基于S3C2440A的车载GPS导航系统的设计
- 格式:pdf
- 大小:366.31 KB
- 文档页数:4
基于S3C2440A的车载GPS导航系统的设计
侯志宁;王宗强;岳有军;宗群
【期刊名称】《天津理工大学学报》
【年(卷),期】2010(026)003
【摘要】车载GPS导航系统是在GPS基础上发展起来的一门新型技术,具有定位、测速、导航和语音提示等功能.介绍了车载GPS导航系统的结构及系统设计采用的目标平台,基于S3C2440A嵌入式处理器和SDT11 GPS模块设计了系统的硬件.在Windows CE嵌入式操作系统上设计串口通信软件完成了GPS信息的接收;然后对GPS数据输出协议进行了介绍,并根据此协议利用EVC编程完成了GPS信息的处理,实现了定位功能.在此基础上嵌入电子地图实现了导航功能,最终设计完成了车载GPS导航系统.
【总页数】4页(P23-26)
【作者】侯志宁;王宗强;岳有军;宗群
【作者单位】天津大学,电气与自动化工程学院,天津,300072;天津大学,电气与自动化工程学院,天津,300072;天津大学,电气与自动化工程学院,天津,300072;天津理工大学,自动化学院,天津,300384;天津大学,电气与自动化工程学院,天津,300072
【正文语种】中文
【中图分类】TP368
【相关文献】
1.基于WINDOWS CE的车载GPS导航系统的设计探索 [J], 唐国梅
2.车载GPS导航系统的设计 [J], 张勤;赵珊;张立芬
3.基于S3C2440A和Win CE的嵌入式导航系统设计 [J], 王庞伟;夏路易
4.基于DSP的车载GPS/DR组合导航系统硬件设计 [J], 杜萌;付梦印;王美玲
5.基于DSP的车载GPS/DR组合导航系统硬件设计 [J], 杜萌;付梦印;王美玲因版权原因,仅展示原文概要,查看原文内容请购买。

基于S3C2440A和Win CE的嵌入式导航系统设计作者:王庞伟,夏路易来源:《现代电子技术》2009年第12期摘要:卫星导航系统现已渐渐成为人们日常生活的一部分。
介绍基于ARM920T内核的微处理器S3C2440A和Win CE 5.0操作系统实现嵌入式导航系统设计。
重点讲述UART接口的iTra300芯片在系统中实现GPS定位和导航的方法,最终设计结果已满足日常需要。
这里将UART接口芯片用于GPS接收,大大降低了系统设计难度,提高了定位精度。
关键词:嵌入式导航系统;S3C2440A;Win CE5.0;iTrax300;GPS;ARM920T中图分类号:TP271+.5文献标识码:B文章编号:1004-373X(2009)12-031-02Design of Embedded Navigation System Based on S3C2440A and Win CEWANG Pangwei,XIA Luyi(Taiyuan University of Technology,Taiyuan,030024,China)Abstract:Nowadays,navigation system has became one part of our daily life.The thesis introduces the design of embedded navigation system based on S3C2440A with the kernel of ARM920T and the embedded operating system of Win CE 5.0.The Method of orientation and navigation with theiTra300 of UART interface is introduced,the results meet the need of daily life.Application of the chip with UART interface lowers the difficulties of design and improves the precision of orientation.Keywords:embedded navigation system;S3C2440A;Win CE5.0;iTrax300 GPS;ARM920T如今,随着人们现代化生活节奏的加快和当今城市化速度的不断膨胀,迫使越来越多的人必须在紧凑的时间及地点进行工作,不仅导致交通网络日益复杂,也使人们必要的移动性越来越呈频繁趋势,这使得每个人对空间信息有了更多的依赖,迫切要求导航系统走入每个人的生活。

