河北农业大学机电学院
- 格式:docx
- 大小:1.91 MB
- 文档页数:52
科学技术创新2021.03基于A ndroi d +.N E T 架构的开放性实验室预约管理系统设计韩丽娟1谢云芳1李志男2王宾宾3(1、河北农业大学机电工程学院,河北保定0710012、石家庄轨道运输职业技术学院,河北石家庄0500003、中钞特种防伪科技有限公司,河北保定071071)随着国家经济发展进入新常态,积极推动大众创业、万众创新对于高校创新型人才培养机制提出了更高的要求。
高校理工类专业实验室作为开展实践教学和培养学生双创意识的重要平台,如何进一步创新管理机制同时提升信息化建设水平,已成为国内外专家学者研究的重要命题。
近年来,国内许多高校建立了理工类专业的开放性实验室,对学生双创意识的培养和创新实践起到了积极作用,但学生实验预约审批繁琐、实验资源利用率低、实验室管理信息化管理水平低等问题仍是一些高校面临的棘手问题。
因此探索和建立与时俱进的开放性实验室预约管理系统,对于降低实验室管理成本、提高实验资源利用率、满足学生不断增长的实践创新需求是十分必要的。
在移动互联网技术快速发展的时代背景下,本文在优化开放性实验室预约管理流程的基础上,对基于A ndr oi d 平台和.N ET 架构的开放性实验室预约管理系统进行设计,提高开放性实验室预约管理效率及信息化水平。
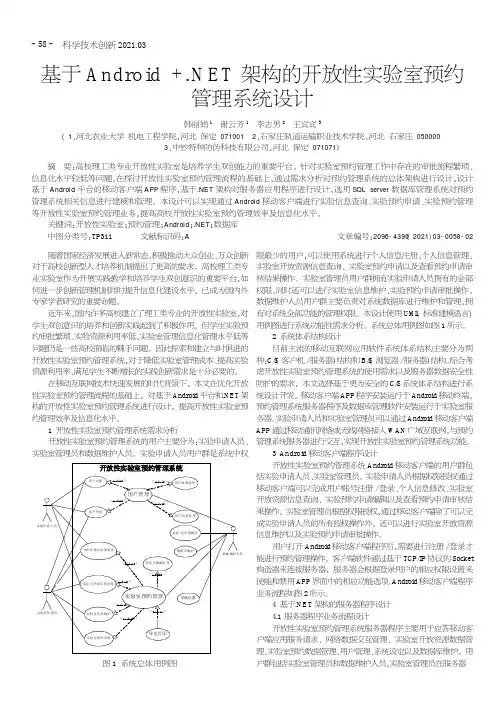
1开放性实验室预约管理系统需求分析开放性实验室预约管理系统的用户主要分为:实验申请人员、实验室管理员和数据维护人员。
实验申请人员用户群是系统中权限最少的用户,可以使用系统进行个人信息注册、个人信息管理、实验室开放资源信息查询、实验室预约申请以及查看预约申请审核结果操作。
实验室管理员用户群拥有实验申请人员拥有的全部权限,同时还可以进行实验室信息维护、实验预约申请审批操作。
数据维护人员用户群主要负责对系统数据库进行维护和管理,拥有对系统全部功能的管理权限。
本设计使用U M L (标准建模语言)用例图进行系统功能性需求分析。
系统总体用例图如图1所示。

第46卷第3期2023年5月河北农业大学学报JOURNAL OF HEBEI AGRICULTURAL UNIVERSITYVol.46 No.3May.2023基于红外热成像技术的笼内死鸡自动识别方法贾雁琳,薛 皓,周子轩,赵学谦,霍晓静,李丽华(河北农业大学 机电工程学院,河北 保定 071001)摘要:目前集约化养鸡场主要采用层叠式立体笼养模式,进行死鸡巡检过程,工人需多次攀爬扶梯,劳动强度大且工作简单机械重复。
为了提高劳动效率,增加人工智能对劳动型人才进行补充,本文将图像识别分析与红外热成像技术相结合,采用了利用温度阈值剥离出鸡头特征再提取形态学特征,结合支持向量机的死鸡识别方法。
首先对图像预处理,对应红外温度(T)—灰度值(G)线性函数,找到鸡头与背景的剥离温度阈值;计算出红外热像中鸡头平均灰度值,与设定的剥离阈值比较,保存图片中标记的样本目标。
提取鸡头样本的形态特征向量,并基于XGBoost进行特征筛选,选择得分排序前五的圆形度R、紧凑度J、离心率E、长轴长L、短轴长S作为分类特征向量,最后利用支持向量机分类器实现活鸡与死鸡的区分。
实验结果表明:在对比分类模型效果时,基于决策树算法的死鸡分类准确率为87.5%,基于BP神经网络和支持向量机算法的分类准确率为91.67% ,其中支持向量机分类算法召回率、F1和AUC的值最高。
可为实现多层立体笼养死禽自动识别提供1种新方法。
关 键 词:红外热成像;图像识别;死鸡;多特征值;XGBoost;SVM中图分类号:S24;S831开放科学(资源服务)标识码(OSID):文献标志码:AAutomatic identification method for dead chicken in cage based oninfrared thermal imaging technologyJIA Yanlin , XUE Hao,ZHOU Zixuan, ZHAO Xueqian, HUO Xiaojing, LI Lihua(College of Mechanical and Electrical Engineering, Hebei Agricultural University, Baoding 071001, China)Abstract: At present, the intensive chicken farm mainly adopts the layered three-dimensional cage mode to inspectthe dead chickens. Workers need to climb the escalator many times to screen out 10-15 dead chickens from nearly30000 chickens in the cages, which takes at least one and a half hours. The labor intensity is high, but the work issimple and repetitive. In order to improve labor efficiency and increase artificial intelligence to supplement labor-oriented talents, this paper combined image recognition analysis with infrared thermal imaging technology, andproposed