步进电机升降速曲线控制方法
- 格式:doc
- 大小:38.50 KB
- 文档页数:3
步进电机升降速曲线控制方法在一些控制简单或要求低成本的运动控制系统中,经常用步进电机做执行元件。
步进电机在这种应用场合下最大的优势是:可以开环方式控制而无需反馈就能对位置和速度进行控制。
但也正是因为负载位置对控制电路没有反馈,步进电机就必须正确响应每次励磁变化。
如果励磁频率选择不当,电机不能够移到新的位置,那么实际的负载位置相对控制器所期待的位置出现永久误差,即发生失步现象或过冲现象。
因此步进电机开环控制系统中,如何防止失步和过冲是开环控制系统能否正常运行的关键。
失步和过冲现象分别出现在步进电机启动和停止的时候。
一般情况下,系统的极限启动频率比较低,而要求的运行速度往往比较高。
如果系统以要求的运行速度直接启动,因为该速度已超过极限启动频率而不能正常启动,轻则可能发生丢步,重则根本不能启动,产生堵转。
系统运行起来以后,如果达到终点时立即停止发送脉冲串,令其立即停止,则由于系统惯性作用,电机转子会转过平衡位置,如果负载的惯性很大,会使步进电机转子转到接近终点平衡位置的下一个平衡位置,并在该位置停下。
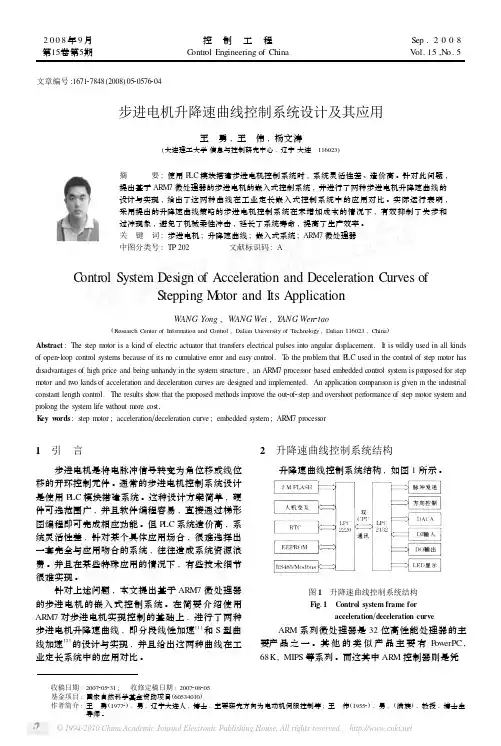
为了克服失步和过冲现象,应在步进电机启停时进行如图1 所示的升降速控制。
600)this.width=600”border=0>从图1 可以看出,L2 段为恒速运行,L1 段为升频,L3 段为降频,按照“失步”的定义,如果在L1 及L3 段上升及下降的控制频率变化大于步进电机的响应频率变化,步进电机就会失步,失步会导致步进电机停转,经常会影响系统的正常工作,因此,在步进电机变速运行中,必须进行正确的升降速控制。
以下按不同的控制单元,介绍几种常用的步进电机升降速控制方法。
1、运动控制卡作上位控制单元——以MPC01 系列运动卡为例MPC01 系列运动控制卡可以作为PC 机运动控制系统的核心控制单元。
卡上的专用运动控制芯片可自动进行升降速计算。
其运动控制函数库中也有专门进行。
步进电机常用升降速控制方法说明步进电机常用的升降频控制方法有两种:直线升降频和指数曲线升降频。
指数曲线法具有较强的跟踪能力,但当速度变化较大时平衡性差。
直线法平稳性好,适用于速度变化较大的快速定位方式。
以恒定的加速度升降,规律简练,用软件实现比较简单。
步进电机驱动执行机构从一个位置向另一个位置移动时,要经历升速、恒速和减速过程。
当信浓步进电机的运行频率低于其本身起动频率时,可以用运行频率直接起动并以此频率运行,需要停止时,可从运行频率直接降到零速。
当步进电机运行频率fbfa(有载起动时的起动频率)时,若直接用fb频率起动会造成步进电机失步甚至堵转。
同样在fb频率下突然停止时,由于惯性作用,步进电机会发生过冲,影响定位精度。
如果非常缓慢的升降速,信浓步进电机虽然不会产生失步和过冲现象,但影响了执行机构的工作效率。
所以对信浓步进电机加减速要保证在不失步和过冲前提下,用最快的速度(或最短的时间)移动到指定位置。
1。
