第七章 汽车的通过性
- 格式:doc
- 大小:299.50 KB
- 文档页数:15

学习目标通过本章的学习,应熟练掌握汽车通过性的评价指标及表征通过性的几何参数的含义;了解汽车通过性的影响因素;掌握计算各类型汽车越过台阶和壕沟的能力的方法。
7.1节 汽车通过性评价指标及几何参数7.1.1 汽车通过性概述汽车的通过性是指汽车在一定载重量下能以足够高的平均车速,通过各种坏路和无路地带(如松软的土壤、沙漠、雪地、沼泽及坎坷不平地段以及克服各种障碍陡坡;侧坡、台阶、壕沟等)的能力。
汽车的通过性可分为轮廓通过性和牵引支承通过性。
前者是表征车辆通过坎坷不平路段和障碍的能力;后者是指车辆顺利通过松软土壤、沙漠、雪地、冰面、沼泽等地面的能力。
山区、矿区、建设工地等使用的车辆和军用车辆,经常行驶在坏路和无路地面上。
因此,要求这些汽车应具有良好的通过性。
7.1.2 汽车的间隙失效由于汽车与越野地面间的间隙不足而被地面托住、无法通过的情况,称为间隙失效。
当车辆中间底部的零部件碰到地面而被封住时,称为“顶起失效”;当车辆前端或尾部触及地面而不能通过时,则分别称为“触头失效” 或“托尾失效”。
后两种情况属于同一类失效。
7.1.3 汽车通过性几何参数与间隙失效有关的汽车整车几何参数,称为汽车的通过性几何参数。
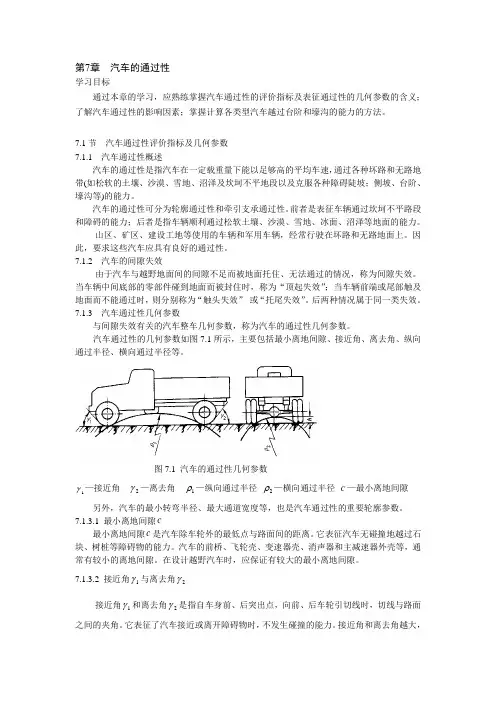
汽车通过性的几何参数如图7.1所示,主要包括最小离地间隙、接近角、离去角、纵向通过半径、横向通过半径等。
图7.1 汽车的通过性几何参数1γ—接近角2γ—离去角 1ρ—纵向通过半径 2ρ—横向通过半径 c —最小离地间隙另外,汽车的最小转弯半径、最大通道宽度等,也是汽车通过性的重要轮廓参数。
7.1.3.1 最小离地间隙c最小离地间隙c 是汽车除车轮外的最低点与路面间的距离。
它表征汽车无碰撞地越过石块、树桩等障碍物的能力。
汽车的前桥、飞轮壳、变速器壳、消声器和主减速器外壳等,通常有较小的离地间隙。
在设计越野汽车时,应保证有较大的最小离地间隙。
7.1.3.2 接近角1γ与离去角2γ接近角1γ和离去角2γ是指自车身前、后突出点,向前、后车轮引切线时,切线与路面之间的夹角。

第7章汽车的通过性一、判断题(只判断正确与错误,在正确的小题后括号内画“T”,在错误的小题后括号内画“F”)1、接近角和离去角表示汽车的横向通过能力。
()2、最小离地间隙表示汽车无碰撞地越过小丘和拱桥的能力。
()3、最小离地间隙不足,纵向和横向通过半径大,都容易引起“顶起失效”。
()二、填空题1、根据地面对汽车通过性影响的原因,汽车的通过性分为和。
2、常采用、及燃油利用指数三项指标来评价汽车的支承通过性。
3、汽车的通过性主要取决于地面的及汽车的。
4、常见的汽车通过性几何参数有、、、和最小转弯直径。
5、间隙失效可分为顶起失效、和。
三、名词解释1、汽车的通过性2、牵引系数3、牵引效率4、燃油利用指数5、间隙失效6、顶起失效7、触头失效8、托尾失效9、最小离地间隙10、接近角11、离去角12、最小转弯直径四、问答与分析论述题1、汽车通过性的几何参数主要有哪些?并解释定义?2、从使用角度讲,影响汽车通过性的主要因素有哪些?五、计算题1、当汽车在侧向坡度角为5度,曲率半径为75m、路面附着系数为0.7的弯道上行驶时,试计算汽车不发生侧滑时的所允许的最高行驶速度。
