东北大学自动控制原理考研真题(二)2008-2015
- 格式:pdf
- 大小:8.58 MB
- 文档页数:67
东北大学考试试卷(A闭卷)2014—2015学年第一学期课程名称:自动控制原理②一、简答题(每题3分,共12分)(1)简要描述一个设计合理的闭环系统的中频段形状。
(2)系统的稳态误差与哪些因素有关?如何减小系统的稳态误差?(3)已知一个最小相位系统有二个闭环极点,其实部分别为:-σ1=-2;-σ2=-30,哪一个极点对系统动态响应过程的影响大,为什么?(4)系统校正方法有哪些?二、分析题(每题8分,共8分)试画出人从书架上取书的负反馈控制系统方框图,并简述其工作过程。
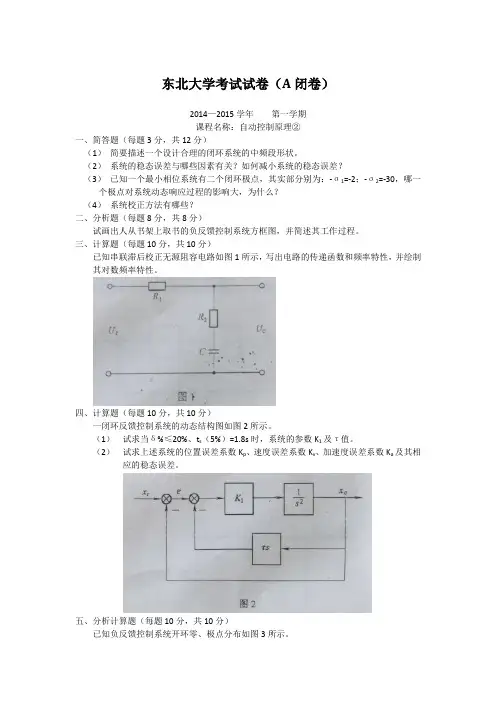
三、计算题(每题10分,共10分)已知串联滞后校正无源阻容电路如图1所示,写出电路的传递函数和频率特性,并绘制其对数频率特性。
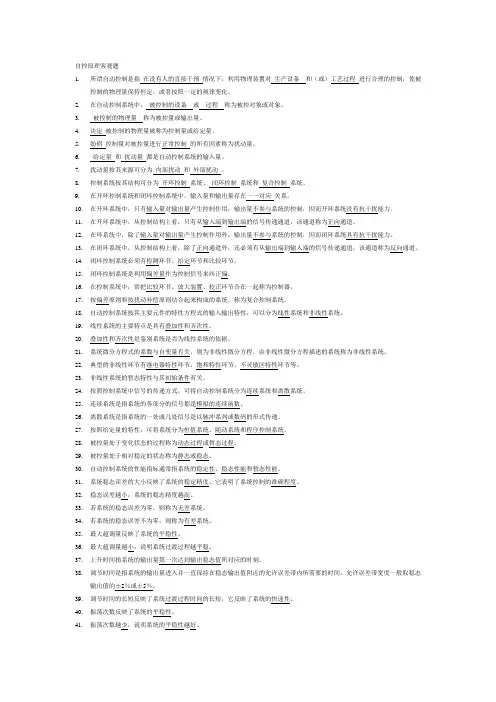
四、计算题(每题10分,共10分)一闭环反馈控制系统的动态结构图如图2所示。
(1)试求当δ%≤20%、t s(5%)=1.8s时,系统的参数K1及τ值。
(2)试求上述系统的位置误差系数K p、速度误差系数K v、加速度误差系数K a及其相应的稳态误差。
五、分析计算题(每题10分,共10分)已知负反馈控制系统开环零、极点分布如图3所示。
(1)试写出开环传递函数;(2)绘制所对应负反馈系统的概略根轨迹(给出过程);(3)分析增加开环零点对轨迹形状及系统性能有什么影响?六、计算题(每题10分,共6分)已知最小相位系统开环对数幅频特性如图4所示。
(1)试写出其传递函数;(2)求相位裕度及增益裕度;(3)判断闭环系统的稳定性。
七、综合题(每题10分,共10分)设一最小相位系统K=50时的幅相频率特性如图5所示,试分析确定使系统闭环稳定的K的取值范围。
自控原理客观题1.所谓自动控制是指在没有人的直接干预情况下,利用物理装置对生产设备和(或)工艺过程进行合理的控制,使被控制的物理量保持恒定,或者按照一定的规律变化。
2.在自动控制系统中,被控制的设备或过程称为被控对象或对象。
3.被控制的物理量称为被控量或输出量。
4.决定被控制的物理量被称为控制量或给定量。
5.妨碍控制量对被控量进行正常控制的所有因素称为扰动量。
6.给定量和扰动量都是自动控制系统的输入量。
7.扰动量按其来源可分为内部扰动和外部扰动。
8.控制系统按其结构可分为开环控制系统、闭环控制系统和复合控制系统。
9.在开环控制系统和闭环控制系统中,输入量和输出量存在一一对应关系。
10.在开环系统中,只有输入量对输出量产生控制作用,输出量不参与系统的控制,因而开环系统没有抗干扰能力。
11.在开环系统中,从控制结构上看,只有从输入端到输出端的信号传递通道,该通道称为正向通道。
12.在环系统中,除了输入量对输出量产生控制作用外,输出量不参与系统的控制,因而闭环系统具有抗干扰能力。
13.在闭环系统中,从控制结构上看,除了正向通道外,还必须有从输出端到输入端的信号传递通道,该通道称为反向通道。
14.闭环控制系统必须有检测环节、给定环节和比较环节。
15.闭环控制系统是利用偏差量作为控制信号来纠正偏。