a method for dead chicken recognition. The chicken head feature was stripped by temperature thresholdfollowed by extraction of the morphological feature combined with support vector machine. The image waspreprocessed according to the linear function of infrared temperature (T) - gray value (G) to determine the strippingtemperature threshold of chicken head from background. The average gray value of the chicken head in the infraredthermal image was calculated and compared with the set stripping threshold to save the sample target marked in收稿日期:2021-07-08基金项目: 国家自然科学基金项目(31902209);河北省重点研发计划项目(20327220D;20326630D);河北省现代农业产业创新团队岗位科学家(HBCT2018060204);河北省省级科技计划资助项目(22326607D).第一作者: 贾雁琳(1996—),女,河北石家庄人,硕士研究生,主要从事设施畜禽养殖环境控制与智能装备研究.E-mail:*****************通信作者: 李丽华(1979—),女,河北唐山人,博士,教授,主要从事设施畜禽养殖环境控制与智能装备研究.E-mail:*************.cn本刊网址:文章编号:1000-1573(2023)03-0105-08DOI:10.13320/ki.jauh.2023.0049106第46卷河北农业大学学报国内养殖场对蛋鸡的养殖方式多为多层笼养模式,饲养密度大,且室内环境差,人工巡检死鸡时,饲养员会吸入浮尘及有害气体,需上下攀爬扶梯挑拣死鸡,费时费力[1-3]。

HEBEINONGJI政教育具有明显优势。
通过分析地方农业院校的教学科研文化环境特色以及《机械原理》工科课程思政教育的特点,确定了河瀏衣泄上叔械斥報滋耗毎如詞;?也镇左谢冷韶誨质&衲&锵細•:蟲域邁质未貳秦隔上竦紘运府鐵盧詞4W ........................................................................................................................龙法禺”弊塊毒戏瑕横殆再粮.泮誉帝确览輕客鑑您與才郑缭楝极推莘卷隨紳療齐展掩起聽育捉佚储寮闰爭卸:H:关键词:机械工程;机械原理;课程思政;育人案例;教学方法地方农业磁机械原理》课程思她和计河北农业大学机电工程学院张秀花杨淑华李敬刘尚坤马洪亮张艺引言浇花浇根,育人育心。
育人之本,在于立德铸魂叫2020年6月1日,教育部印发了《高等学校课程思政建设指导纲要》,明确指出:“培养什么人、怎样培养人、为谁培养人是教育的根本问题”,而教师队伍是“主力军”、课程建设是“主战场”、课堂教学是“主渠道”,“使各类课程与思政课程同向同行,将显性教育和隐性教育相统一,形成协同效应”,突破思政、专业教育“两张皮”叫新时期专业课程将实行课程思政,实现价值引领、知识传授和能力培养有机融合的人才培养模式。
1河北农业大学《机械原理》课程思政优势与特色河北农业大学创建于1902年,是我国最早实施高等农业教育的院校之一,学校紧紧围绕国家农业重大需求开展教育教学和科学研究,专业课程的授课案例都带有明显的农业特色。
《机械原理》课程作为机械类专业的基础课,其地位举足轻重。
进行思政教育具有明显的优势,其主要表现在五个方面:一是学时多,一般学校都安排48-64学时;二是专业覆盖面广,涉及机械设计制造及自动化、车辆工程、农业机械化及自动化等本科专业;三是授课环节多,包括理论课、实验课、课程设计等环节;四是涉及到的学生基数大,河北农业大学机械类的学生每年的招生数量基本维持在500人左右(包括独立学院相关专业学生);五是开课的时间节点关键,一般安排在第四学期,在所有的专业课之前开设,这对于专业知识和专业素养的培养方面具有重要的作用。
微型农用履带式行走装置的设计方法孙振杰;刘俊峰;李彩风;李建平【摘要】针对履带式行走装置行驶路面特性复杂多变的特点,结合农业机械实际工作情况,查阅相关文献,总结农业履带行走装置的设计思路;以农业机械的实际工作环境为背景,对履带式行走装置以及关键机构的设计、参数的确定等问题进行了分析研究;就履带式行走装置在水平面内的接地长度、履带宽度和轨距,驱动轮、导向轮及支重轮设计参数进行分析;同时,又要考虑履带宽度和接地长度的取值不会影响转向性能和整机尺寸.由此为农业用履带行走装置的设计提供了设计思路和方法.【期刊名称】《农机化研究》【年(卷),期】2011(033)010【总页数】4页(P55-58)【关键词】履带车辆;支重轮;橡胶履带;接地比压【作者】孙振杰;刘俊峰;李彩风;李建平【作者单位】河北农业大学机电工程学院,河北保定 071000;河北农业大学机电工程学院,河北保定 071000;河北机电职业技术学院机械制造系,河北邢台 054048;河北农业大学机电工程学院,河北保定 071000【正文语种】中文【中图分类】S219.032.2;TH1220 引言履带式车辆具有接地面积大、接地比压小、附着性能好、爬坡能力强、转弯半径小及跨沟越埂能力强等优点,多数用于复杂地形车辆。
