一种永磁同步电机转子位置传感器零位偏差估计方法_杨云伟
- 格式:pdf
- 大小:1.31 MB
- 文档页数:4
![一种永磁同步电机转子位置传感器安装偏差估计方法[发明专利]](https://uimg.taocdn.com/52817bc55901020206409c2f.webp)
专利名称:一种永磁同步电机转子位置传感器安装偏差估计方法
专利类型:发明专利
发明人:杨云伟,黄永梅,陈兴龙,李锦英
申请号:CN201110369618.1
申请日:20111120
公开号:CN102401626A
公开日:
20120404
专利内容由知识产权出版社提供
摘要:一种永磁同步电机转子位置传感器安装偏差估计方法,步骤为:(1)利用外力旋转电机转子;(2)采样电机线线反电动势和转子位置传感器输出的位置值,得到n组数据(n表示多组);(3)将线线反电动势变换到两相静止坐标系;(4)用转子位置传感器输出的位置值,通过park变换将两相静止坐标系反电动势变换到旋转坐标系中,得到旋转坐标系直轴反电动势和交轴反电动势;(5)利用上一步得到的直轴和交轴反电动势比例,通过反正切运算得到n个角度值,求均值得到转子位置传感器安装偏差。
该方法可以精确地估计出隐极和凸极永磁同步电机转子位置传感器的安装偏差,得到很高的精度。
申请人:中国科学院光电技术研究所
地址:610209 四川省成都市双流350信箱
国籍:CN
代理机构:北京科迪生专利代理有限责任公司
代理人:成金玉
更多信息请下载全文后查看。
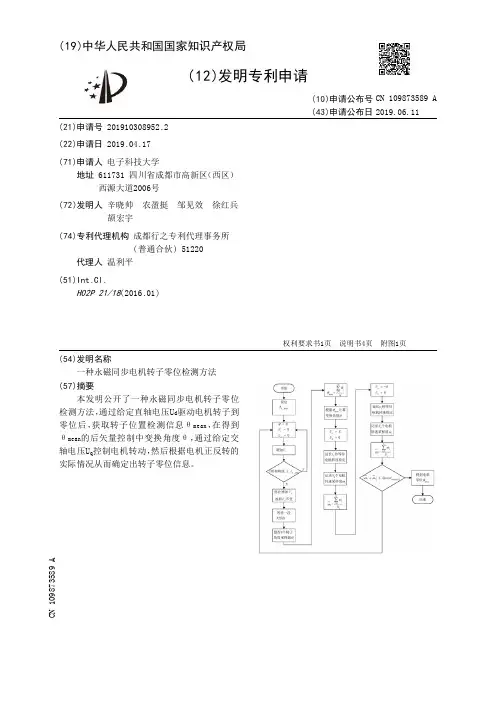
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910308952.2(22)申请日 2019.04.17(71)申请人 电子科技大学地址 611731 四川省成都市高新区(西区)西源大道2006号(72)发明人 辛晓帅 农盈挺 邹见效 徐红兵 颉宏宇 (74)专利代理机构 成都行之专利代理事务所(普通合伙) 51220代理人 温利平(51)Int.Cl.H02P 21/18(2016.01)(54)发明名称一种永磁同步电机转子零位检测方法(57)摘要本发明公开了一种永磁同步电机转子零位检测方法,通过给定直轴电压U d 驱动电机转子到零位后,获取转子位置检测信息θmean ,在得到θmean 的后矢量控制中变换角度θ,通过给定交轴电压U q 控制电机转动,然后根据电机正反转的实际情况从而确定出转子零位信息。
权利要求书1页 说明书4页 附图1页CN 109873589 A 2019.06.11C N 109873589A1.一种永磁同步电机转子零位检测方法,其特征在于,包括以下步骤:(1)、将矢量控制dq坐标系下q轴开环电压U q 以及变换角度θ设定为0,单独给定d轴开环电压U d ;逐渐增大开环电压U d ,输出实际作用于电机的电压U a 、U b 、U c ;(2)、设定的电流阈值I S_MAX ;采集三相定子电流采样值,判断U相定子电流采样值是否达到设定的电流阈值I S_MAX ,如果达到,则电机转子已经停止转动,且稳定在固定角度,进入步骤(3);否则,返回步骤(1);(3)、停止增大开环电压U d ,等待一段时间t后,记录下N个旋转变压器输出角度采样值θj ,j=1,2,…,N,然后计算N个θj 的算术平均值,记为θmean ;(4)、将开环电压U d 设定为0,将零位设置为步骤(2)得到的θmean ,然后根据旋转变压器反馈的机械角度和θmean 计算变换角度θ;其中,P PMSM 为PMSM极对数,P RotaryTran 为旋转变压器极对数,θm 为旋转变压器反馈的机械角度;(5)、单独给定开环电压U q ;正向增加开环电压U q ,输出实际作用于电机的电压U a 、U b 、U c ,当U q 逐渐增加到U q =K时,判断电机转速是否为正,如果为正,则延时一段时间t 1,等待电机转速稳定之后,记录下N 1个电机转速采样值ωi ,i=1,2,…,N 1,然后计算N 1个ωi 的算术平均值,记为并作为电机的稳定转速;否则,返回步骤(1);负向减小开环电压U q ,当开环电压U q 逐渐增加到U q =-K时,延时一段时间t 1,等待电机转速稳定之后,记录N 1个电机转速采样值ωk ,k=1,2,…,N 1,然后计算N 1个ωk 的算术平均值,记为并作为电机的稳定转速;否则,返回步骤(1);(6)、设定转速误差阈值Speed Threshold ;根据步骤(5)获取的稳定转速和计算电机的转速误差Δω,然后判断转速误差Δω是否小于转速误差阈值Speed Threshold ,如果Δω小于Speed Threshold ,则判定步骤(4)中的θmean 为电机转子零位;否则,返回步骤(1)。