基于ARM和Linux的GPS信息采集与处理系统设计GPS信息的采集和处理是电子导航装置的重要组成部分,通过建立交叉编译环境,以ARM处理器S3C2440A和Linux操作系统作为软硬件平台并采用GS87模块,分析NMEA-0183通信协议,研究GS87模块同ARM平台进行串行通信和串口编程问题,设计了GPS信息采集与处理系统,通过查询是否是GPRMC 语句来提取和分离有用信息并进行相应转化。
最后的实验证明,该系统得到的数据能够满足定位需求,具有较好的实用价值。
标签:ARM处理器Linux GS87模块GPS信息一、引言早在80年代,美日欧等国家就开始研制以导航、查询为主要功能应用的数字化电子地图。
电子导航装置于90年代开始用到汽车上,用户利用GPS等装置,可以在一定精度下实现车辆定位。
Linux操作系统具有开源免费、稳定、移植性好等优点,而ARM嵌入式处理器作为一种性能高、功耗低的精简指令集芯片,已广泛应用于车载导航、GPS定位、掌上PC等消费电子产品领域[1]。
本文通过分析NMEA-0183通信协议,他是GPS导航设备的RTCM(Radio Technical Commission for Maritime services)标准协议,分析它的内容和格式,研究GPS模块GS87同ARM平台之间串行通信问题,设计GPS信息采集与处理系统,通过建立交叉编译环境串口编程,实现在ARM和Linux环境下GPS信息采集与处理。
二、NMEA 0183通信协议NMEA 0183通信协议是美国国家海洋电子协会为海用电子设备制定的一种标准格式,目前业已成了GPS导航设备统一的RTCM标准协议。
该协议采用ASCII码,其串行通信默认参数为:波特率=4800bps,数据位=8bit,开始位=1bit,停止位=1bit,无奇偶校验[2]。
报文格式如下图1所示:图1 NMEA报文格式$—帧命令起始位;GPccc—地址域,前两位为识别符,后三位为语句名;ddd…ddd—数据;*—表示串尾,校验和前缀;hh—校验和(check sum),即$与*之间所有ASCII码类型字符的校验和;—CR(Carriage Return)+LF(Line Feed),表示帧结束,回车和换行。

基于ARM 嵌入式GPS 导航系统软硬件设计一、硬件实现本嵌入式GPS 导航系统的硬件核心是三星公司 arm9系列中的16/32位RISC 处理器S3C2410A 芯片,该芯片强大的实时处理能力和丰富的外围接口非常适合 嵌入式系统的开发,本系统正是基于该芯片的这些特点而设计的。
系统框图如图 1所示。
该系统以S3C2410A 微处理器为核心,与2片32M 的SDRAM (HY57V561620CT ) 和一片64M 的NAND Flash (K9F1208U0B 组成了最小系统。
外部添加了用于接收 GPS 信号的GPS 模块,用于显示的液晶面板以及一片 UDA134仃S 勺声音芯片。
此 外,为了调试的方便,我们还增加了一片CS8900A 勺10M 网卡芯片。
Kcyboatd 特扩充 KPF120SUOB 64M Naud FlashHY57V561620CT 32M SDRAM X 2图1系统框图二、系统平台的建立系统平台的建立主要包括两部分,即宿主机( 交叉编译器工具链的建立。
PC 机上的操作系统可以有多种选择:安装 Linux 发行版、在 Windows 下使 用虚拟机或者使用Cygwin 。
由于现今Microsoft Windows 统领着全球超过半数 的PC 机(在中国Windows 占据近90%勺份额),许多开发者开始使用虚拟机等 手段来实现在 Windows 平台下进行嵌入式Linux 的开发,但这些方法都会或多或 少地带来些兼容性问题。
开发嵌入式Linux 最好的选择便是在PC 机上安装Linux 发行版,因为这样与Windows 毫无关联,可占有系统全部资源,拥有系统最高性 能和最佳的兼容性。
在建立交叉编译器工具链方面必须注意一点的便是C 运行库的选择。
现在可供选择的C 运行库有glibc, uClibc 以及newlib 等。
glibc 是由GNU 项目提供RESET复位电路 CSS900A EthenittUDA1341TS IIS 音频接口 SD-Caid 待扩充TFT LTD 640x450UDA^?'IT ;PC 机)上操作系统的选择和S3C2410A RISC 微处理器 ARM920T 内梳RS 器2 UART GPS 複块RS-232 UART 上位机通信 USB Host 駅标接口的标准C运行库,它针对PC应用设计,较庞大,但能提供最优的兼容性。

《基于S3C2410的北斗卫星定位终端的设计与实现》篇一一、引言随着科技的飞速发展,卫星定位技术在人们的日常生活中扮演着越来越重要的角色。