履带式行走装置广泛用于工程机械和农业机械等野外作业车辆,工作条件相对恶劣,要求该机构具有足够的刚度和强度、良好的行进和转向功能[1]。
现针对农业实际需要设计一种适合果园环境使用的履带式行走机械。
1 履带式行走装置的结构履带式行走装置一般由履带、驱动轮、导向轮、支重轮、托带轮和张紧装置构成。
履带与其所绕过的驱动轮、导向轮、支重轮和托带轮组成所谓的“四轮一带”,其结构如图1所示。
图1 履带式行走机构示意图Fig.1 Sketch of track walking履带式行走装置由连接回转支承装置的行走支架通过支重轮和履带将载荷传至地面,履带呈封闭环绕过驱动轮和导向轮。
DOI:10.19392/j.cnki.1671 7341.202010021新型清洁能源———蓝藻光伏发电石 涛 彭博涵 朱慧珠 李玉洁河北农业大学机电工程学院 河北保定 071000摘 要:自工业化发展以来,人们对能源的需求越来越强烈,地球上大量的自然资源都将被发达国家所消耗,而且,很多资源在地球中都是不可再生、有限的,因此,人们在发电中想利用更多的资源展开。
在开发新能源期间,微生物发电技术潜力巨大,对可持续发展能源具有重要的研究价值。
而蓝藻是一种可以利用光合作用来产生电能的藻类,能够长时间不间断发电,消除了传统太阳能电池对于太阳的依赖,具有更广阔的应用前景和推广可行性。
关键词:清洁能源;生物发电;蓝藻1清洁能源的重要性一个国家的发展需要能源的支持,也是保证民生的根本,在科技发展推动下,人们对能源的依赖更加强烈,能源的直接或间接消费已深入到我们生活的各个方面。
在进行工业化进程中,能源的大量消耗是发展的必然要求。
目前,中国是世界上最大的发展中国家,在世界上,属于生产与消费能源的第二大国家,目前,中国正处于黄金发展阶段,需求能源量较大,而在持续供应能源的条件下,强力的支撑着经济的发展。
人类为了实现可持续发展的目标,就需要发展与应用可再生资源,太阳能作为地球上供应量最大的可再生能源,对其的研究与开发,有着巨大的现实和科学研究意义,太阳能、生物能以及风能是中国目前所应用的清洁型能源,太阳能环保清洁,零污染,其也是源源不断的存在,这样在能源更替中,因为其这种优点所在,使得它无法被取代,所以,捕获太阳中能源的技术也将成为当今社会发展的主题。
2蓝藻发电———开辟清洁能源新领域提到蓝藻,人们都会首先联想到那漂浮在湖泊里的、绿油油的、散发着恶臭的生物,“水华”现象都是由其所引起的,这种物质的存在,严重的威胁着我们的生存与健康,然而,这种大型单细胞核生物,因为可以完成产氧性光合作用以及悠久的发展历史,在地球建设中,其价值也不容忽视,在整个地球大气中,它以大气到无氧再到有氧状态发展,是好氧生物发展与进化的载体。

第43卷第6期2020年11月河北农业大学学报JOURNAL OF HEBEI AGRICULTURAL UNIVERSITY Vol.43 No.6Nov.2020棚室电动履带式旋耕起垄一体作业机的设计研究王海楠,弋景刚(河北农业大学 机电工程学院,河北 保定 071001)摘要: 我国棚室等设施农业发展迅速,棚室电动履带式旋耕起垄一体作业机1次作业能够完成旋耕、起垄、覆膜3道工序,使用清洁能源,具有无污染、噪音小等优点。
依据棚室作业环境特点,对履带式底盘进行参数计算和分析;使用离散元方法对起垄成型部件进行仿真优化设计,确定了起垄成型部件距离旋耕刀辊轴距离为600 mm ,拨土转板的水平位置距离旋耕刀辊轴550 mm ,竖直方向上距离地面425 mm 处,并通过计算得出拨土转板的转速为270 r/min 即满足设计要求。
关 键 词: 棚室;旋耕;起垄;离散元;仿真中图分类号: S 222.3 开放科学(资源服务)标识码(OSID):文献标志码:ADesign and research of a shed electric tracked rotary cultivation andintegral working machineWANG Hainan, YI Jinggang(School of Mechanical and Electrical Engineering, Hebei Agricultural University, Baoding 071001, China )Abstract: China's sheds and other facilities have developed rapidly, but the annual continuous high-intensity and high-intensive production methods have caused many problems. The use of wide-row mulch double-row planting cultivation methods for shed tomatoes has an obvious yield increase effect. The electric crawler rotary ridge and ridge integrated operation machine in the shed can complete three processes of rotary cultivating, ridge and mulching in one operation. It uses clean energy and has the advantages of no pollution and low noise. According to the characteristics