关于床椅一体化护理床抬背机构运动分析与滑移补偿探讨
- 格式:docx
- 大小:68.48 KB
- 文档页数:4
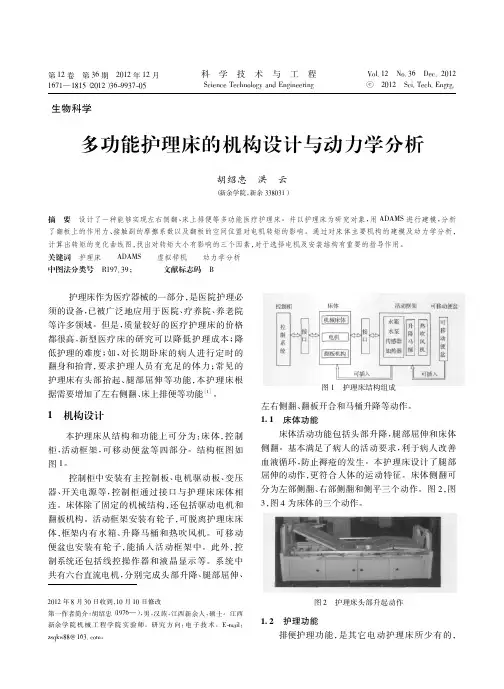
多功能护理床机构设计及仿真作者:冯健包仁人来源:《中国新技术新产品》2019年第06期对护理床的抬背机构建造模型,然后利用软件MATLAB对抬背运动状态进行仿真。
通过力学理论进行力学计算,分析床板在运动状态下的角速度,角加速度及背部摩擦力对患者舒适度的影响,仿真得出的结果满足了设计需求,验证了方案可行性。
关键词:护理床;抬背机构;仿真中图分类号:TH132 文献标志码:A0 引言随着老龄人口和无法自理人士的持续增加,护理问题逐渐突出,特别近几年来由于床位的不足和护理人士的不够,使得人们对医疗护理类产品的需求也越来越大。
在我国,由于技术水平起步晚,护理床的普及率和技术水平相比发达国家还存在一定差距,目前国内市场上的护理床较多,但普遍关注功能型,舒适性的护理床还是比较少,抬背机构作为护理床的最主要功能之一,可以帮助长期卧床的老人和患者改变坐姿,以防止关节坏死及肌肉萎缩。
该公司已经研发了一种护理床,对抬背机构重新设计,提供了一种更符合人体工程学的抬背方式。
通过对抬背机构的建模及运动学仿真,提高了机构运动性能,为护理床的研发提供验证了设计的可行性,保证了机构运动的安全性及舒适性。
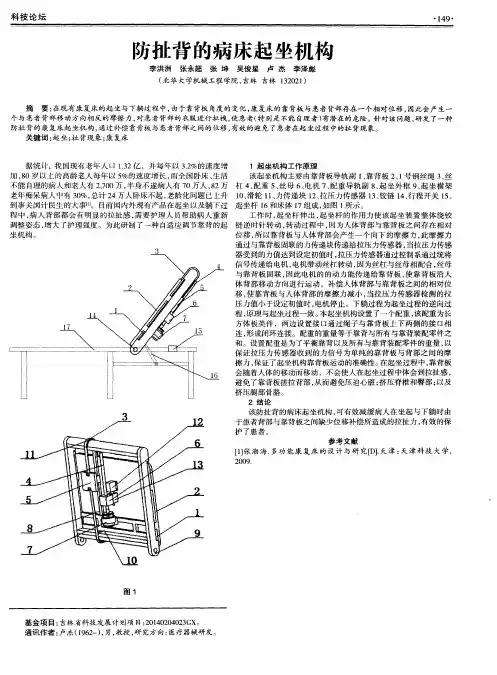
1 抬背机构的设计分析护理床的抬背机构简图如图1所示,该机构由多连杆和一个电动推杆驱动,为八杆单自由度平面机构。
选取滑块作为原动构件,即可确定机构运动的仿真。
该抬背机构可以弥补传统抬背方式的背压感。
抬背时,病人背部会有一定程度地上升,背板逆时针转动的同时也会向上抬起,即背板有一个左上方運动趋势,这样抵消了背部相对抬背板向下的滑移,减轻了病人背部相对于背板的摩擦力,使病人的背部更加舒适,不再具有压迫感,更符合人体工程学。
2 运动模型的建立3 运动学仿真在MATLAB软件中进行编程绘制机构的运动参数图,电动推杆根据负载不同,推进速度也不同,这里把推杆看作匀速运动,取速度V=15 mm/s,DA=368 mm,CA=54 mm,EF=550 mm,DA的运动范围在283°~352°,θ1+θ2+2°图2为杆DF的角速度图。
床椅分离式多功能护理床的抬背机构设计及其仿真张华;寇元金;刘继忠;祝顺风【摘要】A carry back mechanism of detachable multifunctional nursing bed was designed and accomplished the simulation analysis. Based on the function and overall layout requirements,a suitable scheme was selectedfor the carry back mechanism and using SOLIDWORKS software built institutions model. On the basis of mechanical principle knowledg calculated for institutions motion,then chosen the suitable way of driving,using MATLAB soft-ware simulated the motion state of mechanism,simulation results basically were achieved the expected design re-quirements,which has verified the feasibility of the design.%设计了一种床椅分离式多功能护理床的抬背机构并对其仿真分析。
基于可分离式护理床所需功能及整体布局要求,选择合适的抬背机构方案,运用SOLIDWORKS软件建立起了机构的模型。
运用机械原理知识对机构进行了运动计算,选择了合适的驱动方式,采用MATLAB软件编程对机构的运动进行了仿真,仿真结果基本达到了预期的设计要求,验证了该机构设计方案的可行性。
多功能床椅一体化助老机器人机械系统设计与实现
董绪斌;刘晓飞;周小龙;罗春阳;李建永
【期刊名称】《北华大学学报:自然科学版》
【年(卷),期】2022(23)1