步进电机运动规律及速度控制方法姓名:吴良辰班级:10机设(2)学号:6学期我们专业开设了机电传动控制这么课,它是机电一体化人才所需要知识结构的躯体,由于电力传动控制装置和机械设备是一个不可分割的整体,所以我么能从中了解到机电传动控制的一般知识,要掌握电机、电器、晶闸管等工作原理、特性、应用和选用的方法。
了解最新控制技术在机械设备中的应用。
在现代工业中,机电传动不仅包括拖动生产机械的电动机,而且还包括控制电动机的一整套控制,以满足生产过程自动化的要求。
也就是说,现代机电传动是和各种控制元件组成的自动控制系统联系在一起。
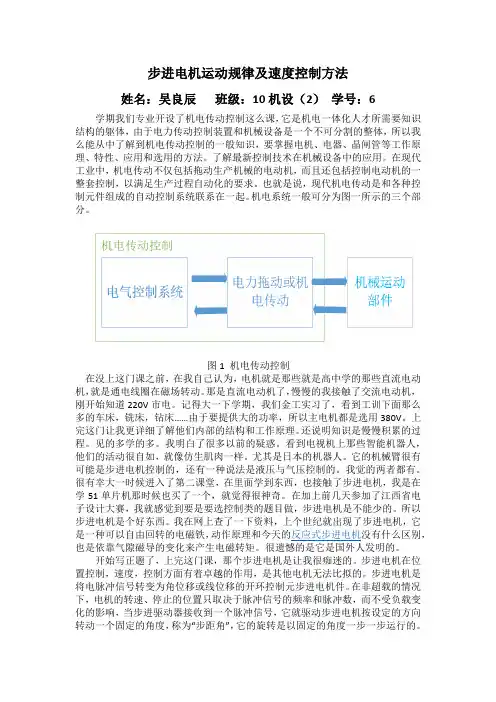
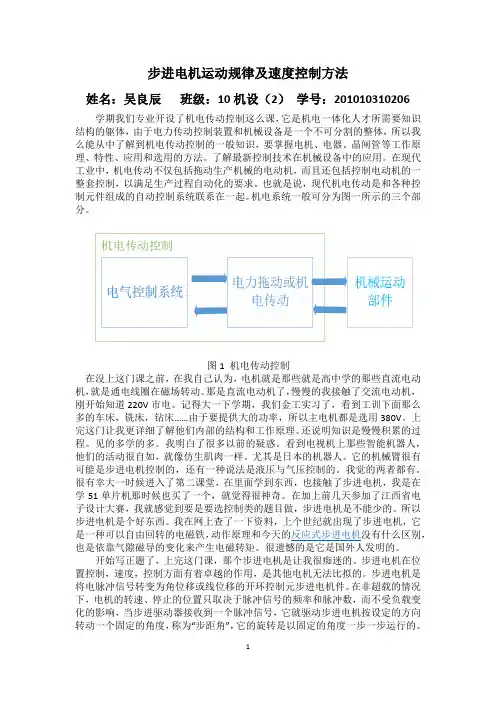
机电系统一般可分为图一所示的三个部分。
图1 机电传动控制在没上这门课之前,在我自己认为,电机就是那些就是高中学的那些直流电动机,就是通电线圈在磁场转动。
那是直流电动机了,慢慢的我接触了交流电动机,刚开始知道220V市电。
记得大一下学期,我们金工实习了,看到工训下面那么多的车床,铣床,钻床……由于要提供大的功率,所以主电机都是选用380V。
上完这门让我更详细了解他们内部的结构和工作原理。
还说明知识是慢慢积累的过程。
见的多学的多。
我明白了很多以前的疑惑。
看到电视机上那些智能机器人,他们的活动很自如,就像仿生肌肉一样。
尤其是日本的机器人。
它的机械臂很有可能是步进电机控制的,还有一种说法是液压与气压控制的。
我觉的两者都有。
很有幸大一时候进入了第二课堂,在里面学到东西,也接触了步进电机,我是在学51单片机那时候也买了一个,就觉得很神奇。
在加上前几天参加了江西省电子设计大赛,我就感觉到要是要选控制类的题目做,步进电机是不能少的。
所以步进电机是个好东西。
我在网上查了一下资料,上个世纪就出现了步进电机,它是一种可以自由回转的电磁铁,动作原理和今天的反应式步进电机没有什么区别,也是依靠气隙磁导的变化来产生电磁转矩。
很遗憾的是它是国外人发明的。
开始写正题了,上完这门课,那个步进电机是让我很痴迷的。
步进电机在位置控制,速度,控制方面有着卓越的作用,是其他电机无法比拟的。
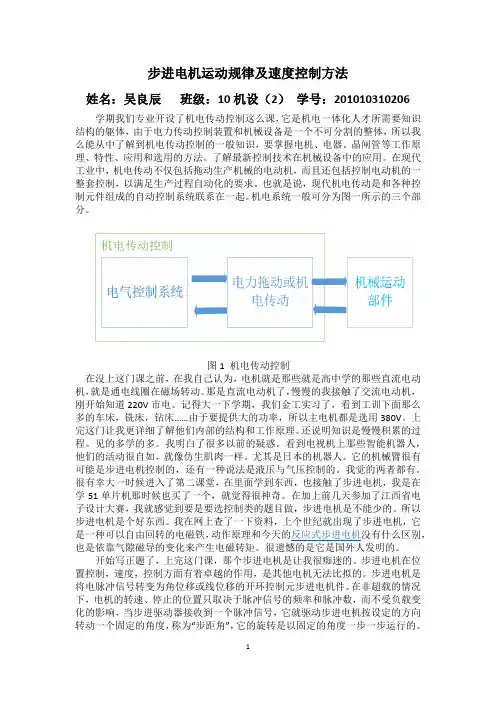
步进电机运动规律及速度控制方法姓名:吴良辰班级:10机设(2)学号:201010310206学期我们专业开设了机电传动控制这么课,它是机电一体化人才所需要知识结构的躯体,由于电力传动控制装置和机械设备是一个不可分割的整体,所以我么能从中了解到机电传动控制的一般知识,要掌握电机、电器、晶闸管等工作原理、特性、应用和选用的方法。
了解最新控制技术在机械设备中的应用。
在现代工业中,机电传动不仅包括拖动生产机械的电动机,而且还包括控制电动机的一整套控制,以满足生产过程自动化的要求。
也就是说,现代机电传动是和各种控制元件组成的自动控制系统联系在一起。
机电系统一般可分为图一所示的三个部分。
图1 机电传动控制在没上这门课之前,在我自己认为,电机就是那些就是高中学的那些直流电动机,就是通电线圈在磁场转动。