of the working environment of the shed, the parameters of the crawler chassis were calculated and analyzed; the discrete element method was used to simulate and optimize the ridge forming part, and the distance between the ridge forming part and the rotary blade roller axis was determined to be 600 mm. The horizontal position of the plate was 550 mm from the rotary blade roller shaft and 425 mm from the ground in the vertical direction. The calculated rotation speed of the shovel blade was 270 r / min, which met the design requirements.Keywords: shed; rotary tillage; ridge; discrete element; simulation文章编号:1000-1573(2020)06-0116-10DOI :10.13320/ki.jauh.2020.0121收稿日期:2020-04-04基金项目:河北省重大科技成果转化专项(17047203Z ).第一作者:王海楠(1993-),男,河北唐山人,硕士研究生,主要从事农业机械装备研究.E-mail:*****************通信作者:弋景刚(1961-),男,河北盐山人,教授,主要从事智能化农业装备与制造技术研究.E-mail:*************.cn 本刊网址:http: // hauxb. hebau. edu. cn: 8080 /CN/ volumn / home. shtml我国温室大棚等大型设施占世界设施农业生产面积的85%以上[1]。
2019.18科学技术创新1概述根据国家统计局数据显示,截止到2017年,中国60周岁及以上老年人口共计2.408亿;预计到2025年,这一人口数量将达到4亿,我国将成为世界上老年人占比最大的国家。
人口老龄化日益严重,空巢老人所占比重迅速攀升,一系列的社会问题亟待解决。
空巢老人由于没有亲人的陪伴,长期处于孤独的状态,从而引发一系列的生理、心理问题,如身体健康状况得不到重视,产生焦虑、抑郁心理疾病,所以给予空巢老人应有的关怀与陪伴已经刻不容缓。
日本作为目前世界上人口老龄化比较严重的国家,投入了大量的人力物力致力于老人陪伴机器人的研究,并且在近几年也取得了一些成果。
如图1所示:日本高校科研机构历时数年所研发的“TWENDY-ONE ”机器人,这款机器人可以辅助老人起床,并且可以自主行走,自行判断,避开障碍物;日本索尼公司在近几年推出的新一代机器人狗“爱宝”,该机器人可以感知外界的距离,并且具有发声和处理声音的功能,与其他陪伴型机器人不同,它的主要功能变成了娱乐;松下电器推出的老人陪伴机器人“泰迪”可以实现与老人的连续沟通;欧姆龙公司推出的机器人“尼克罗”采用人工毛皮,集成传感和人工智能技术,可以对主人表达自己的感受。
图1c.将底板通过仿真器与PC 机连接,可以通过CCS6界面显示出气压、海拔等信息。
结束语本文基于OMAPL138为处理器的ARM/DSP 双核架构,实现对GPS 和INS 信号的接收及处理,从而设计了GPS/INS 组合定位系统,实时显示当前位置的经纬度,气压等信息。
参考文献[1]赵胜林.一种GPS 导航定位仪设计与应用研究[D].哈尔滨:哈尔滨工业大学,2005.[2]马宏阳,程鹏飞,黄华东.GPS/INS 位置、速度和姿态全组合导航系统研究[J].测绘通报,2016(3):10-14.[3]Xue Y,Liu C,Chen Y,et al.Design and Realization of In -ertial Attitude Determination System Based on OMAPL138and FPGA[J].Computer Measurement &Control,2017.[4]赖贵川,黄华伟.基于MS5611-01BA01的高精度气压和温度检测系统设计[J].四川理工学院学报(自科版),2012,25(5):33-36.[5]朱阳,王伟成,王民慧.基于MPU9150的四轴飞行器姿态控制系统设计[J].制造业自动化,2015(10):46-48.作者简介:唐立伟(1975-),男,研究方向:工业控制。

500kV变电站谐振的PSCAD仿真与谐波分析侯晨伟;刘佳;郑少林;禹江;霍利民【摘要】An actual 500kV substation ferro-resonance on PSCAD simulation is performed,and the harmonic analysis of the simulation is carried out by using MATLAB software.The differ ent wind farm power and the different quantity and values of series compensation are simulated.The simulation waveform and the actual ferro-resonance waveform are analyzed,and the reasons of the ferro-resonance is found,according to which a method to suppress ferro-resonance is proposed.The method is validated in the actual substation operation.