【摘要】提出一款操作简便、功能丰富的床椅一体化助老机器人,对机械系统进行设计与实现.根据老年人实际需求规划机器人总体结构及主要机构.为满足实际应用需要,对关键机构及零件进行运动学分析和有限元分析,从理论上验证设计的可行性;详细设计各模块机械结构,完成样机搭建与调试,并优化关键机构,验证该助老机器人机械系统的可靠性和实用性.研究结果可为床椅一体化助老机器人研发提供技术基础与开发平台,为实现多功能助老服务机器人集成化、实用化提供有效解决途径.【总页数】7页(P126-132)
【作者】董绪斌;刘晓飞;周小龙;罗春阳;李建永
【作者单位】北华大学机械工程学院
【正文语种】中文
【中图分类】TP242
【相关文献】
1.多功能一体化床椅
2.床椅一体化多功能护理床——实现卧床老人生活自理的梦想
3.新型智能床椅一体化机器人设计
4.4WD-4WS型床椅一体化机器人室内定位与点镇定控制研究
5.4WD-4WS型床椅一体化机器人室内定位与点镇定控制研究
因版权原因,仅展示原文概要,查看原文内容请购买。

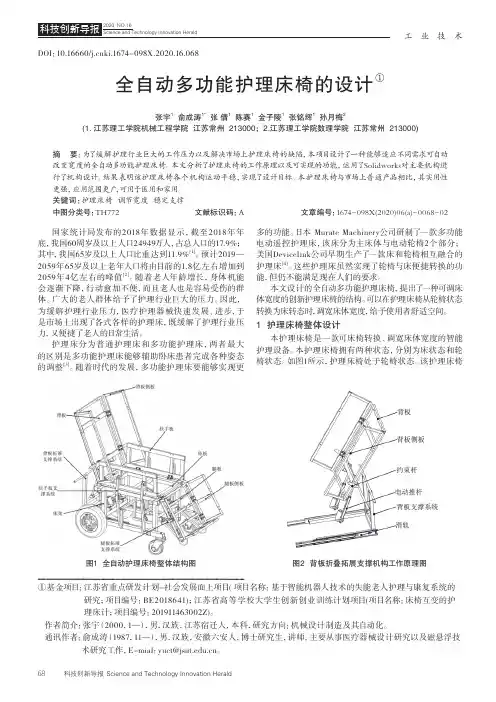
工业技术科技创新导报 Science and Technology Innovation Herald68DOI:10.16660/ki.1674-098X.2020.16.068全自动多功能护理床椅的设计①张宇1 俞成涛1* 张 倩1 陈赛1 金子陵1 张铭辉1 孙月梅2(1. 江苏理工学院机械工程学院 江苏常州 213000;2.江苏理工学院数理学院 江苏常州 213000)摘 要:为了缓解护理行业巨大的工作压力以及解决市场上护理床椅的缺陷,本项目设计了一种能够适应不同需求可自动改变宽度的全自动多功能护理床椅。
本文分析了护理床椅的工作原理以及可实现的功能,运用了Solidworks对主要机构进行了机构设计。
结果表明该护理床椅各个机构运动平稳,实现了设计目标。
本护理床椅与市场上普通产品相比,其实用性更强,应用范围更广,可用于医用和家用。
关键词:护理床椅 调节宽度 稳定支撑中图分类号:TH772 文献标识码:A 文章编号:1674-098X(2020)06(a)-0068-02①基金项目:江苏省重点研发计划-社会发展面上项目( 项目名称:基于智能机器人技术的失能老人护理与康复系统的研究;项目编号:BE2018641);江苏省高等学校大学生创新创业训练计划项目(项目名称:床椅互变的护 理床计;项目编号:201911463002Z)。
作者简介:张宇(2000,1—),男,汉族,江苏宿迁人,本科,研究方向:机械设计制造及其自动化。
通讯作者:俞成涛(1987,11—),男,汉族,安徽六安人,博士研究生,讲师,主要从事医疗器械设计研究以及磁悬浮技 术研究工作,E-mial:*************.cn。
国家统计局发布的2018年数据显示,截至2018年年底,我国60周岁及以上人口24949万人,占总人口的17.9%;其中,我国65岁及以上人口比重达到11.9%[1]。
预计2019—2059年65岁及以上老年人口将由目前的1.8亿左右增加到 2059年4亿左右的峰值[2]。
基于人体工程学的多功能护理床抬背机构的三维模型仿真设计作者:王学龙来源:《科技视界》2018年第11期【摘要】本篇文章针对护理床的抬背机构,基于人体工程学提出了三种不同的方式来实现,并对其进行比较分析,从而选择出功能最为完善,且应用性最好的机构。
在进行多功能护理床抬背机构设计时,首先对其预期功能进行了补充和完善,并在三维软件中建立了相关模型,完成了技术可行性分析,同时根据机械设计和机械原理来实现关键参数的采集和计算,利用 MATLAB来进行机构的运动仿真,确定了机构的运行方式,为进一步分析打下了坚实的基础。
【关键词】人体工程学;多功能;护理床;抬背机构;仿真中图分类号: TS664.01 文献标识码: A 文章编号: 2095-2457(2018)11-0015-002DOI:10.19694/ki.issn2095-2457.2018.11.005【Abstract】Targeting the back-lifting mechanism of nursing beds, in this paper, the author proposed three different methods on the basis of ergonomics and analyzed the methods through comparison, thus selecting the mechanism with the most complete functions and the best practicability. Upon