若侧向坡度角为0度时,最高行驶速度为多少?2、 某小客车轮距为1.6m ,重心高为0.49m ,试确定该车在曲率半径为25m 的水平弯道上行驶不发生侧翻所允许的最大车速。
3、 某汽车正常装载的重心位置m L m a 4,3==,重心高度为1.1m ,该车头档最大爬坡度%30=i ,问是否存在纵向翻车的可能性?若重心前后位置不变,问重心高度为多大时存在纵翻的可能性?(不考虑位移问题)4、 某汽车的轮距m B 6.1=,重心高度为0.6m ,该车在附着系数为0.7的水平路面上行驶,是否会因高速转弯而发生侧翻?。
第六章汽车制动性 - 第七章汽车通过性一、名词解释1.汽车的行驶平顺性:保持汽车行驶过程中乘员所处的振动环境具有一定舒适程度,并保持货物完好无损的性能。
2.轴加权系数:对不同方向振动,人体敏感度不一样,用轴加权系数描述这种敏感度。
3.频率加权系数:对不同频率的振动,人体敏感度也不一样,用频率加权函数w(f) 描述这种敏感度。
4.路面不平度函数:路面相对基准平面的高度,沿道路走向长度的变化称为路面不平度函数。
5.汽车的通过性:指汽车能以足够高的平均车速通过各种坏路和无路地带(如松软地面、凹凸不平地面等)及各种障碍(如陡坡、侧坡、壕沟、台阶、灌木丛、水障等)的能力。
6.牵引系数TC:单位车重的挂钩牵引力。
7.牵引效率TE:驱动轮输出功率与输入功率之比。
8.燃油利用指数E f:单位燃油消耗所输出的功。
9.间隙失效:由于汽车与地面间的间隙不足而被地面拖住,无法通过的现象。
10.顶起失效:当车辆中间底部的零件碰到地面而被顶住时。
11.触头失效 : 当车辆前端触及地面不能通过时。
12.托尾失效:当车辆尾部触及地面不能通过时。
13.最小离地间隙:汽车满载,静止时,支承平面与汽车上的中间区域(0.8b范围内)最低点之间的距离。
14.接近角:汽车满载,静止时,前端突出点向前轮所引切线与地面间的夹角。
15.离去角:汽车满载,静止时,后端突出点向后轮所引切线与地面间的夹角。
16.最小转弯直径:当转向盘转到极限位置,汽车以最低稳定车速转向行驶时,外侧转向轮的中心平面在支承平面上滚过的轨迹圆直径。
二、填空1、汽车平顺性有两种评价方法:一是根据乘员舒适程度评价,二是根据汽车振动系统及其评价指标评价2、根据地面对汽车通过性影响的原因,汽车的通过性分为支承通过性和几何通过性。
3、影响汽车通过性的主要因素有:汽车的支承-牵引参数和几何参数;也与汽车的其它使用性能,如动力性、平顺性、机动性、稳定性及视野性有关。
4、汽车的通过性主要取决于地面的物理性质及汽车的结构参数和几何参数。

第七章 汽车通过性
第一节 概述
汽车通过性是指汽车以足够高的平均速度通过各种坏路和无路(如松软土壤、沙漠、雪地、沼泽等松软地面及坎坷不平地段)地带及各种障碍(如陡坡、侧坡、壕沟、台阶、灌木丛、水障)的能力。
通过性影响因素主要有汽车的支承-牵引参数和几何参数。
这些参数也影响汽车其他使用性能,如汽车动力性、汽车平顺性、汽车操纵稳定性、汽车机动性及驾驶员视野性。
在松软地面上行驶时,汽车驱动轮对地面施加向后的水平力,使地面发生剪切变形,相应的剪切变形所构成的地面水平反作用力,被称为土壤推力。
它比一般硬路面上的附着力要小。
