recurdyn笔记
- 格式:doc
- 大小:22.50 KB
- 文档页数:1
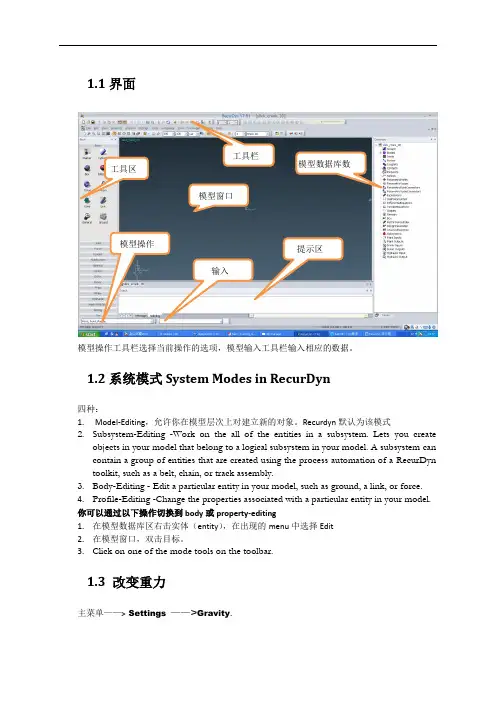
1.1界面模型操作工具栏选择当前操作的选项,模型输入工具栏输入相应的数据。
1.2系统模式System Modes in RecurDyn四种:1. Model-Editing ,允许你在模型层次上对建立新的对象。
Recurdyn 默认为该模式2. Subsystem-Editing -Work on the all of the entities in a subsystem. Lets you createobjects in your model that belong to a logical subsystem in your model. A subsystemcan contain a group of entities that are created using the process automation of aRecurDyn toolkit, such as a belt, chain, or track assembly.3. Body-Editing - Edit a particular entity in your model, such as ground, a link, orforce.4. Profile-Editing -Change the properties associated with a particular entity in yourmodel. 你可以通过以下操作切换到body 或property-editing1. 在模型数据库区右击实体(entity ),在出现的menu 中选择Edit2. 在模型窗口,双击目标。
3. Click on one of the mode tools on the toolbar.1.3 改变重力主菜单——>Settings ——>Gravity .工具区工具栏模型窗口 模型数据库数 模型操作输入 提示区可以在下拉菜单中选择常规的重力加速度值。
RecurDyn常见问题及解答目录安装和帮助 (2)概念理解 (3)Recurdyn导入和导出 (4)基本操作 (6)技术问题 (8)约束和接触 (8)柔性体 (8)履带 (9)链 (9)带 (10)分析计算 (10)其他 (11)安装和帮助:Q:RecurdynV7R2正式版和试用版的安装讲解?A:参考我们的安装文件。
Q:我可以获得哪方面的技术支持?A:使用版和正式版得到的技术支持不同。
根据购买技术服务与否,分别可以获得简单问题咨询、复杂问题咨询、模型调试、客户化定制等不同等级的技术支持。
Q:帮助文档有中文版的吗?A:目前只有英文的帮助文档,中文帮助文档正在进行中,将来会有。
Q:练习模型在哪个文件夹?A:C:\Program Files\FunctionBay, Inc\RecurDyn V7R2\Help\Manual\Tutorials\Basic TutorialQ:Tut1_Crank Slider 3D文件夹怎么没有任何模型?A:模型都是自己按照Tut1_Crank Slider建立的,文件夹里没有CAD模型。
概念理解:Q:SYSFNC的第2,3个参数是什么意思?A:第2个参数指坐标信息,第3个参数指坐标数量。
比如DX,DX有I,J坐标系也可以是I,J,K坐标系。
Q:rotational spring force中spring coefficient 和damping coefficient两个参数各自对扭矩的影响是什么?A:前者是弹簧刚度,乘上变形角度得到扭矩;后者是阻尼,乘上旋转速度得到扭矩。
Q:ExtendedSurfaceToSurface参数在实际运用中的对分析结果的影响A:法向力可表示为-k*(abs(delt))^m1-c*((abs(delt))^m3)*(dot(delt))^m2其中m1对应刚度指数;m2对应阻尼指数;m3对应渗透指数。
