数字控制振荡器
- 格式:pdf
- 大小:155.25 KB
- 文档页数:3

dcxo工作原理DCXO(Digitally Controlled Crystal Oscillator)是一种数字控制晶体振荡器,它是通过数字控制电路来调节晶体振荡频率的。
它的工作原理是利用晶体振荡器的特性,通过数字控制电路来改变晶体振荡频率,从而实现精确稳定的时钟信号输出。
DCXO的核心部件是晶体振荡器。
晶体振荡器是一种利用晶体的特性进行振荡的电子元件,其基本原理是利用晶体的压电效应和谐振效应。
晶体振荡器由晶体谐振器、放大器和反馈网络组成。
晶体谐振器是通过将晶体片与电容和电感等元件连接在一起来实现的。
当通过谐振频率的电压信号作用于晶体片时,晶体片会发生压电效应,从而使晶体片振动,产生稳定的振荡信号。
放大器将晶体振荡器产生的弱振荡信号放大,然后通过反馈网络将一部分输出信号再反馈到晶体谐振器上,使晶体振荡器保持稳定的振荡。
通过调节晶体谐振器的电容和电感等元件的数值,可以改变晶体振荡器的振荡频率。
DCXO通过数字控制电路来调节晶体振荡器的电容和电感等元件的数值,从而改变晶体振荡器的振荡频率。
数字控制电路通常由微控制器、数字逻辑电路和数字-模拟转换器(DAC)等组成。
微控制器负责接收外部输入的控制信号,然后通过数字逻辑电路进行处理,最终将处理结果转换成模拟信号输出到DAC。
DAC将模拟信号转换成电压或电流信号,然后通过控制电路调节晶体振荡器的电容和电感等元件的数值。
DCXO的工作原理可以简单概括为以下几个步骤:首先,微控制器接收外部输入的控制信号,根据控制信号的数值确定需要调节的振荡频率。
然后,数字逻辑电路根据控制信号的数值计算出相应的调节数值。
接下来,数字-模拟转换器将计算结果转换成模拟信号输出到DAC。
最后,DAC将模拟信号转换成电压或电流信号,通过控制电路调节晶体振荡器的电容和电感等元件的数值,从而改变振荡频率。
DCXO广泛应用于各种需要精确稳定时钟信号的领域,如通信系统、计算机网络、无线电设备等。

数字控制振荡器工作原理
数字控制振荡器(Digital Controlled Oscillator,DCO)是一种基于数字信号处理技术的振荡器,其工作原理是通过控制数字信号的频率来实现振荡器的频率调节。
DCO广泛应用于数字通信、音频处理、频率合成等领域。
DCO的核心是一个数字控制的振荡器电路,其基本结构包括振荡器核心、数字控制单元和输出缓冲器。
振荡器核心是由一个电感和一个电容组成的谐振电路,其频率与电感和电容的数值有关。
数字控制单元通过改变电容的数值来改变振荡器的频率,从而实现频率的调节。
输出缓冲器将振荡器的输出信号放大并输出到外部电路中。
DCO的频率调节是通过改变电容的数值来实现的。
数字控制单元通过控制电容的开关状态来改变电容的数值,从而改变振荡器的频率。
具体来说,数字控制单元将一个二进制数值转换为一组开关控制信号,这些信号控制电容的开关状态,从而改变电容的数值。
通过改变二进制数值,可以实现振荡器频率的微调和精确控制。
DCO的优点是频率调节范围广、精度高、稳定性好、功耗低等。
与传统的模拟振荡器相比,DCO具有更高的频率调节范围和更好的频率稳定性。
此外,DCO的功耗较低,适合用于低功耗应用场景。
总之,数字控制振荡器是一种基于数字信号处理技术的振荡器,其工作原理是通过控制数字信号的频率来实现振荡器的频率调节。
DCO具有频率调节范围广、精度高、稳定性好、功耗低等优点,广泛应用于数字通信、音频处理、频率合成等领域。