汽车在松软地面上行驶时也受到土壤阻力的作用。
土壤阻力,是指因轮胎对土壤的压实作用、推移作用而产生的压实阻力、推土阻力,以及充气轮胎变形引起的弹滞损耗阻力。
它要比硬路面上的滚动阻力大。
因此,它们经常不能满足汽车行驶附着条件的要求,这是松软地面限制汽车行驶的主要原因。
牵引车的挂钩牵引力等于土壤最大推力与土壤阻力之差。
它用于表征土壤强
度的贮备能力,也反映了汽车通过无路地带的能力。
挂钩牵引力可用于车辆加速上坡、克服道路不平的阻力和牵引挂车等装备。
农林区、矿区、工地等使用的车辆和军用车辆经常行驶在坏路和无路地面上这些汽车应具有良好的通过性。
汽车的通过性相关知识(doc 15页)第七章汽车的通过性摘要汽车的通过性(越野性)是指汽车能以足够高的平均车速通过各种不良道路、无路地带和克服各种障碍的能力。
本章对学习汽车的通过性意义进行概括性论述,讨论汽车的地面通过性、汽车的几何通过性的相关参数、分析汽车越过台阶、壕沟的能力,在此基础上分析各种因素对汽车通过性的影响,最后通过一些实例计算来说明以上所述理论内容的具体应用。
引言汽车是一种常用的、高效率的交通运输工具,不同用途的汽车对通过性的要求也不同,用户应根据自己特定的用途选择具有合适通过性的汽车。
高级轿车和公共汽车主要在城市行驶,由于路面条件甚好,所以对汽车通过性的要求不突出。
农林区、矿区、建设工地等使用的车辆和军用车辆,经常行驶在坏路和无路地面上。
因此,要求这些汽车应具有良好的通过性。
汽车的通过性主要决定于汽车的驱动力、附牵引性系数Ⅱ用下式表示:Ⅱ==式中 为在松软土壤上行驶时的土壤阻力。
牵引性系数Ⅱ反映了汽车加速、爬坡、克服道路不平的阻力和牵引挂车或武器装备的能 力。
牵引性系数越大,通过性越好。
二、土壤的可通过性土壤的可通过性是土壤支承车辆通过的能力。
美国学者贝克(Bekker)通过大量研究后建 议,用在均布压力g 作用下每单位承载面积的土壤所能产生的净推力来衡量,即⎰-+=z qd Lqtg C 1)(φτ (7—1)式中 C ——土壤内聚力系数;φ——土壤的内摩擦角,tg φ为内摩擦系数;q ——土壤单位面积压力;L ——接触面积长度;z ——下陷量(或称变形量)。
由式(7—1)可绘制出一般土壤的可通过性曲线,如图7—1(a)所示。
对于不同类型的土壤,C,φ值不同即有不同的可通过性曲线。
对于干砂土,C≈0,可通过曲线从坐标原点开始,见图7—1(b);对于塑料性饱和粘土,φ≈0,可通过曲线在与纵轴交点处的切线几乎是水平的,见图7—1(c)。
可通过性曲线简单面直观地表示了土壤的可通过性及提高通过性的方法。
第七章汽车的通过性摘要汽车的通过性(越野性)是指汽车能以足够高的平均车速通过各种不良道路、无路地带和克服各种障碍的能力。
本章首先对学习汽车的通过性意义进行概括性论述,然后具体讨论汽车的地面通过性、汽车的几何通过性的相关参数、分析汽车越过台阶、壕沟的能力,在此基础上分析各种因素对汽车通过性的影响,最后通过一些实例计算来说明以上所述理论内容的具体应用。
引言汽车是一种常用的、高效率的交通运输工具,不同用途的汽车对通过性的要求也不同,用户应根据自己特定的用途选择具有合适通过性的汽车。
高级轿车和公共汽车主要在城市行驶,由于路面条件甚好,所以对汽车通过性的要求不突出。
农林区、矿区、建设工地等使用的车辆和军用车辆,经常行驶在坏路和无路地面上。