北斗卫星定位系统作为我国自主研发的全球卫星导航系统,其应用领域日益广泛。
S3C2410作为一种常用的嵌入式处理器,具有高性能、低功耗等优点,非常适合用于北斗卫星定位终端的设计。
本文将详细介绍基于S3C2410的北斗卫星定位终端的设计与实现过程。
二、系统设计1. 硬件设计系统硬件设计主要包括S3C2410处理器、北斗卫星接收模块、电源模块、存储模块等。
S3C2410处理器作为核心部件,负责整个系统的控制与数据处理。
北斗卫星接收模块用于接收卫星信号,是定位的关键部分。
电源模块为整个系统提供稳定的电源保障,存储模块则用于存储定位数据和系统参数。
2. 软件设计软件设计包括操作系统、驱动程序、应用程序等。
操作系统采用嵌入式Linux,具有较好的稳定性和兼容性。
驱动程序负责与硬件设备进行通信,实现数据的读取和写入。
应用程序则是用户与系统交互的接口,包括定位、导航、数据传输等功能。
三、关键技术实现1. 卫星信号接收与处理北斗卫星定位终端的核心是卫星信号的接收与处理。
通过S3C2410处理器的GPS模块,实时接收北斗卫星信号,并进行数据处理,最终实现定位。
在信号处理过程中,需要采用滤波、解调等技术,以提高信号的信噪比和准确性。
2. 数据传输与存储数据传输与存储是北斗卫星定位终端的重要功能之一。
通过无线通信技术,将定位数据传输至服务器或手机等设备。
同时,系统还需要具备本地存储功能,以便在无网络环境下保存定位数据。
在数据传输过程中,需要保证数据的可靠性和安全性。
四、实验与测试为了验证基于S3C2410的北斗卫星定位终端的设计与实现效果,我们进行了大量的实验与测试。
实验结果表明,该终端具有良好的定位精度和稳定性,能够实时接收和处理北斗卫星信号,实现快速定位。
同时,该终端还具有较低的功耗和较高的可靠性,满足了实际应用的需求。

基于S3C2440的车载导航系统硬件设计的开题报告1. 研究背景随着汽车行业的不断发展,车载导航系统已经成为了汽车智能化的一个必要组成部分。
在车载导航系统中, CPU模块是不可缺少的一个组成部分。
目前,常用的 CPU模块包括树莓派、 Tinker board、 ARM 等。
本文将以 S3C2440 为基础,设计车载导航系统的 CPU模块,结合其他组件,可以实现整个车载导航系统的功能。
2. 研究目的本文的目的是基于 S3C2440 开发板,设计一个适用于车载导航系统的 CPU模块。
该 CPU模块可以完成车载导航系统的基本功能,如地图显示、路线规划等。
同时,该 CPU模块还可以通过其他组件与汽车控制系统进行通信,实现更多高级功能,如语音提醒、车辆信息显示。
3. 研究内容(1)S3C2440 开发板S3C2440 开发板是一款基于 ARM9 内核的 CPU模块开发板,具有多种外设、高速外设接口等特点。
本文将以该开发板为基础,设计车载导航系统的 CPU模块。
(2)软件开发基于S3C2440 开发板的CPU模块的软件开发包括嵌入式操作系统、Linux 驱动程序以及上层应用程序的编写。
本文将采用嵌入式操作系统来实现 CPU模块的基本功能,如系统启动、硬件初始化等。
(3)车载导航系统的功能实现本文将实现车载导航系统的基本功能,如地图显示、路线规划等。
同时,还将通过其他组件,如 GPS 模块、蓝牙模块与汽车控制系统进行通信,实现更多高级功能。
4. 预期成果本文将设计一个基于 S3C2440 开发板的 CPU模块,该 CPU模块可以完成车载导航系统的基本功能,如地图显示、路线规划等。
同时,还可以通过其他组件,如 GPS 模块、蓝牙模块与汽车控制系统进行通信,实现更多高级功能。
完成该 CPU模块的设计后,可以与其他组件组合成一个完整的车载导航系统。
基于S3C2440的GPS导航终端机的设计本文介绍了一种利用ARM9 开发板和GPS 模块实现GPS 导航功能的终端机的软硬件结构和设计方法。
1 GPS 导航系统结构本文所介绍的GPS 全球定位导航系统按功能可分为嵌入式主控模块、GPS 模块、显示模块、扩展模块及供电模块等五大部分。
嵌入式主控模块基于S3C2440 处理器,主要负责对GPS 导航模块数据的响应、处理和控制。
在硬件上,主控模块就是一个嵌入式开发板,包括触摸LCD 接口电路、SD 卡接口电路、FLASH、SDRAM 等。
而在软件上,主控模块上应当运行嵌入式Linux 系统。
而嵌入式Linux 操作系统的主要作用是管理程序模块进程并调度进程等。
GPS 模块主要用于接收导航卫星数据,并以特定的格式发送给主控模块。
显示模块可选用3.5 寸TFT 带触摸屏LCD,主要用于与用户进行交互。
扩展模块主要指的是SD 卡。
供电模块主要为系统正常工作提供电源。