ltc6904 范例LTC6904是一款高性能的数字控制电压控制振荡器(DCVCO),由ADI (安富利)公司生产。
它可以通过I2C接口进行配置和控制,提供了高精度的频率合成功能。
LTC6904的范例应用广泛,本文将介绍其工作原理以及在实际应用中的一些案例。
我们来了解一下LTC6904的基本原理。
它是一种基于电容的振荡器,通过改变电容的充放电时间来调节输出频率。
LTC6904内部有一个电容阵列,可以通过配置寄存器来选择不同的电容组合,进而实现不同的频率输出。
此外,LTC6904还可以通过I2C接口调节电压控制输入(VCOIN)来进一步微调频率。
LTC6904的工作电压范围为2.7V至5.5V,输出频率范围为0.1Hz至20MHz。
它具有非常低的频率漂移和相位噪声,能够提供高度稳定的频率输出。
此外,LTC6904还提供了多种工作模式,包括连续振荡模式、单次振荡模式和脉冲振荡模式,可以满足不同应用的需求。
在实际应用中,LTC6904可以广泛应用于时钟生成、频率合成、数字信号处理等领域。
下面我们将介绍一些具体的应用案例。
首先是时钟生成。
在很多系统中,需要一个稳定的时钟信号来同步各个模块的工作。
LTC6904可以提供高精度的时钟信号,且可以通过I2C接口实时调节频率。
这使得它在通信系统、数据采集系统等领域中得到广泛应用。
其次是频率合成。
频率合成是将多个不同频率的信号合成为一个特定频率的信号。
LTC6904可以通过调节电容组合和VCOIN输入,实现精确的频率合成。
这在无线通信系统、雷达系统等需要频率合成的应用中非常常见。
LTC6904还可以用于数字信号处理。
在数字信号处理中,需要对信号进行数字化、滤波、解调等处理。
LTC6904可以提供稳定的时钟信号,为数字信号处理提供精确的时间基准。
这在音频处理、图像处理等领域中非常重要。
LTC6904是一款功能强大的数字控制振荡器,具有高精度、稳定性好的特点。
它可以通过I2C接口进行配置和控制,广泛应用于时钟生成、频率合成、数字信号处理等领域。

实验三 用定时器实现数字振荡器1 实验目的在数字信号处理中,会经常使用到正弦/余弦信号。
通常的方法是讲某个频率的正弦/余弦值余弦计算出来后制成一个表,DSP 工作时仅作查表运算即可。
在本实验中将介绍另一种获得正弦/余弦信号的方法,即利用数字振荡器用叠代方法产生正弦信号。
本实验除了学习数字振荡器的DSP 实现原理外,同时还学习C54X 定时器使用以及中断服务程序编写。
另外,在本实验中我们将使用汇编语言和C 语言分别完成源程序的编写。
2 实验要求本实验利用定时器产生了一个2kHz 的正弦信号,定时器被设置成每25uS 产生一次中断,(等效于采样速率未40k )利用该中断,在该中断服务程序中用叠代算法计算出一个SNT 值,病利用CCS 的图形显示功能查看波形。
3 实验原理(1)数字振荡器原理设一个传递函数为阵线序列sinkwT ,其z 变换为111BzAz 1Cz )z (H -----=其中,A =2coswT ,B =-1,C=sinwT 。
设初始条件为0,求出上式的反Z 变换得: y[k]=Ay[k-1]+By[k-2]+Cx[k-1]这是个二阶差分方程,其单位冲击响应即为sinkwT 。
利用单位冲击函数x[k-1]的性质,即仅当k=1时,x[k-1]=1,代入上式得:k=0 y[0]=Ay[-1]+By[-2]+0=0k=1 y[1]=Ay[0]+By[-2]+c=ck=2 y[2]=Ay[1]+By[0]+0=Ay[1]k=3 y[3]=Ay[2]+By[1]k=n y[n]=Ay[n-1]+By[n-2]在k ﹥2以后,y[k]能用y[k -1]和y[k-2]算出,这是一个递归得方法。
