2018年中国计量大学821自动控制原理2考研真题
- 格式:doc
- 大小:68.50 KB
- 文档页数:3
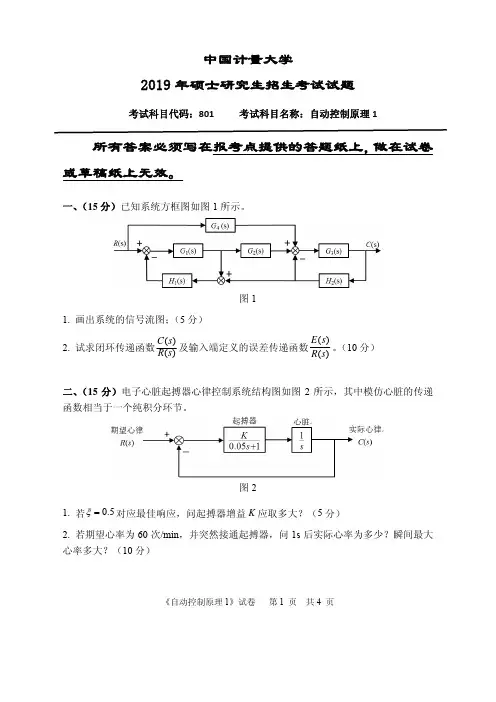
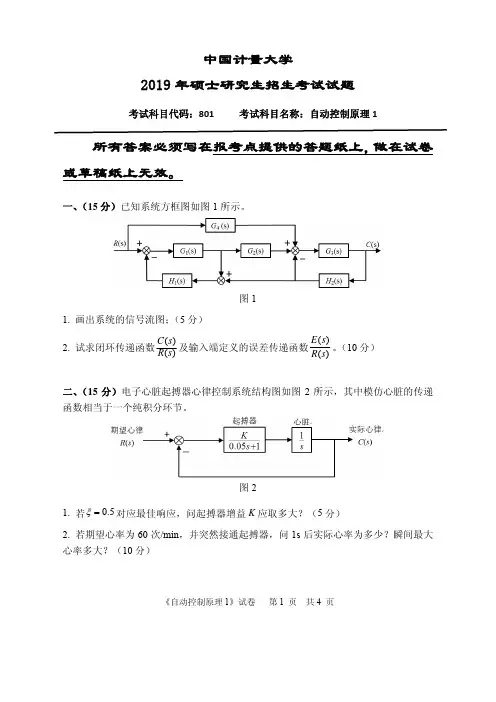
《自动控制原理1》试卷 第1 页 共4 页中国计量大学2019年硕士研究生招生考试试题考试科目代码:801 考试科目名称:自动控制原理1所有答案必须写在报考点提供的答题纸上,做在试卷或草稿纸上无效。
一、(15分)已知系统方框图如图1所示。
图11. 画出系统的信号流图;(5分)2. 试求闭环传递函数)()(s R s C 及输入端定义的误差传递函数)()(s R s E 。
(10分)二、(15分)电子心脏起搏器心律控制系统结构图如图2所示,其中模仿心脏的传递函数相当于一个纯积分环节。
图21. 若5.0=ξ对应最佳响应,问起搏器增益K 应取多大?(5分)2. 若期望心率为60次/min ,并突然接通起搏器,问1s 后实际心率为多少?瞬间最大心率多大?(10分)《自动控制原理1》试卷 第2 页 共4 页三、(15分)系统结构图如图3所示,[]()()()e t r t b t =−。
图31. 已知G 1(s )的单位阶跃响应为21e t −−,试求G 1(s );(5分) 2. 利用求出的G 1(s ),当r (t )=10·1(t )时,试求:①系统的稳态输出;②系统的超调量、调节时间和稳态误差。
(10分)四、(15分)已知系统结构图如图4所示:图41. 绘出K *从0→+∞变化时系统的根轨迹;(8分)2. 确定系统处于欠阻尼条件下的K *范围;(4分)3. 确定系统稳定时的最小阻尼比。
(3分)五、(15分)已知系统传递函数为)52)(2()(2+++=s s s K s G ,1. 画出奈奎斯特图;(10分) 2. 当K =52,利用奈奎斯特稳定判据判断其闭环系统的稳定性。
(5分)六、(15分)已知最小相位开环系统的渐近对数幅频特性如图5所示,试求: 1. 系统的开环传递函数;(4分) 2. 截止频率c ω和相角裕量γ;(8分)3. 若使截止频率s rad c /10=ω,其放大倍数应取多少?(3分)《自动控制原理1》试卷 第3 页 共4 页七、(20分)已知采样系统结构如图6所示,其中采样周期s T 4.0=。
《自动控制原理1》试卷 第1 页 共3页
中国计量大学
2018年硕士研究生招生考试试题
考试科目代码:801 考试科目名称:自动控制原理1
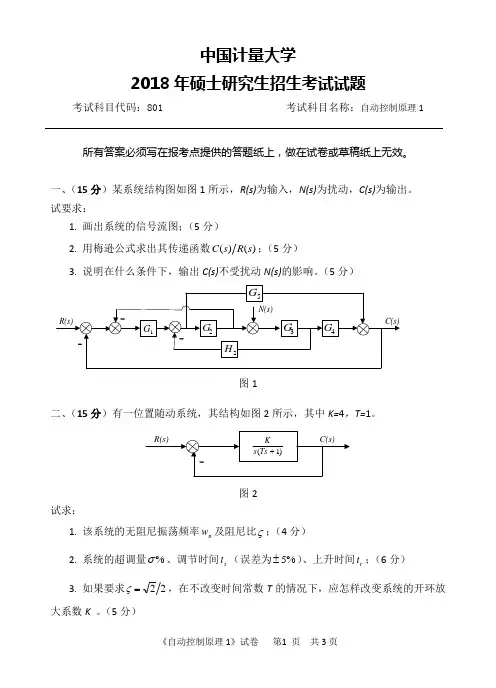
所有答案必须写在报考点提供的答题纸上,做在试卷或草稿纸上无效。
一、(15分)某系统结构图如图1所示,R(s)为输入,N(s)为扰动,C(s)为输出。
试要求:
1. 画出系统的信号流图;(5分)
2. 用梅逊公式求出其传递函数)()(s R s C ;(5分)
