设计牛头刨床中的凸轮机构
- 格式:doc
- 大小:179.50 KB
- 文档页数:10
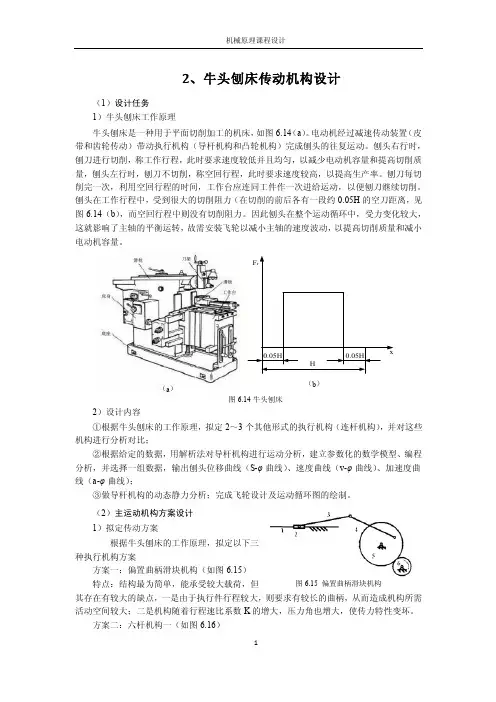
目录一、设计题目 (2)1、牛头刨床的机构运动简图 (2)2、工作原理 (2)二、原始数据 (3)三、机构的设计与分析 (4)1、齿轮机构的设计 (4)2、凸轮机构的设计 (10)3、导杆机构的设计 (16)四、设计过程中用到的方法和原理 (26)1、设计过程中用到的方法 (26)2、设计过程中用到的原理 (26)五、参考文献 (27)六、小结 (28)一、设计题目——牛头刨床传动机构1、牛头刨床的机构运动简图2、工作原理牛头刨床是对工件进行平面切削加工的一种通用机床,其传动部分由电动机经带传动和齿轮传动z0—z1、z1、—z2,带动曲柄2作等角速回转。
刨床工作时,由导杆机构2、3、4、5、6带动刨刀作往复运动,刨头右行时,刨刀进行切削,称为工作行程;刨头左行时,刨刀不进行切削,称为空回行程,刨刀每切削完一次,利用空回行程的时间,固结在曲柄O2轴上的凸轮7通过四杆机构8、9、10与棘轮11和棘爪12带动螺旋机构(图中未画),使工作台连同工件作一次进给运动,以便刨刀继续切削。
二、原始数据设计数据分别见表1、表2、表3.三、机构的设计与分析1、齿轮机构的设计已知条件设计内容与步骤 (1)计算齿轮2z 的齿数由0201'12010102n n z z z z d d i =⨯⨯=(1~1) 得 39644030013161001440n z d z z d n z 2102'1001012=⨯⨯⨯⨯⨯==(2)选择传动类型① ()()40z ~16z 10:按满足不根切、重迭系数.21≥ε、齿顶圆齿厚m 4.0s a ≥、节点位于单齿啮合区4个条件从封闭图中选择变位系数 400.0x 0= 250.0x 1-=0150.0250.0400.0x x 10>=-=+ (1~2)故()()40z ~16z 10采用正传动。
② ()()39z ~13z 2'1:按满足不根切、重迭系数.21≥ε、齿顶圆齿厚m 4.0s a ≥、节点位于单齿啮合区4个条件从封闭图中选择变位系数300.0x '1= 400.0x 2-= 0100.0400.0300.0x x 2'1<-=-=+ (1~3)故()()39z ~13z 2'1采用负传动。
机械原理课程设计——牛头刨床(速度分析与受力分析附于最后)说明书姓名:分析点:4,10点组号:第3组2011 年 7 月 15日工作原理 (3)一.设计任务 (4)二.设计数据 (4)三.设计要求 (4)1、运动方案设计 (4)2、确定执行机构的运动尺寸 (4)3、进行导杆机构的运动分析 (5)4、对导杆机构进行动态静力分析 (5)四.设计方案选定 (5)五. 机构的运动分析 (6)1. 4点速度分析,加速度分析 (7)2. 10点速度,加速度分析 (9)六.机构动态静力分析 (11)七.数据总汇并绘图 (13)九.参考文献 (16)工作原理牛头刨床是一种用于平面切削加工的机床,如图a)所示。
电动机经过皮带和齿轮传动,带动曲柄2和固结在其上的凸轮8。
刨床工作时,由导杆机构2-3-4-5-6带动刨头6和刨刀7作往复运动。
刨头左行时,刨刀不切削,称为空回行程,此时要求速度较高,以提高生产率。
为此刨床采用有急回运动的导杆机构。
刨刀每切削完一次,利用空回行程的时间,凸轮8通过四杆机构1-9-10-11与棘轮带动螺旋机构(图中未画),使工作台连同工件作一次进给运动,以便刨刀继续切削。
刨头在工作过程中,受到很大的切削阻力(在切削的前后各有一段0.05H的空刀距离,见图b),而空回行程中则没有切削阻力。
因此刨头在整个运动循环中,受力变化是很大的,这就影响了主轴的匀速转动,故需安装飞轮来减小主轴的速度波动,以提高切削质量和减少电动机容量。
(a) (b)图d一.设计任务1、运动方案设计。
2、确定执行机构的运动尺寸。
3、进行导杆机构的运动分析。
4、对导杆机构进行动态静力分析。
5、汇总数据画出刨头的位移、速度、加速度线图以及平衡力矩的变化曲线。
二.设计数据本组选择第六组数据表1表2三.设计要求1、运动方案设计根据牛头刨床的工作原理,拟定1~2个其他形式的执行机构(连杆机构),给出机构简图并简单介绍其传动特点。
2、确定执行机构的运动尺寸根据表一对应组的数据,用图解法设计连杆机构的尺寸,并将设计结果和步骤写在设计说明书中。
目录一、课程设计题目二、牛头刨床简介三、导杆机构的运动分析四、导杆机构动态静力分析五、用解析法做导杆机构的运动分析六、Matlab编程并绘图七、凸轮机构的设计八、齿轮机构的设计九、参考文献一、题目:牛头刨床的设计二、牛头刨床简介1. 工作原理及工艺动作过程牛头刨床是一种用于平面切削加工的机床。
刨床工作时,如图(1-1)所示,由导杆机构2-3-4-5-6带动刨头6和刨刀7作往复运动。
刨头右行时,刨刀进行切削,称工作行程,此时要求速度较低并且均匀;刨头左行时,刨刀不切削,称空回行程,此时要求速度较高,以提高生产率。
为此刨床采用有急回作用的导杆机构。
刨头在工作行程中,受到很大的切削阻力,而空回行程中则没有切削阻力。
切削阻力如图(b)所示。
(b)二、设计说明书1.画机构的运动简图1、以O 4为原点定出坐标系,根据尺寸分别定出O 2点,B 点,Y图(1-1)C点。
确定机构运动时的左右极限位置。
曲柄位置图的作法为:取1和8’为工作行程起点和终点所对应的曲柄位置,1’和7’为切削起点和终点所对应的曲柄位置,其余2、3…12等,是由位置1起,顺ω2方向将曲柄圆作12等分的位置(如下图)。
