气动人工肌肉
- 格式:docx
- 大小:607.38 KB
- 文档页数:27

气动人工肌肉高速高精度研究气动人工肌肉(Pneumatic Artificial Muscles,简称PAMs)是一种新型的驱动元件,具有高速高精度的特点,正在被广泛研究和应用。
本文将从气动人工肌肉的原理、结构和应用三个方面进行阐述。
一、气动人工肌肉的原理气动人工肌肉是一种基于气体压力控制的驱动元件,其原理类似于人体肌肉的运动。
它由柔性的材料制成,内部充填压缩空气或气体混合物。
当空气进入气动人工肌肉时,由于内部空间的收缩,肌肉会产生收缩力,从而实现运动。
通过控制气体的流入和排出,可以控制气动人工肌肉的运动速度和力量大小。
二、气动人工肌肉的结构气动人工肌肉主要由外包层、内腔、连接件和控制系统组成。
外包层是由柔性材料制成的,可以承受内部压力并保持结构的稳定性。
内腔是气动人工肌肉的主体部分,通过充填气体来实现收缩和伸展。
连接件用于连接气动人工肌肉和其他机械部件,传递力量和运动。
控制系统包括传感器、执行器和控制算法,用于监测和控制气动人工肌肉的运动状态。
三、气动人工肌肉的应用1. 机器人领域:气动人工肌肉可以用作机器人的驱动元件,实现灵活的运动和精准的控制。
机器人可以通过气动人工肌肉模拟人体肌肉的运动,具有更高的运动速度和精度,可以应用于工业生产、医疗护理、危险环境等领域。
2. 辅助康复领域:气动人工肌肉可以用于辅助康复设备,帮助患者恢复运动功能。
通过控制气动人工肌肉的收缩和伸展,可以模拟人体肌肉的运动,实现康复训练的目的。
气动人工肌肉具有轻巧、柔软和可调节性的特点,适合应用于康复机器人、义肢和外骨骼等设备中。
3. 智能结构领域:气动人工肌肉可以用于构建智能结构,实现形变和运动控制。
通过在结构中加入气动人工肌肉,可以实现结构的自适应、柔性和变形特性。
这种智能结构可以应用于航空航天、建筑工程和汽车制造等领域,提高产品的性能和安全性。
气动人工肌肉具有高速高精度的特点,正在成为研究和应用的热点。
通过深入研究气动人工肌肉的原理和结构,可以进一步推动其在机器人、康复和智能结构领域的应用,为人类带来更多的便利和福祉。

人工肌肉的分类
人工肌肉是一种仿生材料,可以模拟人类肌肉的功能和特性。
根据其材料和工作原理的不同,人工肌肉可以分为几个不同的分类。
第一类是电致动人工肌肉,它是利用电能来激活和控制的。
这种人工肌肉通常由柔性导电材料制成,如碳纳米管或导电聚合物。
当电流通过它们时,导电材料会收缩或膨胀,从而模拟真实肌肉的运动。
电致动人工肌肉具有响应速度快、力量大、可控性强的特点,因此在机器人和智能装置等领域有广泛的应用。
第二类是化学反应人工肌肉,它是通过化学反应来实现肌肉运动。
这种人工肌肉通常由柔性聚合物或液体晶体材料制成。
当外部刺激物如光、温度或化学物质作用于它们时,材料会发生化学反应,从而引起收缩或膨胀。
化学反应人工肌肉具有灵敏度高、反应速度快的特点,可广泛应用于微机器人和医疗领域。
第三类是气动人工肌肉,它是利用气体或液体的压力来驱动的。
这种人工肌肉通常由柔性气囊或膜片制成,当气体或液体通过它们时,会引起肌肉的收缩或膨胀。
气动人工肌肉具有响应速度快、力量大的特点,常用于机器人和航空航天等领域。
第四类是形状记忆人工肌肉,它是利用特殊的合金或聚合物材料来实现肌肉运动。
这种人工肌肉具有记忆形状的特性,当受到外界刺激时,材料可以自动回复到其原始形状。
形状记忆人工肌肉具有自
修复能力和长期稳定性,广泛应用于医疗领域。
以上是几种常见的人工肌肉分类,每一类都有其独特的特点和应用领域。
人工肌肉的发展将为机器人技术、生物医学工程和智能装置等领域带来更大的创新和进步。