3. 说明在什么条件下,输出C(s)不受扰动N(s)的影响。
(5分)
图1
二、(15分)有一位置随动系统,其结构如图2所示,其中K=4,T=1。
图2
试求:
1. 该系统的无阻尼振荡频率n w 及阻尼比ς;(4分)
2. 系统的超调量%σ、调节时间s t (误差为%5±)、上升时间r t ;(6分)
3. 如果要求22=ς,在不改变时间常数T 的情况下,应怎样改变系统的开环放大系数K 。
(5分)。
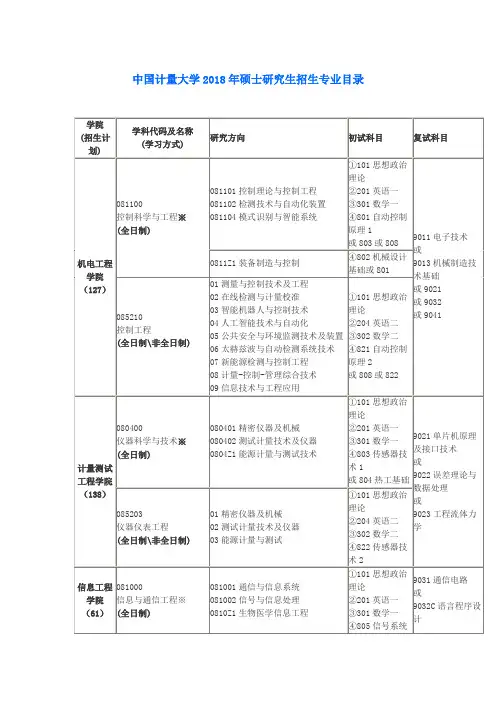
目录
2018 年中国计量大学822传感器技术2考研真题试题试卷 (2)
2018年中国计量大学考研真题试题试卷
一、名词解释(每题3分,共30分)
1.热电阻传感器
2.磁致伸缩效应
3.涡流效应
4.传感器的迟滞
5.压阻效应
6.光生伏特效应
7.电容的边缘效应
8.气敏传感器
9.不等位电势
10.光电耦合器件
二、填空题(每空0.5分,共20分)
1.将两种不同的导体或半导体两端相接组成闭合回路,当两接点的温度不同时,则在回路中产生,并形成。
这种现象称塞贝克效应,即热电效应。
实验指出,当组成热电偶的材料A、B为均质材料时,回路电动势只与有关,与有关,而与热电偶的和无关。
这样我们就可以将热电偶做成传感器,也可以做成测量与之有关的其他物理量的传感器。
热电偶回路产生的热电动势由和两部分组成。
2.感应同步器是利用两个的互感随不同而变化的原理组成的,可用来测量或,对应的感应同步器分别称为和。
感应同步器的信号处理方式分为
和两大类。
3.光电式传感器的工作原理,是首先把被测量的变化转换成的变化,然后通过变换成。
光电式传感器一般由、和三部分组成。
被测量作用于
《传感器技术2》试卷第1页共5页。
北京工业大学2018年硕士研究生招生考试试题目代码:821 科目名称:
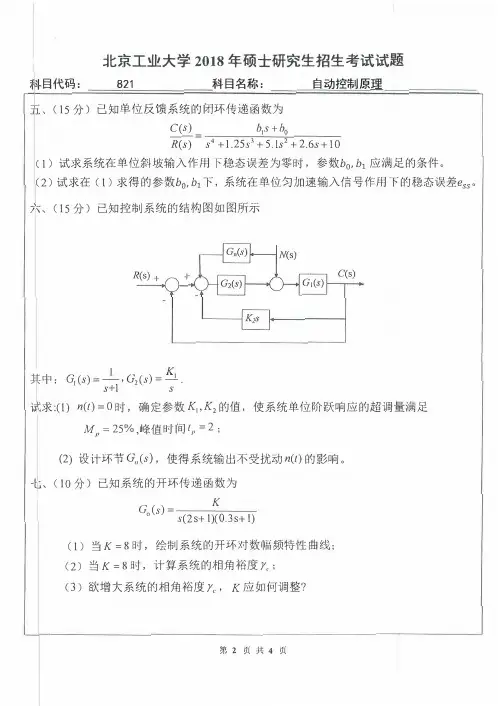
、(15分)已知单位反馈系统的闭环传递函数为
C(s ) =沁+b 。
自动控制原理R (s ) s 4 +l.25s 3 +5.1s 2 +2.6s+l O Cl)试求系统在单位斜坡输入作用下稳态误差为零时,参数b。
,h 1应满足的条件。
(2)试求在(1)求得的参数b。
,h 1下,系统在单位匀加速输入信号作用下的稳态误差esso 六、(15分)已知控制系统的结构图如图所示其K 中:G 1(s ) =—, G 2(s ) = _J_. k s+l
s i求:(1) n (t )=O 时,确定参数K i ,K 2的值,使系统单位阶跃响应的超调量满足M" =25%, 峰值时间t,,=2: (2)设计环节G ,(s ),使得系统输出不受扰动n (t )的影响。
t 、(10分)已知系统的开环传递函数为
G 。
(s )= K s (2s+ 1)(0.3s+ 1) (1)当K=8时,绘制系统的开环对数幅频特性曲线;
