数字图像处理(第二版 阮秋琦 阮宇智)的课后习题答案
- 格式:docx
- 大小:62.74 KB
- 文档页数:2
数字图像处理第一章1、1解释术语(2) 数字图像:为了便于用计算机对图像进行处理,通过将二维连续(模拟)图像在空间上离散化,也即采样,并同时将二维连续图像的幅值等间隔的划分成多个等级(层次)也即均匀量化,以此来用二维数字阵列并表示其中各个像素的空间位置与每个像素的灰度级数的图像形式称为数字图像。
(3)图像处理:就是指对图像信息进行加工以满足人的视觉或应用需求的行为。
1、7 包括图像变化、图像增强、图像恢复、图像压缩编码、图像的特征提取、形态学图像处理方法等。
彩色图像、多光谱图像与高光谱图像的处理技术沿用了前述的基本图像处理技术,也发展除了一些特有的图像处理技术与方法。
1、8基本思路就是,或简单地突出图像中感兴趣的特征,或想方法显现图像中那些模糊了的细节,以使图像更清晰地被显示或更适合于人或及其的处理与分析。
1、9基本思路就是,从图像退化的数学或概率模型出发,研究改进图像的外观,从而使恢复以后的图像尽可能地反映原始图像的本来面目,从而获得与景物真实面貌相像的图像。
1、10基本思路就是,,在不损失图像质量或少损失图像质量的前提下,尽可能的减少图像的存储量,以满足图像存储与实时传输的应用需求。
1、11基本思路就是,通过数学方法与图像变换算法对图像的某种变换,以便简化图像进一步处理过程,或在进一步的图像处理中获得更好的处理效果。
1、12基本目的就是,找出便于区分与描述一幅图像中背景与目标的方法,以方便图像中感兴趣的目标的提取与描述。
第二章2、1解释下列术语(18)空间分辨率:定义为单位距离内可分辨的最少黑白线对的数目,用于表示图像中可分辨的最小细节,主要取决于采样间隔值的大小。
(19)灰度分辨率:就是指在灰度级别中可分辨的最小变化,通常把灰度级数L称为图像的灰度级分辨率。
(20)像素的4邻域:对于图像中位于(x,y)的像素p来说,与其水平相邻与垂直相邻的4个像素称为该像素的4邻域像素,她们的坐标分别为(x-1,y)(x,y-1)(x,y+1)(x+1,y)。
参考解答第2章2.2一阶矩或平均值; 二阶矩或自相关函数;自协方差;方差2.5压缩能力更强,码书控制着量化失真量的大小,计算量大,定长码,容易处理。
2.7二进制图像,索引图像,灰度图像,多帧图像,RGB 图像。
可以。
2.8采样间隔是决定图像空间分辨率的主要参数。
2.9如果1S 中的某些像素与2S 中的某些像素连接,则两个图像子集是相连接的。
在图2.9中,1S p ∈和2S q ∈在V 中取值,且q 在)(8p N 中,因此p 和q 是8连接的,1S 和2S 也是8连接的。
q 在)(p N D 中,且)()(44q N p N 是空集,即满足m 连接条件,因此p 和q 是m 连接的,p 和q 是8连接的,1S 和2S 也是8连接的。
也是m 连接的。
但是,1S 和2S 中所有像素之间都不存在4连接,因此1S 和2S 不是4连接的。
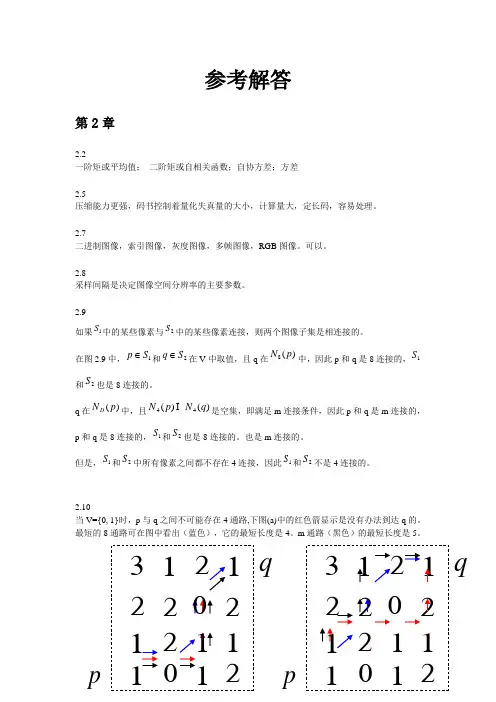
2.10当V={0, 1}时,p 与q 之间不可能存在4通路,下图(a)中的红色箭显示是没有办法到达q 的。
最短的8通路可在图中看出(蓝色),它的最短长度是4。
m 通路(黑色)的最短长度是5。
qpqp当V={1, 2}时,最短的4通路的一种可能显示在图(b)中(红色箭),它的长度是6。
最短的8通路的一种可能显示蓝色箭,它的长度是4。
m通路(黑色)的长度是6。
这些从p到q的同样长度的4、8、m通路不是唯一的。
2.11p和q之间的D4和D8距离与任何通路无关,仅与点的坐标有关。
对于像素p, q其坐标分别为(x, y),(s,t),D4(p, q) = | x - s | + | y – t | = 6D8(p, q) = max ( | x - s | , | y – t | ) = 3然而,如果选择考虑m邻接,则两点间的Dm距离用点间最短的通路定义。
在这种情况下,两像素间的距离将依赖于沿通路的像素值以及它们的邻点值。
Dm(p, q) = 6。
第3章3.1FFT(Fast Fourier Transformation),即为快速傅氏变换,是离散傅氏变换的快速算法,它是根据离散傅氏变换的奇、偶、虚、实等特性,对离散傅立叶变换的算法进行改进获得的。
