第七章 CBTC系统
- 格式:ppt
- 大小:12.20 MB
- 文档页数:98
第七章CBTC系统第十二章 CBTC系统 CBTC系统第一节:概述第二节:西门子CBTC 第二节:西门子CBTC第一节第节概述一、移动闭塞的工作原理二、移动闭塞系统的优点基于通信的列车控制系统(CBTC)包含两种类基于通信的列车控制系统(CBTC)包含两种类型,一种是基于感应环线的CBTC 型,一种是基于感应环线的CBTC,一种是基于型种是基于感应环线的CBTC 种是基于感应环线的CBTC,一种是基于种是基于无线的C C。
无线的CBTC 无线的C C。
CBTC。
三、基于无线通信的CBTC系统工作原理、基于无线通信的CBTC 系统工作原理信基于无线通信的CBTC系统是指通过无线通信方基于无线通信的CBTC系统是指通过无线通信方式(而不是轨道电路),来确定列车位置和实现式(而不是轨道电路),来确定列车位置和实现车-地双向实时通信。
列车通过轨道上的应答器,确定列车绝对位置,轨旁CBTC ,确定列车绝对位置,轨旁CBTC 设备,根据各列车的当前位置、运行方向、速度等要素,向所列车的当前位置运行方向速度等要素向所管辖的列车发送“移动授权条件”,即向列车传送运行的距离、最高的运行速度,从而保证列车间的安全间隔距离。
四、无线CBTC系统设备四、无线CBTC系统设备无线CBTC系统主要的子系统无线CBTC系统主要的子系统有列车自动监控CBTC 系统主要的子系统,有列车自动监控系统主要的子系统,有列车自动监控(ATS)系统、数据通信系统(DCS)、区域控ATS)系统、数据通信系统(DCS)、区域控制器(ZC)、车载控制器(VOBC)及司机显示等。
子制器(ZC)、车载控制器(VOBC)及司机显示等。
子系统之间的通信基于开放的、标准的数据通信系统。
地面与移动的列车之间,都是基于无线通信统地面与移动的列车之间都是基于无线通信方式,进行信息交换。
五、CBTC系统的系统结构五、CBTC系统的系统结构 1.车载控制器(VOBC、 1.车载控制器(VOBC CC) 1 车载控制器(VOBC、CC)车载控制器,通过检测轨道上的应答器,从数据库中检索所收到的数据信息,以建立列车的绝对位置;车载控制器测量应答器之间的距离,并测量自探测到一个应答器后,列车所行驶的距离。


课程报告课程名称:城市轨道交通列车运行控制系统参考文献:what is communication-based train control文章总结:本文主要描述了什么是CBTC系统以及CBTC系统的由来。
CBTC是一种新型的列车控制系统。
是相对于传统的列车控制系统而言的,一、传统的列控系统1、轨旁信号控制系统:通过轨道电路和轨旁信号设备来实现。
2、轨道电路+机车信号:轨道电路在轨道中传输编码能量来向驾驶员显示连续信号显示信息(和速度信息)。
这种方式使得驾驶人员无需记住信号显示。
只需在确定的时间内(8s)确认信号显示。
若果没有确认,列车将会实施制动。
3、在机车信号的基础上移除轨旁信号设备。
这是因为轨道电路的编码信息被解码为允许速度,从而在联锁中无需具有间隔信号机。
4、数字化轨道电路:轨道电路能传输更多的信息,使得机车设备能够生成目标距离速度曲线。
二、CBTC系统传统的列控系统均属于机械联锁。
CBTC则是通过计算机连锁实现的。
而联锁系统必须提供某些重要的功能,其中包括入口锁定,进路锁定,探测器锁定以及方向(运行)锁定等。
在一个传统的FB系统中,轨道电路(或轴计数器)被用来确定列车的位置和方向。
如今的CBTC系统中提供一个备用列车检测系统来实现CBTC列车和非CBTC列车的混合运行。
在CBTC系统中,列车不是通过轨道电路来进行车-地的通信的,列车的位置,方向,速度等信息均是由列车车辆本身实现的。
车辆是通过转速计,加速计,陀螺仪,全球定位系统(GPS),应答器(或标签)等设备的组合来实现精确地列车定位。
在一个CBTC系统中(以车辆为中心),每个CBTC列车的位置都被传递到一个区域控制器的计算机中。
该CBTC系统保证了入口,进路,运行以及道岔锁闭的功能的实现。