(2)当K=8时,计算系统的相角裕度Y e :(3)欲增大系统的相角裕度Y e ,K 应如何调整?第2页共4页。
本试卷共8大题,共3页。
图1是液面自动控制系统的两种原理示意图。
在运行中,希望液面高度0H 维持不变。
(1)试说明各系统的工作原理。
(2)画出各系统的方框图,并说明被控对象、给定值、被控量和干扰信号是什么?二、(15分)试用梅逊公式列写图2所示系统的传递函数)(/)(s R s C 。
单位反馈开环传递函数为)10)(2()(10)(+++=s s s a s s G ,(1)试确定使系统稳定的a 值;(2)使系统特征值均落在S 平面中1Re -=这条线左边的a 值。
四、(20分)设单位负反馈系统开环传递函数为1)(+=Ts K K s G g p 。
如果要求系统的位置稳态误差0e ss =,单位阶跃响应的超调量%3.4=Mp ,试问p K 、g K 、T 各参数之间应保持什么关系?五、(20分)单位反馈系统的开环传递函数为:)1)(2()52()(2-++-=s s s s K s G (1)绘制系统的根轨迹(2)确定使系统闭环传递函数具有阻尼比0.5的K 值六、(20分)一控制系统如图3所示。
当t t r =)(,要求系统的稳态误差小于0.2,且增益裕量不小于6dB。
试求增益K 的取值范围。
七、(20分)已知最小相位系统的开环对数幅频特性)(0ωL 和串联校正装置的对数幅频特性)(ωc L 如图4所示,原系统的幅值穿越频率为s rad c /3.24=ω;(1)写出原系统的开环传递函数)(0s G ;(2)写出校正装置的传递函数)(s G c ;(3)写出校正后的开环传递函数)()(0s G s G c ,画出校正后系统的开环对数幅频特性)(ωGC L 。
图4八、(20分)求图5所示系统的闭环脉冲传递函数。
图50.010.11101000.322024.340-20dB/dec-20dB/dec -40dB/dec -60dB/dec L(ω)ωL 0L c。
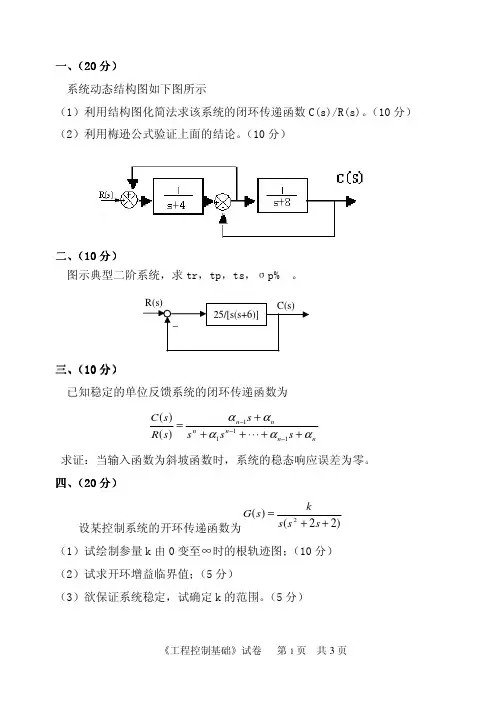
系统动态结构图如下图所示(1)利用结构图化简法求该系统的闭环传递函数C(s)/R(s)。
(10分)(2)利用梅逊公式验证上面的结论。
(10分)二(、(110分)图示典型二阶系统,求tr,tp,ts,σp% 。
三(、(110分) 已知稳定的单位反馈系统的闭环传递函数为n n n n n n s s s s s R s C ααααα++⋅⋅⋅+++=−−−1111)()(求证:当输入函数为斜坡函数时,系统的稳态响应误差为零。
四(、(2020分)设某控制系统的开环传递函数为)22()(2++=s s s ks G (1)试绘制参量k 由0变至∞时的根轨迹图;(10分)(2)试求开环增益临界值;(5分)(3)欲保证系统稳定,试确定k 的范围。