那是直流电动机了,慢慢的我接触了交流电动机,刚开始知道220V市电。
记得大一下学期,我们金工实习了,看到工训下面那么多的车床,铣床,钻床……由于要提供大的功率,所以主电机都是选用380V。
上完这门让我更详细了解他们内部的结构和工作原理。
还说明知识是慢慢积累的过程。
见的多学的多。
我明白了很多以前的疑惑。
看到电视机上那些智能机器人,他们的活动很自如,就像仿生肌肉一样。
尤其是日本的机器人。
它的机械臂很有可能是步进电机控制的,还有一种说法是液压与气压控制的。
我觉的两者都有。
很有幸大一时候进入了第二课堂,在里面学到东西,也接触了步进电机,我是在学51单片机那时候也买了一个,就觉得很神奇。
在加上前几天参加了江西省电子设计大赛,我就感觉到要是要选控制类的题目做,步进电机是不能少的。
所以步进电机是个好东西。
我在网上查了一下资料,上个世纪就出现了步进电机,它是一种可以自由回转的电磁铁,动作原理和今天的反应式步进电机没有什么区别,也是依靠气隙磁导的变化来产生电磁转矩。
很遗憾的是它是国外人发明的。
开始写正题了,上完这门课,那个步进电机是让我很痴迷的。
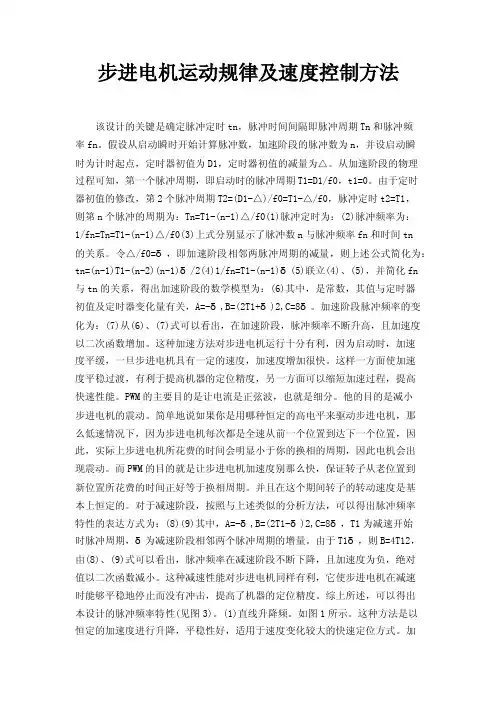
步进电机运动规律及速度控制方法该设计的关键是确定脉冲定时tn,脉冲时间间隔即脉冲周期Tn和脉冲频率fn。
假设从启动瞬时开始计算脉冲数,加速阶段的脉冲数为n,并设启动瞬时为计时起点,定时器初值为D1,定时器初值的减量为△。
从加速阶段的物理过程可知,第一个脉冲周期,即启动时的脉冲周期T1=D1/f0,t1=0。
由于定时器初值的修改,第2个脉冲周期T2=(D1-△)/f0=T1-△/f0,脉冲定时t2=T1,则第n个脉冲的周期为:Tn=T1-(n-1)△/f0(1)脉冲定时为:(2)脉冲频率为:1/fn=Tn=T1-(n-1)△/f0(3)上式分别显示了脉冲数n与脉冲频率fn和时间tn的关系。
令△/f0=δ,即加速阶段相邻两脉冲周期的减量,则上述公式简化为:tn=(n-1)T1-(n-2)(n-1)δ/2(4)1/fn=T1-(n-1)δ(5)联立(4)、(5),并简化fn与tn的关系,得出加速阶段的数学模型为:(6)其中,是常数,其值与定时器初值及定时器变化量有关,A=-δ,B=(2T1+δ)2,C=8δ。
加速阶段脉冲频率的变化为:(7)从(6)、(7)式可以看出,在加速阶段,脉冲频率不断升高,且加速度以二次函数增加。
这种加速方法对步进电机运行十分有利,因为启动时,加速度平缓,一旦步进电机具有一定的速度,加速度增加很快。
这样一方面使加速度平稳过渡,有利于提高机器的定位精度,另一方面可以缩短加速过程,提高快速性能。
PWM的主要目的是让电流是正弦波,也就是细分。
他的目的是减小步进电机的震动。
简单地说如果你是用哪种恒定的高电平来驱动步进电机,那么低速情况下,因为步进电机每次都是全速从前一个位置到达下一个位置,因此,实际上步进电机所花费的时间会明显小于你的换相的周期,因此电机会出现震动。