各量取值的多少,要看你定义的是线性或非线性。
recurdyn常用函数
recurdyn是一个用于模拟和分析递归动态系统的MATLAB 工具箱。
它提供了一组函数来帮助用户创建、分析和可视化递归动态系统的行为。
以下是一些常用的recurdyn函数:
1.rdyn: 这是创建递归动态系统的基本函数。
它允许用户定义系统的状态方程、初
始条件和参数。
2.step: 该函数用于模拟递归动态系统的瞬态响应。
它会在每个时间步长上更新系
统的状态,并返回模拟结果。
3.bode: 该函数用于计算并绘制递归动态系统的频率响应。
它返回系统的频率响应
数据,并生成相应的频谱图。
4.nyquist: 该函数用于计算并绘制递归动态系统的Nyquist图。
它基于系统的传
递函数或状态方程来计算系统的Nyquist曲线,并生成相应的图像。
5.margin: 该函数用于计算并绘制递归动态系统的稳定性边界。
它返回系统的稳定
性和鲁棒性边界,并生成相应的图像。
6.simulink: 该函数允许用户将recurdyn系统嵌入到MATLAB Simulink 模型
中,以便进行仿真和分析。
这些函数只是recurdyn工具箱中的一部分,还有许多其他功能和函数可用于模拟和分析不同类型的递归动态系统。
建议查阅MATLAB 的官方文档以获取更详细的信息和示例代码。

recurdyn基本算法
RecurDyn是一种基于多体动力学的仿真软件,广泛应用于机械工程、航空航天、汽车工程、船舶工程等领域。
本文主要介绍RecurDyn 的基本算法。
1. 多体动力学模型
RecurDyn的核心是多体动力学模型,包括质量、速度、位置、加速度等物理量。
模型的基本假设是物体之间存在相互作用力,根据牛顿定律,物体的加速度与作用力成正比,与物体的质量成反比。
2. 时空离散化
为了对物体的运动进行仿真,需要将时间和空间离散化,即将连续的时间和空间转化为离散的时间和空间。
在RecurDyn中,时间和空间离散化采用了显式欧拉法或隐式欧拉法。
3. 接触检测
接触是多体动力学模型中重要的问题,需要检测物体之间是否接触,并计算接触力。
RecurDyn采用了快速多极子方法或广义平面算法进行接触检测。
4. 接触力计算
在接触检测之后,需要计算接触力。
RecurDyn采用了Hertz接触理论或Coulomb接触模型进行接触力计算。
5. 约束条件
在多体动力学模型中,物体之间存在约束条件,如接触约束、几何约束、运动约束等。
RecurDyn采用了拉格朗日乘子法或笛卡尔-拉
格朗日方法进行约束条件的处理。
以上是RecurDyn的基本算法,通过对这些算法的深入了解和应用,可以更好地进行物体的运动仿真和分析。

recurdyn 栅格范围
RecurDyn栅格是一个三维网格数据结构,它可以用来描述三维模型中的几何形状,例如汽车车身、发动机和机械装置。
RecurDyn栅格可以用来表示三维对象的尺寸、形状和位置,还可以用来描述它们的运动和运动学特性。
RecurDyn栅格的范围可以是任意大小的三维空间区域,通常是正方形或长方形。
栅格中的每个节点表示一个三维坐标点,每个节点有一个固定的坐标值和位置,可以在二维平面或三维空间中表示。
RecurDyn栅格的范围通常由用户指定,可以根据需要进行调整和修改。

新一代的系统级多体动力学分析软件—虚拟产品设计开发工具RecurDyn (Recursive Dynamic)是由韩国FunctionBay公司基于其划时代算法——递归算法开发出的新一代多体系统动力学仿真软件。
它采用相对坐标系运动方程理论和完全递归算法,非常适合于求解大规模及复杂接触的多体系统动力学问题。
传统的动力学分析软件对于机构中普遍存在的接触碰撞问题解决得远远不够完善,这其中包括过多的简化、求解效率低下、求解稳定性差等问题,难以满足工程应用的需要。
基于此,韩国FunctionBay 公司充分利用最新的多体动力学理论,基于相对坐标系建模和递归求解,开发出RecurDyn软件。