根据上面得说明,我们可以开始数字振荡器得设计。
设该振荡器得频率为2kHz,采样率为40kHz (通过定时器设置,每隔25us 中断一次,即产生一个y[n])则递归得差分方程系数为:A =2coswT=2cos(2×PI ×2000/40000)=2×0.95105652B=-1C=sinwT=sin(2×PI ×2000/40000)=0.3090169979BC 22A 15=⨯ C00022B 15=⨯ 13C722C 15=⨯ 为了便于定点DSP 处理,我们将所有系数除以2,然后用16为定点格式表示为: 这便是本实验中查生2kHz 阵线信号的三个系数。




数字高频调谐器原理与结构分析数字高频调谐器是一种用于调节高频信号频率的装置,它在无线通信、雷达、卫星通信等领域起着重要的作用。
本文将详细介绍数字高频调谐器的原理和结构,并分析其工作过程。
一、原理数字高频调谐器的原理基于频率合成和滤波技术。
其主要功能是将输入的高频信号调整到指定的频率范围内,并滤除不需要的频率分量。
其原理主要包括以下几个方面:1. 数字频率合成数字高频调谐器采用数字信号处理技术,通过数字频率合成器将输入的高频信号调整到目标频率范围内。
数字频率合成器是由相位锁定环路(PLL)和数字控制振荡器(DCO)组成的。
相位锁定环路用于锁定输入信号的相位,而数字控制振荡器则根据相位锁定环路的输出生成目标频率的高频信号。
2. 数字滤波数字高频调谐器还需要进行滤波处理,以滤除不需要的频率分量。
滤波器通常采用数字滤波器,其主要功能是在目标频率范围内增强信号的幅度,并在其他频率范围内削弱信号的幅度。
数字滤波器可以通过滤波算法实现,常用的算法包括有限脉冲响应(FIR)滤波器和无限脉冲响应(IIR)滤波器。
3. 数字控制数字高频调谐器还需要进行数字控制,以实现对频率和滤波参数的调节。
数字控制可以通过微处理器或可编程逻辑器件实现,通过调节相位锁定环路和数字滤波器的参数,可以实现对输入信号的精确调谐。
二、结构数字高频调谐器的结构主要包括输入端、数字频率合成器、数字滤波器和输出端。
下面将对每个部分进行详细介绍。
1. 输入端输入端主要用于接收外部的高频信号。
它通常包括天线、前置放大器和滤波器。
天线用于接收无线信号,并将其转换为电信号。
前置放大器用于放大电信号的幅度,以提高信号的强度。
滤波器用于滤除不需要的频率分量,以减少噪声和干扰。
2. 数字频率合成器数字频率合成器是数字高频调谐器的核心部分。
它由相位锁定环路和数字控制振荡器组成。
相位锁定环路用于锁定输入信号的相位,以实现相位同步。
数字控制振荡器根据相位锁定环路的输出生成目标频率的高频信号。

nco工作原理NCO工作原理NCO(Numerically Controlled Oscillator)是一种数字控制振荡器,它可以通过数字信号来控制频率和相位。
在通信系统、雷达系统、无线电系统等领域中,NCO被广泛应用于频率合成、数字调制解调等方面。
本文将详细介绍NCO的工作原理。
一、NCO的基本结构NCO由两个主要部分组成:数字控制器和振荡器。
其中,数字控制器负责接收输入信号,并将其转换为相应的数字控制信号,然后将这些信号传递给振荡器。
振荡器则根据这些数字控制信号产生一个特定的频率和相位的输出信号。
二、数字控制器1. 数字输入NCO通常接收一个或多个32位宽度的二进制输入数据流。
这些数据可以是任何形式的数据,如音频、视频或其他类型的数据。