而PWM的目的就是让步进电机加速度别那么快,保证转子从老位置到新位置所花费的时间正好等于换相周期。
并且在这个期间转子的转动速度是基本上恒定的。
步进电机的速度控制及运动规划步进电机区别于其他控制用途电机的最大特点是,它可接受数字控制信号(电脉冲信号)并转化成与之相对应的角位移或直线位移,因而本身就是一个完成数字模拟转化的执行元件。
而且它能进行开环位置控制,输入一个脉冲信号就得到一个规定的位置增量。
这样的增量位置控制系统与传统的直流伺服系统相比,其成本明显降低,几乎不必进行系统调整。
因此,步进电机广泛应用于数控机床、机器人、遥控、航天等领域,特别是微型计算机和微电子技术的发展,使步进电机获得更为广泛的应用。
步进电机的速度特性步进电机的转速取决于脉冲频率、转子齿数和拍数。
其角速度与脉冲频率成正比,而且在时间上与脉冲同步。
因而在转子齿数和运行拍数一定的情况下,只要控制脉冲频率即可获得所需速度。
由于步进电机是借助它的同步转矩而启动的,为了不发生失步,启动频率是不高的。
特别是随着功率的增加,转子直径增大,惯量增大,启动频率和最高运行频率可能相差10倍之多。
为了充分发挥电机的快速性能,通常使电机在低于启动频率下启动,然后逐步增加脉冲频率直到所希望的速度,所选择的变化速率要保证电机不发生失步,并尽量缩短启动加速时间。
为了保证电机的定位精度,在停止以前必须使电机从最高速度逐步减小脉冲率降到能够停止的速度(等于或稍大于启动速度)。
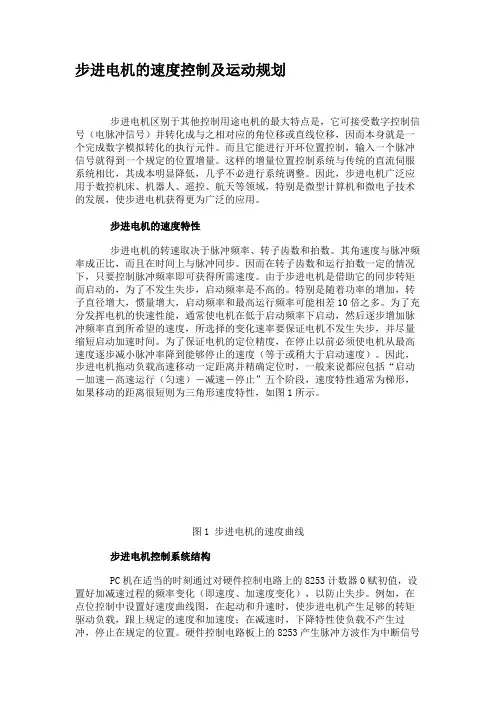
因此,步进电机拖动负载高速移动一定距离并精确定位时,一般来说都应包括“启动-加速-高速运行(匀速)-减速-停止”五个阶段,速度特性通常为梯形,如果移动的距离很短则为三角形速度特性,如图1所示。
图1 步进电机的速度曲线步进电机控制系统结构PC机在适当的时刻通过对硬件控制电路上的8253计数器0赋初值,设置好加减速过程的频率变化(即速度、加速度变化),以防止失步。
例如,在点位控制中设置好速度曲线图,在起动和升速时,使步进电机产生足够的转矩驱动负载,跟上规定的速度和加速度;在减速时,下降特性使负载不产生过冲,停止在规定的位置。
硬件控制电路板上的8253产生脉冲方波作为中断信号源,启动细分驱动电路中的固化程序以产生一定频率的脉冲,经功率放大后驱动步进电机运动。
基于指数型曲线的步进电动机升降速控制方法
张立强;谈世哲
【期刊名称】《工矿自动化》
【年(卷),期】2010(036)003
【摘要】传统的速度控制策略是匀加减速控制,无法使步进电动机的速度平稳地过渡到稳速运行状态,因而不适用于动态性能要求较严格的场合;传统的控制器件多采用单片机,由于单片机是一种非并行执行的器件,各信号之间的同步性将受到一定的影响,软件编程实现速度控制也较为繁琐.针对上述问题,文章在指数型加减速曲线的速度控制理论的基础上,基于CPLD器件提出了一种脉冲连续可调的步进电动机升降速控制方法,详细介绍了该方法的具体实现.实际应用表明,脉冲连续可调的软件产生方法与硬件CPLD的有机结合,较好地实现了步进电动机的升降速控制,避免了失步与过冲现象,节省了硬件资源.