该软件具有令人震撼的求解速度与稳定性,成功地解决了机构接触碰撞中上述问题,极大地拓展了多体动力学软件的应用范围。
RecurDyn不但可以解决传统的运动学与动力学问题,同时是解决工程中机构接触碰撞问题的专家。
RecurDyn 借助于其特有的MFBD(Multi Flexible Body Dynamics)多柔体动力学分析技术,可以更加真实地分析出机构运动中的部件的变形,应力,应变。
RecurDyn 中的MFBD技术用于分析柔性体的大变形非线性问题,以及柔性体之间的接触,柔性体和刚性体相互之间的接触问题。
传统的多体动力学分析软件只可以考虑柔性体的线型变形,对于大变形,非线性,以及柔性体之间的相互接触就无能为力了。
RecurDyn 中为用户提供了完整的解决方案,包含控制,电子,液压以及CFD,为用户的产品开发提供了完整的产品虚拟仿真、开发平台。
RecurDyn 的专业模块还包括,送纸机构模块,齿轮元件模块,链条分析模块,皮带分析模块,高速运动履带分析模块,低速运动履带分析模块,轮胎模块,发动机开发设计模块。
鉴于RecurDyn的强大功能,软件广泛应用航空、航天、军事车辆、军事装备、工程机械、电器设备、娱乐设备、汽车卡车、铁道、船舶机械及其它通用机械等行业。



【转】RecurDyn经验帮助RecurDyn, 经验1.force 就是力,也就是 F. 在RecurDyn 中力可以用公式或者方程来表示。
force 中有各种各样的力,例如spring ,bushing等Joint 就是约束,限制物体的自由度。
contact 是力的一种。
物体接触时候产生的力。
例如小球掉到地面上。
force 和 Joint 在一些极端的条件下可以等价的。
例如,绞结,你就可以用bushing 来代替,把绞结相应的钢都定义的非常大就可以了。
例如球绞结,他限制了物体连接处的x,y,z 三个方向不能运动。
如果用bushing 来代替,你可以把bushing 的X,Y,Z 的刚度都定义到很大(10E9),这样,物体在x,y,z 方向的位移非常小了-〉0 。
相当于把x,y,z都给限制住了。
这些方法可以解决一些过约束问题。
详细的你可以看一看各种力的刚度矩阵。
以及contact的力的方程。
2.怎么为FFLEX添加转动副?答:可以的,在柔性体上施加一个mpc or fdr, mpc 的master node 上施加铰接就可以了。
施加铰接的时候,选择点的时候就选择这个节点就可以。
不对NODE自由度进行拘束时,也可以用一般拘束方式(JOINTS/ Bushing)#但是要注意一点,记得把FFLEX BODY的connecting parameters内的user force connectore关闭,否则会有求解问题。
原文说明如下:Use Force Connector : It determines the connector type. If you check option, it means that you want to use a force connector. On the other hand, un-checking means that you want to use a fixed joint as a connector.3.关于柔性体,建议用R-Flex. 采用模态综合法建立柔性体。
1.force 就是力,也就是F. 在RecurDyn 中力可以用公式或者方程来表示。
force 中有各种各样的力,例如spring ,bushing等Joint就是约束,限制物体的自由度。
contact 是力的一种。
物体接触时候产生的力。
例如小球掉到地面上。
force 和Joint 在一些极端的条件下可以等价的。
例如,绞结,你就可以用bushing 来代替,把绞结相应的钢都定义的非常大就可以了。
例如球绞结,他限制了物体连接处的x,y,z 三个方向不能运动。
