水轮机调节ppt课件
- 格式:ppt
- 大小:2.06 MB
- 文档页数:16
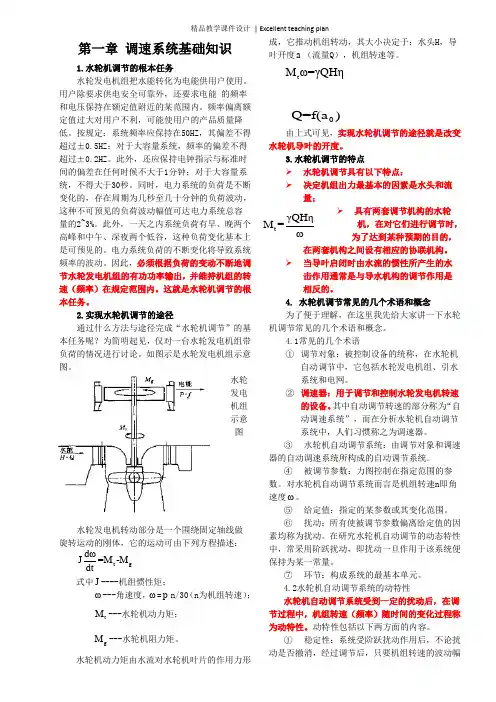
第一章 调速系统基础知识1.水轮机调节的根本任务 水轮发电机组把水能转化为电能供用户使用。
用户除要求供电安全可靠外,还要求电能 的频率和电压保持在额定值附近的某范围内。
频率偏离额定值过大对用户不利,可能使用户的产品质量降低。
按规定:系统频率应保持在50HZ ,其偏差不得超过±0.5HZ :对于大容量系统,频率的偏差不得超过±0.2HZ 。
此外,还应保持电钟指示与标准时间的偏差在任何时候不大于1分钟;对于大容量系统,不得大于30秒。
同时,电力系统的负荷是不断变化的,存在周期为几秒至几十分钟的负荷波动,这种不可预见的负荷波动幅值可达电力系统总容量的2~3%。
此外,一天之内系统负荷有早、晚两个高峰和中午、深夜两个低谷,这种负荷变化基本上是可预见的。
电力系统负荷的不断变化将导致系统频率的波动。
因此,必须根据负荷的变动不断地调节水轮发电机组的有功功率输出,并维持机组的转速(频率)在规定范围内。
这就是水轮机调节的根本任务。
2.实现水轮机调节的途径 通过什么方法与途径完成“水轮机调节”的基本任务呢?为简明起见,仅对一台水轮发电机组带负荷的情况进行讨论。
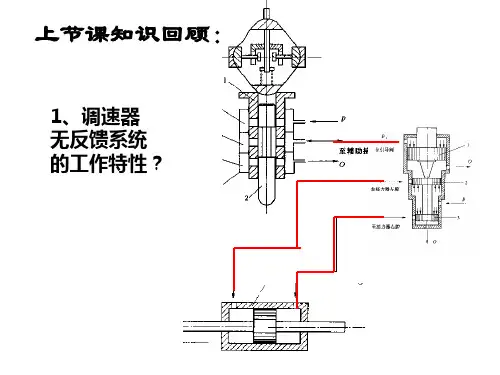
如图示是水轮发电机组示意图。
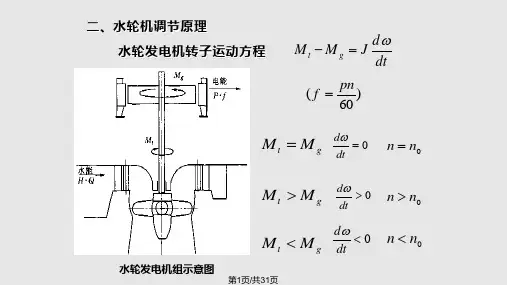
水轮发电机组示意图 水轮发电机转动部分是一个围绕固定轴线做旋转运动的刚体,它的运动可由下列方程描述:式中J ----机组惯性矩;ω---角速度,ω=p n/30(n 为机组转速);t M ---水轮机动力矩; g M ---水轮机阻力矩。
水轮机动力矩由水流对水轮机叶片的作用力形成,它推动机组转动,其大小决定于:水头H ,导叶开度a (流量Q ),机组转速等。
由上式可见,实现水轮机调节的途径就是改变水轮机导叶的开度。
3.水轮机调节的特点 ➢ 水轮机调节具有以下特点: ➢ 决定机组出力最基本的因素是水头和流量; ➢ 具有两套调节机构的水轮机,在对它们进行调节时,为了达到某种预期的目的,在两套机构之间设有相应的协联机构。


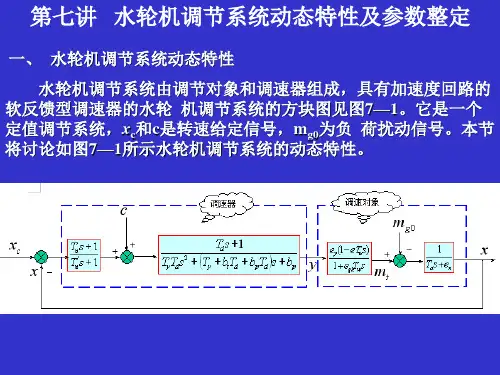
第七讲水轮机调节系统动态特性及参数整定一、水轮机调节系统动态特性水轮机调节系统由调节对象和调速器组成,具有加速度回路的软反馈型调速器的水轮机调节系统的方块图见图7—1。
它是一个定值调节系统,x c 和c 是转速给定信号,m g0为负荷扰动信号。
本节将讨论如图7—1所示水轮机调节系统的动态特性。