专利名称:一种永磁同步电机无位置传感器控制的位置误差补偿方法
专利类型:发明专利
发明人:赵文祥,邱先群,吉敬华,和阳,陶涛,黄林森,晋世博
申请号:CN202111141527.2
申请日:20210928
公开号:CN113972874A
公开日:
20220125
专利内容由知识产权出版社提供
摘要:本发明公开了一种永磁同步电机无位置传感器控制的位置误差补偿方法。
该方法在αβ轴注入空间电压矢量信号,利用高频信号激发电机的饱和凸极性,再对高频响应电流信号进行处理获得基础位置角;同时根据空间电压矢量注入产生的高频磁链和高频电流,分析两者偏导数关系建立位置估计误差补偿模块,并利用含负载角的坐标变换锁定定子磁链位置获得位置补偿角。
最后利用基础位置角和位置补偿角合成估计位置角加入到无位置传感器控制中,实现永磁同步电机无位置传感器控制运行。
该方法能实时在线补偿位置估计误差,因此可有效解决永磁同步电机在重载条件下位置估计误差增大的问题,提高了位置估计精度。
申请人:江苏大学
地址:212013 江苏省镇江市京口区学府路301号
国籍:CN
更多信息请下载全文后查看。

![永磁同步电机无位置传感器的转子位置误差估计方法[发明专利]](https://uimg.taocdn.com/4a2f2f8d561252d381eb6eab.webp)
专利名称:永磁同步电机无位置传感器的转子位置误差估计方法
专利类型:发明专利
发明人:浦蓉杰,高翔,林利,蔡良生,赵艳,吴佳祥
申请号:CN201711349302.X
申请日:20171215
公开号:CN107872178A
公开日:
20180403
专利内容由知识产权出版社提供
摘要:本发明涉及一种永磁同步电机无位置传感器的转子位置误差估计方法,包括以下步骤:(1)构造基于永磁同步电机的γδ轴坐标系的滑模观测器,并获取转子位置误差;(2)针对不同转速,测得永磁同步电机不同转速下对应的转子位置误差,制作转子位置误差关于转速的一维表格;(3)根据电机转速查表得到转子位置误差,并通过估计转子位置与转子位置误差求和获取转子位置,该转子位置参与该永磁同步电机的控制系统的运算。
通过该永磁同步电机无位置传感器的转子位置误差估计方法,能够显著提高传统永磁同步电机无位置传感器算法的转子位置估计的准确性。
申请人:上海中科深江电动车辆有限公司
地址:201821 上海市嘉定区叶城路1631号
国籍:CN
代理机构:上海智信专利代理有限公司
更多信息请下载全文后查看。
![永磁同步电机转子位置传感器零角度计算方法和标定方法[发明专利]](https://uimg.taocdn.com/61d94f5ba88271fe910ef12d2af90242a995ab56.webp)
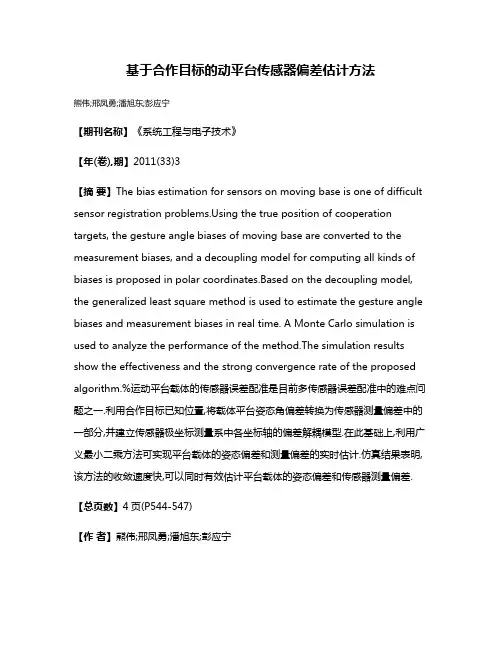
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201810832686.9(22)申请日 2018.07.26(71)申请人 联创汽车电子有限公司地址 201206 上海市浦东新区金吉路33弄4幢4楼(72)发明人 肖志锋 芦勇 罗来军 杜春洋 罗毅 王军 曹晨军 张善 (74)专利代理机构 上海浦一知识产权代理有限公司 31211代理人 焦天雷(51)Int.Cl.H02P 21/18(2016.01)H02P 21/14(2016.01)(54)发明名称永磁同步电机转子位置传感器零角度计算方法和标定方法(57)摘要本发明公开了一种永磁同步电机转子位置传感器零角度计算方法,包括定义永磁同步电机转子旋转一周有P个物理零角度、正转方向和反转方向;计算电机每个物理零角度位置转子正转和反转的电流矢量给定;通过电机加载正转和反转的电流矢量,获得每个物理零角度位置正转转子位置传感器零角度和反转转子位置传感器零角度;测定电机正反转负载,加权计算消除每个物理零角度位置的正转转子位置传感器零角度和反转转子位置传感器零角度误差,获得每个物理零角度转子位置传感器零角度。