如果用bushing 来代替,你可以把bushing 的X,Y,Z 的刚度都定义到很大(10E9),这样,物体在x,y,z 方向的位移非常小了-〉0 。
相当于把x,y,z 都给限制住了。
这些方法可以解决一些过约束问题。
详细的你可以看一看各种力的刚度矩阵。
以及contact 的力的方程。
2.怎么为FFLEX添加转动副?答:可以的,在柔性体上施加一个mpc or fdr, mpc 的master node 上施加铰接就可以了。
施加铰接的时候,选择点的时候就选择这个节点就可以。
不对NODE自由度进行拘束时,也可以用一般拘束方式(JOINTS/ Bushing)但是要注意一点,记得把FFLEX BODY的connecting parameters内的user force connectore关闭,否则会有求解问题。
原文说明如下:Use Force Connector : It determines the connector type. If you check option, it means that you want to use a force connector. On the other hand, un-checking means that you want to use a fixed joint as a connector.3.关于柔性体,建议用R-Flex. 采用模态综合法建立柔性体。
recurdyn常用函数-回复RecurDyn是一款用于多体动力学和机械系统建模的软件工具,具有丰富的功能和强大的计算能力。
它提供了许多常用的函数和工具,可以帮助工程师和科学家在多个领域中进行高效的建模和仿真分析。
在本文中,我们将详细介绍RecurDyn中的一些常用函数,并一步一步回答与之相关的问题。
1. 模块化建模函数:RecurDyn提供了一系列模块化建模函数,可以方便地创建不同类型的机械系统。
通过使用这些函数,可以将系统分解成几个相互连接的模块,从而简化系统建模过程。
常用的模块化建模函数包括创建刚性连杆、旋转和平移副以及连接不同模块的关节等。
问题1:如何使用RecurDyn中的模块化建模函数创建一个旋转连杆系统?解答:首先,打开RecurDyn软件,在模型编辑器中创建一个新的模型。
然后,使用创建刚性连杆的函数创建两个刚性体,并将它们连接成一个旋转连杆系统。
在函数库中可以找到创建旋转连杆的函数,点击并按照提示进行操作。
最后,在模型编辑器中可以看到创建的旋转连杆系统,并可以进行进一步的建模和分析。
2. 捕捉函数:RecurDyn提供了一些捕捉函数,可以用于捕捉模型中的特定位置和方向。
通过使用这些函数,可以在处理动力学问题时对特定位置的位移和速度进行跟踪和记录。
问题2:如何使用RecurDyn中的捕捉函数跟踪旋转连杆系统中的特定位置?解答:首先,在建模过程中安装并配置捕捉器。
然后,使用捕捉函数可以将其应用于旋转连杆系统的特定位置。
可以选择在特定位置捕捉系统的位移和速度,并将其跟踪和记录以供后续分析使用。
3. 信号处理函数:RecurDyn提供了一些信号处理函数,用于处理从传感器或其他外部设备得到的传感器信号。
通过使用这些函数,可以对信号进行滤波、平滑处理或者提取特定的特征。
问题3:如何使用RecurDyn中的信号处理函数对从传感器获取的信号进行滤波处理?解答:首先,将传感器信号导入到RecurDyn系统中。
RecurDyn软件介绍:RecurDyn (Recursive Dynamic)是由韩国FunctionBay公司开发出的新一代多体系统动力学仿真软件。
它采用相对坐标系运动方程理论和完全递归算法,非常适合于求解大规模的多体系统动力学问题。
传统的动力学分析软件对于机构中普遍存在的接触碰撞问题解决得远远不够完善,这其中包括过多的简化、求解效率低下、求解稳定性差等问题,难以满足工程应用的需要。
基于此,韩国Function Bay 公司充分利用最新的多体动力学理论,基于相对坐标系建模和递归求解,开发出RecurDyn软件。