图1-2牛头刨床(方案一)的设计一、导杆机构的运动分析已知:曲柄每分钟转数n2,各构件尺寸及质心位置,且刨头导路x-x位于导杆端点B所作圆弧高的平分线上。
n2=60r/min lo2o4=380mm lo2A=110mm lo4B=540mmlBC=0.25lo4B lo4s4=0.5lo4B xs6=240mm ys6=50mm要求:设计导杆机构,计算机构的行程速比系数k,作机构的运动简图;作机构位置2和6’两个位置的速度多边形和加速度多边形,对导杆机构进行运动分析,作滑块的运动线图。
取μ=0.004m/mm,作机构运动简图如下图1-3所示极位夹角θ=33.7°行程速比系数K=1.46θ=2arcsin(lo2A/lo2o4) 图1-3=2arcsin(110/380)=33.7°K=(180°+θ)/(180°-θ)=1.46(1)当曲柄位于位置2时lo4A=μlo4A=0.004×105=0.420m VA4=0.33m/sV A3=V A2=ω2lo2A=π×60/30×0.11=0.69m/s VA4A3=0.62m/s a .速度分析 Vs4=0.21m/s4A V = 3A V + 34A A V Vc=0.4m/s方向:4BO ⊥ A O 2⊥ //B O 4 5ω=0.74rad/s 大小: ? √ ? 4ω=0.79rad/s 作速度多边形,取速度比例尺μv=0.01(m/s)/mm4A V =μv ⨯4pa =0.01×33=0.33m/s4ω=AO A l V 44=0.33/0.420=0.79rad/s34A A V =μv 43a a l =0.01×62=0.62m/sV 5B = V 4B =4ω⨯B O l 4=0.43m/s由速度影像原理确定点bC V = B V + CB V方向: //'XX B O 4⊥ BC ⊥ 大小: ? √ ?C V =μv ⨯pc l =0.01×40=0.4m/sCB V =μv ⨯bc l =0.01×10=0.1m/s5ω=bcl CBl u V =0.74rad/s Vs4=μvPs4=0.01×21=0.21m/sb.加速度分析4A a = n A a 4 + t A a 4 = 3A a + kA A a 34 + 34r A A a =0.26m/s ²方向:? A →4O B O 4⊥ A →2O B O 4⊥ //B O 4 =0.98 m/s ²大小:? √ ? √ √ ?=2.84 m/s ²由于3A a =22ωA O l 2=4.34m/s ², aA3=4.34 m/s ²KA A a 34=24ω34AA V =0.98m/s ² aA4=2.85 m/s ² n A a 4=24ωA O l 4=0.26m/s ² β4=6.76 m/s ² 作加速度多边形,选取加速度比例尺为a μ=0.05(m/s ²)/mm as4=1.83 m/s ²aB=3.67 m/s ²t A a 4=a μ''a n l =2.84m/s ²,rA A a 34=a μ''a k l =0.05×33=1.65m/s ² aC=3.7 m/s ² 4A a =24ωB O l 4=2.85m/s ²。
《机械基础》综合实训班级姓名学号题号组员课题二牛头刨床执行机构分析与设计设计要求与设计数据1)电动机轴与曲柄轴2平行,刨刀刀刃E点与铰链点C的垂直距离为50mm,使用寿命10年,每日一班制工作,载荷有轻微冲击。
2)为了提高工作效率,在空回程时刨刀快速退回,即要有急回运动,行程速比系数在1.4左右。
为了提高刨刀的使用寿命和工件的表面加工质量,在工作行程时,刨刀要速度平稳,切削阶段刨刀应近似匀速运动。
允许曲柄2转速偏差为±5%。
要求导杆机构的最大压力角应为最小值;3)凸轮机构的最大压力角应在许用值[α]之内,摆动从动件9的升、回程运动规律均为等加速等减速运动。
4)执行构件的传动效率按0.95计算,系统有过载保护。
按小批量生产规模设计。
5)曲柄转速在60r/min,刨刀的行程H在300mm左右为好,具体数据见下表。
(从教材第12页表中选取)已知条件题号1导杆机构运动分析机架l O 2O4380工作行程H310行程速比系数K 1.46 连杆与导杆之比l BC/l B O40.28凸轮机构设计从动件最大摆角δmax15°从动件杆长l O9D125许用压力角[α]40°推程运动角Φ75°远休止角Φs10°回程运动角Φ’75°[任务实施](以教材第12页表中题号1的数据为例。
)任务一 平面机构的结构分析图4-2所示为牛头刨床的结构图,已知滑枕6的导轨高l h =1000mm ,大齿轮2的中心高l h1=540mm ,滑块销3的回转半径r x =240mm 。
绘制主体运动机构的运动简图,并通过自由度的计算,判断其运动的确定性。
解:1、机构分析。
牛头刨床主体运动机构由齿轮传动机构、导杆机构、凸轮机构、棘轮机构等组成,机构示意图如图4-17(a )所示。
图4-17(a ) 牛头刨床主体运动机构示意图2、为了简单地说明问题,下面仅取导杆机构和凸轮机构这部分进行运动简图绘制和自由度计算。
西安科技大学高新学院课程设计报告学院机电信息学院课程机械原理课程设计专业机械设计制造及其自动化班级机单1101班姓名刘亚娟学号 1102060708指导教师程安宁日期 2013年7月19日任务书姓名刘亚娟学号1102060708 专业班级机单1101班题目:牛头刨床的设计完成时间:2013年7月19日具体内容及进度要求:具体内容:1)根据牛头刨床的工作原理,拟定2~3个其他形式的执行机构(连杆机构),并对这些机构进行分析对比。
2)根据给定的数据确定机构的运动尺寸。
要求用图解法设计,并将设计结果和步骤写在设计说明书中。
3)导杆机构的运动分析。