本发明还公开了一种永磁同步电机转子位置传感器零角度标定方法。
本发明能避免负载带来的误差获得更准确的转子位置传感器零角度,以及更准确标定转子位置传感器零角度。
权利要求书2页 说明书9页 附图3页CN 109004875 A 2018.12.14C N 109004875A1.一种永磁同步电机转子位置传感器零角度计算方法,其特征在于,包括以下步骤:1)定义永磁同步电机转子旋转一周有P个物理零角度,每个物理零角度对应一个转子位置传感器零角度,P为自然数;定义永磁同步电机角度变化0°至360°为正转,电机角度变化360°至0°为反转,P是正整数;2)计算永磁同步电机每个物理零角度位置转子正转和反转的电流矢量给定;3)通过永磁同步电机加载步骤2)正转和反转的电流矢量,获得每个物理零角度位置正转转子位置传感器零角度和反转转子位置传感器零角度;4)测定永磁同步电机正反转负载,加权计算消除每个物理零角度位置的正转转子位置传感器零角度和反转转子位置传感器零角度误差,获得每个物理零角度转子位置传感器零角度。
基于合作目标的动平台传感器偏差估计方法熊伟;邢凤勇;潘旭东;彭应宁【期刊名称】《系统工程与电子技术》【年(卷),期】2011(33)3【摘要】The bias estimation for sensors on moving base is one of difficult sensor registration ing the true position of cooperation targets, the gesture angle biases of moving base are converted to the measurement biases, and a decoupling model for computing all kinds of biases is proposed in polar coordinates.Based on the decoupling model, the generalized least square method is used to estimate the gesture angle biases and measurement biases in real time. A Monte Carlo simulation is used to analyze the performance of the method.The simulation results show the effectiveness and the strong convergence rate of the proposed algorithm.%运动平台载体的传感器误差配准是目前多传感器误差配准中的难点问题之一.利用合作目标已知位置,将载体平台姿态角偏差转换为传感器测量偏差中的一部分,并建立传感器极坐标测量系中各坐标轴的偏差解耦模型.在此基础上,利用广义最小二乘方法可实现平台载体的姿态偏差和测量偏差的实时估计.仿真结果表明,该方法的收敛速度快,可以同时有效估计平台载体的姿态偏差和传感器测量偏差.【总页数】4页(P544-547)【作者】熊伟;邢凤勇;潘旭东;彭应宁【作者单位】海军航空工程学院信息融合技术研究所,山东,烟台,264001;中国航天科工集团运载技术研究院,北京,100854;清华大学电子工程系,北京,100084;海军航空工程学院信息融合技术研究所,山东,烟台,264001;中国航天科工集团运载技术研究院,北京,100854;清华大学电子工程系,北京,100084【正文语种】中文【中图分类】TN953【相关文献】1.基于Mean-Shift的传感器动态偏差估计方法 [J], 乔慧;潘江怀2.三维传感器组网偏差估计方法 [J], 潘江怀;李洪梅;何佳洲3.一种永磁同步电机转子位置传感器零位偏差估计方法 [J], 杨云伟;黄永梅;陈兴龙4.永磁同步电动机位置传感器零位偏差估计方法 [J], 胡任之;徐永向;王宝超;邹继斌5.基于目标相对位置的多传感器数据关联及传感器偏差估计 [J], 俞昭华;凌强;史盟钊因版权原因,仅展示原文概要,查看原文内容请购买。