2. 相位累加器相位累加器是NCO中最重要的部分之一。
它负责计算当前输出信号的相位,并根据输入数据流中每个样本所代表的相位变化量进行更新。
具体来说,在每个时钟周期内,相位累加器会将其当前值与输入数据流中下一个样本值进行加法运算,从而计算出下一个输出信号的相位。
相位累加器的初始值可以是任何值,通常设置为0。
3. 数字控制信号生成NCO的数字控制器还负责生成一系列数字控制信号,这些信号用于控制振荡器的频率和相位。
具体来说,数字控制信号可以分为以下几种类型:(1)频率控制信号频率控制信号用于调节振荡器输出信号的频率。
在每个时钟周期内,数字控制器会根据输入数据流中每个样本所代表的频率变化量来更新频率控制信号。
(2)相位调节信号相位调节信号用于调节振荡器输出信号的相位。
在每个时钟周期内,数字控制器会根据输入数据流中每个样本所代表的相位变化量来更新相位调节信号。
4. 数字控制信号传输数字控制信号需要通过某种方式传输到振荡器中。
常见的传输方式有以下两种:(1)并行传输:将所有数字控制信号同时传输到振荡器中。
(2)串行传输:将所有数字控制信号按照一定顺序依次传输到振荡器中。

CMOS 数控振荡器设计1 引言随着数字信号处理数字信号处理越来越广泛的应用,数字锁相环DPLL(Digital Phase Lock Loop)在现代集成电路设计中也越来越普遍,特别是在数字信号处理器DSP 和微处理器这类高性能数字电路应用中,数字锁相环更是一种必不可少的电路。
与传统的模拟锁相环(Analog Phase-Locked Loop)相比,由于数字锁相环较少采用高阻值电阻、电容以及电感等非线性器件,可以采用与高速数字逻辑电路相兼容的制造工艺来设计和制造,也更加容易在数字系统中应用。
一个典型的数字锁相环结构,数控数控振荡器振荡器DCO(Digital-Controlled Oscillator)是其中最关键和核心的部分。
数控振荡器DCO 输出了可变频率的振荡波形,决定了整个锁相环的噪声性能和功耗。
数字时间转换器(Time - to - DigitalConverter)输出了参考时钟和反馈来的输出时钟之间的相位差,一个数字环形滤波器(Digital LoopFilter)代替了模拟环形滤波器来控制DCO,由与参考时钟的相位差来控制DCO 输出或高或低的振荡频率,输出振荡信号由负反馈送到数字时间转换器,使相位差减小,最终让输出信号频率与参考时钟频率一致,即达到相位锁定。
整个DCO 因此不再需要含有电容或电感,同时也减少漏电流和电源噪音的问题。
图1 数字锁相环的基本结构2 电路结构和原理数控振荡器有多种实现结构,本文设计了一种完全采用静态CMOSCMOS 逻辑电路的DCO 结构,该DCO基于由CMOS 反相器构成的环形振荡器,其电路结构。
图2 电路结构图,每一级环形振荡器均是5 个CMOS反相器串联,并构成闭环负反馈回路,每个反相器的输出也与下一级环形振荡器对应的反相器输出相连。
根据巴克豪森准则:振荡器要产生振荡,那么环路增益必须大于等于一且总相移有360°。
因此环路中进行反相的次数必须是奇数,三个以上的奇数个CMOS 反相器串联闭环回路,在一个微小的激励下都能够产生振荡。

Page 1 of 12MSP430F2系列16位超低功耗单片机模块原理 第4章 Basic Clock + 基础时钟模块+版本: 1.4 日期: 2007.6.原文: TI MSP430x2xxfamily.pdf 翻译: 张超 哈尔滨理工大学 编辑: DC 微控技术论坛版主注:以下文章是翻译TI MSP430x2xxfamily.pdf 文件中的部分内容。