该软件具有令人震撼的求解速度与稳定性,成功地解决了机构接触碰撞中上述问题,极大地拓展了多体动力学软件的应用范围。
RecurDyn不但可以解决传统的运动学与动力学问题,同时是解决工程中机构接触碰撞问题的专家。
鉴于RecurDyn的强大求解功能,软件广泛应用航空、航天、军事车辆、军事装备、工程机械、电器设备、娱乐设备、汽车卡车、铁道、船舶机械及其它通用机械等行业。
RecurDyn给使用者的感觉快速:相对坐标系的运动方程、完全递归算法及强健的求解器使RecurDyn 具有飞驰般的的求解速度亲切:完全的基于WINDOWS开发的软件,操作界面友好,易学易用。
可靠:求解稳定,结果令人信服。
RecurDyn的使用效果最短时间内修正设计方案极大的缩短产品设计周期RecurDyn主要特色强大的接触模拟(包括三维的面-面接触)领先的柔性体动力学分析自动建模的专业化工具包成本/性能上的新标准与软件的接口:CAD- Parasolid 几何(Unigraphics,SolidWorks,SolideEdge),Pro/ENGINEER FEA-MSC/NASTRAN,ANSYS,I-DEAS 其它-MATLAB/Simulink(controls),ADAMS(机械系统仿真) RecurDyn的结构RecurDyn/Solid : CAD & 建模, 动画, 后处理RecurDyn/Solver : 刚体& 柔性体RecurDyn/工具包: 柔性体, 线性分析, 汽车, 列车, HM- 履带车, LM-履带车, 链条, 滑轮, 控制器, 电子机械, 水利学, 2DMTT, 3DMTT, 绳索, 等行业应用: 由于RecurDyn强大的求解能力,使得大规模、高复杂度、多碰撞等系统的建模求解成为可能,因而在军事车辆和武器设计上得到广泛应用和认同,尤其在履带式车辆动力学、车辆运动稳定性、过障能力、炮弹发射动力学、人机工程、生存能力等方面,已为韩国、日本军方解决了大量动力学设计问题。
一、安装服务:1、进入安装界面,单击Next2、选择incense 文件3、完成安装h剑al l St.eld \!lizard Co•plete、e d E回而呻肉e e u,o,n u:e,稳e s..,””Mα,n pυt... Ser呻""t n,1二、安装程序:1、进入安装界面选择程序语言2、填入公司名称3、提示系统中没有Microsoft Visual Studio 6.0 这个程序不能安装子程序向导,没关系不影响程序本身,安装后会自动安装一个Microsoft Visual Studio20054、完成程序安装三、启动服务:安装完服务之后必需定位一下lmgld.exe 和license 文件的位置,否则程序无法启动,定位过程如下:1、启动服务程序2、转到Config Services面板3、指定lmgld.exe、License文件及log 文件5、定位完成,保存,启动服务下图:6、如果服务启动后仍出项错误,如图:则需进行如下操作:图1进入RecurDyn授权管理图2选择“ Setup License Information”图3:添加主机名(完整计算机名称)图4:启动程序四、License的浮动在浮动机上安装RecurDyn程序(不用安装服务程序),安装后操作如下:图1进入RecurDyn授权管理图2选择“ Setup License Information”图3:添加主机名(完整计算机名称)图4:启动程序E :tot 崎 D怔-,、 ‘ 迦R,c ”‘"'kl坠晦 2i: Iii 擎 e,x il!I ill'!·“ ."< 8 · rm .> ,oE 』 回-A 伽 咀 I J ,:画 :e: 0 e e J o ”耳 ·’ 民E 二JC 二]IE!二3’飞 巳 λ .- •有画"出凶e• x坠 4在’街""'胆略画画ev >,,C ylfodu,...1!11,pu,d@f'r i$西品 4'X 宿唱医R ECUR D YN协商& ..耐Eo<•;]p 豆s也... 阳市副」才V J4 哇Q 国L 阴,咱lh阳回... 斗阳的画|帽 白 划;] Fl!S t 画剧” |々」址民自町’ ...c .o .n .,ta ..c .t....,,,,.阳 陆 刷 出 剖l E王二」号Loe ./囚 [哩CA <Jbbal吭a,...。