第一章1.连续图像中,图像为一个二维平面,(x,y)图像中的任意一点,f(x,y)为图像于(x,y)于处的值。
连续图像中,(x,y)的取值是连续的,f(x,y)也是连续的数字图像中,图像为一个由有限行有限列组成的二维平面,(i,j)为平面中的任意一点,g(i,j)则为图像在(i,j)处的灰度值,数字图像中,(i,j) 的取值是不连续的,只能取整数,对应第i行j列,g(i,j) 也是不连续的,表示图像i行j列处图像灰度值。
联系:数字图像g(i,j)是对连续图像f(x,y)经过采样和量化这两个步骤得到的。
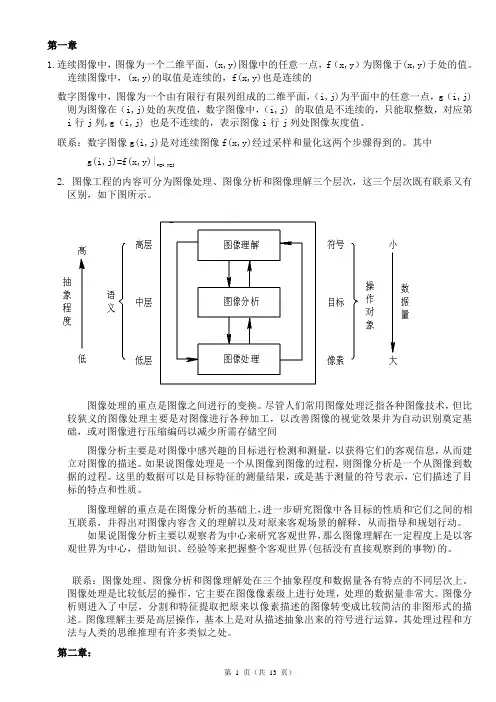
其中g(i,j)=f(x,y)|x=i,y=j2. 图像工程的内容可分为图像处理、图像分析和图像理解三个层次,这三个层次既有联系又有区别,如下图所示。
图像处理的重点是图像之间进行的变换。
尽管人们常用图像处理泛指各种图像技术,但比较狭义的图像处理主要是对图像进行各种加工,以改善图像的视觉效果并为自动识别奠定基础,或对图像进行压缩编码以减少所需存储空间图像分析主要是对图像中感兴趣的目标进行检测和测量,以获得它们的客观信息,从而建立对图像的描述。
如果说图像处理是一个从图像到图像的过程,则图像分析是一个从图像到数据的过程。
这里的数据可以是目标特征的测量结果,或是基于测量的符号表示,它们描述了目标的特点和性质。
图像理解的重点是在图像分析的基础上,进一步研究图像中各目标的性质和它们之间的相互联系,并得出对图像内容含义的理解以及对原来客观场景的解释,从而指导和规划行动。
如果说图像分析主要以观察者为中心来研究客观世界,那么图像理解在一定程度上是以客观世界为中心,借助知识、经验等来把握整个客观世界(包括没有直接观察到的事物)的。
联系:图像处理、图像分析和图像理解处在三个抽象程度和数据量各有特点的不同层次上。
图像处理是比较低层的操作,它主要在图像像素级上进行处理,处理的数据量非常大。
图像分析则进入了中层,分割和特征提取把原来以像素描述的图像转变成比较简洁的非图形式的描述。
数字图像处理每章课后题参考答案第一章和第二章作业:1.简述数字图像处理的研究内容。
2.什么是图像工程?根据抽象程度和研究方法等的不同,图像工程可分为哪几个层次?每个层次包含哪些研究内容?3.列举并简述常用表色系。
1.简述数字图像处理的研究内容?答:数字图像处理的主要研究内容,根据其主要的处理流程与处理目标大致可以分为图像信息的描述、图像信息的处理、图像信息的分析、图像信息的编码以及图像信息的显示等几个方面,将这几个方面展开,具体有以下的研究方向:1.图像数字化,2.图像增强,3.图像几何变换,4.图像恢复,5.图像重建,6.图像隐藏,7.图像变换,8.图像编码,9.图像识别与理解。
2.什么是图像工程?根据抽象程度和研究方法等的不同,图像工程可分为哪几个层次?每个层次包含哪些研究内容?答:图像工程是一门系统地研究各种图像理论、技术和应用的新的交叉科学。
根据抽象程度、研究方法、操作对象和数据量等的不同,图像工程可分为三个层次:图像处理、图像分析、图像理解。
图像处理着重强调在图像之间进行的变换。
比较狭义的图像处理主要满足对图像进行各种加工以改善图像的视觉效果。
图像处理主要在图像的像素级上进行处理,处理的数据量非常大。
图像分析则主要是对图像中感兴趣的目标进行检测和测量,以获得它们的客观信息从而建立对图像的描述。
图像分析处于中层,分割和特征提取把原来以像素描述的图像转变成比较简洁的非图形式描述。
图像理解的重点是进一步研究图像中各目标的性质和它们之间的相互联系,并得出对图像内容含义的理解以及对原来客观场景的解释,从而指导和规划行为。
图像理解主要描述高层的操作,基本上根据较抽象地描述进行解析、判断、决策,其处理过程与方法与人类的思维推理有许多相似之处。
第三章图像基本概念1.图像量化时,如果量化级比较小时会出现什么现象?为什么?答:当实际场景中存在如天空、白色墙面、人脸等灰度变化比较平缓的区域时,采用比较低的量化级数,则这类图像会在画面上产生伪轮廓(即原始场景中不存在的轮廓)。

数字图像处理课后答案1. 什么是数字图像处理?数字图像处理是指利用计算机对图像进行处理的一门学科。
它是图像处理领域的一个重要分支,主要目标是通过一系列数学算法和统计方法,对数字图像进行分析和处理,从而达到改善图像质量、提取图像特征、实现图像识别等目的。