%在PSCAD上对实际500kV变电站谐振进行了仿真,并运用MATLAB软件对仿真得到的谐波数据进行了波形分析.模拟了不同风电厂功率及不同串联补偿装置数值和数量条件下变电站发生谐振的情况,分析了仿真谐振波形和实际谐振波形,找到谐振原因,并据此提出了抑制谐振的方法,并在实际变电站运行中得到验证.【期刊名称】《河北农业大学学报》【年(卷),期】2017(040)004【总页数】5页(P114-118)【关键词】PSCAD;500kV变电站;谐振【作者】侯晨伟;刘佳;郑少林;禹江;霍利民【作者单位】河北农业大学机电工程学院,河北保定071000;河北农业大学机电工程学院,河北保定071000;国家电网张家口市宣化区供电公司,河北张家口075000;保定市智能电脑有限公司,河北保定071000;中国地质大学长城学院,河北保定071000;河北农业大学机电工程学院,河北保定071000【正文语种】中文【中图分类】TM771在现代电力系统中,随着电力电子设备的广泛应用,给电网带来了谐波问题,并且谐波越来越成为影响电力系统安全稳定运行的一个重要因素[1-2]。
河北农业大学本科毕业设计设计题目蒸汽冷凝时给热系数和换热系数的测定实验平台设计学校河北农业大学学院机电工程学院专业班级热能与动力工程1002学生姓名马东学号*************指导教师闫震教师职称讲师日期2014年6月摘要在我们生活着的大千世界中发生着各种各样的过程,其中与人类的生存关系最为密切的物理过程之一就是热能的传递,这是我们生产和生活中普遍存在的物理现象,传热学历经长久的发展已经有了飞跃的进步,传热的研究主要针对于我们生活中温度的强化和削弱以及温度控制问题,而这些过程中传热系数的研究更是重中之重,本设计立足于传热系数在传热学领域中的重要作用,同时为了将理论和实践相结合,加强对知识的理解和变通同时提高对理论知识的实际应用,主要从传热的发展历史,系统原理,系统结构,组件选择,实验环节等几个方面入手,该设计主要针对两个部分进行设计,即管路系统结构设计和控制系统设计,管路系统以及控制系统中又针对主要组件如蒸汽发生器,气液分离器,热电偶,压力表等等进行设计和选型,在选型过程中在满足实验所需条件的情况下充分考虑了组件的实用性和性价比,力求经济性和简洁性,为了让系统设计既能完成数据的准确测定简洁的看到工作原理,其主要结构将采用开放式。
关键词:发展史;结构设计;组件选择。
AbstractPlace in the wider world we live in a variety of processes , one of which the survival of the human relationship with the physical process is most closely heat transfer , which is prevalent in our production and life physical phenomena , heat academic development has been a long leap of progress in the study of heat transfer is mainly for our lives to strengthen and weaken the temperature and temperature control problems, and to study these processes in heat transfer coefficient is a top priority , the design based on the important role of the heat transfer coefficient in the field of heat transfer , and in order to combine theory and practice to strengthen the understanding of knowledge and work while improving the practical application of theoretical knowledge , mainly from the development history of heat transfer , systems theory several aspects of the system architecture , component selection, labs and other aspects of the design of the main design for the two parts , namely piping system design and control system design , piping systems, and control systems but also for major components such as the steam generator case , a gas-liquid separator , thermocouples, pressure gauges , etc. design and selection, the