机械设计作业答案朱理版
- 格式:ppt
- 大小:6.49 MB
- 文档页数:54
第四章1.构件和零件有何不同?构件是运动的基本单元,而零件是制造的基本单元。
一个构件中可以包含多个固联在一起的零件,一个单独的零件可以是一个最简单的构件。
2.试述四杆机构中曲柄、摇杆、连杆和机架的特性。
曲柄:连架杆中,能作整周回转的杆件称为曲柄;摇杆:连架杆中,只能作往复摆动的杆件称为摇杆;机架:机构中固定不动的构件。
3.简要总结四杆机构中曲柄存在的条件。
(1)最短杆与最长杆的长度之和小于或等于其他两杆长度之和。
(2)连架杆和机架中必有一个是最短杆。
4.在四杆机构中满足什么条件可以组成曲柄摇杆机构、双曲柄机构和双摇杆机构?以与最短杆相邻的杆件为机架,均为曲柄摇杆机构。
以最短杆为机架,为双曲柄机构。
以与最短杆相对的杆件为机架,为双摇杆机构。
5.什么是“死点”?在什么情况下发生?“死点”与“自锁”有何区别?机构中从动件与连杆共线的位置称为机构的死点位置.机构之所以出现死点,是因为原动件是作往复运动的构件,导致机构一定出现连杆与从动件共线.自锁是机械在给定方向的驱动力作用下,由于摩擦原因无论驱动力多大都不能使机械运动的现象。
当机构处于死点位置时,从动件将发生自锁,出现卡死现象;或受到突然外力的影响,从动件则会出现运动方向不确定现象。
6.什么是连杆机构的急回特性,什么是极位夹角,二者有何联系? 主动件做等带速运动,从动件空回行程平均速度大于工作行程平均速度的特性,称为连杆机构的急回特性。
主动件为曲柄而从动件有极限位置的平面连杆机构,其极位夹角θ为曲柄的回程运动角2ϕ的补角平面连杆机构有无急回特性取决于有无极位夹角,θ = 0,则机构没有急回特性。
而机构急回运动的程度取决于极位夹角θ的大小,θ越大,K 越大,机构的急回特性越显著。
7.某四杆机构如图4-101所示,各杆尺寸为AB = 150 mm 、BC = 240 mm 、CD = 400 mm 、DA = 500 mm ,问:(1)该机构属何种类型?(2)写出AB 、BC 、CD 、DA 四杆的名称。
第一章绪论(1)1-2 现代机械系统由哪些子系统组成, 各子系统具有什么功能?(2)答: 组成子系统及其功能如下:(3)驱动系统其功能是向机械提供运动和动力。
(4)传动系统其功能是将驱动系统的动力变换并传递给执行机构系统。
第二章执行系统其功能是利用机械能来改变左右对象的性质、状态、形状或位置, 或对作业对象进行检测、度量等, 按预定规律运动, 进行生产或达到其他预定要求。
第三章控制和信息处理系统其功能是控制驱动系统、传动系统、执行系统各部分协调有序地工作, 并准确可靠地完成整个机械系统功能。
第四章机械设计基础知识2-2 什么是机械零件的失效?它主要表现在哪些方面?答:(1)断裂失效主要表现在零件在受拉、压、弯、剪、扭等外载荷作用时, 由于某一危险截面的应力超过零件的强度极限发生的断裂, 如螺栓的断裂、齿轮轮齿根部的折断等。
(2)变形失效主要表现在作用在零件上的应力超过了材料的屈服极限, 零件产生塑性变形。
(3)表面损伤失效主要表现在零件表面的腐蚀、磨损和接触疲劳。
2-4 解释名词: 静载荷、变载荷、名义载荷、计算载荷、静应力、变应力、接触应力。
答: 静载荷大小、位置、方向都不变或变化缓慢的载荷。
变载荷大小、位置、方向随时间变化的载荷。
名义载荷在理想的平稳工作条件下作用在零件上的载荷。
计算载荷计算载荷就是载荷系数K和名义载荷的乘积。
静应力不随时间变化或随时间变化很小的应力。
变应力随时间变化的应力, 可以由变载荷产生, 也可由静载荷产生。
(1)2-6 机械设计中常用材料选择的基本原则是什么?(2)答:机械中材料的选择是一个比较复杂的决策问题, 其基本原则如下:①材料的使用性能应满足工作要求。
使用性能包含以下几个方面:②力学性能③物理性能④化学性能①材料的工艺性能应满足加工要求。
具体考虑以下几点:②铸造性③可锻性④焊接性⑤热处理性⑥切削加工性①力求零件生产的总成本最低。
主要考虑以下因素:②材料的相对价格③国家的资源状况④零件的总成本2-8 润滑油和润滑脂的主要质量指标有哪几项?答: 衡量润滑油的主要指标有: 粘度(动力粘度和运动粘度)、粘度指数、闪点和倾点等。
《机械设计》作业(第一次)填空1应力循环特性系数r=0的应力称为脉动循环。
2如果作用于零件上的应力超过材料的屈服极限,则零件将发生塑性变形。
3零件疲劳强度极限的综合影响系数包括零件的有效应力集中系数、尺寸系数、强化系数和表面质量系数。
4设计机器的方法大体上有内部式设计、外推式设计和开发性设计三种。
5在机械设计时,选择材料主要考虑使用要求、工艺要求和经济要求这三个方面的问题。
6防松的根本问题在于防止螺纹副相对转动,具体的防松装置或方法很多,就工作原理来看可分为利用摩擦、直接锁住和破坏螺纹副关系三种。
7不可拆的联接有焊接、铆接和胶接。
8普通平键联接的工作面是键的两侧面;楔键联接的工作面是键的上下面。
