要缓冲的问题及快排阀上出现结露现象。
故气缸速度不宜太快,负载也不宜太大。
(五)用排气节流阀调速回路当换向阀与气缸之间不能安装速度控制阀的场合,可在换向阀的排气口上安装带消声器的排气节流阀,用于调节气缸的运动速度。
且在不清洁的环境中,还能防止通过排气孔污染气路中的元件。
使用排气节流阀的缺陷及限制可参见元件篇中的带消声器的排气节流阀。
(六)双速驱动回路在实际应用中,常要求实现气缸高低速驱动。
下面介绍两种回路。
其一使用中间释放回路构成的双速驱动回路。
使用时应注意,如果快速和慢速的速度差太大,气缸速度在转换时,容易产生“弹跳”现象。
当气缸伸出快接近行程终端时,让3通电磁阀断电则变成慢速。
双作用气缸调速回路工作原理在工业自动化领域,气动技术以其低成本、高效率和易于维护等特点,被广泛应用于各种机械设备中。
双作用气缸作为气动系统中的重要执行元件,其调速回路的设计和工作原理对于整个系统的性能具有重要影响。
本文将深入探讨双作用气缸调速回路的工作原理,并分析其在实际应用中的优化策略。
一、双作用气缸的基本概念双作用气缸是一种能够在两个方向上产生推力和拉力的气动执行元件。
它主要由缸筒、活塞、活塞杆、前后端盖及密封件等组成。
当压缩空气从气缸的一端进入时,推动活塞向另一端移动;反之,当压缩空气从另一端进入时,推动活塞反向移动。
这种双向运动的特点使得双作用气缸在工业自动化领域具有广泛的应用。
二、调速回路的作用与重要性调速回路是气动系统中的关键部分,它负责控制气缸的运动速度。
通过调节进入气缸的压缩空气流量和压力,调速回路可以实现气缸的快速、平稳和精确运动。
这对于提高机械设备的生产效率、降低能耗和减少维护成本具有重要意义。
三、双作用气缸调速回路的工作原理双作用气缸调速回路的工作原理主要依赖于对压缩空气流量和压力的控制。
一般来说,调速回路包括以下几个关键部分:1. 气源处理元件:负责提供稳定、干燥的压缩空气,以满足气缸的工作需求。
这包括空气压缩机、储气罐、干燥器和过滤器等。
2. 方向控制阀:用于控制压缩空气进入气缸的方向。
常见的方向控制阀有二位三通阀、二位五通阀等。
通过改变阀芯的位置,可以实现气缸的正向和反向运动。
3. 流量控制阀:负责调节进入气缸的压缩空气流量,从而控制气缸的运动速度。
流量控制阀通常与方向控制阀配合使用,以实现气缸在不同方向上的速度调节。
常用的流量控制阀有节流阀和调速阀等。
节流阀通过改变阀口的通流面积来调节流量,而调速阀则能在负载变化时保持稳定的流量输出。
4. 压力控制元件:用于监测和调节气缸的工作压力。
这包括压力表和压力开关等。
当气缸的工作压力过高或过低时,压力控制元件可以发出信号或切断气源,以保护气缸和整个气动系统免受损坏。
气动教程:电气动回路
1029人阅读| 0条评论发布于:2009-5-15 15:03:00
一、双作用气缸直接控制回路(单电控)
按下按钮开关,气缸的活塞杆向前伸出;松开按钮开关,活塞杆回复到气缸的末端。
二、双作用气缸间接控制回路(双电控)
按下按钮开关,气缸的活塞杆向前伸出;松开按钮开关,活塞杆回复到气缸的末端。
三、双作用气缸逻辑“与”控制回路(直接控制)
按下两个按钮开关,气缸活塞向前伸出;松开一个或两个按钮开关,活塞杆回复到气缸末端
四、双作用气缸逻辑“或”控制回路(间接控制)
任意按下一个按钮开关,气缸活塞向前伸出;松开这个按钮开关,活塞杆回复到气缸末端。
五、双作用气缸自锁回路(断开、导通优先)
按下一个按钮开关,气缸活塞向前伸出;按下另一个按钮开关,则气缸活塞杆回到初始位置。
若同时按下两个按钮,气缸的活塞杆不动(断开优先)。
若同时按下两个按钮,气缸的活塞杆仍向前伸出(导通优先)。
六、双作用气缸往返运动控制回路(行程开关)
按下控制开关,气缸活塞杆作往返运动;再按一次这个控制开关则停止运行。
七、双作用气缸往返运动控制回路(非接触)
按下一个按钮开关,气缸活塞杆往返运动;按下另一个开关则停止运行。
八、双气缸的顺序控制回路
1.按一下按钮开关S1,气缸1活塞杆向前伸出把盒子往前推至气缸2正下方;
2.当气缸1活塞杆到达1B2时,气缸2的活塞杆向下伸出,在盒子上盖章;同时气缸1回缩复位至1B1;
3.气缸2活塞杆到达2S2盖完章后,自动回缩复位。
九、双缸时间控制回路
1. 静止状态下,气缸1活塞杆回缩在末端,气缸2活塞杆伸出。
2. 按下一个按钮开关,气缸1活塞杆向前伸出,同时气缸2的活塞杆回缩复位;3s后,气缸1的活塞杆回缩复位,同时气缸2活塞杆向前伸出。
2s后,气缸1活塞杆再次向前伸出,同时气缸2的活塞杆回缩复位,如此往复。
3. 再次按下按钮开关,气缸运动停止。
十、双气缸的计数控制回路
1. 按一下按钮开关S1,气缸1活塞杆自动往返,计数器计算;
2. 当计数器计气缸1往返2次后,气缸2向下自动往返1次,计数器复位,如此往复…
3. 再按一下按钮开关S1,气缸1和气缸2停止运动。