将导杆机构放在直角坐标系下,建立参数化的数学模型,编程分析出刨头6的位移、速度、加速度及导杆4的角速度和角加速度,画出运动曲线,并打印上述各曲线图。
要求将主程序编制过程详细地写在说明书中。
4)导杆机构的动态静力分析。
通过建立机构仿真模型,并给系统加力,编制程序,打印外加力的曲线,并求出最大平衡力矩和功率。
5)凸轮机构设计。
根据所给定的已知参数,确定凸轮的基本尺寸(基圆半径ro 、机架l o2o9和滚子半径rr),并将运算结果写在说明书中。
将凸轮机构放在直角坐标系下,编制程序,求出凸轮机构的实际廓线,打印出从动件运动规律和凸轮机构仿真模型。
6)编写设计说明书一份。
应包括设计任务、设计参数、设计计算过程等。
进度要求: 7月8日查阅资料、熟悉题目 7月9,10日方案分析、比较7月11,12日平面机构尺度综合、运动分析7月15,16日平面动态静力分析7月17,18日绘制方案图、整理设计说明书7月19日答辩指导教师程安宁 2013年 7 月 19 日成绩教师牛头刨床机构设计牛头刨床是平面切削加工机床,如图1。
电动机经皮带和齿轮驱动曲柄2和固结在其上的凸轮8带动刨头6和刨刀7作往复运动。
切削,要求速度较低并且均匀,以减少电动机容量和提高切削质量,刨头左行时为空回行程,要求有急回作用以图1牛头刨床结构及阻力线图提高生产率。
机械原理课程设计设计题目:牛头刨床凸轮机构班级:加工06-2班姓名:井源指导教师:席本强何凡目录1.设计题目及参数2.数学模型的建立3.程序框图4.程序清单及运行结果5.设计总结6.参考文献1设计题目与参数已知摆杆9为等加速等减速运动规律,其推程运动角φ=70,远休止角φs =10,回程运动角φ΄=70,摆杆长度l 09D =125,最大摆角φmax =15,许用压力角[α]=40,凸轮与曲线共轴。
要求:(1) 计算从动件位移、速度、加速度并绘制线图(用方格纸绘制),也可做动态显示。
(2) 确定凸轮的基本尺寸,选取滚子半径,画出凸轮的实际廓线,并按比例绘出机构运动简图。
(3) 编写计算说明书。
2数学模型(1) 推程等加速区当2/0ϕδ≤≤时 22max /21ϕδϕ=m (角位移) 2max /4ϕδϕω=(角速度)2max /4ϕϕε=(角加速度)(2) 推程等减速区当ϕδϕ≤<2/时 22max max /)(21ϕδϕϕϕ--=m (角位移)2max /)(4ϕδϕϕω-=(角速度) 2max /4ϕϕε-=(角加速度) (3) 远休止区当s ϕϕδϕ+≤<时 max 1ϕ=m (角位移) 0=ω (角速度)0=ε(角加速度)(4) 回程等加速区 当/ϕϕϕδϕϕ'++≤<+s s 时22max max /)(21ϕϕϕδϕϕ'---=s m (角位移)2max /)(4ϕϕϕδϕω'---=s (角速度)2max /4ϕϕε'-=(角加速度)(5) 回程等减速区 当ϕϕϕδϕϕϕ'++≤<'++s s 2/时22max /)(21ϕδϕϕϕϕ'-'++=s m (角位移)2max /)(4ϕδϕϕϕϕω'-'++-=s (角速度) 2max /4ϕϕε'=(角加速度) (6) 近休止区01=m (角位移) 0=ω(角速度)0=ε(角加速度)一、如图选取xOy 坐标系,B1点为凸轮轮廓线起始点。
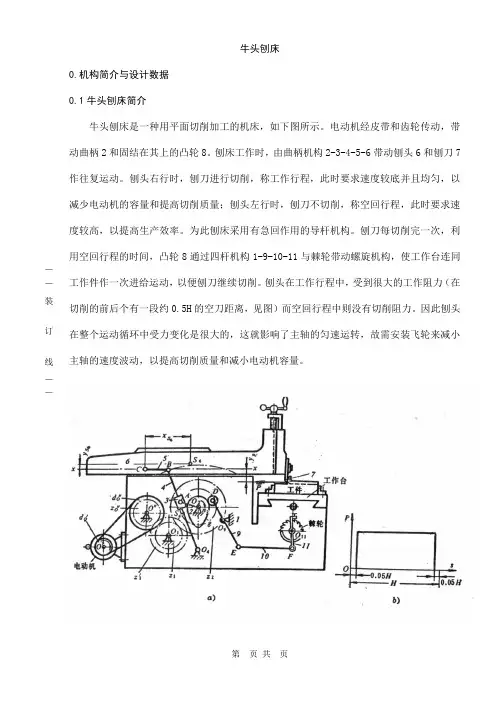
牛头刨床0.机构简介与设计数据 0.1牛头刨床简介牛头刨床是一种用平面切削加工的机床,如下图所示。
电动机经皮带和齿轮传动,带动曲柄2和固结在其上的凸轮8。
刨床工作时,由曲柄机构2-3-4-5-6带动刨头6和刨刀7作往复运动。
刨头右行时,刨刀进行切削,称工作行程,此时要求速度较底并且均匀,以减少电动机的容量和提高切削质量;刨头左行时,刨刀不切削,称空回行程,此时要求速度较高,以提高生产效率。
为此刨床采用有急回作用的导杆机构。
刨刀每切削完一次,利用空回行程的时间,凸轮8通过四杆机构1-9-10-11与棘轮带动螺旋机构,使工作台连同工作件作一次进给运动,以便刨刀继续切削。
刨头在工作行程中,受到很大的工作阻力(在切削的前后个有一段约0.5H 的空刀距离,见图)而空回行程中则没有切削阻力。
因此刨头在整个运动循环中受力变化是很大的,这就影响了主轴的匀速运转,故需安装飞轮来减小主轴的速度波动,以提高切削质量和减小电动机容量。
— —装订线— —牛头刨床机构简图及其阻力曲线0.2设计数据运动分析数据导杆机构的动态静力分析数据凸轮机构设计数据飞轮转动惯量确定数据1.导杆机构的运动分析已知 曲柄每分钟的转数n 2,各构件的尺寸及重心位置,且刨头导路x-x 位于导杆端点B 所作圆弧高的平分线上(见图) .要求 做出机构的运动简图,用解析法和图解法求出方案Ⅰ中1′+10°和9位置的速度、加速度,并对结果进行误差分析。
1.1矢量方程图解法用CAD 按一定的比例绘制机构位置机构简图及相应的速度和加速度多边形图,并量出个对应量进行对矢量方程的所求得的结果分析误差。
矢量方程图解法: 其中l 2=l AO2, l 4=l BO4,l 5=l BC ,v B =v B4=v B5, a B = a B4=a B5 (1) 速度(2)加速度1.2矩阵法建立直角坐标系,标出各杆矢量及方位角。
其中共有四个未知量θ4,θ5,s4,s C.建立两个封闭矢量方程,为此需用两个封闭图形O2AO4及O4BCEO4,由此可得l6+l2=s4, l4+l5=l6′+s C写成投影方程为S4cosθ4=l2cosθ2S4sinθ4=l6+l2sinθ2l 4cosθ4+l5cosθ5-s E=0l 4sinθ4+l5sinθ5=l′6以上个式即可求得θ4、θ5、s4及s E四个运动变量。