图1 所示是该系统的结构图。
2 GPS 数据的提取GR-87 型GPS 模块的输出语句遵循NMEA-0183 标准。
该标准的语句都是以$开始,以CRLF 结束。
$之后是5 字符地址,头两个字符为发送者识别码(GPS 为GP),后3 位为语句名称。
定位信息中的数据由,来划分。
GPS 模块一般每秒可以输出一次NMEA-0183 格式语句。
在导航系统中,一般只需要用到时间、日期、经纬度、速度。
而由于RMC 语句完整包含了系统所需的上述信息,因此。
只需要对RMC 语句进行提取即可。
图2 所示是对GPS 数据进行提取的具体流程。
昼应用技术基于S3C2440的嵌入式导航平台的设计与实现木刘建圻1曾碧1郑秀璋1钟碧良2(1.广东工业大学计算机学院2.广州航海高等专科学校)摘要:文章基于AltM3c2440讨论了嵌入式船舶导航系统解决方案,构建了船舶高性价的导航嵌入式终端平台。
介绍了硬件的设计、B00tloader的设计、lin畎内核的移植和图形库QTE的移植,同时也介绍了在此平台下实现船舶导航的应用程序框架结构与实现结果。
将全球卫星定位技术、无线通信技术、嵌入式系统技术融合在一起,实现了具有船舶导航功能的嵌入式平台系统。
关键词:嵌入式系统;船舶导航:QT/embedded移植;linll)【移植1引言现在通用的流行的导航系统嵌入式平台一般有单片机系统平台、基于mtM7的嵌入式平台,基于ARM9S3C2410的嵌入式平台。
单片机电子海图应用系统信息处理能力弱、资源有限,现很少使用。
基于A。
RM7的嵌入式平台资源比单片机系统要丰富一些,支持操作系统,在过去的定位系统中用得很多,但对复杂的图形界面,删7存在缺陷。
现很多导航产品都采用基于删9S3C2410的嵌入式平台,删9通过提高时钟频率、改进指令周期、增加内存管型|1,在性能上比√6dtM7有很大提高,通过移植操作系统、图形库和触摸屏驱动能实现友好的人机交互界面,能完成一般的导航任务。
由于S3C2410主频是203MHz,在运行导航系统时,在路径规划时等待时间过长。
所以,以上三种嵌入式平台都不能满足当前嵌入式导航系统的要求,迫切需要一种新的设计方案。
2终端设计方案嵌入式导航系统是一个复杂的系统,要求界面友好,响应速度快,海图显示连贯。
整个系统主要实现三大部分的功能,接收人卫星定位信息,与控制中心实时通信,导航管理与异常处型21。
根据导航实际需求,搭建平台时主要考虑以下几点:(1)必须要有运算速度快的cPU和大容量的内存支持;(2)必须要有丰富的图形库支持;木基金项目:广东省自然科学基金项目(编号05001801):广东省科技计划项目(编号2006b37202007)资助(3)通信必须实时在线。
GPS车载导航系统的设计施文灶;王平【摘要】GPS车载导航系统融合了车辆、交通、计算机、通信、系统科学等领域的相关技术,逐渐成为交通导航的重要工具。
本设计以处理器为S3C6410A的开发板作为开发平台,采用Linux作为嵌入式操作系统,选用GPS模块GR-87采集GPS数据,对GPS车载导航系统的方案进行论证,介绍了GPS数据的获取、电子地图的生成和显示。
以福建师范大学校园为实测环境,实现实时定位、动态路径规划等功能。
%GPS car navigation system which combined relatedifleds such as vehicles, transportation, computer, communication and systems science has gradually become an important tool for trafifc navigation. The design uses development board based on S3C6410A pro-cessor as a development platform, adopts Linux as an embedded operating system, selects GPS module GR-87 to collect GPS data. It dem-onstrated the design program for GPS car navigation system, GPS data acquisition, generation and display of the electronic map. This design uses Fujian Normal University as the measured environment, and achieves the function of real-time positioning and dynamic path planing.