CBTC系统可以实现联锁功能的方式有两种:第一种是通过具有独立设备,即一台设备用于联锁功能(联锁控制器),另一个用于CBTC列车安全距离(区域控制器)。


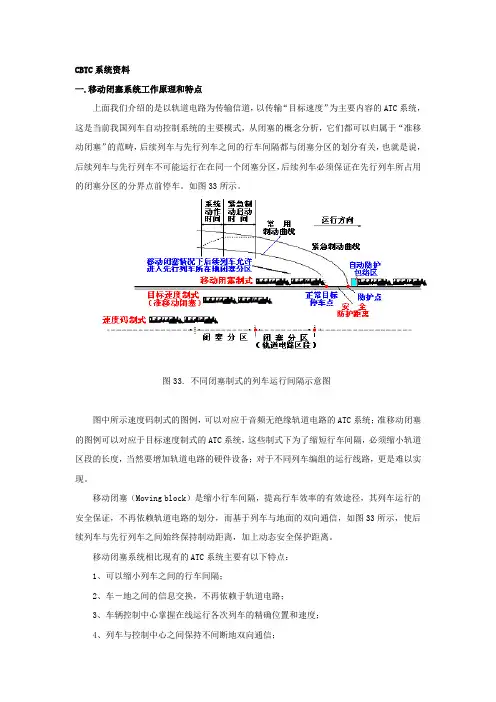
CBTC系统资料一.移动闭塞系统工作原理和特点上面我们介绍的是以轨道电路为传输信道,以传输“目标速度”为主要内容的ATC系统,这是当前我国列车自动控制系统的主要模式,从闭塞的概念分析,它们都可以归属于“准移动闭塞”的范畴,后续列车与先行列车之间的行车间隔都与闭塞分区的划分有关,也就是说,后续列车与先行列车不可能运行在在同一个闭塞分区,后续列车必须保证在先行列车所占用的闭塞分区的分界点前停车。
如图33所示。
图33. 不同闭塞制式的列车运行间隔示意图图中所示速度码制式的图例,可以对应于音频无绝缘轨道电路的ATC系统;准移动闭塞的图例可以对应于目标速度制式的ATC系统,这些制式下为了缩短行车间隔,必须缩小轨道区段的长度,当然要增加轨道电路的硬件设备;对于不同列车编组的运行线路,更是难以实现。
移动闭塞(Moving block)是缩小行车间隔,提高行车效率的有效途径,其列车运行的安全保证,不再依赖轨道电路的划分,而基于列车与地面的双向通信,如图33所示,使后续列车与先行列车之间始终保持制动距离,加上动态安全保护距离。
移动闭塞系统相比现有的ATC系统主要有以下特点:1、可以缩小列车之间的行车间隔;2、车-地之间的信息交换,不再依赖于轨道电路;3、车辆控制中心掌握在线运行各次列车的精确位置和速度;4、列车与控制中心之间保持不间断地双向通信;5、不同编组(不同长度)的列车,可以以最高的密度,运行于同一线路;6、ATC系统,从一个以硬件为基础的系统,向以软件为基础的系统演变。
基于通信的列车运行控制系统(Communication - Based Train Control—简称CBTC 系统), 便是支持移动闭塞的列车运行控制系统,它不仅适用于新建的各种城市轨道交通,也适用于旧线改造、不同编组运行以及不同线路的跨线运行。
近年来,随着通信技术的发展,尤其是无线通信、计算机网络技术和数字信号处理技术的迅速发展,信号系统的冗余、容错技术完善,在信号这个传统领域为CBTC的发展奠定了基础, CBTC系统已逐渐被信号界所认可,基于感应环线通信的移动闭塞CBTC系统,在我国也已运用于城市轨道交通;而基于无线(Radio)通信虚拟闭塞的CBTC系统,已经在国外多个城市轨道交通中被采纳,我国某些大城市的城市轨道交通也已经决定选用这种制式。
城市轨道交通信号CBTC系统控制探讨一、 CBTC系统的基本原理CBTC系统是一种通过无线通信技术实现列车与控制中心之间实时通信和数据交换的轨道交通信号控制系统。
相比传统的固定区间信号系统,CBTC系统具有更高的列车运行密度、更快的调度响应速度和更精确的列车位置控制能力。
其基本原理是通过在列车上安装车载设备和轨道设备,实现两者之间的实时通信和信息交换。
控制中心通过对列车位置、速度和运行状态的监控,动态调整列车运行方式,实现更加智能化的列车调度和运行控制。
二、 CBTC系统的关键技术与挑战CBTC系统是一个包含多种技术和设备的复杂系统,其设计与实现需要克服诸多技术挑战。
CBTC系统需要实现列车和控制中心之间的高效无线通信,确保数据传输的实时性和可靠性。
CBTC系统需要配备高精度的列车位置检测与控制装置,确保对列车位置和速度的准确监测和控制。
CBTC系统还需要具备自动列车控制、故障自愈和安全保护等技术功能,以应对各种突发情况和安全风险。
这些技术问题的解决对于CBTC系统的设计和应用具有重要意义,也是当前CBTC系统研究与发展的重点方向。
三、 CBTC系统的控制策略和应用效果CBTC系统的控制策略是保证其安全性和效率的关键。
其控制策略包括列车调度算法、故障自动恢复机制、安全保护策略等内容。
列车调度算法是CBTC系统的核心,其目的是通过动态调整列车运行速度和间距,最大限度地提高轨道交通系统的运行效率。
故障自动恢复机制则是CBTC系统的安全保障之一,通过对列车设备和通信设备的实时监测和故障诊断,及时发现和处置设备故障,确保轨道交通系统的安全运行。