机械原理课程设计编程说明书设计题目:牛头刨床凸轮机构设计指导教师:席本强何凡设计者:康政学号:班级:加工06-22008年7月9日辽宁工程技术大学目录1. 设计任务及要求 (2)2. 数学模型的建立 (3)3. 程序框图 (5)4. 程序清单及运行结果 (5)5. 参考文献 (17)6. 设计总结 (17)7. 标题栏 (19)凸轮机构的设计1.基本条件与要求已知: 从动件的最大摆角 max Φ 许用压力角][α,从动件的长度D o l 9,推程运动角ϕ,远休止角ϕs ,回程运动角ϕ,从动件见运动规律为等加、等减速运动,凸轮与曲柄共轴。
要求: 1) 计算从动件位移、速度、加速度并绘制线图,也可做动态显示。
2) 确定凸轮机构的基本尺寸,选取滚子半径,画出凸轮实际轮廓线,并按比例绘出机构运动简图,以上内容作在2号图纸上。
3) 编写说明书2.数学模型的建立1.设从动件起始角.300=Φ2. 1),2/1Φ<Φ升程加速区,其运动方程为:);1*1max/(*4:)1*1/(max**4:)2*1/(*max *2ΦΦΦ=ΦΦΦΦ=ΦΦΦΦΦ=Φεω2),12/1Φ<Φ<=Φ 属于升程减速区,其运动方程为::1*1m ax /*4:1*1/)1(m ax **4:)1*1/()1(*)1(m ax **2m ax ΦΦΦ-=ΦΦΦ-ΦΦ=ΦΦΦ-ΦΦ-ΦΦ-Φ=Φεω3),211Φ+Φ<Φ<=Φ,属于远休止区,其运动方程为::0:0:max ==Φ=Φεω4)),2/321()21(Φ+Φ+Φ<Φ<=Φ+Φ属于回程加速区,其运动方程为::)3*3max/(*4:)3*3/()]21([max**4:)3*3/()]21([*)]21([max *2max ΦΦΦ-=ΦΦΦ+Φ-ΦΦ=ΦΦΦ+Φ-ΦΦ+Φ-ΦΦΦ-Φ=Φεω 5))321()2/321(Φ+Φ+Φ<Φ<=Φ+Φ+Φ,属于回程减速区,其运动方程为::)3*3max/(*4:)3*3/()321(max**4:)3*3/()321(*)321(max**2ΦΦΦ=ΦΦΦ-Φ+Φ+ΦΦ-=ΦΦΦ-Φ+Φ+ΦΦ-Φ+Φ+ΦΦ=Φεω6)360)321(<Φ<=Φ+Φ+Φ ,于近休止区,其运动方程为:0:0:0===Φεω3.程序框图4.程序清单及运行结果1)源程序#include<math.h>#include<dos.h>#include<graphics.h>#include<conio.h>#include<stdio.h>#define I 135.0#define Aa 42#define rb 50#define rr10#define K (3./180)#define dt 0.25float Qmax,Q1,Q2,Q3;float Q_a;double L,pr;float e[1500],f[1500],g[1500];void Cal(float Q,double Q_Q[3]){Qmax=15,Q1=75,Q2=10,Q3=70;if(Q>=0&&Q<=Q1/2){Q_Q[0]=K*(2*Qmax*Q*Q/(Q1*Q1));Q_Q[1]=4*Qmax*Q/(Q1*Q1);Q_Q[2]=4*Qmax/(Q1*Q1);}if(Q>Q1/2&&Q<=Q1){Q_Q[0]=K*(Qmax-2*Qmax*(Q-Q1)*(Q-Q1)/(Q1*Q1));Q_Q[1]=4*Qmax*(Q1-Q)/(Q1*Q1);Q_Q[2]=-4*Qmax/(Q1*Q1);}if(Q>=Q1&&Q<=Q1+Q2){Q_Q[0]=K*Qmax;Q_Q[1]=0;Q_Q[2]=0;}if(Q>Q1+Q2&&Q<=Q1+Q2+Q3/2){Q_Q[0]=K*(Qmax-2*Qmax*(Q-Q1-Q2)*(Q-Q1-Q2)/(Q3*Q3)); Q_Q[1]=-4*Qmax*(Q-Q1-Q2)/(Q3*Q3);Q_Q[2]=-4*Qmax/(Q3*Q3);}if(Q>Q1+Q2+Q3/2&&Q<Q1+Q2+Q3){Q_Q[0]=K*(2*Qmax*(Q3-Q+Q1+Q2)*(Q3-Q+Q1+Q2)/(Q3*Q3)); Q_Q[1]=-4*Qmax*(Q3-Q+Q1+Q2)/(Q3*Q3);Q_Q[2]=4*Qmax/(Q3*Q3);}if(Q>Q1+Q1+Q3&&Q<=360){Q_Q[0]=K*0;Q_Q[1]=0;Q_Q[2]=0;}}void Draw(float Q_m){float tt,x,y,x1,y1,x2,y2,x3,x4,y3,y4,dx,dy;double QQ[3];circle(240,240,5);circle(240+L*sin(60*K),240-L*cos(60*K),5);moveto(240,240);lineto(240+20*cos(240*K),240-20*sin(240*K));lineto(260+20*cos(240*K),240-20*sin(240*K));lineto(240,240);moveto(240+L*sin(60*K),240-L*cos(60*K));lineto(240+L*sin(60*K)+20*cos(240*K),240-L*cos(60*K)-20*sin(2 40*K));lineto(240+L*sin(60*K)+20*cos(60*K),240-L*cos(60*K)-20*sin(24 