未来,随着科学技术的不断发展,人工肌肉的应用前景将变得更加广阔。

880 引言随着我国载人航天工程的不断开展,我国航天员在轨时间也越来越长,从最初的1天到神舟十四号的六个月,航天员在太空环境中生活的时间也越来越长。
目前已有大量研究表明,长期暴露在微重力环境下会对航天员的骨骼肌肉系统造成不同程度的影响,主要影响包括肌肉萎缩、骨质疏松、骨密度下降等。
数据显示,短中期(4-6个月)微重力环境已然导致宇航员脊柱显著的结构及功能变化,腰部肌肉萎缩19%-34.1%[4]、脊柱和近部股骨骨密度减少6%-10%[5]、坐姿高度平均增高6%,超过50%的宇航员在微重力环境中产生腰痛,且86%发生在腰部[7],严重影响其健康及任务执行能力。
且返回地球后宇航员椎间盘突出症的发生率是地球上对照组的4.3倍[8]。
目前对抗骨肌丢失的主要措施就是锻炼。
研究以气动人工肌肉为核心,设计了一套多加载模式的微重力环境中航天员背部骨肌对抗训练设备,并开展了仿真与实验研究,验证了该设计的可行性。
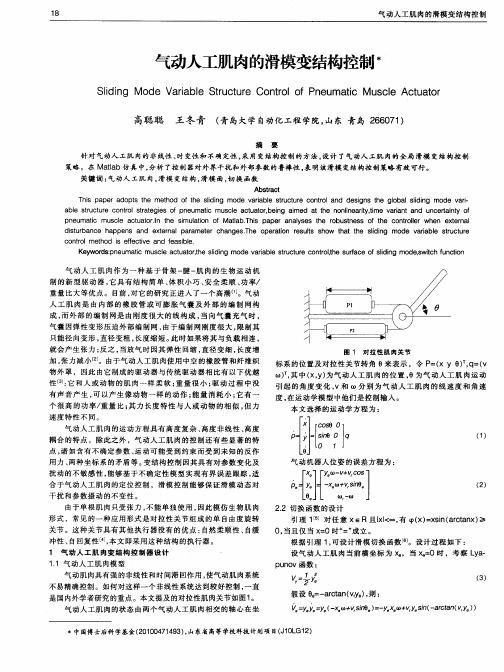
1 气动人工肌肉1.1 气动人工肌肉结构及原理气动人工肌肉,也称气动肌腱拉伸致动器,可以模仿肌肉的自然运动。
它由可膨胀的柔性管道和相应的接头组成。
柔性管由橡胶膜片和内表面由聚芳酰胺丝制成的非弯曲纤维组成。
膜片是一个空气密封件,用于密封工作介质。
纤维线用于加强和传递能量。
当内部压力增加时,膜片沿圆周膨胀。
这会产生拉力和纵向运动。
可用的拉伸力在收缩开始时达到最大值,然后缩短行程。
气动人工肌肉在设备中充当着能量转化的角色,通过将气体压力转化为拉力来驱动设备工90想状态下的气动人工肌肉进行了建模[12]。
但Chou 模型中人工肌肉编织角这一数值在实际中很难测量,于是Tondu等人进一步提出Tondu模型,此模型中人工肌肉的拉力由气压和收缩率决定,实际条件下更容易测量[13]。
因此,实际应用中多采用Tondu模型。
气动人工肌肉的Tondu模型为由式(1)也可得出,当人工肌肉长度固定也即收缩率固定时,其产生的拉力与其内部气压成正比。

气动肌肉工作原理嘿,朋友们!今天咱来聊聊气动肌肉这神奇的玩意儿到底是咋工作的。
你看啊,气动肌肉就像是我们身体里的肌肉一样,只不过它是靠气来发力的。
想象一下,就好像给它吹了一口气,它就能变得鼓鼓的,然后产生力量啦!它的原理其实并不复杂。
简单来说,就是通过往里面充气或者放气来实现收缩和伸展。
这不就跟我们吹气球有点像嘛,气充进去,气球就鼓起来了;把气放掉,气球就瘪下去了。
气动肌肉也是这样,充气的时候,它就会缩短,产生拉力;放气的时候呢,它就会变长,恢复原状。
那它在实际中有啥用呢?这用处可大啦!比如说在一些机器人身上,装上气动肌肉,就能让机器人的动作更加灵活自然,就好像真的有了生命一样。
再比如在一些需要力量控制的设备中,气动肌肉能根据不同的情况调整力量的大小,多厉害呀!你说这气动肌肉是不是很神奇?它虽然没有我们真正的肌肉那么复杂,但也能发挥出很大的作用呢!而且啊,它还很耐用,不像我们的肌肉,累了还得休息。
气动肌肉的应用范围那是相当广泛啊!在工业领域,它可以帮忙搬运重物,减轻工人的负担;在医疗领域,说不定以后能帮助那些行动不便的人重新站起来呢!这可不是我瞎说,科技发展这么快,啥都有可能发生。
你想想,如果以后满大街都是装有气动肌肉的机器人,那该是啥样的景象?它们可以帮我们送快递、打扫卫生、照顾老人小孩,那我们不就轻松多啦?不过呢,气动肌肉也不是完美无缺的。
它也有自己的局限性,比如对气压的控制要求比较高,如果气压不稳定,可能就没法正常工作啦。
但这也难不倒我们聪明的科学家们,他们肯定会想出办法来解决这些问题的。