目前,CBTC系统在许多国家和地区都得到了广泛应用,取得了显著的效果,为城市轨道交通的安全和运营效率提供了重要保障。
通过CBTC系统的应用,大大提高了列车运行的安全性和精确度,同时也提升了城市轨道交通系统的整体运行效率和服务水平。
随着智能化技术的发展和应用,CBTC系统在未来将有更广阔的空间和更深远的影响。


CBTC系统组成系统组成:cbtc系统的组成可以分为列车控制和信息传输两大部分,其中列车控制部分为atc系统,包括atp、ato、ats三个子系统,完成列车状态信息以及数据信息的处理并控制列车运行。
信息传输部分采用无线通信系统,进行连续双向的车-地通信,完成列车向地面控制设备传递列车的位置、速度以及其他状态。
下图是cbtc系统的具体结构示意图,该系统以列车为中心,其主要子系统包括:区域控制器,车载控制器,列车自动监控ats(中央控制)数据信息系统和司机显示等。
1.区域控制器(zc:zonecontroller),即为区域的本地计算机,与连锁区一一对应,通过数据通信系统保持与控制区域内的所有列车安全信息通信。
zc根据来自列车的位置报告跟踪列车并对区域内列车发布移动授权,实施联锁。
区域控制器采用三取二的检验沉余配置。
沉余结构的列车自动监控可实现所有列车运行控制子系统的通信,用于传输命令及监督子系统状况。
2.车载控制器:(vobc)与列车(指一个完整的编组)一一对应,实现列车自动防护atp和列车自动运转ato的功能。
车载控制器也使用三挑二的沉余布局。
车载接收者-查询器和天线与地面的应答器(信标)展开列车定位,测距发电机用作测距和对列车展开校正。
3.司机表明提供更多司机与车载控制器及列车自动监控ats的USB,表明的信息包含最小容许速度、当前测得速度、到站距离、列车运行模式及系统出错信息等。
4.数据通信系统同时实现所有列车运行掌控子系统间的通信,该系统使用对外开放的国际标准,即为以802.3(以太网)作为列车控制子系统间的接口标准,以802.11作为无线通信接口标准,这两个标准均支持互联网协议(ip)。
CBTC系统目录1. 概述 (2)2. CBTC系统组成 (3)3. CBTC各子系统介绍 (4)3.1. ATS系统 (4)3.1.1. 调度中心系统 (4)3.1.2. 车站系统 (5)3.1.3. 基于CBTC的A TS子系统主要功能特点 (6)3.2. 计算机联锁系统(SICAS) (9)3.3. 列车自动防护系统(ATP) (19)3.3.1. 轨旁子系统 (19)3.3.2. 车载子系统 (20)3.3.3. 子系统功能 (23)4. ATO子系统 (28)4.1. 主要组件 (29)4.1.1. ATO功能 (29)4.1.2. 轨旁设备 (30)4.1.3. 车载设备 (30)4.1.4. 列车运行控制原理 (31)4.1.5. 站停控制 (31)4.1.6. 跳停 (32)4.1.7. 扣车 (32)5. 4. 无线 (32)5.1. 数据通信系统的设计与实现 (33)5.1.1. DCS整体结构 (33)5.1.2. 车地无线通信系统 (34)5.1.3. 车载通信单元 (35)5.1.4. 空间无线通道 (35)6. 系统特点 (36)1.概述概述:CBTC(Communication Based Train Control)系统是一个安全的,具有高可靠性、高稳定性的基于无线的列车自动控制系统,现较广泛的应用于城市轨道交通运输中。
它最大的特点是可以无线通信,由列车-地面间周期传递列车位置信息和地面-列车间传递移动授权来实现功能。
基于通信的列车控制系统(CBTC)包含两种类型一种是基于感应环线的型CBTC,一种是基于无线的CBTC。
基于无线通信的CBTC 系统是指通过无线通信方式(而不是轨道电路),来确定列车位置和实现车-地双向实时通信。
列车通过轨道上的应答器,确定列车绝对位置,轨旁 CBTC 设备,根据各列车的当前位置、运行方向、速度等要素,向所管辖的列车发送“移动授权条件”,即向列车传送运行的距离、最高的运行速度,从而保证列车间的安全间隔距离。