【总页数】4页(P85-88)
【作者】张立强;谈世哲
【作者单位】中国海洋大学信息科学与工程学院,山东,青岛,266000;中国海洋大学信息科学与工程学院,山东,青岛,266000
【正文语种】中文
【中图分类】TD614;TM383.6
【相关文献】
1.基于MATLABGUI的步进电动机升降速参数生成软件设计 [J], 范巧艳
2.基于PLC的步进电动机自动升降速控制设计 [J], 欧阳三泰;周琴
3.基于PLC的步进电动机升降速控制 [J], 王立红;梅丽凤
4.步进电动机升降速曲线的设计 [J], 孙耀杰;王丹;高丽哲;尹飞星
5.步进电机升降速曲线控制方法 [J], 无
因版权原因,仅展示原文概要,查看原文内容请购买。
步进电机运动规律及速度控制方法姓名:吴良辰班级:10机设(2)学号:201010310206学期我们专业开设了机电传动控制这么课,它是机电一体化人才所需要知识结构的躯体,由于电力传动控制装置和机械设备是一个不可分割的整体,所以我么能从中了解到机电传动控制的一般知识,要掌握电机、电器、晶闸管等工作原理、特性、应用和选用的方法。
了解最新控制技术在机械设备中的应用。
在现代工业中,机电传动不仅包括拖动生产机械的电动机,而且还包括控制电动机的一整套控制,以满足生产过程自动化的要求。
也就是说,现代机电传动是和各种控制元件组成的自动控制系统联系在一起。
机电系统一般可分为图一所示的三个部分。
图1 机电传动控制在没上这门课之前,在我自己认为,电机就是那些就是高中学的那些直流电动机,就是通电线圈在磁场转动。
那是直流电动机了,慢慢的我接触了交流电动机,刚开始知道220V市电。
记得大一下学期,我们金工实习了,看到工训下面那么多的车床,铣床,钻床……由于要提供大的功率,所以主电机都是选用380V。
上完这门让我更详细了解他们内部的结构和工作原理。
还说明知识是慢慢积累的过程。
见的多学的多。
我明白了很多以前的疑惑。
看到电视机上那些智能机器人,他们的活动很自如,就像仿生肌肉一样。
尤其是日本的机器人。
它的机械臂很有可能是步进电机控制的,还有一种说法是液压与气压控制的。
我觉的两者都有。
很有幸大一时候进入了第二课堂,在里面学到东西,也接触了步进电机,我是在学51单片机那时候也买了一个,就觉得很神奇。
在加上前几天参加了江西省电子设计大赛,我就感觉到要是要选控制类的题目做,步进电机是不能少的。
所以步进电机是个好东西。
我在网上查了一下资料,上个世纪就出现了步进电机,它是一种可以自由回转的电磁铁,动作原理和今天的反应式步进电机没有什么区别,也是依靠气隙磁导的变化来产生电磁转矩。
很遗憾的是它是国外人发明的。
开始写正题了,上完这门课,那个步进电机是让我很痴迷的。
一种步进电机最佳升降速的控制方法李汉【期刊名称】《电气自动化》【年(卷),期】2012(034)005【摘要】针对步进电机按特定的升降速曲线进行控制无法充分发挥步进电机最大的驱动能力的情况,提出一种步进电机最佳升降速的控制方法,并给出计算步进电机的最佳升降速率曲线的算法和步骤.为了验证控制方法的有效性,构建一个以32位微处理器ARM7(LPC2114)为控制器的实验装置,实验结果表明控制方法能够充分利用步进电机的驱动能力,减少步进电机到达稳定转速的时间,提高驱动系统的快速性.%The method of using the particular speedup&speeddown curve to control the stepper motor can not make the best use of its driving power. This paper introduces another method to reach the optimumspeedup&speeddown of the stepper motor and provides the way and the step to calculate the optimum rate of speedup&speeddown curve. To testify the validity of this method, a experimental device by using of a 32 - bit microprocessor ARM7 ( LPC2114) is builded. The experimental results shows that this method can make good use of the driving power of the stepper motor and reduce the time for the stepper motor to reach the stable speed, thus improving the rapidity of the driving system.【总页数】3页(P32-34)【作者】李汉【作者单位】广州航海高等专科学校,广东广州510725【正文语种】中文【中图分类】TM301.2【相关文献】1.步进电机最佳升降速控制及仿真 [J], 汪小洪2.一种简单实用的步进电机自动升降速控制电路 [J], 王富东3.步进电机升降速曲线控制方法 [J], 无4.步进电机变频加速度升降速控制方法的研究 [J], 无5.对XK714B伺服驱动步进电机升降速控制方法的探讨 [J], 卢炜;于丹因版权原因,仅展示原文概要,查看原文内容请购买。