0*K));lineto(240+L*sin(60*K),240-L*cos(60*K));for(tt=0;tt<=720;tt=tt+2){Cal(tt,QQ);/*tulunlunkuoxian*/x1=L*cos(tt*K-30*K)-I*cos(Q_a+QQ[0]+tt*K-30*K);y1=I*sin(Q_a+QQ[0]+tt*K-30*K)-L*sin(tt*K-30*K);x2=x1*cos(Q_m*K)-y1*sin(Q_m*K);y2=x1*sin(Q_m*K)+y1*cos(Q_m*K);putpixel(x2+240,240-y2,2);dx=(QQ[1]+1)*I*sin(Q_a+QQ[0]+tt*K-30*K)-L*sin(tt*K-30*K); dy=(QQ[1]+1)*I*cos(Q_a+QQ[0]+tt*K-30*K)-L*cos(tt*K-30*K); x3=x1+rr*dy/sqrt(dx*dx+dy*dy);y3=y1-rr*dx/sqrt(dx*dx+dy*dy);x4=x3*cos(Q_m*K)-y3*sin(Q_m*K);y4=x3*sin(Q_m*K)+y3*cos(Q_m*K);putpixel(x4+240,240-y4,YELLOW);}}void Curvel(){int t;float y1,y2,y3,a=0;for(t=0;t<=360/dt;t++){delay(300);a=t*dt;if(a>=0&&a<=Q1/2){y1=(2*Qmax*pow(a,2)/pow(Q1,2))*10;y2=(4*Qmax*(dt*K)*a/pow(Q1,2))*pow(10,4.8);y3=(4*Qmax*pow((dt*K),2)/pow(Q1,2))*pow(10,8.5); putpixel(100+a,300-y2,2);putpixel(100+a,300-y3,4);line((100+Q1+Q2+Q3),300-y3,(100+Q1+Q2+Q3),300); line((100+Q1+Q2+Q3/2),300,(100+Q1+Q2+Q3/2),300-y3); }if((a>Q1+Q2+Q3)&&(a<=360)){y1=0;y2=0;y3=0;putpixel(100+a,300,1); putpixel(100+a,300,2); putpixel(100+a,300,4);}e[t]=y1;f[t]=y2;g[t]=y3;}}main(){int gd=DETECT,gm;int i,t,choice,x_I,y_I,flag=1; double QQ1[3],aa; initgraph(&gd,&gm,""); cleardevice();for(t=0;!kbhit();t++){for(;t<360;)t-=360;if(flag==1)for(L=I-rb+70;L<I+rb;L+=2){Q_a=acos((L*L+I*I-rb*rb)/(2.0*L*I));Cal(t,QQ1);aa=atan(1*(1-QQ1[1]-L*cos(Q_a-QQ1[0]))/(L*sin(Q_a+QQ1[0]))); pr=(pow((L*L+I*I*(1+QQ1[1])*(1+QQ1[1])-2.0*L*I*(1+QQ1[1]*c os(Q_a+QQ1[0]))),3.0/2))/((1+QQ1[1])*(2+QQ1[1])*L*I*cos(Q_a+QQ1[0])+QQ1[2]*L*I*sin (Q_a+QQ1[0])-L*L-I*I*pow(1+QQ1[1],3));if(aa<=Aa&&pr>rr)flag=0;break;}if(flag==0)Cal(t,QQ1);Draw(t);cleardevice();x_I=240+L*sin(60*K)-I*cos(Q_a+QQ1[0]-30*K);y_I=240-L*cos(60*K)-I*sin(Q_a+QQ1[0]-30*K);circle(x_I,y_I,rr);line(240+L*sin(60*K),240-L*cos(60*K),x_I,y_I);delay(1);}getch();cleardevice();line(100,80,100,445);line(70,300,530,300);line(100,80,98,90);line(100,80,102,90);line(520,298,530,300);line(520,302,530,300);setcolor(2);outtextxy(300,150," ");printf("\n\n\n\n\n\Q(w,t)");printf("\n\n\n\n\n\n\n\n\n\n\n\n\n\n\t\t\t \t\t\t\t\tt");Curvel();getch();printf("\n\n\n\n\n\n\n\n\n\n");or(i=0;i<=1440;i=i+20){delay(1000);{printf("%d%f%f%f\n",i/4,e[i],f[i],g[i]);}getch();}closegraph();}2)曲线图象及输出数据5.参考文献1).《机械原理》孙桓、陈作模、葛文杰,高等教育出版社,2005.122).《C程序设计》谭浩强,高等教育出版社,1988.126.设计总结设计总结一周的课程设计马上就结束了,就我个人而言,我想通过本次课程设计对我两年来在大学学到的知识做一次小结,同时为将来工作进行一次适应性训练,从中锻炼自己分析问题、解决问题的能力,为今后自己的研究生生活打下一个良好的基础。