9零件的周向定位的目的是限制轴上零件与轴发生相对转动,最常用的周向定位零件是花键和键____。
10不随时间变化的应力称为静应力,随时间变化的应力称为变应力,具有周期性的变应力称为循环变应力。
11按照平面图形的形状,螺纹分为三角形螺纹、梯形螺纹和锯齿形螺纹等。
12驱动机器完成预定功能的部分称为___原动机__。
13金属材料尤其是钢铁使用最广;在机械产品中钢铁材料占__90%以上__。
14机械零件制造中使用最广的金属材料是_ 钢铁___。
15机器的基本组成部分为原动机部分、传动部分和执行部分。
16如果作用于零件上的应力超过材料的屈服极限,则零件将发生塑性变形。
17一部机器的质量基本上取决于__设计阶段___。
单选1零件设计时,限制零件中的应力不超过允许的限度的设计准则称为( A )。
A. 强度准则B. 刚度准则C. 寿命准则D. 振动稳定性准则2当两个被联接件不宜制成通孔,且需要经常拆卸通常采用( C )。
A.螺栓联接B.螺钉联接C.双头螺柱联接D.紧定螺钉联接3利用( A )热处理工艺可使金属材料的硬度降低、并消除内应力、均匀组织、细化晶粒和预备热处理。
A.退火 B. 正火 C. 表面淬火 D. 渗碳淬火4在机械设计中,常采用螺纹联接,键、花键、销联接和弹性环联接形式进行联接,这种联接称为( B )。

《机械原理》习题解答机械工程学院第一章绪论一、补充题1、复习思考题1)、机器应具有什么特征?机器通常由哪三部分组成?各部分的功能是什么?2)、机器与机构有什么异同点?3)、什么叫构件?什么叫零件?什么叫通用零件和专用零件?试各举二个实例。
4)、设计机器时应满足哪些基本要求?试选取一台机器,分析设计时应满足的基本要求。
2、填空题1)、机器或机构,都是由组合而成的。
2)、机器或机构的之间,具有确定的相对运动。
3)、机器可以用来人的劳动,完成有用的。
4)、组成机构、并且相互间能作的物体,叫做构件。
5)、从运动的角度看,机构的主要功用在于运动或运动的形式。
6)、构件是机器的单元。
零件是机器的单元。
7)、机器的工作部分须完成机器的动作,且处于整个传动的。
8)、机器的传动部分是把原动部分的运动和功率传递给工作部分的。
9)、构件之间具有的相对运动,并能完成的机械功或实现能量转换的的组合,叫机器。
3、判断题1)、构件都是可动的。
()2)、机器的传动部分都是机构。
()3)、互相之间能作相对运动的物件是构件。
()4)、只从运动方面讲,机构是具有确定相对运动构件的组合。
()5)、机构的作用,只是传递或转换运动的形式。
()6)、机器是构件之间具有确定的相对运动,并能完成有用的机械功或实现能量转换的构件的组合。
()7)、机构中的主动件和被动件,都是构件。
()2 填空题答案1)、构件2)、构件3)、代替机械功4)、相对运动5)、传递转换6)、运动制造7)、预定终端8)、中间环节9)、确定有用构件3判断题答案1)、√2)、√3)、√4)、√5)、×6)、√7)、√第二章机构的结构分析2-7 是试指出图2-26中直接接触的构件所构成的运动副的名称。
解:a)平面高副b)空间低副c)平面高副2-8将图2-27中机构的结构图绘制成机构运动简图,标出原动件和机架,并计算其自由度。
解:b)n=3,P=4 ,H P=0,F=3×3-2×4=1Lc) n=3,P=4 ,PH=0,F=3×3-2×4=1L2-9试判断图2-28中所示各“机构”能否成为机构,并说明理由。
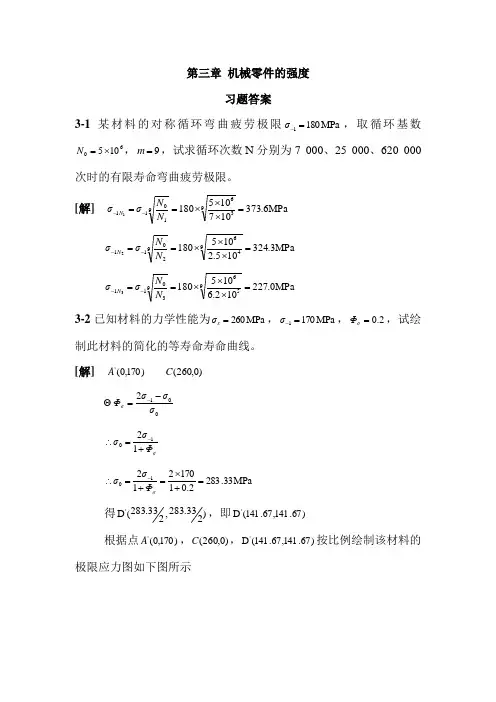
第三章 机械零件的强度习题答案3-1某材料的对称循环弯曲疲劳极限MPa 1801=-σ,取循环基数60105⨯=N ,9=m ,试求循环次数N 分别为7 000、25 000、620 000次时的有限寿命弯曲疲劳极限。
[解] MPa 6.373107105180936910111=⨯⨯⨯==--N N σσN MPa 3.324105.2105180946920112=⨯⨯⨯==--N N σσN MPa 0.227102.6105180956930113=⨯⨯⨯==--N N σσN 3-2已知材料的力学性能为MPa 260=s σ,MPa 1701=-σ,2.0=σΦ,试绘制此材料的简化的等寿命寿命曲线。
[解] )170,0('A )0,260(C 012σσσΦσ-=- σΦσσ+=∴-1210 MPa 33.2832.0117021210=+⨯=+=∴-σΦσσ 得)233.283,233.283(D ',即)67.141,67.141(D '根据点)170,0('A ,)0,260(C ,)67.141,67.141(D '按比例绘制该材料的极限应力图如下图所示第五章螺纹连接和螺旋传动习题答案5-5图5-49是由两块边板和一块承重板焊接的龙门起重机导轨托架。
两块边板各用4个螺栓与立柱相连接,托架所承受的最大载荷为20kN,载荷有较大的变动。