selection process to meet the required conditions of the experiment in full consideration of the practicality and cost components , and strive economy and simplicity , to allow accurate determination of both the complete system design is simple to see that the data works , it will use the main structure open .Keywords : history ; structural design ; component selection .Keywords: history of development;structure design;component selectionII目录摘要 (I)Abstract (II)第1章绪论1.1传热学的发展简述 (1)1.2应用领域分析 (2)1.3设计目的与原则 (3)第2章系统分析2.1功能分析 (4)2.2结构分析 (4)2.3原理分析 (4)2.3.1从定义层面分析表面传热系数 (4)2.3.2从数学描述层面分析表面传热系数 (5)2.3.3用数学模型分析通过圆筒壁的传热过程计算 (6)2.3.4套管换热器传热过程平均温差的计算 (7)第3章系统设计3.1系统结构拟定 (10)3.2管路系统设计 (11)3.2.1蒸汽发生装置选择 (11)3.2.2气液分离器选择 (11)3.2.3换热器选择 (13)3.3控制系统设计 (14)3.3.1热电偶选择 (14)3.3.2温度巡检仪选择 (15)3.3.3接点压力表选择 (15)3.3.4安全阀的选择 (16)第4章实验环节4.1实验操作流程 (18)4.2测试方法 (18)4.3涉及公式 (19)4.4注意事项 (19)第5章设计总结 (20)致谢 (21)参考文献第1章绪论1.1传热学的发展简述18世纪30年代首先从英国开始的工业革命促进了生产力的空前发展。
河北农业大学机电工程学院
佚名
【期刊名称】《农业工程学报》
【年(卷),期】2005(21)5
【摘要】河北农业大学机电工程学院的前身是农业机械化系,始建于1958年!目前,学院下设农业机械化系、机械工程系、电气工程系、河北省人工智能研究中心和机电实习工厂等部门;并挂靠有河北省设备管理培训中心、河北汽车集团人才培训中心。
学院师资力量雄厚,现有教授11人,副教授22人,其中博士研究生导师5人,硕士研究生导师26人,10人在全国性专业学会任职,8人为国家及河北省科技成果鉴定专家。
【总页数】1页(Pi002-i002)
【关键词】机电工程学院;河北农业大学;农业机械化;科技成果鉴定;培训中心;1958年;机械工程系;博士研究生;硕士研究生;河北省;电气工程;实习工厂;研究中心;人工智能;设备管理;汽车集团;师资力量;专业学会;全国性;教授;人为
【正文语种】中文
【中图分类】S2-4;G647.5
【相关文献】
1.庆祝河北农业大学建校110周年——机电工程学院风采 [J],
2.面向新工科的机械类基础课程体系构建——以河北农业大学机电工程学院为例[J], 李浩;张秀花;王会强;孙铂
3.依托信息技术推动农业智慧化
——河北农业大学机电工程学院范晓飞教授 [J], 李莉
4.河北农业大学优秀教师机电工程学院张秀花 [J],
5.农业智能时代引航者——记河北农业大学机电工程学院教授范晓飞 [J], 祝传海因版权原因,仅展示原文概要,查看原文内容请购买。
基于智能手机的分布协同式农业专家咨询决策系统设计程曼1,袁洪波1,2,蔡振江1(1.河北农业大学机电工程学院,河北保定071001;2.中国农业大学现代精细农业系统集成研究教育部重点实验室,北京100083)摘要:农业专家咨询决策系统是发展精确农业、现代农业的一项重要技术,当前我国农业专家决策系统多为静态知识库,无法动态更新;系统普适性偏低,一个决策系统只针对一种作物;便携性较差,很难应用于农村基层。
针对这些问题,采用智能手机作为搭载平台,与后台计算机一起构建分布式、协同式农业专家决策系统,实现了专家决策系统的便携性、普适性、动态更新,使农业专家决策系统能够真正应用到农业生产一线,具有较高的使用价值。
关键词:智能手机;分布式系统;协同式系统;专家决策系统中图分类号:TP181文献标识码:A文章编号:1004-874X (2012)24-0195-04Distributed and collaborative system of agricultural expertconsultation and decision based on smart phoneCHENG Man 1,YUAN Hong-bo 1,2,CAI Zhen-jiang 1(1.College of Mechanical and Electrical Engineering,Hebei Agricultural University,Baoding 071001,China ;2.Key Lab on Modern Precision Agriculture System Integration Research,Ministry of Education,China Agricultural University,Beijing 100083,China )Abstract:Agricultural expert consultation and decision system is an important