(5分)已知反馈控制系统的开环传递函数为:)15)(5()1(250)(2+++=s s s s s G ,绘制其乃氏图,并应用Nyquist 稳定判据说明此时闭环系统的稳定性。
六(、(1515分)已知系统特征方程如下,试求系统在s 右半平面的根数及虚根值。
(1)04832241232345=+++++S S S S S ;(8分)(2)0160161023=+++S S S 。
(7分)七(、(2020分)已知一阶系统的方框图如图所示。
设()t t r =,试求:(1)系统具有几型精度?(5分)(2)单位斜坡输出响应;(10分)(3)系统能否跟踪斜坡输入?(5分)八(、(2020分)单位负反馈系统的开环传递函数为120()(2)(10)G s s s s =++ , (1) 绘制系统开环bode 图;(10分)(2) 求出系统的截止频率和相位裕度;(6分)(3) 判别闭环系统的稳定性。
(4分)九(、(110分) 试求下列函数的初值和终值:)8.0)(18.0()1()(2222+++−++=z z z z z z z z E十(、(110分)已知离散系统的特征方程为32()17292770F z z z z =+++=,应用劳斯判据确定系统的稳定性。
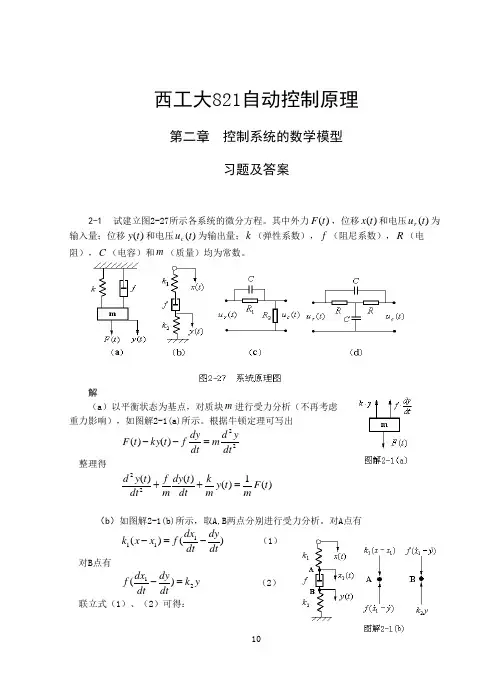
西工大821自动控制原理第二章 控制系统的数学模型习题及答案2-1 试建立图2-27所示各系统的微分方程。
其中外力)(t F ,位移)(t x 和电压)(t u r 为输入量;位移)(t y 和电压)(t u c 为输出量;k (弹性系数),f (阻尼系数),R (电阻),C (电容)和m (质量)均为常数。
解(a )以平衡状态为基点,对质块m 进行受力分析(不再考虑重力影响),如图解2-1(a)所示。
根据牛顿定理可写出22)()(dty d m dt dy f t ky t F =-- 整理得)(1)()()(22t F m t y m k dt t dy m f dt t y d =++(b )如图解2-1(b)所示,取A,B 两点分别进行受力分析。
对A 点有 )()(111dtdydt dx f x x k -=- (1) 对B 点有 y k dtdydt dx f 21)(=- (2) 联立式(1)、(2)可得:dtdx k k k y k k f k k dt dy2112121)(+=++ (c) 应用复数阻抗概念可写出)()(11)(11s U s I cs R cs R s U c r ++= (3) 2)()(R s Uc s I = (4)联立式(3)、(4),可解得: CsR R R R Cs R R s U s U r c 212112)1()()(+++=微分方程为: r r c c u CR dt du u R CR R R dt du 121211+=++(d) 由图解2-1(d )可写出[]Css I s I