总之,气动肌肉是个很有意思的东西,它的工作原理虽然简单,但应用潜力却是巨大的。
我相信,随着科技的不断进步,气动肌肉会在更多的领域发挥出更大的作用,给我们的生活带来更多的便利和惊喜!让我们一起期待吧!原创不易,请尊重原创,谢谢!。
McKibben气动人工肌肉的测量和建模Ching-Ping Chou and Blake HannafordMember, ZEEE摘要:本文报道了测量和建模McKibben人工肌肉气动执行机构。
此装置,首先在1950年开发的,包含扩大管周围编织线。
我们通过静态和动态长度张力的测试结果,得出一个线性模型。
并将结果与人体的肌肉属性相比较,以评估是否适合人体肌肉仿真。
McKibben执行器基于生物学的机器人手臂。
一、引言McKibben气动人工肌肉的研究在1950年和1960年,主要是发达的假肢。
他们最近被商业化的日本机器人应用普利司通橡胶公司的J.温特斯博士用来重新设计建造生物力学逼真的骨骼模型。
McKibben肌肉包括一个内部膀胱周围由编织网是连接外壳(具有灵活且不可扩展的线程)在两端的接头或一些类似肌腱的结构(图1(a)条)。
当膀胱加压,高的高压气体推压其内表面上,并针对外部的外壳,且很容易增加其体积。
由于纵向刚度非常高的编织网壳中的线程,执行器缩短根据它的容量的增加和/或,如果它产生张力被耦合到一个机械负载。
这种物理配置导致McKibben本的肌肉有可变刚度春天的特性,非线性弹性被动,身体的柔韧性,和很轻的重量比其他种类的人工致动器[9]。
之间的关系紧张,长度,速度不同的激活是主要特征从类型区分。
人骨骼肌也有其自己的特殊特性:例如,凸状主动张力长度关系[5],非线性被动拉伸长度的关系,和双曲张力速度关系[11]。
每个属性也是一个函数激活电平[14],[18],[19]。
为了说明的相似性(或不)生物肌肉,三种类型的McKibben肌肉,两个普利司通设计者和博士共同进行了测试。
另外,由于气动执行器,实验和建模简单的气动回路都包括在内。
在本文中,所有的实验,理论,建模,和模拟分为四个主要部分:准静态和动态拉伸长度的关系;第三节,气动回路;第四节,等距等渗实验和第五节,能源转换和效率估计。
第二节:1)一个理想化的静态McKibben的肌肉的物理模型进行分析一个简单的理论方法,2)动态试验机将描述;3)的一系列准静态和动态实验进行说明,显示的速度不敏感紧张长度滞后;4)简化的静态模型将描述基于实验数据和一个理论方法和5)的准静态和动态特性进行分析。
气动人工肌肉建模研究的开题报告题目:气动人工肌肉建模研究一、研究背景及意义随着智能机器人、人机协作技术的不断发展,气动人工肌肉(Pneumatic Artificial Muscle, PAM)的应用越来越广泛。
PAM具有结构简单、柔性、快速响应等优点,已被广泛应用于机器人、仿生等领域。
然而,当前PAM的建模研究仍存在不足,导致PAM在实际应用中的精度和控制效果受限。
因此,本研究旨在探索PAM建模的关键问题,提高PAM的精度和控制效果,为PAM的应用提供有力支持。
二、研究内容和方法1. PAM的结构及特性分析,包括PAM的材料、组成、结构形式等,以及其物理特性如柔性、质量、形变等。
2. PAM的建模方法研究,探索PAM的数学模型,分析PAM的运动学、动力学以及力学特性,并对PAM的现有建模方法进行评估与优化。
3. PAM的控制策略研究,分析PAM的控制问题,根据PAM的特性和建模结果,提出一种合适的控制策略,并进行实验验证。
4. PAM的应用研究,以机器人为应用场景,利用建立好的PAM模型和控制策略,控制机器人的动作并进行系统评价。
三、研究预期结果1. 建立PAM的数学模型,为PAM的应用提供理论基础。