因此,要求这些汽车应具有良好的通过性。
汽车通过性,是指汽车在一定载质量条件下能以足够高的平均车速通过各种坏路及无路地带和克服各种障碍的能力。
坏路及无路地带,是指松软土壤、沙漠、雪地、沼泽等松软地面及坎坷不平地段;各种障碍,是指陡坡、侧坡、台阶、壕沟等。
汽车通过性可分为轮廓通过性和牵引支承通过性。
前者是表征车辆通过坎坷不平路段和障碍(如陡坡、侧坡、台阶、壕沟等)的能力;后者是指车辆能顺利通过松软土壤、沙漠、雪地、冰面、沼泽等地面的能力。
汽车在松软地面上行驶时,驱动轮对地面施加向后的水平力,使地面发生剪切变形,相应的剪切变形所构成的地面水平反作用力,被称为土壤推力。
它常比在一般硬路面下的附着力要小得多。
汽车在松软地面上行驶时也受到土壤阻力的作用。
土壤阻力,是指轮胎对土壤的压实作用、推移作用而产生的压实阻力、推土阻力,以及充气轮胎变形引起的弹滞损耗阻力。
它要比在一般硬路面上的滚动阻力大得多。
因此,它们经常不能满足汽车行驶附着条件的要求,这是松软地面限制汽车行驶的主要原因。
牵引车的挂钩牵引力等于土壤最大推力与土壤阻力之差。
它表征了土壤强度的储备能力,它可用于车辆加速、上坡、克服道路不平的阻力和牵引与挂钩连接的挂车等装备,它也反映了汽车通过无路地带的能力。
汽车的通过性主要决定于汽车的驱动力、附着力等牵引参数和几何参数,也与汽车的平顺性、机动性、视野等性能密切相关。
本章首先从地面通过性的评价指标和土壤的可通过性两方面分析汽车的地面通过性。
然后具体介绍了汽车的几何通过性参数和汽车越过台阶、壕沟的能力。
在此基础上,从汽车结构、车轮和驾驶技术三个方面讨论了影响汽车通过性的因素。
最后介绍了测定和比较汽车的通过性能的试验。
第一节汽车的地面通过性汽车的地面通过性是指汽车在松软地面上的行驶能力。
一、地面通过性的评价指标汽车在松软地面上能否行驶取决于汽车行驶的驱动与附着条件,但满足该条件只是说明了能否正常行驶,还不能说明能力的大小。
评价汽车行驶能力的大小,通常用牵引性系数等 指标。
牵引力T F 对汽车总重力之比称为牵引性系数。
牵引性系数Ⅱ用下式表示:Ⅱ=GF T =G F F r q - 式中 r F 为在松软土壤上行驶时的土壤阻力。
牵引性系数Ⅱ反映了汽车加速、爬坡、克服道路不平的阻力和牵引挂车或武器装备的能 力。
牵引性系数越大,通过性越好。
二、土壤的可通过性土壤的可通过性是土壤支承车辆通过的能力。
美国学者贝克(Bekker)通过大量研究后建 议,用在均布压力g 作用下每单位承载面积的土壤所能产生的净推力τ来衡量,即⎰-+=z qd Lqtg C 1)(φτ (7—1) 式中 C ——土壤内聚力系数; φ——土壤的内摩擦角,tg φ为内摩擦系数;q ——土壤单位面积压力;L ——接触面积长度;z ——下陷量(或称变形量)。
由式(7—1)可绘制出一般土壤的可通过性曲线,如图7—1(a)所示。
对于不同类型的土 壤,应C , φ值不同即有不同的可通过性曲线。
对于干砂土,C ≈0,可通过曲线从坐标原点开始,见图7—1(b);对于塑料性饱和粘土,φ≈0,可通过曲线在与纵轴交点处的切线几乎是水平的,见图7—1(c)。
可通过性曲线简单面直观地表示了土壤的可通过性及提高通过性的方法。