2. 数字图像处理的主要内容数字图像处理包含了很多内容,主要可以分为以下几个方面:2.1 图像增强图像增强是指通过一系列的算法和处理技术,改善图像的质量,使得图像更加清晰、明亮、对比度更强、噪声更少等。
常见的图像增强技术包括直方图均衡化、滤波、锐化等。
2.2 图像压缩图像压缩是指通过一定的算法和技术,对图像进行编码和解码,从而减少图像的存储空间和传输带宽。
常见的图像压缩算法包括JPEG、PNG、GIF等。
2.3 图像分割图像分割是指将一张图像分成若干个区域,每个区域具有一定的相似性和一致性。
通过图像分割可以提取出图像中的物体或者感兴趣的区域,为图像分析和识别提供基础。
常见的图像分割方法有阈值分割、区域生长法等。
2.4 特征提取特征提取是指从图像中提取出有代表性的特征,用于图像分类、目标识别等应用。
常见的特征提取方法包括边缘检测、纹理特征提取、形状描述等。
2.5 图像恢复图像恢复是指通过一系列的算法和技术,对受损或者退化的图像进行修复,使得图像更加清晰、完整。
常见的图像恢复方法包括去噪、去模糊、去抖动等。
3. 数字图像处理的应用领域数字图像处理在很多领域中都有广泛的应用,以下是一些典型的应用领域:3.1 医学影像处理在医学领域,数字图像处理应用非常广泛。
它可以用于CT 扫描、MRI、X光片等医学图像的分析、特征提取和诊断。
3.2 无人驾驶数字图像处理在无人驾驶领域也有重要的应用。
通过摄像头采集到的图像,利用图像处理算法和技术,可以实现车辆的感知、障碍物检测、车道识别等功能。
3.3 图像识别图像识别是数字图像处理的一个重要应用领域。
通过图像处理和模式识别的技术,可以实现人脸识别、字符识别、目标识别等功能。

第二章(2.1、2.2略) 2.4图像逼真度就是描述被评价图像与标准图像的偏离程度。
图像的可懂度就是表示它能向人或机器提供信息的能力。
91)],([)],(),([112112=-=∑∑∑∑====∧J j Kk J j Kk k j f k j f k j f NMSE 2.5{,}log ()log log 60log 2012log 3B L L y y y B B B B ∆=+∆-=-={,}log 100log 50log 212L L B B B ∆=-=21∆>∆所以第一副图像中的目标人眼观察时会觉得更亮些。
第三章3.1解:(a )⎰⎰+-=yx dxdy vy ux j y x f v u F ,)](2exp[),(),(π⎰⎰--=abdy vy j dx ux j E)2exp()2exp(4ππba vj vy j u j ux j E 00]2)2exp([]2)2exp([4ππππ----=uvvb ua E 2)2sin()2sin(πππ=(b ) 由(a )的结果可得:(,)))2 2))F u v E au av Ea au av =⋅⋅=⋅⋅sinc sinc sinc sinc根据旋转不变性可得:2{(,45)}(,45)2[()][()]o o F f r F Ea a u v a u v θωϕππ+=+=⋅-⋅+sinc sinc (注:本题由不同方法得到的最终表达式可能有所不同,但通过变形可以互换)3.2证:作以下代换:⎩⎨⎧==θθs i nc o s r y r x ,a r ≤≤0,πθ20≤≤ 利用Jacobi 变换式,有: ⎰⎰+-=yx dxdy vy ux j y x f v u F ,)](2exp[),(),(πdr rd vr r u j r r f r θθθπθθθ)]sin cos (2exp[)sin ,cos (,+-=⎰⎰ ⎰⎰+-=θθθθπ,)]sin cos (2exp[r dr rd v u r j E ⎰⎰+-=θθϕθϕθρπ,)]sin sin cos (cos 2exp[r rdrd r j E ⎰⎰--=θθϕθπ,)]cos(2exp[r rdrd r j E ⎰∞=00)2(2dr r rJ Eπρπ3.3二维离散傅立叶变换对的矩阵表达式为F P f P =⋅⋅222(00)(01)(0(1))222(10)(11)(1(1))1222((1)0)((1)1)((1)(1))11122(1)11 2(11j j j N N N Ne ee j j j N N N N e e eP N j N j N j N