试问:此螺栓连接采用普通螺栓连接还是铰制孔用螺栓连接为宜?为什么?Q215,若用M6×40铰孔用螺栓连接,已知螺栓机械性能等级为8.8,校核螺栓连接强度。
[解] 采用铰制孔用螺栓连接为宜因为托架所受的载荷有较大变动,铰制孔用螺栓连接能精确固定被连接件的相对位置,并能承受横向载荷,增强连接的可靠性和紧密性,以防止受载后被连接件间出现缝隙或发生相对滑移,而普通螺栓连接靠结合面产生的摩擦力矩来抵抗转矩,连接不牢靠。
《机械设计基础》习题解答目录第0章绪论-------------------------------------------------------------------1第一章平面机构运动简图及其自由度----------------------------------2第二章平面连杆机构---------------------------------------------------------4 第三章凸轮机构-------------------------------------------------------------6第四章齿轮机构------------------------------------------------------------8第五章轮系及其设计------------------------------------------------------19 第六章间歇运动机构------------------------------------------------------26 第七章机械的调速与平衡------------------------------------------------29第八章带传动---------------------------------------------------------------34第九章链传动---------------------------------------------------------------38第十章联接------------------------------------------------------------------42第十一章轴------------------------------------------------------------------46第十二章滚动轴承--------------------------------------------------50第十三章滑动轴承------------------------------------------------ 56第十四章联轴器和离合器-------------------------- 59第十五章弹簧------------------------------------62第十六章机械传动系统的设计----------------------65第0章绪论12-3机器的特征是什么?机器和机构有何区别?[解] 1)都是许多人为实物的组合;2)实物之间具有确定的相对运动;3)能完成有用的机械功能或转换机械能。
《机械设计基本》习题解答目录第0章绪论-------------------------------------------------------------------1 第一章平面机构运动简图及其自由度----------------------------------2 第二章平面连杆机构---------------------------------------------------------4 第三章凸轮机构-------------------------------------------------------------6 第四章齿轮机构------------------------------------------------------- -----8 第五章轮系及其设计------------------------------------------------------19 第六章间歇运动机构------------------------------------------------------26 第七章机械调速与平衡------------------------------------------------29 第八章带传动---------------------------------------------------------------34 第九章链传动---------------------------------------------------------------38 第十章联接------------------------------------------------------------------42 第十一章轴------------------------------------------------------------------46 第十二章滚动轴承--------------------------------------------------50第十三章滑动轴承------------------------------------------------ 56第十四章联轴器和离合器-------------------------- 59第十五章弹簧------------------------------------62第十六章机械传动系统设计----------------------65第0章绪论12-3机器特性是什么?