实用标准文档湖南农业大学机械原理课程设计简易牛头刨床机构设计说明书06级机械设计及自动化专业指导老师: 高英武姓名:蒋毅学号:2006406011052008 年5 月目录第一部分:设计任务书——————————————————————21.设计课题2.运动要求与基本数据3.设计任务第二部分:机构方案的确定————————————————————31.机床往复运动方案的确定2.传动方案的确定3.总传动比1)各级传动比的分配2)传动方案示意图第三部分:运动循环图设计————————————————————6第四部分:主要机构的设计计算——————————————————71.往复运动机构设计和运动误差分析1)检验r min≥70o2)运动分析3)往复运动H的调整措施2.进击运动的驱动机构——凸轮机构的设计1)根据运动循环图确定δo 、δs、δo’、δs2)确定r0、A、L、φmax3)凸轮轮廓曲线设计3.传动系统的低速级齿轮设计计算4.进给机构的间歇运动机构运动设计(棘轮机构+螺旋机构)第五部分:对整机设计对结果分析————————————————14第六部分:收获体会、建议————————————————————14第七部分:参考文献———————————————————————14第八部分: 附程序————————————————————————16第九部分: 附A3的图纸—————————————————————15第一部分:设计任务书第二部分:机构方案的设计设计任务设计一种简易牛头刨床,列出几种不同的组合方案,对组合方案进行定性分析,从中选出最佳方案。
接下来从传动系统来设计三联滑动齿轮机构,从而实现三种速度的转变;设计出运动循环图,最后对主要机构进行设计计算:分别从往复运动(构件尺寸、运动误差分析、检验r min 、运动分析、往复行程H 的调整措施);进给机构的驱动机构——凸轮机构的设计(摆动从动件的运动规律、运动循环图来确定δo 、δs 、δo ’ 、δs ’、确定r 0、A 、L 、φmax 等参数、凸轮轮廓的曲线设计、凸轮安装角的设计简图及说明);传动系统齿轮设计的计算;进给机构的间歇运动机构运动设计(棘轮机构+螺旋机构)。
机械原理课程设计牛头刨床(完整图纸)机械原理课程设计说明书系部名称: 机电系专业班级: 04机制三班姓名:学号: 0405110057目录概述 (3)设计项目...............................1.设计题目 (4)2.机构简介 (4)3.设计数据 (4)设计内容·······························1.导杆机构的设计 (5)2.凸轮机构的设计 (12)3.齿轮机构的设计 (17)设计体会 (20)参考文献 (21)附图·····························概述一、机构机械原理课程设计的目的:机械原理课程设计是高等工业学校机械类专业学生第一次较全面的机械运动学和动力学分析与设计的训练,是本课程的一个重要实践环节。
其基本目的在于:(1)进一步加深学生所学的理论知识,培养学生独立解决有关本课程实际问题的能力。
(2)使学生对于机械运动学和动力学的分析设计有一较完整的概念。
(3)使学生得到拟定运动方案的训练,并具有初步设计选型与组合以及确定传动方案的能力。
(4)通过课程设计,进一步提高学生运算、绘图、表达、运用计算机和查阅技术资料的能力。
二、机械原理课程设计的任务:机械原理课程设计的任务是对机械的主体机构(连杆机构、凸轮机构、齿轮机构以及其他机构)进行设计和运动分析、动态静力分析,并根据给定机器的工作要求,在此基础上设计凸轮、齿轮;或对各机构进行运动分析。
任务三设计牛头刨床中的凸轮机构%一.凸轮机构的设计要求概述:⒈已知摆杆9作等加速等减速运动,要求确定凸轮机构的基本尺寸,选取滚子半径,手工或用CAD软件画出从动件运动规律角位移线图和凸轮的实际轮廓。
该凸轮机构的从动件运动规律为等加速等减速运动。
各数据如表:符号ψmax l O9D l O9O2 r o r t Φ Φs Φ’单位°mm ° 数据 15 126 150 61 15 65 10 65二.从动件运动规律角位移线图的画法:①、绘制坐标轴。
取凸轮转角的比例尺μφ =.2.6°/mm ,在Φ轴上分别量取Φ=65°、Φs=10°、Φ’=65°;取螺杆摆角的比例尺μψ=1°/mm 。
在ψ轴上量取ψmax =15°; ②、将Φ=65°、Φ’=65°分别等分成5等分,则得各等分点1、2…10。
③、绘制推程的位移线图。
过3点作ψ轴的平行线,在该平行线上截取线段高度为ψmax =15°,将该线段等分成6等分(注意应与角Φ的等分数相同),得各等分点,如前半推程的1'、2'、3'; 将坐标原点分别与点1'、2'、3'相连,得线段O1'、O2'和03',分别与过1、2、3点且平行与Ψ轴的直线交于1"、2"和3";将点0、1"、2"、3"连成光滑的曲线,即为等加速运动的位移曲线的部分,后半段等减速运动的位移曲线的画法与之相似,只是弯曲方向反过来,见图。
同理可得回程的位移曲线。
(.)φ(.)三、摆动从动件盘形凸轮轮廓设计:⑴设计原理设计凸轮轮廓依据反转法原理。
即在整个机构加上公共角速度(-ω)(ω为原凸轮旋转角速度)后,将凸轮固定不动,而从动件连同机架将以(-ω)绕凸轮轴心O2逆时针方向反转,与此同时,从动件将按给定的运动规律绕其轴心O9相对机架摆动,则从动件的尖顶在复合运动中的轨迹就是要设计的凸轮轮廓。
机械原理课程设计设计题目:牛头刨床凸轮机构设计目录1.设计任务及要求------------------------------ 2.数学模型的建立------------------------------ 3.程序框图--------------------------------------- 4.程序清单及运行结果------------------------ 5.设计总结--------------------------------------- 6.参考文献--------------------------------------1设计任务与要求已知摆杆为等加速等减速运动规律,其推程运动角φ=70,远休止角φs =10,回程运动角φ΄=70,摆杆长度l 09D =135,最大摆角φmax =15,许用压力角[α]=38,凸轮与曲线共轴。