N N N N e e e j j N N N e e Nj N N e ππππππππππππ⎡⎤-⋅-⋅-⋅-⎢⎥⎢⎥⎢⎥-⋅-⋅-⋅-⎢⎥=⎢⎥⎢⎥⎢⎥--⋅--⋅--⋅-⎢⎥⎢⎥⎣⎦---=--22)(1)j N N e π⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥--⎢⎥⎣⎦11122(1)11()222(1)(1)1j j N N N e e NP j N j N N N e e ππππ⎡⎤⎢⎥---⎢⎥⎢⎥-=⎢⎥⎢⎥⎢⎥----⎢⎥⎣⎦当4N =时1111111111111 111111111111i i i i P P i i i i ⎡⎤⎡⎤⎢⎥⎢⎥-----⎢⎥⎢⎥==⎢⎥⎢⎥----⎢⎥⎢⎥----⎢⎥⎢⎥⎣⎦⎣⎦11''11'1 () F P f P P P f P P f P FP P FP P P -----=⋅⋅⋅⋅===∴=3.4以3.3 题的DFT 矩阵表达式求下列数字图像的 DFT: 解:(1) 当N=4 时11112111111111021111111110021111116110002114222222200621 206016226200i i i i F i i i i i i i ii i i ⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥----⎢⎥⎢⎥⎢⎥=⋅⋅⎢⎥⎢⎥⎢⎥----⎢⎥⎢⎥⎢⎥----⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎡⎤-+---⎢⎥-+⎢⎥=⎢⎥⎢⎥+-⎢⎥⎣⎦(2)111100001111112222111111122221111161100001200010001 000021000i i i i F i i i i i i i ⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥----⎢⎥⎢⎥⎢⎥=⋅⋅⎢⎥⎢⎥⎢⎥----⎢⎥⎢⎥⎢⎥----⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎡⎤⎢⎥--⎢⎥=⎢⎥⎢⎥-+⎢⎥⎣⎦3.5解:8,3(4)(5)21110100112(4,5)(1)(1)8880(3)(6)21110011112(3,6)(1)(1)8880N n b b i i g i b b i i g i ==⨯+⨯+⨯-=-=-=-∏=⨯+⨯+⨯-=-=-=∏=3.6 解:2020(6)(5)(1)(7)11(6,5)(1)8811(1,7)(1)88i i i i i i b p b p H H ==∑=-=-∑=-=-3.11求下列离散图像信号的二维 DFT , DWT,DHT 解: (1)21011011010000000000001 000000000000200000000000i i F W H ---+--⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥===⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦(2)210122002020000000000000 00000000000000000000000i i F W H -+----⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥===⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦第四章4.1阐述哈夫曼编码和香农编码方法的理论依据,并扼要证明之。
(完整版)数字图像处理课后题答案1. 图像处理的主要⽅法分⼏⼤类?答:图字图像处理⽅法分为⼤两类:空间域处理(空域法)和变换域处理(频域法)。
空域法:直接对获取的数字图像进⾏处理。
频域法:对先对获取的数字图像进⾏正交变换,得到变换系数阵列,然后再进⾏处理,最后再逆变换到空间域,得到图像的处理结果2. 图像处理的主要内容是什么?答:图形数字化(图像获取):把连续图像⽤⼀组数字表⽰,便于⽤计算机分析处理。
图像变换:对图像进⾏正交变换,以便进⾏处理。
图像增强:对图像的某些特征进⾏强调或锐化⽽不增加图像的相关数据。