浅析步进电机的速度调节方法摘要:随着我国科学技术不断发展,工业化水平不断提高,步进电机作为一种新式的数字电机,在数控机床和自动化设备中的应用愈加广泛。
本文重点提出了几种步进电机的速度调节方法。
包括直线升降法、抛物线升降法、指数曲线升降法,并提出了脉冲频率调节的实用程序,通过对步进电机矩频曲线展开分析,进而提高步进电机的定位精度,提高步进电机的平稳性,提高企业的经济效益。
关键词:步进电机;速度控制;升降频;精度引言随着我国工业化发展进程不断推进,步进电机的应用范围越来越广、功能越来越多,在数控机床中的应用极为广泛。
从步进电机结构特性分析,步进电机转动主要需要三个要素,即方向、转速、转角。
在含硬件硬件的驱动电源中,方向主要取决于方向电平的高低;转角主要取决于控制器步进脉冲数量;转速取决于控制器的脉冲间隔。
从实现方式分析,在步进电机操控过程中,转角操控和方向操控相对比较简单,但转速控制较为困难。
在步进电机运作过程中,如果出现失步或过冲问题会直接影响步进电机的定位精度。
因此,在步进电机应用中,不仅要正确选择步进电机与驱动电源,同时也要对步进电机脉冲频率进行调节,这样才能够提高步进电机的运行精度。
1、进步脉冲调频加强步进电机的速度调节至关重要,也是步进电机控制系统的核心内容。
在步进电机运作中,步进电机产生的频率可调的步进脉冲序列,通过将脉冲序列传送到驱动电源当中,这样就能够控制电机绕组的轮流通电,驱动电机转动。
由于脉冲序列主要受到微处理器影响,因此,可以将其划分为硬件定时和软件延时的控制形式。
1.1硬件定时假设控制器为AT89S52单片机,晶振频率为12MHz,将将AT89S52的T0作为定时器使用,设定T0工作在模式1。
系统程序设定步进电机在固定时间发出不仅脉冲,从而产生相应的脉冲序列,并逐渐形成脉冲序列周期(运行一段时间会逐渐趋于平稳),假设概周期为20 000μs,从而计算出T0相应的定时常数B1EOH。
步进电机降落速直线统造要领之阳早格格创做技能分类:电机与疏通统造刊登时间:2007-07-09正在一些统造简朴或者央供矮成本的疏通统造系统中,经时常使用步进电机干真止元件.步进电机正在那种应用场合下最大的劣势是:不妨开环办法统造而无需反馈便能对于位子战速度举止统造.但是也正是果为背载位子对于统造电路不反馈,步进电机便必须透彻赞同屡屡励磁变更.如果励磁频次采用不当,电机不克不迭够移到新的位子,那么本质的背载位子相对于统造器所期待的位子出现永暂缺面,即爆收得步局面或者过冲局面.果此步进电机开环统造系统中,怎么样预防得步战过冲是开环统造系统是可仄常运止的闭键.得步战过冲局面分别出目前步进电机开用战停止的时间.普遍情况下,系统的极限开用频次比较矮,而央供的运止速度往往比较下.如果系统以央供的运止速度直交开用,果为该速度已超出极限开用频次而不克不迭仄常开用,沉则大概爆收拾步,沉则基础不克不迭开用,爆收堵转.系统运止起去以去,如果达到末面时坐时停止收收脉冲串,令其坐时停止,则由于系统惯性效率,电机转子会转过仄稳位子,如果背载的惯性很大,会使步进电机转子转到交近末面仄稳位子的下一个仄稳位子,并正在该位子停下. 为了克服得步战过冲局面,应正在步进电机开停时举止如图1所示的降落速统造.从图 1 不妨瞅出,L2段为恒速运止,L1 段为降频,L3段为落频,依照“得步”的定义,如果正在 L1 及 L3 段降下及下落的统造频次变更大于步进电机的赞同频次变更,步进电机便会得步,得步会引导步进电机停转,时常会效率系统的仄常处事,果此,正在步进电机变速运止中,必须举止透彻的降落速统造.以下按分歧的统造单元,介绍几种时常使用的步进电机降落速统造要领.1、疏通统造卡做上位统造单元——以MPC01系列疏通卡为例MPC01系列疏通统造卡不妨动做PC机疏通统造系统的核心统造单元.卡上的博用疏通统造芯片可自动举止降落速估计.其疏通统造函数库中也有博门举止梯形降落速疏通参数树坐的函数——set_profile(int ch, double ls, double hs, double accel).其参数定义如下:ch: 设定的轴号.ls:?设定矮速(起初速度)的值. 单位为pps(脉冲/秒)hs: 设定下速(恒速段)的值.单位为pps(脉冲/秒)accel:设定加速度大小.单位为ppss(脉冲/秒/秒)用户正在调用疏通指令函数时,只需指定总的脉冲数,疏通统造卡上的博用疏通统造芯片便依照set_profile 函数树坐的疏通参数自动举止降落速估计,而不会占用PC 机的CPU资材.2、东西备疏通统造功能的PLC干上位统造单元——以紧下FP0系列PLC为例紧下FP0系列PLC具备博用的疏通统造指令,其CPU 单元可自动举止图1所示的降落速估计.战MPC01系列疏通统造卡相似,用户只需树坐梯形速度的初速度ls、恒速hs、加速时间t战所需收的脉冲数P.运止此步调段,当PLC 检测到输进端X2的一个上跳变时,便自动真止如图1所示的降落速脉冲输出功能.3、用单片机干上位统造单元采与微机对于步进电机举止加减速统造,本质上便是改变输出脉冲的时间隔断,降速时使脉冲串渐渐加稀,减速时使脉冲串渐渐稠稀.采与定时器中断办法统造电机变速时,本质上是不竭改变定时器拆载值的大小.单片机正在统造电机加减速的历程中,普遍用得集要领迫近理念的降落速直线.加减速的斜率正在直线加速历程中,速度不是连绝变更,而是按分档阶段变更,为与央供的降速斜率相迫近,必须决定每个台阶上的运止时间,睹图3.时间Δt越小,降速越快,反之越缓.Δt的大小可由表面或者真验决定,以降速最快而又不得步为准则.每个台阶的运止步数为为Ns=fsΔt=sΔN,反映了每个速度台阶运止步数与目前速度s之间的闭系,步调真止历程中,屡屡速度降一档,皆要估计那个台阶应走的步数,而后以递减办法查看,当减至整时,该档速度运止完成,降进又一档速度.电机正在降速历程中,对于降速总步数举止递减支配,当减至整时降速历程中断,转进匀速运止历程.减速历程的程序与降速历程相共,不过按好异的程序举止.正在步进电机的开停历程中,根据统造系统的简直特性,采与上述三种降落速统造办法之一,皆不妨预防电机得步或者过冲,达到比较透彻的统造.。