16.在控制系统中,常把比较环节、放大装置、校正环节合在一起称为控制器。
17.按偏差原则和按扰动补偿原则结合起来构成的系统,称为复合控制系统。
18.自动控制系统按其主要元件的特性方程式的输入输出特性,可以分为线性系统和非线性系统。
19.线性系统的主要特点是具有叠加性和齐次性。
20.叠加性和齐次性是鉴别系统是否为线性系统的依据。
21.系统微分方程式的系数与自变量有关,则为非线性微分方程,由非线性微分方程描述的系统称为非线性系统。
22.典型的非线性环节有继电器特性环节、饱和特性环节、不灵敏区特性环节等。
23.非线性系统的暂态特性与其初始条件有关。
2011年东北大学自动控制原理考研试题(回忆版)
(1)①自动控制系统的三种类型分类;
②线性定常系统传递函数的概念∶注意漏答在零状态条件下。
(2)控制系统结构图题(复合控制类型)∶首先是求解系统的传递函数,然后问当Wc 为多少时,系统的误差为0,这是书上复合控制的内容。
(3)自动控制系统的时域分析题,首先给出传递函数的K、零点、极点求传递函数(是个3阶系统),然后是系统性能指标的一些计算,主要内容有超调量、调节时间、峰值时间,由于系统是3阶的,需要根据零、极点的相应位置进行降阶,然后再利用二阶系统性能指标公式进行求解。
(4)自动控制系统的根轨迹分析法,主要考查了三阶系统180"根轨迹的绘制,并问系统为单调和振荡时放大系数的范围。
(5)给出校正前、后系统的伯德图,首先求出系统校正前、后的传递函数,然后计算校正装置(控制器)的传递函数并分析此种校正的特性作用,最后是求系统的穿越频率和相位裕度。
(6)给出一个含有输入、输出的放大器装置,分析是何种非线性特性,然后画出输出-输入关系曲线、输出曲线,并计算系统的描述函数,最后是画出系统的负倒描述函数曲线。
(7)给出离散系统框图求 D(z),首先要根据被控对象求取被控对象的离散传递函数W(z),然后根据题目里要求的C(z)、R(z)利用离散系统闭环脉冲传递函数关系求取D (z),然后是画出采样信号的图像,是输出c的。
自控原理考研真题及答案自控原理是自动控制领域的基础课程,对于考研学生而言,掌握自控原理的知识非常重要。
为了帮助考生更好地备考自控原理,以下将介绍一道经典的自控原理考研真题,并给出详细的答案解析。
题目及答案如下:1.某控制系统的传递函数为G(s) = (s+2)/(s^2+6s+10),将其分解为部分分式后,若其阶数为n,则n等于多少?答案解析:根据题目给出的传递函数G(s),可以得到其分母的根为s^2+6s+10=0,通过求根公式可求得其根为s1=-3+j,s2=-3-j。
由于这两个根均为复根,所以传递函数为二阶系统。
因此,答案为n=2。
2.某开环系统的传递函数为G(s) = K/(s^3+4s^2+10s),若该系统为稳定系统,求参数K的范围。
答案解析:对于稳定系统来说,其特征多项式的所有根的实部都小于0。
根据题目给出的传递函数G(s),可以得到其特征多项式为s^3+4s^2+10s=0,通过求根公式可求得其根为s1=-1.33,s2=-0.67+j1.11,s3=-0.67-j1.11。
由于这三个根的实部均小于0,所以该系统为稳定系统。
由于K为传递函数的比例因子,不影响传递函数的特征根,所以参数K的范围可以取任意实数。