图像复原:去除图像中的噪声⼲扰和模糊,恢复图像的客观⾯⽬。
图像编码:在满⾜⼀定的图形质量要求下对图像进⾏编码,可以压缩表⽰图像的数据。
图像分析:对图像中感兴趣的⽬标进⾏检测和测量,从⽽获得所需的客观信息。
图像识别:找到图像的特征,以便进⼀步处理。
图像理解:在图像分析的基础上得出对图像内容含义的理解及解释,从⽽指导和规划⾏为。
3. 名词解释:灰度、像素、图像分辨率、图像深度、图像数据量。
答:像素:在卫星图像上,由卫星传感器记录下的最⼩的分⽴要素(有空间分量和谱分量两种)。
通常,表⽰图像的⼆维数组是连续的,将连续参数 x,y ,和 f 取离散值后,图像被分割成很多⼩的⽹格,每个⽹格即为像素图像分辨率:指对原始图像的采样分辨率,即图像⽔平或垂直⽅向单位长度上所包含的采样点数。
单位是“像素点/单位长度”图像深度是指存储每个像素所⽤的位数,也⽤于量度图像的⾊彩分辨率.图像深度确定彩⾊图像的每个像素可能有的颜⾊数,或者确定灰度图像的每个像素可能有的灰度级数.它决定了彩⾊图像中可出现的最多颜⾊数,或灰度图像中的最⼤灰度等级(图像深度:位图图像中,各像素点的亮度或⾊彩信息⽤⼆进制数位来表⽰,这⼀数据位的位数即为像素深度,也叫图像深度。
图像深度越深,能够表现的颜⾊数量越多,图像的⾊彩也越丰富。
)图像数据量:图像数据量是⼀幅图像的总像素点数⽬与每个像素点所需字节数的乘积。
... ............................................................. 北為................................................. .......................................数字图像处理第一章1.1解释术语(2)数字图像:为了便于用计算机对图像进行处理,通过将二维连续(模拟)图像在空间上离散化,也即采样,并同时将二维连续图像的幅值等间隔的划分成多个等级(层次)也即均匀量化,以此来用二维数字阵列并表示其中各个像素的空间位置和每个像素的灰度级数的图像形式称为数字图像。
(3)图像处理:是指对图像信息进行加工以满足人的视觉或应用需求的行为。
1.7包括图像变化、图像增强、图像恢复、图像压缩编码、图像的特征提取、形态学图像处理方法等。
彩色图像、多光谱图像和高光谱图像的处理技术沿用了前述的基本图像处理技术,也发展除了一些特有的图像处理技术和方法。
1.8基本思路是,或简单地突出图像中感兴趣的特征,或想方法显现图像中那些模糊了的细节,以使图像更清晰地被显示或更适合于人或及其的处理与分析。
1.9基本思路是,从图像退化的数学或概率模型出发,研究改进图像的外观,从而使恢复以后的图像尽可能地反映原始图像的本来面目,从而获得与景物真实面貌相像的图像。
1.10基本思路是,,在不损失图像质量或少损失图像质量的前提下,尽可能的减少图像的存储量,以满足图像存储和实时传输的应用需求。
1.11基本思路是,通过数学方法和图像变换算法对图像的某种变换,以便简化图像进一步处理过程,或在进一步的图像处理中获得更好的处理效果。
1.12基本目的是,找出便于区分和描述一幅图像中背景和目标的方法,以方便图像中感兴趣的目标的提取和描述。
第二章2.1解释下列术语(18)空间分辨率:定义为单位距离内可分辨的最少黑白线对的数目,用于表示图像中可分辨的最小细节,主要取决于采样间隔值的大小。
1.创建命令文件creatmatrix.m,实现以下功能:(1)建立一个A矩阵,大小为8×10,该矩阵为符合正态分布的随机矩阵;建立一个B矩阵,大小和A矩阵一样,是一个全1矩阵。
(2)将(1)中生成的A、B矩阵存储在junzhen.mat中。
A=randn(8,10) eye 生成单位矩阵ones全1阵zeros 全零阵B=ones(8,10)rand 均匀随机阵randn 正态随机阵2.创建命令文件imagep.m,实现以下功能:(1)读入cameraman.tif图像文件,查询其文件信息;(2)将该图像数据保存在矩阵I中;(3)显示原始图像,保存为cameraman1.jpg;(4)新建图形窗口,显示16个灰度等级下的图像,保存为cameraman2.bmp;(5)新建图形窗口,显示灰度范围在20到100之间的图像,保存为cameraman3.jpg;I=imread('cameraman.tif');imshow (I);figure,imshow(I,16);figure,imshow(I,[20, 100]);3创建命令文件process.m,实现以下功能:(1)读入football.jpg彩色图像文件,将该图像转换为灰度图像I;(2)设置阈值0.6,将灰度图像I转换为二值图像J1;(3)将图形窗口划分为一行三列,第一个子窗口显示I,第二个子窗口显示J1。