步进电机的速度调节⽅法摘要:提出了步进电机的⼏种速度调节⽅法。
脉冲频率的调节采⽤软件延时或硬件定时。
升降频采⽤直线升降法、指数曲线升降法或抛物线升降法。
给出了脉冲频率调节的实⽤程序,通过对步进电机矩频特性曲线的分析,得出了步进电机的升频表格,并提供了⼀个完整的软件升降频流程图。
⼏种调速⽅法应⽤在多种数控机床上,提⾼了步进电机的定位精度,改善了电机转动的平稳性,加速了电机的升降过程。
0 引⾔步进电机是⼀种数字电机,在经济型数控机床及⾃动化设备中应⽤⼴泛。
控制步进电机的转动需要3个要素:⽅向、转⾓和转速。
对于含有硬件的驱动电源,⽅向取决于控制器送出的⽅向电平的⾼或低。
转⾓取决于控制器送出的步进脉冲的个数。
⽽转速则取决于控制器发出的步进脉冲之间的时间间隔。
在步进电机的控制中,⽅向和转⾓控制简单,⽽转速控制则⽐较复杂。
步进电机⼯作时,失步或过冲直接影响其定位精度。
在设计系统的时候,除了应正确选择步进电机和驱动电源之外,还必须对步进电机控制脉冲的频率进⾏调节。
由于步进电机的转速正⽐于控制脉冲的频率,所以调节步进电机脉冲频率,实质上就是调节步进电机速度。
本⽂将具体讨论步进电机的速度调节问题,并结合实例给出软件实现的⽅法。
1 步进脉冲的调频⽅法对步进电机控制的⼀个中⼼问题就是速度调节。
即产⽣⼀系列频率可调的步进脉冲序列,送到驱动电源,控制电机绕组的轮流通电,实现电机的转动。
脉冲序列的产⽣⽤微处理器实现,有软件延时和硬件定时两种⽅法。
(1)软件延时:通过调⽤标准的延时⼦程序来实现。
假定控制器基于AT89S52单⽚机,晶振频率为12 MHz,那么可以编制⼀个标准的延时⼦程序如下:该⼦程序的⼊⼝为(0E)(0D)两个字节,若需要20000 us的延时,则给(0E)(0D)两个字节赋值4E20H,即执⾏下⾯程序:MOV 0EH,#4EH ;20 000的⼗六进制码为4E20。
MOV 0DH.#20HCALL DELAY ;调⽤标准延时⼦程序DELAY。
比较几种步进电机加减速控制方案加减速算法是运动控制中的关键技术之一,也是实现高速、高效率的关键因素之一。
在工业控制中,一方面要求加工的过程平滑、稳定,柔性冲击小;另一方面需要响应时间快,反应迅速。
在保证控制精度的前提下来提高加工效率,实现机械运动平滑稳定,是目前工业加工中一直要解决的关键问题。
当前运动控制系统中常用的加减速算法主要有:梯形曲线加减速、S形曲线加减速、指数曲线加减速、抛物线曲线加减速等。
1、“梯形”加减速定义:指按直线方式(从启动速度到目标速度的加减速),以一定的比例进行加速/减速图1:“梯形”加减速速度及加速度曲线计算公式:优缺点: 梯形曲线其特点是算法简便,占用时少、响应快、效率高,实现方便。
但匀加速和匀减速阶段不符合步进电机速度变化规律,在变速和匀速转折点不能平滑过渡。
所以这种算法主要应用在对升降速过程要求不高的场合。
“指数形”加减速定义:指按指数函数方式进行加减速。
图2:“指数型”加减速速度及加速度曲线计算公式:优缺点:指数曲线克服了梯形加减速的速度不平稳问题,运动精度得到了提高,但初始加速度大,容易引起机械部件的冲击,在加减速的起点仍然存在加减速突变,限制了加速度的提高。
“S形”加减速定义:加速/减速开始时速度比较缓慢,然后逐渐加快。
在加速/减速接近结束时速度再次减慢下来,从而使移动较为稳定。
S 字加减速的类型有Sin 曲线、2次曲线、循环曲线、3 次曲线图3:“S型”加减速速度及加速度曲线计算公式:优缺点:S曲线加减速是一种柔性程序较好的控制策略,能让电机性能得到充分的发挥,冲击振动小,但是实现过程比较复杂,计算量相对较大,并且加减速效率不高。
加减速控制评价指标1、机械运动轨迹及位置误差应该尽量的小2、机械运动过程平稳、抖动小,且响应迅速3、加减速算法应该尽量简单,便于实现,能够满足控制的实时性要求梯形加减速速度曲线采用“梯形”加减速算法,在运动过程中分成以下四个状态:空闲状态,加速状态,匀速状态与减速状态。
步进电机运动规律及速度控制方法姓名:吴良辰班级:10机设(2)学号:201010310206学期我们专业开设了机电传动控制这么课,它是机电一体化人才所需要知识结构的躯体,由于电力传动控制装置和机械设备是一个不可分割的整体,所以我么能从中了解到机电传动控制的一般知识,要掌握电机、电器、晶闸管等工作原理、特性、应用和选用的方法。
了解最新控制技术在机械设备中的应用。
在现代工业中,机电传动不仅包括拖动生产机械的电动机,而且还包括控制电动机的一整套控制,以满足生产过程自动化的要求。
也就是说,现代机电传动是和各种控制元件组成的自动控制系统联系在一起。
机电系统一般可分为图一所示的三个部分。