【期刊名称】《软件》【年(卷),期】2014(000)004【总页数】5页(P32-36)【关键词】GPS;导航;Linux;电子地图【作者】施文灶;王平【作者单位】福建师范大学光电与信息工程学院,福建福州 350117;福建师范大学光电与信息工程学院,福建福州 350117【正文语种】中文【中图分类】TP24本文著录格式:[1]施文灶,王平. GPS车载导航系统的设计[J].软件,2014,35(4):32-361.1 系统功能目前关于GPS/GIS的研究已成为一个热点主题,并得到迅猛的发展,地图数据公司崛起,导航软件推陈出新,往嵌入式发展的趋势已经很明显[1]。
基于S3C2410嵌入式车载定位系统设计Design of embedded vehicle navigation system based on S3C2410(南京师范大学)刘国锦 刘新霞 时斌 朱晓舒LIU Guo-jin LIU Xin-xia SHI Bin ZHU Xiao-shu 摘要:本文从实际应用出发,为嵌入式Linux在车载GPS导航定位系统中的应用研究提供了一种新的设计思路。
以ARM处理器S3C2410为硬件核心,在嵌入式Linux操作系统的平台上,基于GPS卫星定位原理,在构建了最小系统的基础上,实现导航定位的功能,设计了LCD显示、GPRS模块等接口电路,完成了车辆定位的系统设计。
结合GIS技术创新地运用MiniGUI 和MGIS控件,实现了电子地图和定位信息的显示,及车辆实时跟踪和远程监控。
关键词:S3C2410;Linux;GPS;GPRS;MGIS中图分类号:TP274 文献标识码:BAbstract:From the viewpoint of practicality application,the paper offers a new design idea for the embedded Linux progress in the vehicle GPS navigation system. By the theory of GPS planet orientation, the paper discusses the s3c2410 based on Linux software platform and it’s peripheral circuits,LCD display circuit,GPRS module interface circuit. Combine with GIS technology,the paper innovatory use the MGIS which is a widget of MiniGui,and has been achieved to show the orientation message on the electronic maps,which can track and telecommuting the vehicle in time. Keywords: S3C2410;Linux;GPS;GPRS;MGIS1 前言随着我国城市建设规模的扩大,车辆日益增多,交通运输的管理和合理调度已成为一个广泛关注的问题。
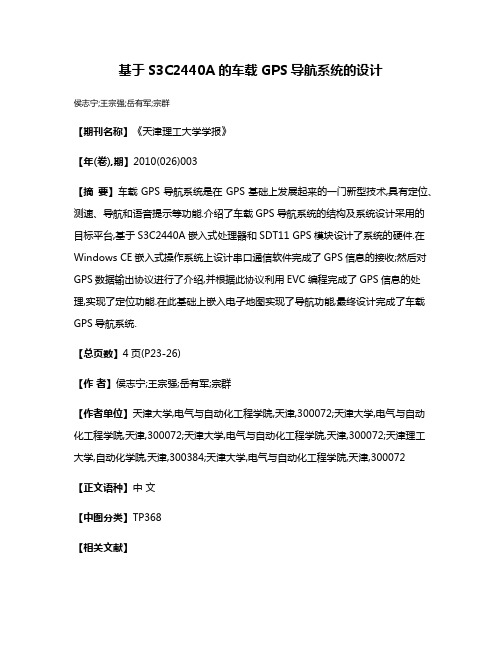
文章编号:16732095X (2010)0320023204基于S3C2440A 的车载GPS 导航系统的设计侯志宁1,王宗强1,岳有军1,2,宗 群1(1.天津大学电气与自动化工程学院,天津300072;2.天津理工大学自动化学院,天津300384)摘 要:车载GPS 导航系统是在GPS 基础上发展起来的一门新型技术,具有定位、测速、导航和语音提示等功能.介绍了车载GPS 导航系统的结构及系统设计采用的目标平台,基于S3C2440A 嵌入式处理器和S DT11GPS 模块设计了系统的硬件.在W indows CE 嵌入式操作系统上设计串口通信软件完成了GPS 信息的接收;然后对GPS 数据输出协议进行了介绍,并根据此协议利用E VC 编程完成了GPS 信息的处理,实现了定位功能.在此基础上嵌入电子地图实现了导航功能,最终设计完成了车载GPS 导航系统.