将该图形保存为process.jpgRGB=imread('football.jpg');I=rgb2gray(RGB);J1=im2bw(I,0.6);subplot(1,2,1); imshow(I);subplot(1,2,2); imshow(J1);4创建命令文件process1.m,实现以下功能:读入图像fabric.png彩色图像文件,转换为灰度图像A;将A图像的灰度缩小0.6倍,存入图像矩阵B中;将A图像的灰度放大1.2倍,存入图像矩阵C中;将图形窗口划分为三行一列,第一个子窗口显示A,第二个子窗口显示B,第三个子窗口显示C。
数字图像处理第一章1.1解释术语(2)数字图像:为了便于用计算机对图像进行处理,通过将二维连续(模拟)图像在空间上离散化,也即采样,并同时将二维连续图像的幅值等间隔的划分成多个等级(层次)也即均匀量化,以此来用二维数字阵列并表示其中各个像素的空间位置和每个像素的灰度级数的图像形式称为数字图像。
(3)图像处理:是指对图像信息进行加工以满足人的视觉或应用需求的行为。
1.7 包括图像变化、图像增强、图像恢复、图像压缩编码、图像的特征提取、形态学图像处理方法等。
彩色图像、多光谱图像和高光谱图像的处理技术沿用了前述的基本图像处理技术,也发展除了一些特有的图像处理技术和方法。
1.8基本思路是,或简单地突出图像中感兴趣的特征,或想方法显现图像中那些模糊了的细节,以使图像更清晰地被显示或更适合于人或及其的处理与分析。
1.9基本思路是,从图像退化的数学或概率模型出发,研究改进图像的外观,从而使恢复以后的图像尽可能地反映原始图像的本来面目,从而获得与景物真实面貌相像的图像。
1.10基本思路是,,在不损失图像质量或少损失图像质量的前提下,尽可能的减少图像的存储量,以满足图像存储和实时传输的应用需求。
1.11基本思路是,通过数学方法和图像变换算法对图像的某种变换,以便简化图像进一步处理过程,或在进一步的图像处理中获得更好的处理效果。
1.12基本目的是,找出便于区分和描述一幅图像中背景和目标的方法,以方便图像中感兴趣的目标的提取和描述。
第二章2.1解释下列术语(18)空间分辨率:定义为单位距离内可分辨的最少黑白线对的数目,用于表示图像中可分辨的最小细节,主要取决于采样间隔值的大小。
(19)灰度分辨率:是指在灰度级别中可分辨的最小变化,通常把灰度级数L称为图像的灰度级分辨率。
(20)像素的4邻域:对于图像中位于(x,y)的像素p来说,与其水平相邻和垂直相邻的4个像素称为该像素的4邻域像素,他们的坐标分别为(x-1,y)(x,y-1)(x,y+1)(x+1,y)。
《数字图像处理》习题参考答案第1 章概述连续图像和数字图像如何相互转换答:数字图像将图像看成是许多大小相同、形状一致的像素组成。
这样,数字图像可以用二维矩阵表示。
将自然界的图像通过光学系统成像并由电子器件或系统转化为模拟图像(连续图像)信号,再由模拟/数字转化器(ADC)得到原始的数字图像信号。
图像的数字化包括离散和量化两个主要步骤。
在空间将连续坐标过程称为离散化,而进一步将图像的幅度值(可能是灰度或色彩)整数化的过程称为量化。
采用数字图像处理有何优点答:数字图像处理与光学等模拟方式相比具有以下鲜明的特点:1.具有数字信号处理技术共有的特点。
(1)处理精度高。
(2)重现性能好。
(3)灵活性高。
2.数字图像处理后的图像是供人观察和评价的,也可能作为机器视觉的预处理结果。
3.数字图像处理技术适用面宽。
4.数字图像处理技术综合性强。
数字图像处理主要包括哪些研究内容答:图像处理的任务是将客观世界的景象进行获取并转化为数字图像、进行增强、变换、编码、恢复、重建、编码和压缩、分割等处理,它将一幅图像转化为另一幅具有新的意义的图像。
讨论数字图像处理系统的组成。
列举你熟悉的图像处理系统并分析它们的组成和功能。
答:如图,数字图像处理系统是应用计算机或专用数字设备对图像信息进行处理的信息系统。