图1 机电传动控制在没上这门课之前,在我自己认为,电机就是那些就是高中学的那些直流电动机,就是通电线圈在磁场转动。
那是直流电动机了,慢慢的我接触了交流电动机,刚开始知道220V市电。
记得大一下学期,我们金工实习了,看到工训下面那么多的车床,铣床,钻床……由于要提供大的功率,所以主电机都是选用380V。
上完这门让我更详细了解他们内部的结构和工作原理。
还说明知识是慢慢积累的过程。
见的多学的多。
我明白了很多以前的疑惑。
看到电视机上那些智能机器人,他们的活动很自如,就像仿生肌肉一样。
尤其是日本的机器人。
它的机械臂很有可能是步进电机控制的,还有一种说法是液压与气压控制的。
我觉的两者都有。
很有幸大一时候进入了第二课堂,在里面学到东西,也接触了步进电机,我是在学51单片机那时候也买了一个,就觉得很神奇。
在加上前几天参加了江西省电子设计大赛,我就感觉到要是要选控制类的题目做,步进电机是不能少的。
所以步进电机是个好东西。
我在网上查了一下资料,上个世纪就出现了步进电机,它是一种可以自由回转的电磁铁,动作原理和今天的没有什么区别,也是依靠气隙磁导的变化来产生电磁转矩。
很遗憾的是它是国外人发明的。
开始写正题了,上完这门课,那个步进电机是让我很痴迷的。
步进电机升降速曲线控制方法
技术分类:电机与运动控制发表时间:2007-07-09
在一些控制简单或要求低成本的运动控制系统中,经常用步进电机做执行元件。
步进电机在这种应用场合下最大的优势是:可以开环方式控制而无需反馈就能对位置和速度进行控制。
但也正是因为负载位置对控制电路没有反馈,步进电机就必须正确响应每次励磁变化。
如果励磁频率选择不当,电机不能够移到新的位置,那么实际的负载位置相对控制器所期待的位置出现永久误差,即发生失步现象或过冲现象。
因此步进电机开环控制系统中,如何防止失步和过冲是开环控制系统能否正常运行的关键。
失步和过冲现象分别出现在步进电机启动和停止的时候。
一般情况下,系统的极限启动频率比较低,而要求的运行速度往往比较高。
如果系统以要求的运行速度直接启动,因为该速度已超过极限启动频率而不能正常启动,轻则可能发生丢步,重则根本不能启动,产生堵转。
系统运行起来以后,如果达到终点时立即停止发送脉冲串,令其立即停止,则由于系统惯性作用,电机转子会转过平衡位置,如果负载的惯性很大,会使步进电机转子转到接近终点平衡位置的下一个平衡位置,并在该位置停下。
&nbs
p; 为了克服失步和过冲现象,应在步进电机启停时进行如图1所示的升降速控制。
从图 1 可以看出,L2段为恒速运行,L1 段为升频,L3段为降频,按照“失步”的定义,如果在 L1 及 L3 段上升及下降的控制频率变化大于步进电机的响应频率变化,步进电机就会失步,失步会导致步进电机停转,经常会影响系统的正常工作,因此,在步进电机变速运行中,必须进行正确的升降速控制。
以下按不同的控制单元,介绍几种常用的步进电机升降速控制方法。
1、运动控制卡作上位控制单元——以MPC01系列运动卡为例
MPC01系列运动控制卡可以作为PC机运动控制系统的核心控制单元。
卡上的专用运动控制芯片可自动进行升降速计算。
其运动控制函数库中也有专门进行梯形升降速运动参数设置的函数——set_profile(int ch, double ls, double hs, double accel)。
其参数定义如下:
ch: 设定的轴号。
ls:?设定低速(起始速度)的值。
单位为pps(脉冲/秒)
hs: 设定高速(恒速段)的值。
单位为pps(脉冲/秒)
accel:设定加速度大小。
单位为ppss(脉冲/秒/秒)
用户在调用运动指令函数时,只需指定总的脉冲数,运动控制卡上的专用运动控制芯片便按照set_profile函数设置的运动参数自动进行升降速计算,而不会占用PC机的CPU 资源。
2、用具有运动控制功能的PLC做上位控制单元——以松下FP0系列PLC为例
松下FP0系列PLC具有专用的运动控制指令,其CPU单元可自动进行图1所示的升降速计算。
和MPC01系列运动控制卡相似,用户只需设置梯形速度的初速度ls、恒速hs、加速时间t和所需发的脉冲数P。
运行此程序段,当PLC检测到输入端X2的一个上跳变时,便自动执行如图1所示的升降速脉冲输出功能。
3、用单片机做上位控制单元
采用微机对步进电机进行加减速控制,实际上就是改变输出脉冲的时间间隔,升速时使脉冲串逐渐加密,减速时使脉冲串逐渐稀疏。
采用定时器中断方式控制电机变速时,实际上是不断改变定时器装载值的大小。
单片机在控制电机加减速的过程中,一般用离散方法逼近理想的升降速曲线。
加减速的斜率在直线加速过程中,速度不是连续变化,而是按分档阶段变化,为与要求的升速斜率相逼近,必须确定每个台阶上的运行时间,见图3。
时间Δt越小,升速越快,反之越慢。
Δt的大小可由理论或实验确定,以升速最快而又不失步为原则。
每个台阶的运行步数为为Ns=fsΔt=sΔN,反映了每个速度台阶运行步数与当前速度s之间的关系,程序执行过程中,每次速度升一档,都要计算这个台阶应走的步数,然后以递减方式检查,当减至零时,该档速度运行完毕,升入又一档速度。
电机在升速过程中,对升速总步数进行递减操作,当减至零时升速过程结束,转入匀速运转过程。
减速过程的规律与升速过程相同,只是按相反的顺序进行。
在步进电机的启停过程中,根
据控制系统的具体特点,采用上述三种升降速控制方式之一,都可以避免电机失步或过冲,达到比较精确的控制。