具有加速度回路的软反馈型调速器的传递函数为设b p =0,T y =0,T'n =0,则即具有PID 型调节规律。
11])([1)()()('2+++++++==s T s T b s T b b T s T T s T s x s Y s G n n p d p t y d y d c r sb T s T b T b T T s x s Y s G tnd t d t d n c r +++≈=1)()()(软反馈型调速器(无加速度回路)的传递函数为设b p =0,T y =0,则即有PI 型调节规律。
pd p t y d y d x r b s T b b T s T T s T s x s Y s G +++++==])([1)()()(1211sT b b s x s Y s G d t t c r 11)()()(+≈=设有混有式水轮机,且e qx =0,按刚性水击考虑引水系统水流惯性作用,则水轮机及有压引水系统的传递函数为式中:发电机及负载的传递函数为sT e seT e s T e s T e e e e e s Y s M s G w qh w yw qh w qh y h qy y t t +-=+--==111)()()()(qhh yqy e e e e e -=na t g e s T s M s x s G +==1)()()(因此,在使用软反馈型调速器时,水轮机调节系统的开环传递函数为或式中:)1)(1)(1)(1()1)(1()()()(0++++++-==s e T s T e s b T s b T b e b s T s eT e s x s x s G naw qh t y p d t n p d w y c ))(1)()(()1)(1()(0anw qh y t d t p dw d T e s T e s T b s T b b s T s eT s K s G ++++++-=ya qh y d T T e e e K =在使用有加速度回路的软反馈型调速器时,调节系统开环传递函数为或式中:)1)(1)(1)(1)(1()1)(1)(1()()()('0+++++++-+==s e T s T e s b T s b T b s T e b s T s eT s T e s x s x s G na w qh t y p d t n n p d w n y c ))(1)()()(1()1)(1)(1()('0anw qh y t d t p n dw n n T e s T e s T b s T b b s T s T s eT s T s K s G +++++++-+=ya qh n y n d T T e T e e T K '=对给定信号x,调节系统的闭环传递函数为c,调节系统的闭环传递函数为对负荷扰动信号mg0分式前负号表示负荷力矩增加相应转速减少。