图像处理系统包括图像处理硬件和图像处理软件。
图像处理硬件主要由图像输入设备、图像运算处理设备(微计算机)、图像存储器、图像输出设备等组成。
软件系统包括操作系统、控制软件及应用软件等。
图数字图像处理系统结构图1常见的数字图像处理开发工具有哪些各有什么特点答.目前图像处理系统开发的主流工具为 Visual C++(面向对象可视化集成工具)和 MATLAB 的图像处理工具箱(Image Processing Tool box)。
两种开发工具各有所长且有相互间的软件接口。
Microsoft 公司的 VC++是一种具有高度综合性能的面向对象可视化集成工具,用它开发出来的 Win 32 程序有着运行速度快、可移植能力强等优点。
四.编程题1.对于24位真彩色测试图像girl,编程分别统计其R、G、B分量的直方图,并显示直方图结果。
解:程序及结果如下:I=imread('girl.bmp');R=I(:,:,1);[REDcounts,x] = imhist(R);G=I(:,:,2);[Greencounts,y] = imhist(R);B=I(:,:,3);[Bluecounts,z] = imhist(R);figure;subplot(222);imshow(R);title('红');subplot(223);imshow(R);title('绿');subplot(224);imshow(R);title('蓝');figure;subplot(222);imhist(R);subplot(223);imhist(G);subplot(224);imhist(B);2. 采用Robert算子对灰度测试图像lena进行边缘检测,编程并显示结果。
解:程序及结果如下:I=imread('lena.bmp');figure,imshow(I);BW=edge(I,'robert',0.09);figure,imshow(BW)3.编程实现对灰度测试图像airplane进行水平镜像,垂直镜像和对角镜像变换,显示各种镜像结果。
解:程序及结果如下:I=imread('airplane.bmp');I=double(I);H=size(I);I_fliplr(1:H(1),1:H(2))=I(1:H(1),H(2):-1:1);imshow(uint8(I_fliplr));figure;I_flipud(1:H(1),1:H(2))=I(H(1):-1:1,1:H(2));imshow(uint8(I_flipud));figure;I_fliplr_flipud(1:H(1),1:H(2))=I(H(1):-1:1,H(2):-1:1);imshow(uint8(I_fliplr_flipud));4.编程实现对二值图像的腐蚀,膨胀,开,闭运算,以测试图像splash为例,给出处理结果。
1《数字图像处理》 习题参考答案第1章概述1.1连续图像和数字图像如何相互转换?答:数字图像将图像看成是许多大小相同、形状一致的像素组成。
这样,数字图像可以用二维矩阵表示。
将自然界的图像通过光学系统成像并由电子器件或系统转化为模拟图像 (连续图像)信号,再由模拟 /数字转化器(ADC )得到原始的数字图像信号。
图像的数字化包括离散和量化两个主要步骤。
在空间将连续坐标过程称为离散化,而进一步将图像的幅度值(可能是灰度或色彩)整数化的过程称为量化。
1.2采用数字图像处理有何优点?答:数字图像处理与光学等模拟方式相比具有以下鲜明的特点:1 •具有数字信号处理技术共有的特点。
(1)处理精度高。
(2)重现性能好。
(3)灵活性高。
2•数字图像处理后的图像是供人观察和评价的,也可能作为机器视觉的预处理结果。
3•数字图像处理技术适用面宽。
4 •数字图像处理技术综合性强。
1.3数字图像处理主要包括哪些研究内容?答:图像处理的任务是将客观世界的景象进行获取并转化为数字图像、进行增强、变换、编码、恢复、重建、编码和压缩、分割等处理,它将一幅图像转化为另一幅具有新的意义的 图像。
1.4讨论数字图像处理系统的组成。
列举你熟悉的图像处理系统并分析它们的组成和功能。
答:如图1.8,数字图像处理系统是应用计算机或专用数字设备对图像信息进行处理的 信息系统。
图像处理系统包括图像处理硬件和图像处理软件。
图像处理硬件主要由图像输入设备、图像运算处理设备(微计算机) 、图像存储器、图像输出设备等组成。