design of the back-lifting mechanism of a multifunctional nursing bed, the author first supplemented and improved its intended functions, and established relevant models in the 3D software to complete technical feasibility analysis; in the meantime, the author realized the collection and calculation of key parameters in accordance with mechanical design and principles of machinery. Using MATLAB for motion simulation of the mechanism, the author further determined the operation mode of the mechanism, laying down a solid foundation for the next analysis.【Key words】Ergonomics; Multifunctional; Nursing Bed; Back-lifting Mechanism;Simulation0 引言随着社会经济的不断发展和人民生活水平的显著提高,我国平均寿命较十年前已有了明显的增长,但生活成本以及教育成本的不断提升使得人口出生率呈现逐年下降的态势,低出生率和严重的人口老龄化现象是我国当前所面临的主要社会问题之一。
工业技术科技创新导报 Science and Technology Innovation Herald135DOI:10.16660/ki.1674-098X.2019.03.135半自动一体化床椅的研发冯健(新松机器人自动化股份有限公司 辽宁沈阳 110169)摘 要:针对我国老龄化的发展和失能人群的增加,对专业护理人员数量要求也日益增加,为了减轻护理人员强度,我公司已经研发了床椅一体化机器人产品,为了能更好地实现产品的系列化,又研发了一款可靠性高,成本低,安全性好半自动床椅一体化。
该床椅可实现抬背、抬腿、手动分离、床椅转换等功能,床椅结构简单,使用方便,能够解决患者在护理过程中产生的大部分问题,从而促进了国内护理行业和医疗行业的发展。
关键词:护理 研发 床椅一体中图分类号:TH132 文献标识码:A 文章编号:1674-098X(2019)01(c)-0135-021 背景近几年,应用于中老年及残障人士等护理的服务机器人发展迅速,随着老龄人口的持续增长,无法完全自理老人或者疾病造成的残障人士越来越多,他们存在不同程度的能力丧失,虽然现已有一些护理床帮助患者在床上完成一些活动,但是不能离开床。
用户急需一种多功能半自动床椅以更好地降低护理者的劳动强度,提高用户自理能力和活动能力,增强生活自信,因此需要更高技术含量的护理床来满足功能障碍群体对生活自理、自立的迫切渴求。
当前必须加以足够的重视并立即采取行动,才能够解决功能障碍群体的自主护理。
目前,养老服务缺口主要体现在两个方面:养老机构床位不足;专业护理人士数量不够,并且养老服务专业度不高。
国内外养老机构的床位数能满足老人需求的床位数均不超过10%,甚至更低。
每位护理者需照料的老人多达十几人,因此必然会造成服务质量的不足及服务效率的低下。
所以,在增加养老服务的同时也要探索寻求能够辅助并保障老人安全舒适的、利用高科技的养老模式。
国外此类的护理床价格相对昂贵,操作也比较繁琐,国内现有产品功能结构比较简单,很难适应市场需求,为了提高国内护理业服务行业,减少护理过程中产生的诸多不便,设计了一款新型半自动一体化的床椅,该床椅可帮助患者实现起身、屈膝以及移动等日常功能,患者可以通过手柄控制,调整座姿。
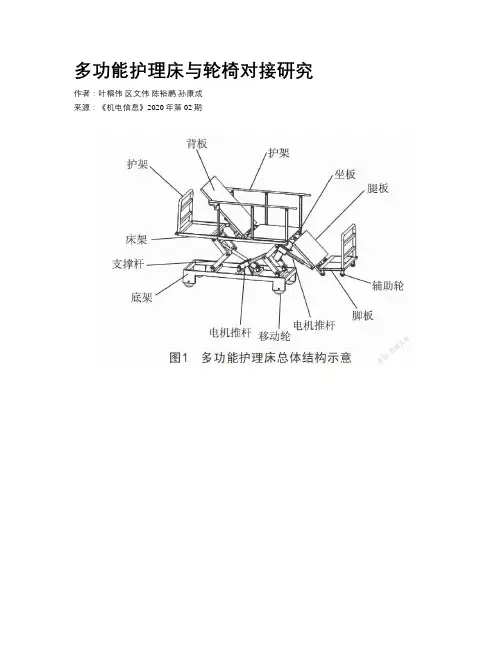
多功能护理床与轮椅对接研究作者:叶榕伟区文伟陈裕鹏孙康成来源:《机电信息》2020年第02期摘要:根据目前多功能护理床的抬背、抬腿以及整体抬升等机构存在的一些问题,进行了改进优化,同时提出了一种多功能护理床与轮椅对接的方法,消除了医护人员在护理过程中的诸多不便,促进了我国医疗保健事业的发展。
关键词:多功能护理床;床椅对接;结构设计1 研制背景及意义随着人们生活水平的提高和医疗保健行业的发展进步,人口老龄化已成为世界范围内的社会问题,高龄老人自我照顾能力减弱,对家庭、社区、政府的依赖程度加大,老年人对多功能、多样化的护理床的需求不断增加。