机器和机构有何区别?[解] 1)都是许多人为实物组合;2)实物之间具备拟定相对运动;3)能完毕有用机械功能或转换机械能。
机械原理第二版(朱理)作业答案机械原理作业第一章结构分析作业1.2解:F = 3n —2P L —P H = 3X 3-2X 4- 1=P H = 3X 4 —2X 5—1= 1 A点为复合铰1.2解:(b) F = 3n —2P L—P H = 3X 5—2X 6—2= 1B、E两点为局部自由度,F、C两点各有一处为虚约束。
(c) F = 3n —2P L—P H = 3X 5 —2X 7—0= 1 FIJKLM 为虚约束1.3解:F = 3n — 2P L — P H = 3X 7 — 2X 10— 0= 1 1) 以构件2为原动件,则结构由 成,故机构为H 级机构(图a )。
2) 以构件4为原动件,则结构由 成,故机构为H 级机构(图b )。
3) 以构件8为原动件,则结构由 个H 级杆组组成,8-7、6-5、4-3三个H 级杆组组 8-7、6-5、2-3三个H 级杆组组 2-3-4-5 一个皿级杆组和6- 7第二章运动分析作业2.1解:机构的瞬心如图所示- “ 气=5 mm/mm ,, t ,,八卄~一2.2解:取1作机构位置图如下图所示8%mm2.3解:取7 " mm/mm作机构位置图如下图a 所示1.求B 2点的速度V B 2V B 2 = 3 1 x L AB =10 x 30= 300 mm/s 2.求B 3点的速度V B 3V B3 =V B2 + VB3B2大小 ? 3 1 x LAB ?方向丄BC 丄AB // BC10 mm/s 取v mm 作速度多边形如下图b 所示,由图量得:阪=22 mm 所以 V B 3 二 沃% = 27X0 = 270 mm/sl BC = BC 和=1231 二 123由图a 量得:BC=123 mm ,贝SBC lV D _ AE 24而 2.求 V E P 14P1325,所以V D =V E ^24 =150 24=144 mm/sDE252531V E1501.25120 rad / s 3.求GD 2P 12P 14 38P 12P2498,所以十 38 =1.25 38=0.46 rad /s2198 984.求C 点的速度 V CV c = 2 P 24C 泊丄I= 0.46 44 5 =101.2 mm/s利用速度影像在速度多边形,过 p 点作丄CE ,过b 3点作丄BE ,得到epd 15 mm pe = 17 mm点;过e 点作丄pb 3,得到d 点,由图量得: , ,”、'V D = pd X »v = 15 汉 10 = 150 mm/ s所以 ,V E 二 pe "v =17 10 = 170 mm/sVB 3B 24•求©二b 2b 3 "v =17 10 = 170 mm/sV B3 270 厂 3 B32.2 rad/s 3I BC 123n5.求aB2a^2「f l AB =102 30 = 3000 mm/s2=50mm/ s 2/mm作速度多边形如上图 c 所示,由图量得:a B3 lBC1000123 2 =8.13 rad /s 26.求aB3a B3 =aB3n+ a B3f=a B2 + aB3B2 * + a B3B2大小 3 3 L BC ? 231 AB23 3V B3B2? 方向 B f C 丄BC B f A 丄BC // BCa n 一 a 一 3 l BC 二 2.22 123 = 595 2 mm/sa $3B2 = 2 3 V B3B 2 = 2 2.2 27° = 1188 mm/s2b'3 =23 mm n 3b'3 =20 mm, ,所以2a B3 二/b'3 笃=23 50 = 1150 mm/s 2a B 3 =n 3b'3"a =20 50 = 1000 mm/s 27.求〉38•求D 点和E 点的加速度a D 、a E利用加速度影像在加速度多边形,作 <:b'3esP BE ,即 b'3 _ 二e _ b'3 eCB _C^ ■'BE ,得到e 点;过e 点作丄化,得到d 点,由图量得:「:e = 16 mm 「d =13 mm十「 a D x 4a =13^50 = 650 mm/s 2所以,a E = 2 "a =16 50 = 800 mm/s 2。