从图中可见, 在带有摩擦性的土壤上,适当地增加汽车的接地比压,对提高通过性有利;而在纯粘性土壤上,则应减小接地比压,以利于提高汽车的通过性。
第二节汽车的几何通过性汽车的几何通过性是指汽车克服几何障碍而正常工作的能力。
一、通过性的几何参数因汽车与地面间的间隙不足而被地面障碍物托住无法通过的情况,称为间隙失效。
当车辆中间底部的零部件碰到地面障碍而被顶住时,称为“顶起失效”;当车辆前端或尾部触及地面障碍而不能通过时,则分别称为“触头失效”或“托尾失效”。
与间隙失效有关的汽车整车几何参数,称为汽车的通过性几何参数。
例如最小离地间隙、 纵向通过半径、横向通过半径、接近角、离去角等,如图7—2所示。
1.最小离地间隙m in h最小离地间隙是指汽车除车轮外的最低点与地面间的距离。
它表示汽车无碰撞地超过石 块、树桩之类障碍物的能力。
汽车的最低点多半在后桥的主减速器外壳、飞轮壳、变速器壳、消声器、前桥的下边缘处。
由于后桥主减速器齿轮外径较大.一般后桥壳的离地间隙最小。
2.纵向通过半径1ρ和横向通过半径2ρ纵向通过半径1ρ是在汽车侧视图上作出的与前、后车轮及两轮间最低点相切的圆的半 径。
横向通过半径2ρ是在汽车正视图上所作出的与左、右轮及两轮中间轮廓相切的圆的半 径。
它们表示汽车无碰撞地通过小丘、拱桥及凸起路面等障碍物的能力。
1ρ,2ρ愈小,则汽车的通过性愈好。
亦可用纵向通过角来评价汽车的几何通过性。
3.接近角1γ与离去角2γ汽车的接近角是指切于前轮轮胎外缘且垂直于车辆纵向对称平面的平面与车辆支承平面之间所夹的最大锐角,前轴前方任何固定在车辆上的部件均在此平面的上方。
汽车的离去角是指切于后轮轮胎外缘且垂直于车辆纵向对称平面的平面与车辆支承平面之间所夹的最大锐角.位于后轴后方的任何固定在车辆上的部件均在此平面上方。
汽车的接近角与离去角表示汽车接近或离开障碍物或陡坡时不发生碰挂的可能性。
汽车的最小离地间隙、纵向通过半径、接近角和离去角等通过性几何参数,主要由汽车的类型和使用条件而定,其一般范围见表7—1。
4.最小转弯直径min s d 和内轮差d ∆如图7—3所示,转向过程中当转向盘向左和向右转到极限位置时,车辆外转向轮印迹中在车辆支承平面上的轨迹圆直径中的较大者称为最小转弯直径min s d 。
它表示车辆在最小面积内的回转能力和通过狭窄弯曲地带或绕过障碍物的能力。
前转向轴和末轴的内轮印迹中心在车辆支承平面上的轨迹圆直径之差称为内轮差d 机动车运行安全技术条件国标(GB7258—1997)规定:机动车的最小转弯直径,以前外轮轨迹中心为基线测量其值不得大于24m。
当转弯直径为24m时.内轮差不得大于3.5m。
二、汽车越过台阶、壕沟的能力汽车在行驶中常常要克服台阶、壕沟等障碍。
由于此时车速很低,故可用解静力学平衡方程来求得汽车越障能力与其参数间的关系。
图7—4是后轮驱动的四轮汽车越过硬地面上的台阶时的受力情况。
由图7—4(a)可知,前轮(从动轮)碰到台阶时有下列平衡方程式⎪⎪⎩⎪⎪⎨⎧=--+=--+=-+0220cos sin 0sin cos 221121211D F Ga L F D fF G fF F F F fF F ϕααϕαα式中 G ——汽车总重力;1F ——台阶作用于前(从动)轮的反作用力;2F ——后轴负荷;ϕ——附着系数;f ——滚动阻力系数。