我国现有的护理床基本上能实现翻身、起坐、屈膝以及吃饭等主要功能,还有一种功能是可以由护理床转变为轮椅移动行走,但是这项技术还不成熟,在机械结构以及功能上仍有很大的改进优化空间。
大多数人选择购买外国进口的多功能护理床,价格昂贵,操作功能较复杂,很难得到大众化的推广应用。
因此,亟需研究一种实用价值更高的多功能护理床。
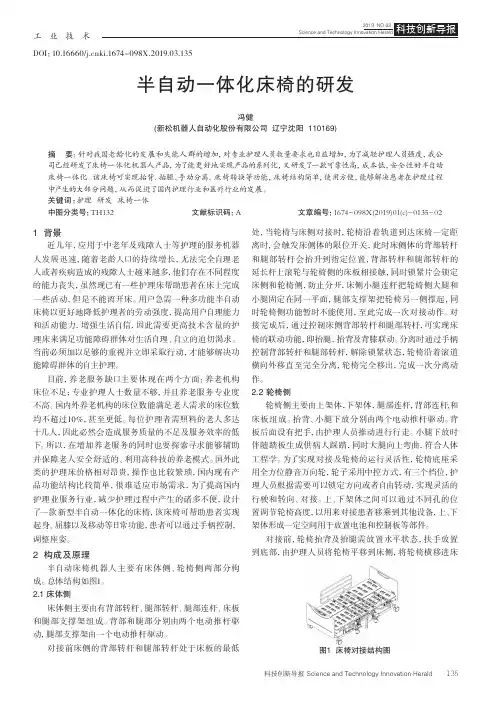
2 研究内容2.1 多功能护理床该多功能护理床主要由抬背机构、升降机构、抬腿机构、移动机构和床架整体构成,总体示意图如图1所示。
现有的护理床抬背、抬腿以及整体抬升等机构使用时仍有一些问题,例如,抬升局部受力不均匀,易侧翻,机构占用空间位置大等。
因此,整体抬升机构改用双推杆对立呈双八字型机构,且向内收缩,不但减少了占用空间,同时提升了抬升时的平稳度,抬升完成后不会产生左右水平上的位移偏差。
在抬背机构上采用双电机两侧同时抬升,解决了局部受力不均匀的问题。
抬腿机构采用双电机推杆两侧抬升,且用三根木条支撑杆支撑脚板,解决了局部受力不均匀的问题。
多功能护理床工作原理:当用户平躺在床上时,可通过遥控器控制电机推杆,实现从平躺状态转换成坐姿状态,同时通过遥控器控制电机推杆,实现腿部从平放状态转换成屈膝状态,最后可通过遥控器控制电机推杆实现整体上升,达到适宜高度。
2.2 轮椅该轮椅由普通轮椅改进而来,匹配于多功能护理床进行设计,其总体示意图如图2所示。
多功能护理床起背机构创新设计及运动分析秦帅华;赵新华;杨玉维;刘凉;姜园【摘要】Based on ergonomics,a backpart-lifting mechanism with eight member bars and one free degree is designed to eliminate the disadvantages of current backpart-lifting.The disadvantages include skin friction,easy slip of patients,blind areas of the support of waist.The kinematic models of the mechanism are modeled.By referring to ergonomic chairs,a set of complete parameters are determined.With these parameters,kinematic simulations are carried out both in MATLAB and ADAMS environment.And the comparision of kinematic graphs gotten from the simulations proves the correctness of kinematic models.Also,the validity of this design is verified by the smooth variation of curves in the graphs.The research provides references for the development of multi-functional nursing bed.%针对现在多功能护理床起背过程中存在摩擦皮肤、病人容易滑落、腰部存在支撑盲区等问题,基于人机工程学原理,设计了一种八杆单自由度起背机构,并构建了该系统运动学模型.通过参考座椅的人机工程学尺寸,选取和确定了机构完整的参数,并以此为依据,分别进行了MATLAB数值仿真和ADAMS虚拟样机的仿真,得到了各板的运动曲线图,通过比较验证了运动学模型构建的正确性;并且各板运动曲线光滑平缓,无速度、加速度突变,证明了起背机构设计的合理性.该研究可为多功能护理床的研发提供参考.【期刊名称】《天津理工大学学报》【年(卷),期】2018(034)002【总页数】6页(P1-5,11)【关键词】护理床;起背;机构设计;运动学仿真【作者】秦帅华;赵新华;杨玉维;刘凉;姜园【作者单位】天津理工大学机械工程学院天津市先进机电系统设计与智能控制重点实验室,天津300384;天津理工大学机械工程学院天津市先进机电系统设计与智能控制重点实验室,天津300384;天津理工大学机械工程学院天津市先进机电系统设计与智能控制重点实验室,天津300384;天津理工大学机械工程学院天津市先进机电系统设计与智能控制重点实验室,天津300384;天津理工大学机械工程学院天津市先进机电系统设计与智能控制重点实验室,天津300384【正文语种】中文【中图分类】TH12随着中国人口老龄化的不断加剧,多功能护理床作为一种医疗器械,被越来越多的用于医院病人的康复、家庭以及养老院失能老人的日常护理.