2. 提出一种有效的PAM控制策略,提高PAM的控制精度和响应速度。
3. 通过机器人应用实验,检验所提出的PAM模型和控制策略的有效性。
四、研究方案及进度1. 第一年:对PAM的结构及特性进行分析研究,建立PAM的数学模型。
2. 第二年:对PAM的建模方法进行研究探索,选择合适的控制策略,并进行初步实验验证。
3. 第三年:对所建立的PAM模型和控制策略进行改进,通过机器人应用实验,验证所提出的模型和控制策略的有效性。
五、研究经费预算本研究预计需要200万元左右的经费,主要用于人员费用、实验设备、材料及成果的转化与应用等。
其中,人员费用占50%以上,实验设备约占20%。
McKibben气动人工肌肉的测量和建模Ching-Ping Chou and Blake HannafordMember, ZEEE摘要:本文报道了测量和建模McKibben人工肌肉气动执行机构。
此装置,首先在1950年开发的,包含扩大管周围编织线。
我们通过静态和动态长度张力的测试结果,得出一个线性模型。
并将结果与人体的肌肉属性相比较,以评估是否适合人体肌肉仿真。
McKibben执行器基于生物学的机器人手臂。
一、引言McKibben气动人工肌肉的研究在1950年和1960年,主要是发达的假肢。
他们最近被商业化的日本机器人应用普利司通橡胶公司的J.温特斯博士用来重新设计建造生物力学逼真的骨骼模型。
McKibben肌肉包括一个内部膀胱周围由编织网是连接外壳(具有灵活且不可扩展的线程)在两端的接头或一些类似肌腱的结构(图1(a)条)。
当膀胱加压,高的高压气体推压其内表面上,并针对外部的外壳,且很容易增加其体积。
由于纵向刚度非常高的编织网壳中的线程,执行器缩短根据它的容量的增加和/或,如果它产生张力被耦合到一个机械负载。
这种物理配置导致McKibben本的肌肉有可变刚度春天的特性,非线性弹性被动,身体的柔韧性,和很轻的重量比其他种类的人工致动器[9]。
之间的关系紧张,长度,速度不同的激活是主要特征从类型区分。
人骨骼肌也有其自己的特殊特性:例如,凸状主动张力长度关系[5],非线性被动拉伸长度的关系,和双曲张力速度关系[11]。
每个属性也是一个函数激活电平[14],[18],[19]。
为了说明的相似性(或不)生物肌肉,三种类型的McKibben肌肉,两个普利司通设计者和博士共同进行了测试。
另外,由于气动执行器,实验和建模简单的气动回路都包括在内。
在本文中,所有的实验,理论,建模,和模拟分为四个主要部分:准静态和动态拉伸长度的关系;第三节,气动回路;第四节,等距等渗实验和第五节,能源转换和效率估计。
第二节:1)一个理想化的静态McKibben的肌肉的物理模型进行分析一个简单的理论方法,2)动态试验机将描述;3)的一系列准静态和动态实验进行说明,显示的速度不敏感紧张长度滞后;4)简化的静态模型将描述基于实验数据和一个理论方法和5)的准静态和动态特性进行分析。
在第三条:1)两个动态实验进行说明简单的气动回路和;2)与线性或非线性的气体集中参数模型;阻力将描述模拟。
在第四节中,等距和等渗实验的气动行为将被显示。
在第五节,能源转换和根据气体动力学和热力学效率将是估计。
最后,致动器和气动系统进行比较生物肌肉。
在一般情况下,McKibben人工肌肉更类似于生物肌肉比起其他种人工执行器。
然而,气动系统,提供控制和执行器的电源,还需要一个很大的改进,以成一个可行的实施独立的系统。
二、张力和长度的动静态关系McKibben肌肉转换气动的致动器(或液压)的能量转化为机械形式转移膀胱的内表面上所施加的压力缩短张力。
找关系的紧张,长度和压力,理论方法和几个实验中,将被分析的简化模型。
A.静态物理模型McKibben肌肉为了找到作为压力的函数的张力和致动器的长度而不考虑详细的几何结构,理论方法的基础上节能首先介绍。