由于我们翻译水平有限,有整理过程中难免有所不足或错误;所以以下内容只供参考.一切以原文为准。
详情请密切留意微控技术论坛。
第四章 基础时钟模块+4.1基础时钟模块+介绍基础时钟模块+支持低系统消耗和超低功耗。
采用三种片内时钟信号,用户可以选择合适的性能和低功耗。
基础时钟模块只需接一个外部电阻、一个或两个外部晶体、或者用振荡器,通过软件控制。
基础时钟模块+有4个时钟源:LFXT1CLK:由低频时钟晶体或外接32768Hz时钟源产生的低频/高频振荡器或由标准晶体、振荡器,或外部400KH z~16M Hz的外部时钟源提供。
XT2CLK:可供选择的高频振荡器,由标准晶体、振荡器,或外部400KH z~16M Hz的外部时钟源提供。
DCOCLK:片内可数字控制的振荡器。
VLOCLK:片内超低功耗、12KH z的低频振荡器。
基础时钟模块可提供的三种时钟信号:ACLK:辅助时钟。
ACLK由软件选择来自LFXT1CLK和VLOCLK之一的时钟信号。
ACLK 经1,2,4,8分频后得到。
ACLK可由软件选作各个外围模块。
MCLK:主时钟。
MCLK由软件选择来自LFXT1CLK,VLOCLK,XT2CLK(如果片内提供),DCOCLK之一的时钟信号。
MCLK由1,2,4,8分频得到。
MCLK用于CPU和系统。
SMCLK:子系统时钟。
SMCLK由软件选择来自LFXT1CLK,VLOCLK,XT2CLK(片内提供),DCOCLK之一的时钟信号。
SMCLK由1,2,4,8分频得到。

实验五 数字振荡器实验一、实验目的本实验属于综合性实验,在项目开发中,我们经常要用产生某一频率的正弦振荡信号,比如在电话通信中,用两个不同频率的正弦信号的叠加来代表按键。
正弦信号的生成方法有三种,计算法、查表法和数字振荡器。
用计算法求正弦波的离散序列值程序设计容易,但实际应用时会占用计算时间,使系统运行速度变慢。
查表法是先通过matlab 将正弦波的序列值计算出来并寄存在存储器中,运行时只要按顺序和一定的速度取出便可。
这种方法要占用较多的存储空间,但是速度快。
第三种方法是利用数字振荡器来实现不同频率信号的叠加,这种方法通过迭代的方法计算出不同频率的正弦信号序列,结构简单,运算速度快,节省内存,因此在DSP 实际应用中我们选择这种方法。
数字振荡器的本质是,使用一个IIR (Infinite Impulse Response )滤波器,通过把它的极点放在单位圆上面来产生振荡。
利用正弦波sinx 的指数形式)(21sin jx jxe e j x --=可以得到正弦序列x(n)的Z 变换为)(21)sin(][jnwT jnwTe e j T n n x --==ϖ110011[()]()(X )2z 2jnwT jnwT n jwT n jwT nn n e e z e z e z j j ∞∞-----==⎡⎤-=-⎣⎦=∑∑() 12jwT jwT z z j z e z e -⎡⎤=-⎢⎥--⎣⎦222122cos()1jwT jwT z ze z ze j z z wT -⎡⎤--+=⎢⎥-+⎣⎦22sin()2cos()1z wT Czz z wT z Az B==-+--,此式在|z|>1时成立,且)sin(,1),cos(2wT C B wT A =-==。
根据Z 变换的基本原理和性质,序列x[n]及其Z 变换X (z )之间存在一一对应的关系,即对于给定的X (z ),可以通过反Z 变换,唯一地确定x[n]。

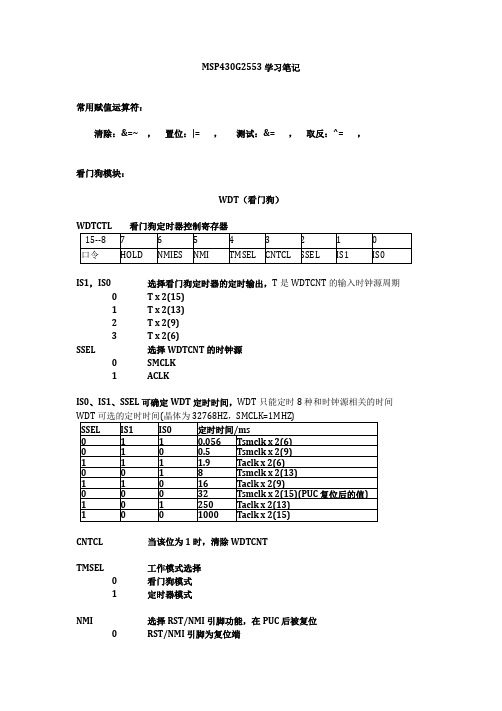