作为护理床主要的功能之一,起背运动对改变病人身体受力点、缓解局部压迫,从而减少褥疮的发病有重要的意义[1-3].许多研究人员对此进行了研究.文献[4]设计了一种康复床的起身机构,该起身机构包括抬背机构和曲腿机构,使得病人起身后接近坐姿状态;文献[5]从三种抬背机构中选择了一种最佳构型,该构型可简化为一个导杆机构,结构简单,但仍然沿用了传统的起背方式;文献[6]设计了一种床椅分离式多功能护理床的抬背机构,该机构同样是导杆机构的变形,但实现了更高效率的传动.上述文献都对多功能护理床的起背机构进行了研究,其机构设计大同小异,存在很多重复设计之处,尤其是在起背方式的设计上没有创新,一直沿用了单块板的旋转抬背方式.这种起背方式存在摩擦皮肤、病人容易滑落、腰部存在支撑盲区等弊端.长期卧床的病人和失能老年人,局部组织受摩擦导致的剪切力,比正压力更具危害性[7].本文旨在提出一种更加人性化的起背方式,并为实现新的起背方式进行了运动机构的创新设计.通过对机构的建模、参数选取以及运动学仿真,验证了机构设计的合理性和机构建模的正确性,为多功能护理床的研发提供参考.1 起背机构的分析与设计设计的护理床起背机构如图1所示,该机构为八杆单自由度平面机构.选取滑块1作为原动件,采用一个直线电机驱动,即可实现机构运动的确定性.图1 起背机构运动简图Fig.1 Kinematic diagram of backpart-lifting mechanism由于起背完成后,座板发生了倾斜,座板对病人臀部的正压力Fn分解出一个水平分力F1,可以有效避免病人向床尾部滑落,同时也能减小臀部的摩擦力.其次,座板顺时针转动时,病人臀部、背部会有轻微的下落,可以抵消背部相对起背板向上的滑移,从而减小了病人背部的摩擦.同时,由于将起背板分成了腰部支板和背部支板,板交汇处的夹角更加平缓,减少了传统起背方式中腰部的支撑盲区,病人的腰椎得到了更充分的支撑.图2 起背机构运动学分析Fig.2 Kinematic analysis of backpart-lifting mechanism2 运动学模型的建立对于运动机构而言,出于舒适性考虑,要保证运动过程中各参数变化平稳,避免发生突变[8].如图2所示,该起背机构中,座板、腰部支板、背部支板的运动与病人身体的运动直接相关,需要对相关参数研究求解,如表1所示.表1 求解参数表Tab.1 List of study parameters名称参数座板的角位移φ9座板的角速度ω9座板的角加速度α9腰部支板的角位移φ5腰部支板的角速度ω5腰部支板的角加速度α5背部支板的角位移φ6背部支板的角速度ω6背部支板的角加速度α62.1 座板运动学分析由图2得,用复数表示为经欧拉公式展开,解得其中,式(1)两端对时间t求导,解得其中,式(1)两端对时间t求二阶导,解得其中,又有φ9= φ1+ θ4-2π,ω9= ω1,α9= α1.2.2 背部支板运动学分析同理可得到背部支板的角位移、角速度、角加速度分别为2.3 腰部支板运动学分析腰部支板的角位移、角速度、角加速度分别为其中,3 参数选取3.1 设计要求参数的确定护理床的起背功能常常与曲腿功能配合使用,以使病人由仰卧状态变为坐姿状态,从而使病人看书、就餐等更为方便[9].在起背机构设计要求参数的确定中,参照了座椅人机工程学的设计尺寸[10].选取的参数值见表2.表2 设计要求参数表Tab.2 List of designed parameters参数参数值座板最大转角10°腰部支板最大转角65°背部支板最大转角85°座板长 400 mm座板转轴与腰部支板转轴间距离 230 mm腰部支板长 300 mm背部支板长 600 mm3.2 可调参数的确定为获得机构的完整参数,对表3中的可调参数进行参数值的确定.其流程如图3所示.至此,表2和表3提供了一组机构的完整参数,为起背机构的仿真提供了数据基础.