McKibben肌肉做输入工作(胜)当气体推内胆表面。
这是其中,P是绝对的内部的气体压力,PO,环境压力(1大气压=1.0336巴),PI,相对的压力,的Si,总的内表面,DSJ面积矢量,DLJ内表面位移和dV体积的变化。
输出工作(Wout)了当执行器缩短关联的体积变化,这是其中F是轴向张力,和dL,轴向位移。
从节能的观点,输入工作等于输出的工作,如果一个系统是无损和无能量存储。
假设执行器是在理想条件。
然后我们可以使用“虚功”的说法因此,由式(1)和(2)中,为了估计每升的体积变化,首先我们假设的可扩展性壳线程是非常低的(因为它必须被选择),因此致动器量将只取决于它的长度。
此外,中间部的致动器被模拟为一个完美的气缸零壁的厚度(图1(b)条),其中L是长度的缸,0是编织线和气缸之间的角度长轴,D是气缸的直径,正圈数一个线程,B螺纹长度。
L和D可以表示8恒定参数n和b的功能,圆柱体的体积是因此,由式(4b)中,F可以表示为P'和8的功能这相当于在这里,角度长轴为0时的直径等于90,舒尔特文献[17]中使用的是相同的形式。
张力因此线性比例的气压,为单调编织角(0<8<90')的功能。
最大当F = 0时,也就是,缩短达到,8=54.7'。
请注意,尽管我们取得的张力与这里假设理想缸,张力总是可以,来自所知道的任意形状的致动器的dV/ dL的(4B)而假设致动器将被视为非理想的。
B.动态试验机对于下面的实验中,测试系统,能够的制造和记录所需型态的张力,建长度,和压力的致动器(图2)。
该系统包括一台IBM兼容的个人计算机(PC,16MHz 的386SX,实时更新率高达5 kHz),PC扩展总线接口和定时器电路,A / D,D / A转换器,模拟滤波器和放大器,压力传感器(6.8 bar最大),应变式力传感器(最大100 N),滤波器,放大器,1/4马力直流电动机与PO WER放大器(RT24 A最大。
电流),光的角位置的增量式编码器(每转1600步)和一个解码器,一个压力调节器(10巴最大),电磁阀(费斯托比例压力稳压器MPP-3-1/8,最大10 bar),两个气体蓄能器(3 IN3和10立方英寸的),以及灵活的管(Q51/ 8“)。
通过利用不同的组合的U0通道和软件的设置,该系统可以进行各种测试条件,如恒定的压力测试,等距的测试,等渗测试,气动回路测试等。
C.准静态和动态实验由于没有解析解来描述生物肌张力长度激活的关系,各种被选为测试配置说明的一部分这种关系,如静态张力下的长度关系恒定的激活水平[5],等距至等渗快速释放实验[3],等速试验[3],[13]等轴测响应激活张力[11,[2]等请注意激活肌肉力学总是输入,其他两个量中的任一个(紧张和长度)可能是输入或输出。
致动器的压力是类似的激活电平,最初将被认为作为输入到致动器,这将在保持为常数尽可能在这些实验中,以尽量减少压力动态的影响,从而简化了分析在准静态实验测试三种类型的执行一个在动态实验还测试了。
该第一个休息长,1.1厘米,14厘米,用尼龙外壳直径在5巴的无负载。
第二个,与玻璃纤维壳,是20厘米,长0.9厘米,直径。
而第三个普利司通制造的,为14.7厘米长,1.5厘米的直径。
第一,在准静态实验,尼龙外壳执行器进行了试验。
一组低频三角波位移(相对静息长度,罗= 14厘米),最好覆盖的线性张力的区域相对应的不同的压力被选择作为输入的水平。
位移大的工作范围(产生峰值的1赫兹速度约0.5 LOLS)。
通过手动调节压力,获得六所需的恒定水平(0-5栏相)。
由于:1)长度变化的致动器的体积变化,2)在连接管路中的气体的粘度,以及3)调节器的输出滞后,当测得的压力将增加驱动器延长和缩短时,会降低。