MSP430G2553学习笔记常用赋值运算符:清除:&=~ ,置位:|= ,测试:&= ,取反:^= ,看门狗模块:WDT(看门狗)WDTCTL 看门狗定时器控制寄存器15--8 7 6 5 4 3 2 1 0口令HOLD NMIES NMI TMSEL CNTCL SSEL IS1 IS0IS1,IS0 选择看门狗定时器的定时输出,T是WDTCNT的输入时钟源周期0 T x 2(15)1 T x 2(13)2 T x 2(9)3 T x 2(6)SSEL 选择WDTCNT的时钟源0 SMCLK1 ACLKIS0、IS1、SSEL可确定WDT定时时间,WDT只能定时8种和时钟源相关的时间WDT可选的定时时间(晶体为32768HZ,SMCLK=1MHZ)SSEL IS1 IS0 定时时间/ms0 1 1 0.056 Tsmclk x 2(6)0 1 0 0.5 Tsmclk x 2(9)1 1 1 1.9 Taclk x 2(6)0 0 1 8 Tsmclk x 2(13)1 1 0 16 Taclk x 2(9)0 0 0 32 Tsmclk x 2(15)(PUC复位后的值)1 0 1 250 Taclk x 2(13)1 0 0 1000 Taclk x 2(15)CNTCL当该位为1时,清除WDTCNTTMSEL 工作模式选择0 看门狗模式1 定时器模式NMI 选择RST/NMI引脚功能,在PUC后被复位0 RST/NMI引脚为复位端1 RST/NMI引脚为边沿触发的非屏蔽中断输入NMIES 选择中断的边沿触发方式0 上升沿触发NMI中断1 下降沿触发NMI中断HOLD 停止看门狗定时器工作,降低功耗0 WDT功能激活1 时钟禁止输入,计数停止WDT(看门狗)配置语句WDTCTL=WDTPW+WDTHOLD;//将WDTPW+WDTHOLD赋值给WDTCTL,关闭看门狗定时器控制寄存器(Stop watchdogtimer)IE1 |= WDTIE;//使能WDT中断WDTCTL = WDT_ADL Y_1000;//WDT 1 s / 4间隔计时器WDTCTL = WDTPW + WDTHOLD + WDTNMI + WDTNMIES;//WDTCTL 由高8位口令和低8位控制命令组成,要写入操作WDT的控制命令,出于安全原因必须先正确写入高字节看门狗口令。


dds芯片工作原理以DDS芯片工作原理为标题,我们来详细了解一下DDS芯片的工作原理。
DDS(Direct Digital Synthesis,直接数字合成)是一种数字信号处理技术,用于产生高精度的模拟信号。
DDS芯片是基于DDS技术的集成电路,可以广泛应用于通信、仪器仪表、音频设备等领域。
DDS芯片的核心是一个数字控制振荡器(Digital Control Oscillator,DCO),它通过数字信号的处理来生成一个高频时钟信号。
DDS芯片内部有一个高精度的时钟,通过控制该时钟的频率和相位,可以产生不同频率的输出信号。
DDS芯片通过一个数字控制字(Digital Control Word,DCW)来控制输出信号的频率。
DCW是一个二进制数,它决定了时钟信号的频率。
DDS芯片内部有一个相位累加器(Phase Accumulator),它根据DCW的值来累加相位,从而产生一个连续变化的相位信号。
然后,DDS芯片将相位信号与一个数字控制振荡器(Digital Control Oscillator,DCO)相乘,得到一个数字控制振荡器输出信号。
DCO是一个数字控制的振荡器,它的频率由时钟信号和相位信号共同决定。