要求:(1) 计算从动件位移、速度、加速度并绘制线图(用方格纸绘制),也可做动态显示。
(2) 确定凸轮的基本尺寸,选取滚子半径,画出凸轮的实际廓线,并按比例绘出机构运动简图。
(3) 编写计算说明书。
2数学模型(1) 推程等加速区当2/0ϕδ≤≤时,22max /21ϕδϕ=m (角位移),2max /4ϕδϕω=(角速度) 2max /4ϕϕε=(角加速度)(2) 推程等减速区当ϕδϕ≤<2/时,22max max /)(21ϕδϕϕϕ--=m (角位移)2max /)(4ϕδϕϕω-=(角速度),2max /4ϕϕε-=(角加速度)(3) 远休止区当s ϕϕδϕ+≤<时 max 1ϕ=m (角位移),0=ω (角速度)0=ε(角加速度)(4) 回程等加速区当2/ϕϕϕδϕϕ'++≤<+s s 时,22max max /)(21ϕϕϕδϕϕ'---=s m (角位移) 2max /)(4ϕϕϕδϕω'---=s (角速度),2max /4ϕϕε'-=(角加速度)(5) 回程等减速区当ϕϕϕδϕϕϕ'++≤<'++s s 2/时,22max /)(21ϕδϕϕϕϕ'-'++=s m (角位移)2max /)(4ϕδϕϕϕϕω'-'++-=s (角速度),2max /4ϕϕε'=(角加速度)(6) 近休止区01=m (角位移),0=ω(角速度) 0=ε(角加速度)一、如图选取xOy 坐标系,B1点为凸轮轮廓线起始点。
《机械原理课》程设计报告仲恺农业工程学院《机械原理》课程设计报告题目:牛头刨床设计专业:班级:学号:姓名:指导教师:目录工作原理 (3)设计要求 (3)设计内容及工作量 (4)一.连杆机构的对比 (5)二. 拟定机械传动方案 (6)三. 机械运动方案示意图 (6)四. 机构运动简图 (7)五. 导杆机构的运动分析 (8)六. 导杆机构的动静力分析 (12)七. 凸轮机构的设计 (13)八. 总结 (15)九.参考文献 (15)工作原理:牛头刨床是一种靠刀具的往复直线运动及工作台的间歇运动来完成工件的平面切削加工的机床。
图1是参考示意图。
电动机经过减速传动装置带动执行机构(导杆机构和凸轮机构)完成刨刀的往复运动和间歇运动。
刨床工作时,刨头由曲柄带动右行,刨刀进行切削,称为工作行程。
在切削行程H中,前后各有一段0.05H的空刀距离,工作阻力F 为常数;刨刀左行时,即为空回行程,此行程无工作阻力。
在刨刀空回行程时,由摆动从动件盘形凸轮机构通过四杆机构驱动棘轮机构,棘轮机构带动螺旋机构使工作台连同工件在垂直纸面方向上做一次进给进给运动,以便刨刀继续切削。
设计要求:电动机轴与曲柄轴平行,刨刀刀刃点与铰链点的垂直距离为50mm,使用寿命10年,每日一班制工作,载荷有轻微冲击。
允许曲柄转速偏差为±5%。
要求导杆机构的最大压力角应为最小值;凸轮机构的最大压力角应在许用值[α]之内,摆动从动件的升、回程运动规律均为等加速、等减速运动。
执行构件的传动效率按0.95计算,系统有过载保护。
按小批量生产规模设计。
导杆机构运动分析转速n2(r/min) 工作行程H(mm) 行程速比系数K50 300 1.38凸轮机构运动分析从动件最大摆角ϕmax(°)摆动从动件杆长许用压力角[α](°)推程运动角δ0(°)远休止角δs(°)回程运动角δ0’ (°)15 128 41 62 10 60导杆机构运动动态静力分析工作阻力F max(N) 导杆质量m4(kg) 滑块6质量m6(kg) 导杆4质心转动惯量J s4(kgm2) 4600 20 80 1.2设计内容及工作量:1、根据牛头刨床的工作原理,拟定2~3个其他形式的执行机构(连杆机构),并对这些机构进行分析对比。
三、机构选型、方案分析及方案的确定方案一的运动分析及评价(1)运动是否具有确定的运动该机构中构件n=5。
在各个构件构成的的运动副中Pl=6,Ph=1.凸轮和转子、2杆组成运动副中有一个局部自由度,即F'=1。
机构中不存在虚约束。
.由以上条件可知:机构的自由度 F=3n-(2Pl+Ph-p')-F'=1机构的原动件是凸轮机构,原动件的个数等于机构的自由度,所以机构具有确定的运动。
(2)机构传动功能的实现在原动件凸轮1带动杆2会在一定的角度范围内摇动。
通过连杆3推动滑块4运动,从而实现滑块(刨刀)的往复运动。
(3)主传动机构的工作性能凸轮1的角速度恒定,推动2杆摇摆,在凸轮1随着角速度转动时,连杆3也随着杆2的摇动不断的改变角度,使滑块4的速度变化减缓,即滑块4的速度变化在切削时不是很快,速度趋于匀速;在凸轮的回程时,只有惯性力和摩擦力,两者的作用都比较小,因此,机构在传动时可以实现刨头的工作行程速度较低,而返程的速度较高的急回运动。
传动过程中会出现最小传动角的位置,设计过程中应注意增大基圆半径,以增大最小传动角。
机构中存在高副的传动,降低了传动的稳定性。
(4)机构的传力性能要实现机构的往返运动,必须在凸轮1和转子间增加一个力,使其在回转时能够顺利的返回,方法可以是几何封闭或者是力封闭。
几何封闭为在凸轮和转子设计成齿轮形状,如共扼齿轮,这样就可以实现其自由的返回。
机构在连杆的作用下可以有效的将凸轮1的作用力作用于滑块4。
但是在切削过程中连杆3和杆2也受到滑块4的作用反力。
杆2回受到弯力,因此对于杆2的弯曲强度有较高的要求。
同时,转子与凸轮1的运动副为高副,受到的压强较大。
所以该机构不适于承受较大的载荷,只使用于切削一些硬度不高的高的小型工件。
该机构在设计上不存在影响机构运转的死角,机构在运转过程中不会因为机构本身的问题而突然停下。