关键词:GPS;车载导航;S3C2440A中图分类号:TP368 文献标识码:A do i:10.3969/j .iss n.16732095X .2010.03.008D esi gn of veh i cle GPS nav i ga ti on syste m ba sed on S 3C 2440AHOU Zhi 2ning 1,WANG Zong 2qiang 1,Y UE You 2jun1,2,Z ONG Qun1(1.School of Electrical Engineering and Aut omati on,Tianjin University,Tianjin 300072,China;2.School of Electrical Engineering,Tianjin University of Technol ogy,Tianjin 300384,China )Abstract:Vehicle GPS navigati on syste m devel oped on the basis of GPS has positi oning,s peed measuring,navigating and voice p r omp ting functi ons .The structure of vehicle GPS navigati on syste m and target p latf or m of the syste m are intr oduced .The hardware of the syste m based on S3C2440A and S DT11GPS module is designed.Under W indows CE e mbedded OS write serial communicati on s oft w are t o comp lete GPS inf or mati on receiving .Then intr oduce the p r ot ocol of GPS data out put.According t o this p r ot ocolmake use of E VC p r ogra mm ing t o finish GPS inf or mati on p r ocessing,realize the functi on of positi o 2ning .Based on the above,e mbed electr onic map t o realize the functi on of navigating,then comp lete the vehicle GPS naviga 2ti on syste m.Key words:GPS;vehicle navigati on;S3C2440A1 车载GPS 导航系统的结构车载GPS 导航系统就是在GPS 基础上发展起来的一门新型技术,具有定位、测速、导航和语音提示等功能.本文介绍了车载GPS 导航系统的结构;在S3C2440A 微处理器和W indows CE 操作系统组成的嵌入式系统基础上,利用S DT11GPS 模块设计实现了车载GPS 导航系统[1].1.1 GPS 系统的定位原理GPS (Gl obal Positi oning Syste m ,全球定位系统)是以分布于全球的30颗定位人造卫星(4颗为备份卫星)为基础,具备在陆海空进行全方位实时三维导航与定位能力的新一代卫星导航与定位系统.GPS 导航系统由空间部分、地面监控部分和用户接收部分3部分构成,如图1所示.GPS 卫星不断的发送卫星讯号,用户接收到这些信号后,通过自带的CP U 计算出自身的位置、方向、速度和时间等信息.卫星向用户提供的数据中包括:卫星身份标识、自身状态、当前时间(UTC 时间)、自身坐标等.用户收稿日期:2009211204.基金项目:天津市科技计划项目(80ZCKFGX2900).第一作者:侯志宁(1986— ),男,硕士研究生.第26卷 第3期2010年6月天 津 理 工 大 学 学 报J O URNAL O F T I ANJ I N UN I VERS I T Y O F TECHNOLO GY Vol .26No .3Jun .2010图1 GPS 导航系统的构成F i g .1 Structure of GPS nav i ga ti on system部分以高速运动的4颗卫星(其中3颗用于几何定位,另1颗用于计算卫星时钟和接收时钟的钟差,以提高定位精度)瞬间位置为已知的起始数据,利用空间几何的方法进行解算,从而得到自身的准确位置信息.1.2 车载GPS 导航系统的结构车载导航系统通过接受GPS 卫星信号并配合电子地图数据,帮助用户准确定位当前位置,并且根据既定的目的地计算行程,以地图显示和语音提示两种方式引导用户行至目的地.一个完整的车载GPS 导航系统由硬件和软件两部分组成,其中硬件部分包括:GPS 模块、天线、车载CP U 、语音模块、显示模块、地图存储模块等;软件部分主要是指电子地图等.车载GPS 导航系统的结构图见图2.