DDS芯片内部有一个查找表(Look-Up Table,LUT),用于存储振荡器输出信号的幅值。
根据相位信号的变化,DDS芯片从查找表中读取相应的幅值,得到一个连续变化的输出信号。
DDS芯片通过一个数字模拟转换器(Digital-to-Analog Converter,DAC)将数字信号转换为模拟信号,输出到外部电路中。
DAC将DDS芯片输出的数字信号转换为相应的模拟信号,通过滤波电路进行滤波和放大,得到一个稳定且准确的模拟输出信号。
总结一下,DDS芯片通过数字信号的处理来生成高精度的模拟信号。
它通过控制时钟信号的频率和相位,利用相位累加器和数字控制振荡器来产生一个连续变化的相位信号,然后与振荡器输出信号相乘,得到一个连续变化的输出信号。

背景知识:
在实际的通信系统中,携带数字信息的信号通常是由某种类型的载波调制方式发送的,传送信号的带宽限制在以载波为中心的一个频段上,如双边带调制,或在邻近载波的频段上,如单边带调制。
无论何种调制方式,在发送端均需要一个高频载波将信息调制上去,以减小信号衰落,相干解调时在接收端也需要一个与发送端同频同相的高频载波将信息从高频上解调下来。
为了产生这个高频载波,在数字电路中是采用数控振荡器(NCO),也称为直接数字频率合成器〔DDS),它的输出频率和相位可以受人为控制,从而满足各种需要。
基本原理:
下图为NCO的工作原理框图:
数控振荡器一般由基准时钟(fclk)、相位字寄存器、相位累加器以及幅度/相位转换电路等部分组成。
在基准时钟的作用下,每一个时钟周期存贮在相位字寄存器里的值都由相位累加器进行累加,相位果加器的输出作为查找表的输人,从而得到相对应的幅度值。
根据奈奎斯特采样定律,输出信号的频率应小于基准时钟的1/2。
相位累加器输出(△Ф)的数值和系统的频率(fclk)决定了输出频率(fout),它门的关系如下:
N是相位寄存器的位数,N值的大小决定了频率分辨率(fres ),有
在这里假设,fclk=128MHz, N=32,可以计算出NCO的频率分辨率
fres=0.0298Hz
相位累加器是决定NCO电路性能的一个关键部分。
我们可以采用了Altera 的加法器宏功能模块形成一个32bit的累加器,它以流水线处理方式进行工作。
相位/幅度转换电路是NCO电路中的另一个关键部分,在设计中面临的主要问题就是资源的开销。
一般电路采用ROM结构,相位累加器的输出是一种数字式锯齿波,通过取它的若干位作为ROM的地址输人,而后通过查表和运算,ROM就能输出所需波形的量化数据。
在APEX器件中,ROM由EAB实现,ROM表的尺寸随着地址位数或数据位数的增加成指数递增关系,因此在满足信号性能的前提条件下,如何减少资源的开销就是一个重要的问题。
在实际设计时,要充分利用信号周期内的对称性和算术关系来减少EAB的开销。
上图为产生正弦信号的相位/幅度转换电路,相位累加器累加值的最高位(MSB )和次最高位(MSB-1)的组合作为象限确定模块的输人,由此来确定输出信号所在的相平面和极性符号,如表所示。
正弦查找表存贮了1/4周期的正弦幅度数据,通过象限确定模块就可以完成完整的正弦波的形成。
这里采用了一个256 x 8的ROM宏模块。
地址线和数据线输出均为8bit, 8bit地址分别对应相位累加器的30-23bit的输出数据。
正弦查找表的输出是无符号的8bit数据,并不能代表正弦波形。
求补模块根据象限确定模块的输出符号位的极性来对查找表输出数据进行求补,并把此符号位和正弦查找表输出的高7bit组合作为最终正弦波输出信号。