《机械设计基础》习题解答目录第0章绪论-------------------------------------------------------------------1 第一章平面机构运动简图及其自由度----------------------------------2 第二章平面连杆机构---------------------------------------------------------4 第三章凸轮机构-------------------------------------------------------------6 第四章齿轮机构------------------------------------------------------- -----8 第五章轮系及其设计------------------------------------------------------19 第六章间歇运动机构------------------------------------------------------26 第七章机械的调速与平衡------------------------------------------------29 第八章带传动---------------------------------------------------------------34 第九章链传动---------------------------------------------------------------38 第十章联接------------------------------------------------------------------42 第十一章轴------------------------------------------------------------------46 第十二章滚动轴承--------------------------------------------------50第十三章滑动轴承------------------------------------------------ 56第十四章联轴器和离合器-------------------------- 59第十五章弹簧------------------------------------62第十六章机械传动系统的设计----------------------65第0章绪论12-3机器的特征是什么?机器和机构有何区别?[解] 1)都是许多人为实物的组合;2)实物之间具有确定的相对运动;3)能完成有用的机械功能或转换机械能。

第一章结构分析作业1.2 解:F = 3n-2P L-P H = 3×3-2×4-1= 0该机构不能运动,修改方案如下图:1.2 解:(a)F = 3n-2P L-P H = 3×4-2×5-1= 1 A点为复合铰链。
(b)F = 3n-2P L-P H = 3×5-2×6-2= 1B、E两点为局部自由度, F、C两点各有一处为虚约束。
(c)F = 3n-2P L-P H = 3×5-2×7-0= 1 FIJKLM为虚约束。
1.3 解:F = 3n-2P L-P H = 3×7-2×10-0= 11)以构件2为原动件,则结构由8-7、6-5、4-3三个Ⅱ级杆组组成,故机构为Ⅱ级机构(图a)。
2)以构件4为原动件,则结构由8-7、6-5、2-3三个Ⅱ级杆组组成,故机构为Ⅱ级机构(图b)。
3)以构件8为原动件,则结构由2-3-4-5一个Ⅲ级杆组和6-7一个Ⅱ级杆组组成,故机构为Ⅲ级机构(图c)。
(a) (b) (c)第二章 运动分析作业2.1 解:机构的瞬心如图所示。
2.2 解:取mmmm l /5=μ作机构位置图如下图所示。
1.求D 点的速度V D13P D V V =而 25241314==P P AE V V E D ,所以 s mm V V E D /14425241502524=⨯==2. 求ω1s r a d l V AE E /25.11201501===ω3. 求ω2因 98382412141212==P P P P ωω ,所以s rad /46.0983825.1983812=⨯==ωω 4. 求C 点的速度V Csmm C P V l C /2.10154446.0242=⨯⨯=⨯⨯=μω2.3 解:取mmmm l /1=μ作机构位置图如下图a 所示。