technology for the development of precision agriculture.But agricultural expert consultation and decision system of currently is static knowledge base mostly,and it can't be dynamically updated.The system's universal is lower,and it is difficult to be applied to the rural basic level.To solve these problems,the smart phones have been used as a platform,then a expert system have been building together with computer.The system is a distributed and collaborative.The system's characteristics are portability,universality and dynamic updates.The system can really apply to the agricultural production,and it has a higher value in using.Key words:smart phone;distributed system;collaborative system;expert consultation and decision system农业专家咨询决策系统是计算机技术及人工智能技术在农业中的一种应用,是一种计算机程序。
作者: 祝传海[1]
作者机构: [1]不详
出版物刊名: 科学中国人
页码: 63-65页
年卷期: 2020年 第23期
主题词: 种子质量检测;现代工程技术;河北农业大学;人工智能;机电工程学院;图像处理;智能时代;机器学习;
摘要:求学期间,他在图像处理、光谱成像、人工智能、自动化等现代工程技术领域艰难跋涉,在机器视觉、机器学习、图像处理等方面成绩卓著;工作后,他选择在生物医学、新品种育种、种子质量检测、农业生产优化、作物表型研究等领域孜孜以求,在农业人工智能领域开辟了一方天地;如今,踏上祖国的大地,他依然选择农业,志在为中国农业装上智能的眼睛……。
课程内容:本课程主要介绍工业自动化领域中常见物理量(压力、应变、位移、加速度、温度等)的传感器测量原理、测量电路原理和信号分析方法。
内容如下课程网络学习资源: 1.工程测试技术网络课件华中科技大学东北大学、东南大学2.工程测试网上虚拟实验室网上相关学习资源第一章、绪论本章学习要求:仁掌握测试技术的概念及研究内容2. 了解测试技术的应用情况3. 了解测试技术的发展动态4.本课程学习要求・测试工作的任务:解决如何获取有关研究对象的状态,运动和特性等方面的信息的问题。
・测试技术的研究内容:-测试技术是实验科学的_ 部分•主要研究各种物理量和测号M 法。
■ft 5OOC0简单的测试系统可以只有一个模块, 如玻璃管温度计。
它直接将被温度变化转化液面示值。
没有电量转换和分析电路,很简单, 但精度底,无法实现测量自动化。
为提高测量精度和自动化程度,以便于和其它环节一也构成自动化装置, 通常先将被测物理量转换为电量,再对电信号进行处理和输岀。
如图所示的声级计。
测试技术是进行各种科学实验研究和生产过程参数测量必不可少的手段,起着人的感官的作用。
-1OOC0测试系统是指由相关的器件、仪器和测试装置有机组合而成的具有获取某种信息之功能的整体。
如下图所示。
为了准确的获得被测对象的信息,要求测试系统中的每一个环节的输出量与输入量之间必须具有_一对应关系。
而且,其输出的变化能够准确地反映出其输入的变化,即实现不失真的测试。
激励装置一个被测对象的信息总是通过一定的物理量-信号所表现出来。
有些信息可以在被测对象处于自然状态时所表现出的物理量中显现出来,而有些信息却无法显现或显现的不明显。
在后一种情况下,需要通过激励装置作用于被测对象,使之产生出我们要获取的信息载于其中的一种新的传感器变磁通感应式传感器是将被测信息按一定规律转换成同种或别种量值输出的装直。
这种输出量通常是电信号。
1.2测试系统的组成河北农业大学机电学院调理环节•信号的调理环节是把来自传感器的Ri信号转换成更适合于进一步传输和处理的形式。
这种信号的转换,基本放大器多数是电信号之间的转换。
如幅值放大,将阻抗的变化转换成电压的变化或频率的变化等等。
信号的调制与解调信号处理环节•信号处理环节对来自信号调理环节的信号进行各种运算、滤波和分析四种滤波器的幅频特性显示记录环节•信号显示、记录环节是将来自信号处理环节的信号以观察者易于观察的形式来显示或存贮测试的结果。
反馈、控制环节・反馈控制环节主要应用于闭环控制系统中的测试系统。
机床轴承故障监测系统4■振动信号带通滤波A/D变换FFT变换信号频谱轴承报警信息如y1 • 3测试技术的工程应用工程技术领域1v工业自动化中的应用在各种自动控制系统中,测试环节起着系统感官的作用,是其重要组成部分。
a)机械手、机器人中的传感器广州中鸣数码的机器狗转动/移动位置传感器、力传感器.视觉传感器、听觉传感器、接近距离传感器、触觉传感器、热觉传感器、觉传感器。
/ ----- --------\:■卜till:么■ ■八■mu 1b) AGV自动送货车香港理工AGV模型Automated Guided Vehicles判断建筑物内人和物所在位置;超声波测距传感器:红外线色彩传感器:运动轨迹和AGV小车位置识别;条形码传感器:货品识别。