(5)机构的动力性能分析。
由于凸轮的不平衡,在运转过程中,会引起整个机构的震动,会影响整个机构的寿命。
导杆机构的设计
52邹加利:三维零件绘图,凸轮所需的计算,35%
22劳毅麟;组装,尺寸修改,导杆机构制作35%
18黄伟宗:凸轮CAD制作·Pro/E制作15%
23梁永豪:凸轮CAD制作,凸轮机构的计算,检查,修改15%
一、尺寸参数确定依据及过程:
行程速比系数或压力角确定。
尺度综合过程如下:
⑴由K=1.5求得极位夹角θ;
⑵由导杆机构特性知道,导杆摆角等于极位夹角,即ψmax=θ;
⑶由行程H和θ可求出导杆长l BO4;
⑷由刨刀的行程H和θ可求出曲柄长l AO2;
⑸由连杆与导杆之比l BC/l B O4=0.2~0.3可求出连杆长L BC;
⑹为使杆组的压力角较小,滑块C的导路x-x位于导杆端点。
B所作的圆弧高的平分线上,以此确定导路的高度y
CO4
二、确定传动机构的尺寸
已知条件:机架l O2O4=390 mm,刨刀的行程H=390 mm,;行程速比系数K=1.5;连杆与导杆之比l BC/l B O4=0.33
1).根据所给数据确定机构尺寸 极位夹角:οθ
361
5.11
5.118011180=+-=+-=︒︒
k k 导杆长度:41390165022sin18
sin 2
BO H l mm θ===
连杆长度:BC l =0.33 4BO l =214.5mm 曲柄长度:224sin 390*sin181172
AO O O l l mm θ===
已知刨头导路x-x 位于导杆端点B 所作的圆弧高的平分线上。
(这样才能保证机构运动过程的最大压力角具有最小值,使机构在运动过程中具有良好的传动力特性)所以,
()444111cos 650*6501cos18633.75222CO BO BO y L l mm θ⎛
⎫=--=--= ⎪⎝
⎭
即导轨滑块C 到O4的垂直距离为633.75mm 。
(此图可用Flashpaper导出)
2).机构运动简图的绘制
选取一长度比例尺,如图所示。
B
A
O4
任务三设计牛头刨床中的凸轮机构
%
一.凸轮机构的设计要求概述:
⒈已知摆杆9作等加速等减速运动,要求确定凸轮机构的基本尺寸,选取滚子半径,手工或用CAD软件画出从动件运动规律角位移线图和凸轮的实际轮廓。
该凸轮机构的从动件运动规律为等加速等减速运动。
各数据如表:
符
ψmax l O9D l O9O2r o r tΦΦs Φ’号
单
°mm °位
数
15 126 150 61 15 65 10 65
据
二.从动件运动规律角位移线图的画法:
①、绘制坐标轴。
取凸轮转角的比例尺μφ=.2.6°/mm,在Φ轴上分别量取Φ=65°、Φs=10°、Φ’=65°;取螺杆摆角的比例尺μψ=1°/mm。
在ψ轴上量取ψmax =15°;
②、将Φ=65°、Φ’=65°分别等分成5等分,则得各等分点
1、2…10。
③、绘制推程的位移线图。
过3点作ψ轴的平行线,在该平行线上截取线段高度为ψmax =15°,将该线段等分成6等分(注意应与角Φ的等分数相同),得各等分点,如前半推程的1'、2'、3';将坐标原点分别与点1'、2'、3'相连,得线段O1'、O2'和03',分别与过1、2、3点且平行与Ψ轴的直线交于1"、2"和3";将点0、1"、2"、3"连成光滑的曲线,即为等加速运动的位移曲线的部分,后半段等减速运动的位移曲线的画法与之相似,只是弯曲方向反过来,见图。
同理可得回程的位移曲线。
(.)
φ
(.)
三、摆动从动件盘形凸轮轮廓设计:
⑴设计原理
设计凸轮轮廓依据反转法原理。
即在整个机构加上公共角速度(-ω)(ω为原凸轮旋转角速度)后,将凸轮固定不动,而从动件连同机架将以(-ω)绕凸轮轴心O2逆时针方向反转,与此同时,从动件将按给定的运动规律绕其轴心O9相对机架摆动,则从动件的尖顶在复合运动中的轨迹就是要设计的凸轮轮廓。
⑵设计凸轮轮廓的步骤如下:
在图所示的摆动从动件角位移曲线中,其纵坐标表示从动件角位移Ψ,它按角度比例尺μΨ画出。
μΨ=从动件摆角/图上代表该摆角的线段长度=1 (°/mm)
①将ψ-φ曲线图(如图(1))的推程运动角和回程运动角各分成4等份,按式求出各等分点对应的角位移值:Ψ1=μΨΨ11′、Ψ2=μΨΨ22′,……。
其数值见表(1)。
表1 各点的角位移数值
②选取适当的长度比例尺μl定出O2和O9的位置。
以O2为圆心,以r0/μl为半径作基圆。
以O9为圆心,以l O9D/μl为半径,作圆弧交基圆于D O(D’O)点。
则O9D O便是从动件的起始位置。
注意,图示位置D O位于中心连线O2O9的左侧,从动件在推程中将按顺时针方向摆动。
③以O2为圆心,以l O9O2/μl为半径作圆,沿(-ω)[即为逆时针方向]自O2O9开始依次取推程运动角Φ0=65°,远休止角
Φs=10°,回程运动角Φo’=65和远休止角Φs’=220°,并将推程和回程运动角各分成4等份(与角位移线图相对应的等份),得O91 ,O92, O93……O99各点。
它们便是逆时针方向反转时,从动体轴心的各个位置。
④分别以O91,O92, O93……O99为圆心,以l O9D/μl为半径画圆弧,它们分别与基圆相于D’1,D’2,D’3……D’9,并作∠D’1O91D1,∠D’2O92D2……分别等于摆杆角位移Ψ1、Ψ2……。
并使O91D1= O91 D’1,O92D2= O92D’2,……。
则得D1,D2,……D9(与D’9重合)各点。
将这些点连成光滑的曲线,便是凸轮的理论轮廓。
⑤在上述求得的理论轮廓线上,分别以该轮廓线上的点为圆心,以滚子半径为半径,作一系列滚子圆。
作该系列圆的内包络线,即为凸轮的实际轮廓,如图。
此图用CAD画
此图用CAD画。