3.某系统的开环传递函数为G(s) = 10/(s+4),若该系统采用比例控制器,根据比例控制器的输出与输入的关系,求闭环传递函数。
答案解析:比例控制器的输出与输入的关系为C(s) = KpR(s),其中C(s)为比例控制器的输出,Kp为比例增益,R(s)为输入信号。
而闭环传递函数等于开环传递函数乘以比例控制器的传递函数,即T(s) = G(s)C(s)。
代入相应的数值,可得到T(s) = 10Kp/(s+4)。
4.某系统的开环传递函数为G(s) = 10/(s+5),若该系统采用积分控制器,根据积分控制器的输出与输入的关系,求闭环传递函数。
答案解析:积分控制器的输出与输入的关系为C(s) = KI/s,其中C(s)为积分控制器的输出,KI为积分增益,s为Laplace变换变量。
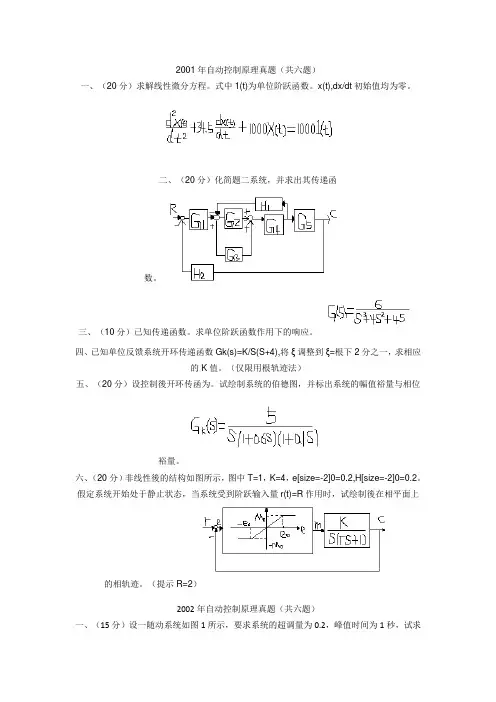
2001年自动控制原理真题(共六题)一、(20分)求解线性微分方程。
式中1(t)为单位阶跃函数。
x(t),dx/dt初始值均为零。
二、(20分)化简题二系统,并求出其传递函数。
三、(10分)已知传递函数。
求单位阶跃函数作用下的响应。
四、已知单位反馈系统开环传递函数Gk(s)=K/S(S+4),将ξ调整到ξ=根下2分之一,求相应的K值。
(仅限用根轨迹法)五、(20分)设控制後开环传函为。
试绘制系统的伯德图,并标出系统的幅值裕量与相位裕量。
六、(20分)非线性後的结构如图所示,图中T=1,K=4,e[size=-2]0=0.2,H[size=-2]0=0.2。
假定系统开始处于静止状态,当系统受到阶跃输入量r(t)=R作用时,试绘制後在相平面上的相轨迹。
(提示R=2)2002年自动控制原理真题(共六题)一、(15分)设一随动系统如图1所示,要求系统的超调量为0.2,峰值时间为1秒,试求1)增益K和反馈系数Kh之值。
2)根据所求的K值和Kh值,计算该系统的上升时间tr和调整时间ts.二、(20分)设一反馈系统如图2所示,试选择K1,K2以使该系统同时满足下列性能指标的要求:1)当单位斜坡输入时,系统的稳态误差小于等于0.35。
2)闭环极点的阻尼比小于等于0.707。
3)调整时间ts小于等于3秒。
.三、(20分)一控制系统如图3所示,当r(t)=t 时,要求系统的稳态误差小于0.2,且增益裕量不小于6dB,试求增益K的取值范围。
.四、(20分)采样系统如图4所示,试确定系统稳定的K值范围。
五、(15分)试确定由Y=X的3次方所表示的非线性的描述函数,式中X=ASinwt,X为输入量,Y为输出量。
六、(10分)以二阶系统Gk(s)=K/S(TS+1)说明伯德图形状对系统动态性能的影响。
2003年自动控制原理真题(共十题)一、(10分)增大控制器的比例控制系数对闭环系统输出有何影响?为什么加入滞后环节可以提高稳态精度而又基本上不影响系统暂态性能?二、(20分)写出下图所示环节输出Uc与Ur之间的微分方程。
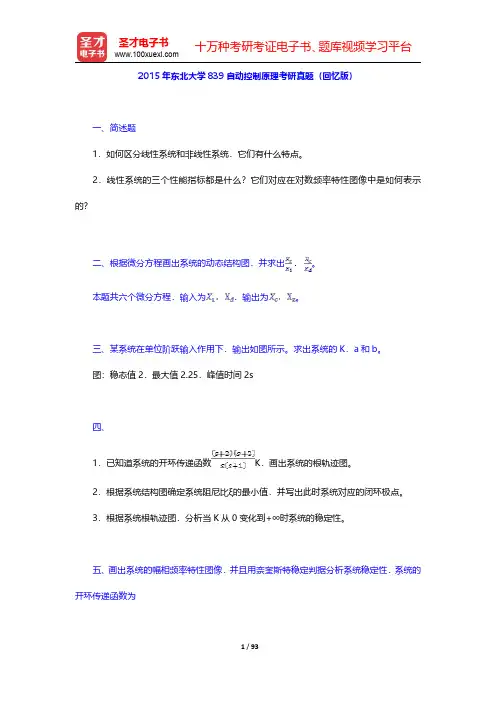
2015年东北大学839自动控制原理考研真题(回忆版)
一、简述题
1.如何区分线性系统和非线性系统.它们有什么特点。
2.线性系统的三个性能指标都是什么?它们对应在对数频率特性图像中是如何表示的?