图2 车载GPS 导航系统结构图F i g .2 Structure of veh i cle GPS nav i ga ti on syste m1)GPS 模块主要是用来实现GPS 信号的实时接收和处理,并通过串口传输到车载CP U 中.2)天线模块主要用来接收GPS 卫星信号,将微弱的电磁波信号转化为相应的电流信号,并通过前置放大器将其放大,方便GPS 模块对这些信号进行处理.3)GPS 模块主要是用来实现GPS 信号的实时接收和处理,并通过串口传输到车载CP U 中.4)天线模块主要用来接收GPS 卫星信号,将微弱的电磁波信号转化为相应的电流信号,并通过前置放大器将其放大,方便GPS 模块对这些信号进行处理.5)车载CP U 模块是整个车载GPS 导航系统的核心,负责GPS 信号的提取及语音、显示、地图等单元的协调和管理.6)语音模块主要是指车载音响系统,通过车载CP U 的实时调用,实现语音导航.7)显示模块是指车载的液晶显示器,实时显示自车在电子地图中的位置,从而生动地显示导航和定位的效果.8)地图存储模块是用来存放导航软件和地图数据的存储器,通常使用S D 卡.2 车载GPS 导航系统的硬件设计2.1 目标平台介绍系统设计采用的目标平台为基于S3C2440A 和W indows CE 构建的嵌入式系统.其中S3C2440A 是三星公司基于AR M920T 内核开发的一款嵌入式处理器,可以移植W indow CE 、L inux 、Vx -works 等嵌入式操作系统;W indows CE 是微软开发的一个紧凑、高效和可扩展的嵌入式操作系统,它拥有多线程、多任务和完全抢占式的优先级等特性[2].目标平台的系统资源如下:1)CP U 为S3C2440A 微处理器,工作频率为400MHz;2)操作系统为W indows CE5.0;3)编程语言为e Mbedded V isual C ++4.0;4)内存为32MB ×2S DRAM;5)Flash 为64MB;6)UART 为RS232串行接口;7)地图存储为S D 卡接口;8)语音播放为音频接口;9)LCD 显示为7寸800×480分辨率的TFT .2.2 硬件电路设计硬件设计时选用的GPS 模块为S DT11,它是U -bl ox 与A t m el 公司共同开发的芯片组AT R0601+ATR0625,采用3.3V 工作电压,天线接收到的卫星信号通过RF_I N 脚进入芯片,经芯片处理后的GPS 信息通过串口输出,采用ANT OPEN DET 和ANT・42・ 天 津 理 工 大 学 学 报 第26卷 第3期SHORT DET作为通信的中断信号.S DT11的电路原理图如图3所示,具有如下工作特性:1)具有16路卫星接收通道;2)精度误差2.5m;3)支持US B和UART通信,通信波特率9600;4)支持DGPS、WAAS、EG NOS和MS AS;5)串口输出协议NME A0183、UBX、RT C M;6)工作电压3.3V,电流39mA;7)内置RTC,可由后备电池支持;8)适应环境-40到+85.硬件电路设计采用S3C2440A的UART2口与GPS模块进行通信,并采用ANT OPE N DET和ANT SHORT DET信号作为GPS状态检测信号传给S3C2440A[3].3 车载GPS导航系统的软件设计在硬件设计的基础上,要真正实现GPS定位导航,还需要必要的软件设计.车载GPS导航系统的软件设计分为两大部分,即GPS信息的接收和处理.3.1 GPS信息的接收硬件设计使用ST D11的UART接口与车载CP U 进行通信,故GPS信息的接收实质上就是串口通信. GPS信息接收的软件设计主要是进行串口通信程序设计,而串行端口在W indows CE操作系统下是作为流接口设备提供的,是作为文件来进行处理的,不能直接对端口进行操作[4].W indows CE下串口的编程可以分为:打开串口、配置串口、收发文件和关闭串口等4个步骤:3.1.1 打开串口打开串口使用的AP I函数为CreatFile(),其函数定义为[5]:HANDLE CreateFile(LPCTSTR l pFile Na me,DWORD d wDesired Access,DWORD d wShare Mode,LPSECUR I TY_ATTR I B UTES l pSecurity A ttributes,DWORD d wCreati on D is positi on,DWORD d wFlags And A ttributes,HANDLE hTe mp lateFile);由于W indows CE不支持重叠I/O,因此参数DWORD d wFlags And A ttributes必须为0.