表3 可调参数表Tab.3 List of adjustable parameters参数参数值LGK初始值830 mm LKA 150 mm LGH 560 mm LHA 387 mm LCP 50 mm LCB 74 mm LBA 364 mm LCN 195 mm LNF 100 mm LFE 300 mm LDE 100 mm θ3 42.3°θ4 32.4°驱动源速度vA 10.3 mm/s驱动源加速度aA 0驱动源运动时间t 0~10 s图3 可调参数确定流程图Fig.3 The flow diagram of adjustable parameter determination4 运动学仿真4.1 MATLAB仿真与分析以表2、表3为仿真参数依据,采用MATLAB2015对起背机构进行运动学仿真,仿真结果如图5、图6、图7细实线所示.由图 5(a)、图 6(a)、图 7(a)可以看出,座板、腰部支板、背部支板的角位移变化分别为0.05~-9.96°、-0.07~65.75°、-0.19~85.64°,与表 2 中要求的最大转角间的误差不超过1°,故各板的运动行程满足设计要求;由图5~图7中各板速度、加速度曲线图可知,各板运动的角速度和角加速度变化平稳,没有突变,证明了该机构设计的合理性;图5(b)、图6(b)、图7(b)显示,座板、腰部支板、背部支板的角速度的变化范围分别为-1.185~-0.871°/s、3.156~17.379°/s、7.528~13.360°/s,其中,腰部支板和背部支板的角速度变化范围较大,且最大角速度值较高,容易造成使用者的不适感,凸显了采用匀速驱动源的弊端,这也为该机构进一步的优化设计指明了方向.4.2 虚拟样机的仿真在ADAMS软件中建立起背机构的三维模型,如图4所示.图4 ADAMS环境图Fig.4 Environment of ADAMS添加相应运动副、约束、驱动等,进行仿真.将仿真数据导入到MATLAB中,与理论计算的数据做对比,所得对比曲线图如图5、图6、图7所示.由图5~图7可以清晰的看出,ADAMS的仿真结果与MATLAB的理论模型仿真结果基本保持一致.其中,座板、腰部支板和背部支板角位移的最大误差分别为0.05,0.43,0.33°;角速度的最大误差分别为 0.002,0.254,0.115°/s;角加速度的最大误差分别为 0.000 3,0.223 7,0.129 0°/s2,两者误差值很小,验证了理论模型的正确性.图5 座板运动分析Fig.5 Kinematic graph of seat board图6 腰部支板运动分析Fig.6 Kinematic graph of waist board图7 背部支板运动分析Fig.7 Kinematic graph of back board5 结论1)从以往多功能护理床起背方式的不足着手,提出了一种新的起背方式,并设计了能够实现其功能的运动机构.新的起背运动机构减小或弥补了传统方式的不足,更加舒适可靠.2)采用解析法建立了起背机构的运动学模型,参照座椅人机工程学尺寸并借助MATLAB软件确定了一组机构完整参数.在该组参数下,利用MATLAB对起背机构进行了运动学仿真.仿真结果显示,各板角位移达到了设计要求,且无速度、加速度突变,机构设计合理.但角速度的变化范围较大,显示了采用匀速驱动源的不足.3)在ADAMS中建立了起背机构的虚拟样机,虚拟样机的仿真与理论计算结果一致性很高,验证了理论模型的正确性,为进一步的研究提供了基础.参考文献:[1]李洁,许晓云,赵玉倩.针对个体差异性的护理床人机工程设计研究[J].机械设计,2015(10):122-125.[2]高振斌,李涛,白明,等.家庭护理床的智能监控系统设计与实现[J].现代电子技术,2016,39(14):42-45.[3]周志勇,程建新,欧细凡.基于感性工学的护理床设计研究[J].包装工程,2016(12):102-105.[4]张建国,张渤海,薛强.新型护理床的起身机构设计与运动仿真[J].机械设计与制造,2009(9):19-20.[5]陈磊,朱淑云,张华,等.多功能护理床抬背机构设计与仿真[J].机械设计与制造,2013(9):94-96.[6]张华,寇元金,刘继忠,等.床椅分离式多功能护理床的抬背机构设计及其仿真[J].南昌大学学报:工科版,2015(2):137-141.[7]张建云,陶卫军,吴卫兵,等.多功能护理床结构设计研究[J].机电工程,2015,32(9):1186-1191.[8]胡绍忠,洪云.多功能护理床的机构设计与动力学分析[J].科学技术与工程,2013,12(3):9937-9941.[9]张建国,谭云丽,薛强.基于人机工程的多功能护理床设计[J].制造业自动化,2010,32(6):88-90.[10]肖艳荣.座椅舒适度与人体工程学[J].铁道车辆,1997(5):32-34.。