C)生产加工过程监测切削力传感器,加工噪声传感器,超声波测距传感器、红外接近开关传感2、流程工业设备运行状态监控在电力、冶金、石化、化工等流程工业中,生产线上设备运行状态关系到整个生产线流程。
通常建立24小时在线监测系统。
石化企业输—油管道、储G油罐等压力容器的破损和泄露检测。
3、产品质量测量在汽车、机床等设备,电机、发动机等零部件出厂时, 必须对其性能质量进行测量和出厂检验。
图示为汽车出厂检验原理框图,测量711汽车扭距测量参数包括润滑油温度、冷却水温度、燃油=1压力及发动机转速等。
通过对抽样汽车的测试,工程师可以了解产品质量。
机床加工精度测量风机性能自动测试系统步进电,1减速器压力则• • • • •• •压差魏縊□风筒[=W4、家庭与办公自动化在家电产品和办公自动化产品设计中,人们大量的应用 了传感器和测试技术来提高产品性能和质量。
1、全自动洗衣机中应检测那些物理量?2、举出一些生活中常见的家电几办公自动化产品应用 传感器的例子指纹传感器—5、其他应用农业电:: 你还能举出一些农业工程中应用测试技术的例子吗?6、PC机中的测试技术应用声位笔:超声波传感器麦克风:电容传声器声卡:A/D卡+ D/A卡软驱:速度,位置伺服测控实验DI Y1•鼠标测位移实验2•麦克风测声音2■声卡彙样频率信号分析频率合成与分解3•简易声级计制作D图象分析jHDXVI復速町盖爼虫楸仪題实数•平台M ScriptOH东进工且麥«5扩眾件工且收第关于1二1口1幻妙回⑶ "El伽I功丨的呂乙兰IS畀妙耳題査 + 炒制(aiMneri fJ I _________________________________(J http://vrz ccn 储:6? T 394)个人测试实验室1.4测试技术的发展趋势 1、庙感器方面町利用新发现的材料和新发现的生物、物理、化学效 应开发出的新型传感器 .量电光OOOO◎生物酶血样分析传感器光纤流速传感器材作子感 光制电传荧料的鼻器第一章.绪论b)传感器+嵌入式计算机-智能传感器智能倾角RS232传感器叫Vl)l>IC总线数字温度传感器嵌入式计算机振动网络传感器I IS*1X202、测量信号处理方面计算机虚拟仪器技术用PC 机+仪器板卡to ->代替传统仪器 用计算机软件代替硬件分析电路HH)「肓丁xj¥olt«Vraa4/M25 CO50VxHt2S我们的工作皿Top ~时叱折彌色分折常功退出东曼理jfi 侯号F.»k Fr.d 2€3.72Mvm rtwBumper Test Summary• A2 4・ D P.・•G A. 1s z 一•-VO.0.» 0 0< 0.« 0 \Z16 0Sec思考题:1.列出你身边的测试技术应用的例子。
1.5测量的基础知识★测量方法1.直接测量(绝对测量、相对测量)•直接测量:直接将被测量与标准量进行比较十标准计量单位(如米尺、光栅尺、r激光)绝对测量定值标准量(如某一固定尺寸)相对测量“绝对测量: 采用仪器、设备、手段测量被测量,直接得到测量值• •■■■• • •■■■• • •■■■• • • •■■■■ • •■■■■ • H •测量结果:20.1 mm特点:简单、直观、明了;测量精度不高2■间接测量—相对测量: 得到偏差值基准量:20.00 mm+0.08 mm结果:20.08 mm特点:精度高;复杂、成本高、要求高将被测量直接与基准量比较, 测量值:测量与被测量有一定函数关系的参量,被测量由计算获得如测导线的导电率P :417id2R★与测量装置相关的术语标称范圉:测量器具标尺范II所对应的被测量示值的范圉。
量程:标称范圉的上下限之差的模。
测量范IB :是指测试装置能正常测量最小输入量和最大输入量之间的范圉。
(测量仪器的误差处在规定极限内)稳定性:是指在一定工作条件下,当输入量不变时,输出量随时间变化的程度。
★测量误差1、测量误差的定义:测量所得数据与其相应的真值之差…1)绝对误差测量误差=测得值-真值Ax = x -」客观真实值(未知)①约定真值:世界各国公认的几何量和物理量的最高基准的量值如:米…公制长度基准光在真空中1S时间内传播距离的1/299792485②理论真值:设计时给定或用数学、物理公式计算出的给定值(3)相对真值:标准仪器的测得值或用来作为测量标准用的标准器的值2、测量误差的分类:按误差来源:装置误差、环境误差、方法误差、人员误差按特性规律:系统误差、随机误差、粗大误差① 系统误差(System error)—有规律可循由特定原因引起、具有一定因果关系并按确定规律产生—装置、环境、动力源变化、人为因素再现性… 偏差(Deviation )理论分析/实验验证…原因和规律…减少/消除② 随机误差(Random error )因许多不确定性因素而随机发生偶然性(不明确、无规律)概率和统计性处理(无法消即修正)③粗大误差(Abnormal error)检测系统各组成环节发生异常和故障等引起异常误差-混为系统误差和偶然误差-测量结果失去意义分离…防止3、误差的表示方法:1)绝对误差:测量某量所得值与其真值(约定真值)之差。
2 )相对误差:绝对误差与约定真值之比。
用百分数表示。
相对误差越小,测量精度越高。
3)引用误差:装置示值绝对误差与装置量程之比。
例如,测量上限为100克的电子秤,秤重60克的标准重量时,其示值为60・2克,贝!|该测量点的引用误差为:(60.2-60) 4-100=0.2% 4)分贝误差:分贝误差=20 X仪(测量结果-真值)★测量精度和不确定度精度等级:用来表达装置在符合一定的计量要求情况下,能保持其误差 在规定的极限范围内。
一、精度:测量结果与真值吻合程度 定性概念precision accuracy a )精密度 b )正确度 c )准确度。