如函数执行成功,则返回目标端口的句柄.3.1.2 配置串口串口的配置是通过改变DCB(Device Contr ol B l ock,设备控制块)的成员变量值(波特率、停止位、数据位长度、校验位、流量控制等)和设置超时值来实现的.首先通过Get CommState()函数获得当前打开串口的配置信息,然后根据需要修改DCB成员值,再用Set CommState()函数设置新的串口配置.本串口的配置信息为:波特率9600,数据位为8位,停止位为1位,无奇偶校验位.在对于串口的读写过程中还需要考虑超时问题,如果在指定的时间内没有读到或者没有写入指定数量的字符,那么串口操作将会主动退出.这通过改变COMMTI M EOUTS结构体的设置来实现.在读写串口之前,需要用Set CommMask()函数设置事件掩模来监视指定通信端口;用W ait Com2 mEvent()函数来等待事件发生,W ait CommEvent()函数一直阻塞,直到串口上发生Set CommMask()函数设置的通信事件为止.3.1.3 读写串口在车载GPS导航系统中,串口通信主要是对串口信息的读取操作,直接调用系统AP I函数ReadFile ()即可实现数据的读取.3.1.4 关闭串口调用系统AP I函数Cl oseHandle()可完成关闭串口的操作.3.2 GPS信息的处理系统采用NMEA0183协议作为S DT11模块的数据输出.NME A0183协议是由美国国家海洋电子协会制定的一套通信协议,为不同的GPS导航设备提供了统一的BT C M(海事无线电技术委员会)标准.NME A0183协议定义了多组表示不同含义的帧语句,每帧都包括帧头、帧内数据和帧尾,均以ASC II 码的形式表示,直观、易于识别和提取.NME A0183协议中不同的帧语句以不同的帧头来标识,常用的有“$GPGG A”、“$GPG LL”、“$GPGS A”和“$GPR MC”等.本系统所关注的经纬度、速度、时间、卫星数目和定位状态等信息均可以从“$GPGG A”帧中得到.因此当接收到一条完整的NE MA0183语句后,应当先截取一段完整的“$GPGG A”帧语句,然后再提取帧数据中不同位置的不同信息.图3是此过程的流程图.依据GPS信息处理流程图,在嵌入式操作系统W indows CE下使用E VC编程实现对GPS导航信息・52・2010年6月 侯志宁,等:基于S3C2440A的车载GPS导航系统的设计图3 GPS 信息处理流程图F i g .3 Flowchart of GPS i n for ma ti on processi n g数据的提取、保存及在人机交互界面上显示[6].图5是车载导航系统GPS 定位信息的显示界面,左侧是GPS 端口的配置信息,右侧为GPS 定位信息的显示.图4 GPS 端口配置及信息显示界面F i g .4 I n terface of GPS port conf i gura ti onand m ess age d ispl ay 到现在仅仅是实现了GPS 导航系统的定位功能,若要完成导航、路径规划等功能,还需要嵌入GPS 电子地图.本设计采用凯立德公司最新推出的电子地图,将电子地图嵌入系统后进行必要的设置可实现导航、路径规划等功能.4 结束语采用车载GPS 系统实现导航,用户无需暴露给卫星任何自身的位置、速度等个人信息,具有一定的隐蔽性,同时也无需支付任何费用给GPS 导航系统,因此具有十分广泛的市场前景.本文基于S3C2440A 和W indows CE 组成的嵌入式系统,利用S DT11GPS 模块完成了车载GPS 导航系统的设计.系统经过运行测试,实现了定位、路径规划、导航和语音提示等功能,运行稳定、可靠.参 考 文 献:[1] 王庞伟,夏路易.基于S3C2440A 和W in CE 的嵌入式导航系统设计[J ].现代电子技术,2009,32(12):31232.[2] 何宗键.W indows CE 嵌入式系统[M ].北京:北京航空航天大学出版社,2006.[3] 张永强,张永健.嵌入式GPS/GPRS 车载定位技术研究[J ].仪器仪表学报,2007,28(4):2912294.[4] 谭力宁,芦利斌,金国栋,等.基于W indows CE 的GPS串行通信的实现[J ].微计算机信息,2009,25:40241.[5] 汪 兵.W indows CE 嵌入式高级编程及其实例详解[M ].北京:中国水利出版社,2008.[6] 汪 兵,李存斌,陈 鹏.E VC 高级编程及其应用程序开发[M ].北京:中国水利出版社,2005.・62・ 天 津 理 工 大 学 学 报 第26卷 第3期。