将上列方程中的G ,1F ,2F 消去。
可得如下无因次方程式 L D f L D L a f L D f f L a f 21cos 2111sin 21=⎪⎪⎭⎫ ⎝⎛----⎪⎪⎭⎫ ⎝⎛+-+αϕϕϕαϕϕϕ 由图7—4中的几何关系可知sin α=Dh D h D w w 215.05.0-=- 代人上式并设硬路面上的f ≈0,得到⎪⎪⎪⎭⎪⎪⎪⎬⎫⎪⎪⎪⎩⎪⎪⎪⎨⎧⎥⎦⎤⎢⎣⎡--+-=⎪⎭⎫ ⎝⎛221)2(111121L D L a L a D h w ϕϕ (7—2) 式中 1⎪⎭⎫ ⎝⎛D h w ——前轮单位车轮直径可克服的台阶高,它表示汽车前轮越过台阶的能力。
由上式可知,D L 愈小及L a 愈大,就愈大,1⎪⎭⎫ ⎝⎛D h w 就愈大,即汽车的前轮也愈容易越过较高的台阶。
当后轮(驱动轮)碰到台阶时(图7—4b),其平衡方程式为⎪⎪⎩⎪⎪⎨⎧=--+=-++=-+0220cos sin 0sin cos 112221221D fF Gb L F D F G F F F F F fF ϕαϕααϕα式中 1F ——前轴负荷;2F ——台阶作用于后(驱动)轮的反作用力。
将Dh w 21sin -=α及0=f 代人上式,可解得 ⎪⎪⎭⎫ ⎝⎛+-=⎪⎭⎫ ⎝⎛2211121αD h w 式中 2⎪⎭⎫ ⎝⎛D h w ,——后驱动轮单位车轮直径可克服的台阶高,它表示汽车后轮越过台阶的能力。
由上式可见,后轮越过台阶的能力与汽车参数无关,且由于通过a >b ,比较式(7—2)和(7—3)可知,后轮是限制汽车越过台阶的主要因素。
同理可得4x 4汽车在硬地面上越过台阶时的受力情况;经分析计算后可知,1⎪⎭⎫ ⎝⎛D h w 是随D L 的增加而降低的;增加La 的比值时,可以使4x 4汽车前轮越过台阶的能力显著提高,甚至可使车轮越过高度大于其半径的台阶。
对后轮来说,La 比值的影响正好与4x 4汽车前轮越过台阶的情况相反。
长轴距、前轴负荷大的汽车(即La 较小),其后轮越过台阶的能力要比前轮大。
较大的D L 比值时,无论汽车的总质量如何在轴间分配,后轮的越障能力总会得到改善。
总的说来,4x 2汽车的越障能力要比4x 4汽车差得多,后轮驱动的4x 2汽车的越障能力比4x 4汽车约降低一半。
汽车越过壕沟的情形如图7—5所示,可以看出,它与越过台阶时情况相似,因此汽车跨越壕沟的性能也和越过台阶的情况一样,可以用壕沟宽度d l 与车轮直径D 之比⎪⎭⎫ ⎝⎛D l d 来评价。
D l d 与D h w 之间的换算关系为Dl d =22⎪⎭⎫ ⎝⎛-D h D h w w 因此,只要求出汽车越过垂直障碍的能力Dh w ,即可由上式确定越过壕沟的宽度与车轮直径的比值Dl d ,从而求得能跨越的壕沟宽度。
第三节 影响汽车通过性的因素汽车的通过性与汽车的结构及使用条件有关。
一、汽车结构为了保证汽车的通过性,除了要减小行驶阻力外,还必须提高汽车的驱动力和附着力,可采用副变速器或分动器、液力传动、高摩擦式差速器和驱动防滑系统等来实现。
1.副变速器和分动器如第一章所述,降低行驶车速,可以提高附着系数。
用低速去克服困难地段,可以改善通过性。
在高通过性汽车的传动系中增设副变速器或使分动器具有低档,以增加传动系总传 动比,使汽车能在极低的速度下稳定行驶,以获得足够大的驱动力。