s I R s U c R R r 1)()()()(++= (5) )()(1)(s RI s RI Css I c R c -= (6) []Css I s I R s I s U c R c c 1)()()()(++= (7)联立式(5)、(6)、(7),消去中间变量)(s I C 和)(s I R ,可得:1312)()(222222++++=RCs s C R RCs s C R s U s U r c 微分方程为 r r r c c c u RC dt du CR dt du u R C dt du CR dt du 222222221213++=++2-2 试证明图2-28中所示的力学系统(a)和电路系统(b)是相似系统(即有相同形式的数学模型)。
设一单位反馈控制系统的开环传递函数为:
1
9
)(+=
s s G 求系统在)452cos(2)( -=t t r 输入信号作用下的稳态输出。
二、(15分)
画出如下系统的信号流图并求出系统的传递函数)
()(s R s C 。
⎪⎪⎩⎪⎪⎨⎧+==-=--=)
()()()()()()()()()()()()()()()()()(33242232112311s X s G s X s G s C s X s G s X s C s H s X s G s X s X s H s C s R s X 三、(20分)
反馈系统中,前向传递函数为)10()
40()(++=
s s s k s G ,反馈回路传递函数为20
1)(+=s s H
1.试确定使系统稳定的k 的取值范围;
2.确定能使系统临界稳定的K 值,并计算此时系统的根。
四、(20分)
机器人控制系统结构图如图1所示。
试确定参数K1,K2值,使系统单位阶跃响应的峰值时间s t p 5.0=,超调量%2=p σ。
图1
单位反馈系统的开环传递函数为:
8
4)1()(2+-+=
s s s K s G
1.绘制系统的根轨迹;
2.确定使系统闭环稳定时开环增益K 的取值范围。
六、(20分)
系统的开环传递函数为
)
12.0(4)()(2+=
s s s H s G
1.绘制系统的Bode 图,并求系统的相角裕度γ;
2.在系统中串联一个比例加微分环节(s+1),绘制此时系统的Bode 图,并求系
统的相角裕度γ;
3.说明比例加微分环节对系统性能的影响。
七、(20分)
设一单位反馈控制系统的开环传递函数为
4
()(s 2)
G s s =
+
试设计一超前校正装置,使校正后系统的静态速度误差系数120v K s -=,相位裕量50γ=。
增益裕量20lgK g = 10dB 。
设离散系统如图2所示,采样周期T=1s,其中G
h (s)为零阶保持器,而
)1
2.0(
)
(
+
=
s
s
K
s
G,
要求:
1.当K=5时,分别在w域和z域中分析系统的稳定性;
2.确定使系统稳定的K值范围。
图2 采样控制系统
【完】。