多功能智能轮椅背部支起机构优化设计邢坤; 程武山【期刊名称】《《轻工机械》》【年(卷),期】2019(037)005【总页数】5页(P89-93)【关键词】多功能智能轮椅; 背部支起机构; 电动推杆; 动力学仿真; 有限元分析; SOLIDWORKS软件【作者】邢坤; 程武山【作者单位】上海工程技术大学机械与汽车工程学院上海201620【正文语种】中文【中图分类】TB115.7; TB122中国是世界人口大国,据相关调查,中国人口老龄化问题日益严重,老年人的身心健康将成为社会的重要问题[1]。
为给行动不便的老人提供方便,辅助护理设备应运而生[2]。
按动力源不同,辅助护理设备可分为手动和电动两种[3]。
轮椅的背部支起机构可实现人由卧躺到坐起的位姿变化,节省人力,提高使用者的体感舒适度。
常用的背部支起机构有曲柄滑块机构、齿轮组机构和导杆机构[4]。
以曲柄滑块机构为原理的背部支起机构,以人力或电机为动力源,丝杠转动带动滑块及与滑块相连的连杆机构运动,完成角度调节,但该机构铰链点较多,故障率大,可靠性低,且占用空间较大[5-6];以齿轮组机构为原理的背部支起机构,可实现较大角度的调节,但齿轮润滑要求高,且齿面易出现点蚀等损伤[7];以导杆机构为原理的背部支起机构,铰接点少,机构简单,可靠性相对较高[8]。
在上述背景下,课题组提出轮椅的背部支起机构采用导杆机构,而导杆机构的主要部件为电动推杆。
课题组搭建了不同行程的电动推杆背部支起机构模型,分析背部支起运动过程中背部床板总成的角速度、电动推杆作用力和铰链承载力,以及舒适性等因素,确定电动推杆固定位置及行程,实现最优的设计。
1 总体布局设计多功能智能轮椅结构如图1所示。
安装在轮椅腿部和背部的电动推杆作为动力源,实现腿部弯曲和背部支起,完成座椅的多形态动作(背部支起、腿部弯曲和行走)。
图1 多模态轮椅布局Figure 1 Multi-modal seat背部支起机构如图2所示,电动推杆2一端通过铰链固定在电动推杆固定梁1上,另一端通过铰链固定在背部铰链固定梁3上,电动推杆的伸缩运动带动背部床板总成绕铰链的转动,完成背部支起功能。
翻背式助老电动床设计与研究
樊辉;王建波;赵南生
【期刊名称】《现代机械》
【年(卷),期】2024()1
【摘要】针对当前国内老龄化问题加重,老年人生活自主性较差的问题,设计了一款新型翻背式助老电动床。
电动床主要包括升降机构、起背曲腿联动机构、翻背机构。
可实现升降、起背曲腿和左右翻背功能,方便不同身高的老年人上下床,帮助老年人
更自由地起身、翻背。
通过控制电路,实现电动床整体高效运作,并设计监护装置,实时关注老年人的起居状态。
分析结果表明,助老电动床升降机构最大加速度约为
0.38 mm/s^(2),起背曲腿联动机构最大角加速度约为0.027°/s^(2),翻背机构最大角加速度为0.034°/s^(2)左右,整个运行过程平缓、稳定,符合老年人使用需求。
【总页数】6页(P63-68)
【作者】樊辉;王建波;赵南生
【作者单位】南通职业大学机械工程学院;南通大学工程训练中心
【正文语种】中文
【中图分类】TH122
【相关文献】
1.床椅分离式多功能护理床的抬背机构设计及其仿真
2.皖北地区猪舍发酵床自走式翻耙机设计与试验
3.基于多STM32和CAN总线的分布式控制电动护理床设计
4.HLX-11FF135型大跨度轨道式异位床翻抛机的设计
5.一种联动式护理床抬背机构的设计与研究
因版权原因,仅展示原文概要,查看原文内容请购买。
关于床椅一体化护理床抬背机构运动分
析与滑移补偿探讨
摘要:伴随着科技的进步和发展,人们对智能多功能护理床的要求也越来越高,在追求其舒适性的基础上,更加看重其实用性。
基于此,人们设计并研发了
一种多功能的床椅一体化护理床。
为了对此机构进行简化,避免其受到抬背机构
和床椅机构的影响,对传统的电动推杆进行了改进。
本文借助人机工程仿真软件,对床椅一体化护理床抬背机构的运动情况及滑移补偿情况进行了分析,具体内容
如下。
关键词:护理床;抬背机构;滑移机构;人机工程学
近年来,智能设备被越来越多的运用到医疗行业和服务领域中来,其中智能
护理为人们带来便利的同时,也进一步改善着其生活质量。
智能化装备在护理过
程中的有效应用,可极大的减轻护理人员的工作量,缓解其心理压力,降低社会
及家庭的负担,且有助于病人的生活自理。
当前,护理床的功能愈加完善,为了
进一步提升其舒适度,本文对多功能护理床展开了创新研究,并详细分析了抬背
机构和滑移补偿机构的重要作用。
1.抬背机构运动分析
1.1转角式抬背机构分析
在对多功能护理床的抬背动作进行模拟时,可采用西门子人机工程仿真软件
进行,抬背时,人体髋关节的旋转中心,并不重合于护理床机构的旋转中心,从