二、根据微分方程画出系统的动态结构图.并求出。
本题共六个微分方程.输入为.输出为。
三、某系统在单位阶跃输入作用下.输出如图所示。
求出系统的K.a和b。
图:稳态值2.最大值2.25.峰值时间2s
四、
1.已知道系统的开环传递函数K.画出系统的根轨迹图。
2.根据系统结构图确定系统阻尼比ξ的最小值.并写出此时系统对应的闭环极点。
3.根据系统根轨迹图.分析当K从0变化到+∞时系统的稳定性。
五、画出系统的幅相频率特性图像.并且用奈奎斯特稳定判据分析系统稳定性.系统的开环传递函数为。
六、已知矫正系统如图所示.其中L是矫正前的系统开环频率特性.是矫正装置的倒特性.’是大回路的动态特性。
1.求出矫正以前的系统传递函数。
2.求出系统等效开环传递函数。
3.求出矫正以后系统的穿越频率和相角裕度。
(参考指定教材300页的图)
七、1.已知非线性系统结构图,问串联饱和非线性应满足什么条件系统才能稳定工作?
2.把系统等效为非线性与线性串联的形式.并画出等效传递函数。
八、已知离散系统结构图如下图所示.求出(1)中的.图(2)的C(z)。
(需用指定教材309页的一系列方法做.图为指定教材401页表中采样系统的综合。
)
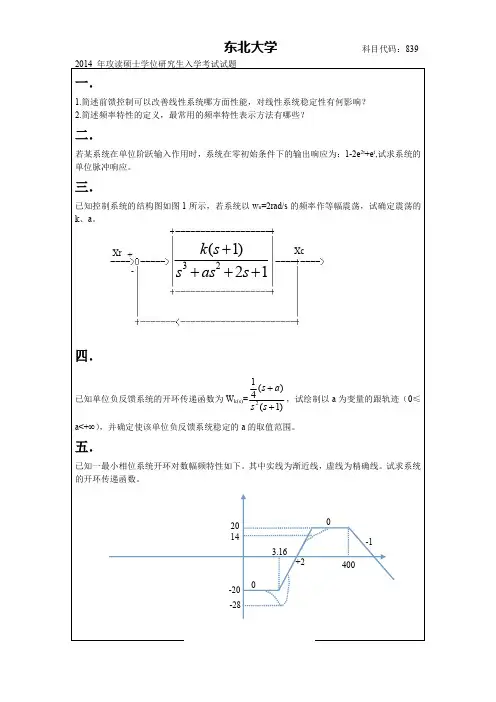
2014年东北大学839自动控制原理考研真题。
北科的双控是可以选电路或者是自动控制原理任意一科作为专业课考试的,请同学们注意一下,我今年考的是自控,下面我就说一下今年的真题吧。
今年最大的变化就是新增了四道共30分的简答题!之前是根本没有这样的题型的,所以请同学们复习的时候要多关注下各种题型。
第一道大题就是填空选择题了,共30分,其中有四道选择,其余的都是填空,每空两分,填空选择是相互穿插的,具体可参加14年真题。
第一小题是自动控制的数学模型有,其中还有好多,都是些基本知识,比较简单。
第二道大题就是我说的简答题了,共四道30分。
其中第一题让证明为什么离散系统稳定的条件是特征根在z域的单位圆内。
第二题是说出在死区PID控制的优缺点。
第三题是画出串级控制系统方框图(双闭环)。
第四题是让讨论一个参数系统的稳定性(用极坐标图或者伯德图)。
第三大题是带扰动的方框图,1问求CS/RS,2问求CS。
第四大题给出二阶单位阶跃的图形求各个参数和传递函数。
第五大题1是求系统稳定的条件劳斯判据2是求矫正传递函数使系统无稳态误差。
第六大题是根轨迹的各种问题。
第七大题是给出伯德图求传递函数,极坐标图,相角裕度,稳定性。
第八大题是求离散系统脉冲传递函数,判断系统稳定性。
新祥旭·科硕堂/。