为了减少的压力变化,10立方英寸(164立方厘米)蓄能器连接到调节器,和一个3立方英寸F49立方厘米)蓄能器是直接连接到致动器。
作为一个因此,压力变化被限制在低于0.1巴由于大的蓄电池的总容量,和由于接近压力滞后几乎是不可估量的位置(致动器),第二累加器。
图中所示为测得的压力和张力位移的响应(图3(a))。
通过减少压力变化的影响,磁滞回线的张力示出的关系。
的宽度和高度循环是约0.2-0.5厘米和5-10Ń的,分别。
二进行了进一步的实验,以示出多个特征滞后。
首先,位移波形的频率是降低到0.25赫兹,而在工作范围内保持相同(这将产生约0.125 L&峰值速度)。
该结果几乎是相同的以前的情况下,这表明紧张长度的行为是独立在低的速度的速度。
二,频率设置为1赫兹,而操作范围缩小一半左右(图3(b)中,实线)。
张力上升路径保持不变(上升“初始条件”是相同的),但下降的路径是不同的(下降“初始条件”是不同的,由于规模较小经营范围)。
因此,循环的宽度和高度的减少。
这表明滞后是历史依赖。
程序,以获取图。
图3(a)重复另两个致动器,并将结果在相同的格式的如图所示。
图3(c)及(d)。
的刚度,摩擦,和可扩展性在上面的三个致动器有很大的不同。
在动态实验,一组中高频正弦位移波形(相对于零张力长度)小的工作范围与施加到第一致动器。
压力设定为相对5巴,并保持恒定在这种情况下相当不错(由于长度变化较小)。
的频率和位移范围内的设计获得0.2-8.0 LOLS峰值速度,但仍保持在直线张力长度区域。
粘滞摩擦阻尼力,如果衡量,会发现这是一个滞后宽度的单调递增函数的速度。
然而,本结果表明,该宽度的张力位移循环几乎是不变的,除了在较高略有下降频率(图4)。
这些结果表明,与速度无关的滞后最有可能的是,其中占主导地位的库仑摩擦的致动器的总摩擦。
粘性摩擦是多少小于库仑摩擦力,从而不可估量。
D.简化的静态模型撇除上述库仑摩擦力,假设静态张力长度关系可以包括一个校正计算的壁的厚度,如果需要的话。
从(8B),张力线性正比于压力,为单调通过应用的编织角(0<0<90)的功能。
几何参数(测量从尼龙外壳致动器,B= 16.4厘米,N=3.15,和产量= 1.66厘米)(8B)仿真结果示于图中。
图5(a)但是,如果外壳的厚度和膀胱考虑的关系变得通过插入(4B)的这是更准确的,但更复杂的比(图8b)(图5(a)- (四),虚线=0.0762厘米补充)。
为了简化模型,张力目前被认为是的压力和长度的函数,和致动器是就像一个可变刚度弹性元件,或“气弹簧。
”其刚度(K DF/ml)的压力成比例,并且每单位压力(kg/ DP)的刚度接近一个恒定在10至14厘米长的仿真(图5(E),公斤=0.461厘米,或4.61 NKM。
BAR)。
其结果是,它可以是线性(1)中,L在理论上是可能的最小长度(当F = 0时)。
现在,考虑储存的能量通过致动器在其膀胱和外壳,产量如果P'> P如果P'<12BPth阈值的压力,以克服膀胱的径向弹性扩大,Kp为线性化的等效并联被动弹性常数膀胱材料与外壳线程剪切力,NL(- )是非线性项由于非理想缸,而致动器在其极端的长度(图6(a)条)。
的前两个产品条款也可以被表示为(12a)的其中,Pa= P T H - KP /kg,FA = KP(LM,- LO)。
实验估计这些参数,10个点假设静态张力长度压力对采样来自上述准静态的结果,并插入(13)(图6(b))。
这一计算结果KG= 0.466,P= 0.062吧,LMIN= 9.91厘米,和FA =-16.0 N.此外,PTH和KP可以估算知道LO= 14.0厘米,这将产生PTH =0.903酒吧和Kp=3.92 NKM。