如图选取箭头指向的链轮图标,进入链轮工具包子系统。
点击途中箭头指向的标志,进入链轮工具包。
点击通知按钮,再在绘图区点击建立链轮。
出现如下对话框点击如图所示的下拉菜单,因为我们选在的是ISO606的链条,所以这里我们可以选择ISO606 library。
在途中圈选的地方输入链节、滚子直径及齿数参数,点击Update from ISO 606 Lib按钮就可自动生成其他参数。
参数自动生成后,链轮基本建立完成,但是要注意上图中圈选出来的参数。
要根据所选链板之间的距离设定。
不然在后期会出现干涉,导致无法仿真。
右击各项目会出现下拉菜单,出现属性选项,可以调整其坐标来设定中心距等参数。
点击途中按钮,在绘图区单击建立单链节,出现如下对话框:点击下拉菜单,根据需求选择相应的链节。
单击途中链轮装配按钮,然后依次选取两个链轮,就可以自动完成链轮的装配。
图中箭头指向是比较重要的参数。
链节数量的调整有利于后期啮合的调整。
点击ok,出现如下结果:点击图中按钮,出现如下对话框:选择旋转中心轴,设定旋转角度。
对已经建立的链轮进行旋转,使得其与链节在初始位置时相互啮合。
这一步非常重要,同时也很需要耐心。
点击此按钮,然后添加相关约束及载荷。
如图,点击转动付,然后点击链轮中心轴添加转动副。
点击force模块中的转矩按钮在点击中心轴添加转矩。
在database中右击属性添加相应的驱动及其他载荷的方程。
一切完成之后就可以点击下图中的按钮进行仿真。
分析完成之后,可以右击下图中圈选的部分,弹出图中对话框如上对话框中可以选择仿真结果的输出项。
单击上图中的按钮可以绘制仿真结果的界面。
如下图所示:右侧可以选择你需要输出的结果,还可以显示表格,如图中下方所示,方便读取相关数据。
到此recurdyn动力学仿真分析完成。
从以上的分析过程我们就可以得到在链轮转动过程中,其每个链齿所受力的分布情况,接下来我们借助ANSYS WORKBENCH对其静强度进行分析。
1.创建轮胎力
注意点:(1)生成轮胎力时,重力方向必须要在Z轴方向
(2)必须在XZ平面建立轮胎模型
(3)轮胎力的Z轴是轮胎的旋转轴
(4)轮胎模型和轮胎力的方向必须一致
(5)轮胎中心点方向必须与轮胎力的运动marker点方向一致
步骤:(1)将重力方向设为Z轴,将工作平面改为XZ平面
(2)创建轮胎几何模型
(3)将工作平面改为XY平面(为了创建轮胎力)
(4)单击FORCE下的轮胎力图标
(5)单击2点,轮胎力Z轴方向由这2点决定
(6)打开轮胎力属性对话框,将connector选项卡中的欧拉角复制到剪贴板
(7)打开轮胎几何模型属性对话框
(8)将材料输入方式由library改为user input
(9)单击CM,在弹出的对话框中选择origin&orientation选项卡,在欧拉角一栏中粘贴,将轮胎几何模型的质心marker点方向修改为轮胎力的action marker 的欧拉角方向一致。
可以通过设置轮胎属性参数来建立不同轮胎模型。
2.路面
轮胎需要和路面接合起来进行仿真,提供了4中创建路面的方式:
Outline road :轮廓线路面
Spline road :样条曲线路面
Face road :面路面
Import road :导入路面文件
步骤:(1)单击body下的ground按钮,进入ground编辑界面
(2)通过curve and surface 创建2条样条曲线或2条轮廓线
(3)单击spline road 或是outline road
(4)选择样条曲线,右击在快捷菜单中选择fininsh operation 确认生成路面。
面路面,事先创建一个面,其他步骤和线路线相同。