软件系统包括操作系统、控制软件及应用软件等。
1.5 常见的数字图像处理开发工具有哪些?各有什么特点?答.目前图像处理系统开发的主流工具为 Visual C++ (面向对象可视化集成工具)和 MATLAB 的图像t+W<住《l 塁希碎«IUIMEH 鼻爭■图1.8数字图像处理系统结构图处理工具箱(Image Processing Tool box )。
第一章1.连续图像中,图像为一个二维平面,(x,y)图像中的任意一点,f(x,y)为图像于(x,y)于处的值。
连续图像中,(x,y)的取值是连续的,f(x,y)也是连续的数字图像中,图像为一个由有限行有限列组成的二维平面,(i,j)为平面中的任意一点,g(i,j)则为图像在(i,j)处的灰度值,数字图像中,(i,j) 的取值是不连续的,只能取整数,对应第i行j列,g(i,j) 也是不连续的,表示图像i行j列处图像灰度值。
联系:数字图像g(i,j)是对连续图像f(x,y)经过采样和量化这两个步骤得到的。
其中g(i,j)=f(x,y)|x=i,y=j2. 图像工程的内容可分为图像处理、图像分析和图像理解三个层次,这三个层次既有联系又有区别,如下图所示。
图像处理的重点是图像之间进行的变换。
尽管人们常用图像处理泛指各种图像技术,但比较狭义的图像处理主要是对图像进行各种加工,以改善图像的视觉效果并为自动识别奠定基础,或对图像进行压缩编码以减少所需存储空间图像分析主要是对图像中感兴趣的目标进行检测和测量,以获得它们的客观信息,从而建立对图像的描述。
如果说图像处理是一个从图像到图像的过程,则图像分析是一个从图像到数据的过程。
这里的数据可以是目标特征的测量结果,或是基于测量的符号表示,它们描述了目标的特点和性质。
图像理解的重点是在图像分析的基础上,进一步研究图像中各目标的性质和它们之间的相互联系,并得出对图像内容含义的理解以及对原来客观场景的解释,从而指导和规划行动。
如果说图像分析主要以观察者为中心来研究客观世界,那么图像理解在一定程度上是以客观世界为中心,借助知识、经验等来把握整个客观世界(包括没有直接观察到的事物)的。
联系:图像处理、图像分析和图像理解处在三个抽象程度和数据量各有特点的不同层次上。
图像处理是比较低层的操作,它主要在图像像素级上进行处理,处理的数据量非常大。
图像分析则进入了中层,分割和特征提取把原来以像素描述的图像转变成比较简洁的非图形式的描述。
5.20测量背景的平均值。
把图像的所有像素除了十字准线设为平均灰度值。
表
示出此图像的傅氏变换G(u,v)。
因为十字准线的特点并给出了高度的准确性,我们能构建此模板的图像(相同的尺寸),使用此模板确定原图的灰度级。
然后,我们在正确的位置构建十字准线的模型(取决于给定的图像),利用所提供之尺寸和十字准线的灰度级。
表示新图像的傅里叶变换F(u,v)。
G (u,v)与F(u,v)的比值是一个模糊函数H(u,v)的估计。
对于F(u,v)可能消失的值中,我们可以建立一个带阻滤波器,使用图5.27的方法。
因为我们知道F(u,v),G(u,v)和H(u,v) 的估计, 我们也可以精确模糊函数的估计,用等式5.8.3的G和H代替,并调整K值以便获得F(u,v)更近似的结果(这个结果可以通过傅里叶反变换估计出来)。
在这两种情况下滤波器可以用来模糊图像,如果需要的话。
5.21解决这一问题的关键是下面的函数
其中,是此函数的拉普拉斯(对r的二次导数)
那是, 等于给定的函数。
然后我们知道从式4.4得到函数f(x,y)
因此,我们简化了求高斯函数中的傅里叶变换。
从表格4.1中,我们从高斯
对可以得到函数的傅里叶变换,其变换形式是
因此,退化函数的傅里叶变换是
5.22这是一个简单的扩展问题。
它的目的是为了熟悉维纳滤波器的各种条件。
从式5.8.3得
其中
然后
5.23从式5.9.4得
其中,P(u,v)是拉普拉斯算子的傅氏变换。
这是至于这个问题,我们可以合理地解答。
拉普拉斯算子的变换的表达式通过问题4.19中得到的。
然而, 对P(u,v)的代替,这只会增加滤波器的要求,并且不会简化表达式。
5.24因为这个系统是假定的线性和位置不变,因此可以用式子5.5.17。
举行。
此外,我们可以用叠加问题,得到了系统响应的F(u,v)和N(u,v)。
两个响应的和是完整的响应。
首先,仅用F(u,v)
然后,仅仅用N(u,v)
所以。