而导致其压力重心出现了滑移。
在抬背过程中,其转矩跟随人体抬背角度的一起
改变。
如图1,对运动模型进行简化分析,T为驱动抬背的总转矩,将其分为T
1
和T
2,其分别为驱动背板和驱动人体上半身运动的转矩,r
1
和r
2
分别为背板重心
距离旋转轴旋转中心的长度及人体上半身重心距离髋骨旋转中心的长度,抬背速度为ω。
图1抬背结构简图
1.2背部滑移分析
在发生背板翻转动作时,背部改变平躺姿态为坐姿,人体背部与背板表面会
发生相对滑移,方向为自下至上,相反,当背板改变坐姿为平躺时,人体背部与
背板表面的相对位移方向则会是自上而下。
这种情况对于身体健康的人,则可在
自身腰腹力量的作用下进行调整,而对于年老体弱残者,由于缺乏较强的腰腹力量,很难自行改变,且滑移情况会打乱其睡衣或床单的整洁性,从而使局部压迫
感加重,在无护工帮助的情况下,将对病人的休息质量产生干扰。
因此,为进一步了解滑移的影响,本文分析了滑移量的变化情况。
为确保数
据真实可信,根据人体工程学,创建了抬背仿真运动模型,并参考我国成年人人
体主要尺寸,对抬背动作进行了描述和修正。
最终得出,仿真曲线与实测值基本
一致。
2.背板滑移补偿方案
2.1旋转中心重合法
之所以出现相对滑移,是因为人体与床背板具有不相重合的旋转中心,因此,为了消除相对滑移,需采取措施,使二者的旋转中心重合。
为确保背板与人体背
部相对静止,且不妨碍其抬背动作,需改进抬背机构,改变铰链连接方式,确保
在完成抬背运动的过程中,背板与人体背部以人体髋骨为旋转中心。
为此,需采
取以下两种措施,一是将旋转机构改变,执行抬背动作时,改变以往围绕背板与
座板的铰链处进行旋转的方式,将髋骨中心作为旋转轴。
二是使背板保持原来的
铰接旋转方式,采取浮动式方案,设计背板的上表面和背部接触部分,当抬背时,
浮动背板可跟随人体背部的运动情况,随之在一定范围内进行旋转,顺应人体位
姿的变化情况,为确保背板与人体背部处于相对静止,需借助弹性装置,将背板
上表面活动板与抬背机构进行连接。
当进行抬背活动时,浮动背板可在弹簧的弹
性变化范围内,随着人体背部的旋转情况,实时调整自身位姿,从而与人体保持
相对静止。
为完善该方案,需有效控制弹簧弹性模量,避免其过大或过小。
2.2主动补偿法
主动补偿法又称有动力补偿法,即将一层滑动背部添加到原来的背板上,借
助伺服电机
的力矩,对滑动背板进行控制,使其与人体背部的运动情况相一致,避免人
体出现相对位移。
具体操作为将行程为150mm的丝杠滑轨机构,加入到背板与滑
动背板之间,对抬背的角度数据进行收集,并将其作为滑动机构的输入信号,处
理后,转换丝杠滑轨的运动状态,使其转变为滑动背板的直线滑移运动。
在实施
该方案时,需针对抬背运动和背板滑移运动,采取两个独立的动力控制系统,其
难点为两组运动很难保持同步,需严格设计控制系统及信号采集情况,而且间断
抬背和反复启停现象会严重影响该过程,从而无法掌控其补偿精度。
2.3被动补偿法
被动补偿又称为无动力补偿法,类似于主动补偿法,其采用的滑移补偿方式
同样是借助一块固定板和滑动背板,不同点则是该方法不需伺服控制系统,可根
据抬背旋转情况,遵循背板滑移运动规律,设置出一套相应的凸轮传动机构。
为
确保滑移运动与抬背运动同时进行,可根据抬背旋转角度的变化,对滑移距离进
行控制。
该方案在实施时,可通过抬背的旋转运动与直线运动的相互转换来进行,且不受系统反复启停的影响。
3.结语
综上,改进和创新抬背机构,具有较大的现实意义和理想价值,可改善传统
机构在功能复合过程中的弊端,且可作为依据,供未来设计和改进护理床进行参考。
此外,结合对背板滑移的探讨及设计的补偿方案,可极大的提升用户的舒适
程度。
而且西门子JACK人机工程仿真软件的运用,进一步彰显了其设计的人性化。
此外,根据人机工程学创建机构运动模型,进而展开对抬背机构的运动分析,可作为参考依据,为该方案提供支持,进而推动对护理床的开发研究进程。
参考文献
[1]王学龙. 基于人体工程学的多功能护理床抬背机构的三维模型仿真设计[J]. 科技视界, 2018(11):15-16.
[2]秦帅华, 赵新华, 杨玉维,等. 多功能护理床起背机构创新设计及运动分
析[J]. 天津理工大学学报, 2018, 034(002):1-5,11.
[3]胡木华, 刘静华, 陈殿生,等. 床椅一体化多功能护理床——实现卧床老
人生活自理的梦想[J]. 机器人技术与应用, 2017(02):46-50.
作者简介:宋明玺(1999-02-19),男,汉族,籍贯:青海省海东市互助县,学历:本科在读。