1. 求B 2点的速度V B2V B2 =ω1×L AB =10×30= 300 mm/s 2.求B 3点的速度V B3V B3 = V B2 + V B3B2大小 ? ω1×L AB ? 方向 ⊥BC ⊥AB ∥BC 取mm s mm v /10=μ作速度多边形如下图b 所示,由图量得:mmpb 223= ,所以smm pb V v B /270102733=⨯=⨯=μ由图a 量得:BC=123 mm , 则mmBC l l BC 1231123=⨯=⨯=μ3. 求D 点和E 点的速度V D 、V E利用速度影像在速度多边形,过p 点作⊥CE ,过b 3点作⊥BE ,得到e 点;过e 点作⊥pb 3,得到d 点 , 由图量得:mmpd 15=,mmpe 17=,所以smm pd V v D /1501015=⨯=⨯=μ , smm pe V v E /1701017=⨯=⨯=μ;smm b b V v B B /17010173223=⨯=⨯=μ4. 求ω3srad l V BC B /2.212327033===ω5. 求nB a 222212/30003010smm l a AB n B =⨯=⨯=ω6. 求3B aa B3 = a B3n + a B3t = a B2 + a B3B2k + a B3B2τ 大小 ω32L BC ? ω12L AB 2ω3V B3B2 ?方向 B →C ⊥BC B →A ⊥BC ∥BC 22233/5951232.2s mm l a BC n B =⨯=⨯=ω223323/11882702.222s mm V a B B k B B =⨯⨯=⨯=ω取mm s mm a 2/50=μ作速度多边形如上图c 所示,由图量得:mmb 23'3=π ,mmb n 20'33=,所以233/11505023's mm b a a B =⨯=⨯=μπ2333/10005020's mm b n a at B =⨯=⨯=μ7. 求3α233/13.81231000s rad l a BC tB ===α8. 求D 点和E 点的加速度a D 、a E利用加速度影像在加速度多边形,作e b 3'π∆∽CBE ∆, 即 BE eb CE e CB b 33''==ππ,得到e 点;过e 点作⊥3'b π,得到d 点 , 由图量得:mme 16=π,mmd 13=π,所以2/6505013s mm d a a D =⨯=⨯=μπ ,2/8005016s mm e a a E =⨯=⨯=μπ 。
机械设计基础版朱龙英主编后习题答案—-可编辑修改,可打印——别找了你想要的都有!精品教育资料——全册教案,,试卷,教学课件,教学设计等⼀站式服务——全⼒满⾜教学需求,真实规划教学环节最新全⾯教学资源,打造完美教学模式《机械设计基础》习题解答⽬录第0章绪论-------------------------------------------------------------------1 第⼀章平⾯机构运动简图及其⾃由度----------------------------------2 第⼆章平⾯连杆机构---------------------------------------------------------4 第三章凸轮机构-------------------------------------------------------------6 第四章齿轮机构------------------------------------------------------- -----8 第五章轮系及其设计------------------------------------------------------19 第六章间歇运动机构------------------------------------------------------26第七章机械的调速与平衡------------------------------------------------29 第⼋章带传动---------------------------------------------------------------34第九章链传动---------------------------------------------------------------38 第⼗章联接------------------------------------------------------------------42第⼗⼀章轴------------------------------------------------------------------46 第⼗⼆章滚动轴承--------------------------------------------------50第⼗三章滑动轴承------------------------------------------------ 56第⼗四章联轴器和离合器-------------------------- 59第⼗五章弹簧------------------------------------62第⼗六章机械传动系统的设计----------------------65第0章绪论12-3机器的特征是什么?机器和机构有何区别?[解] 1)都是许多⼈为实物的组合;2)实物之间具有确定的相对运动;3)能完成有⽤的机械功能或转换机械能。