零点标定操作流程
- 格式:doc
- 大小:1.93 MB
- 文档页数:3
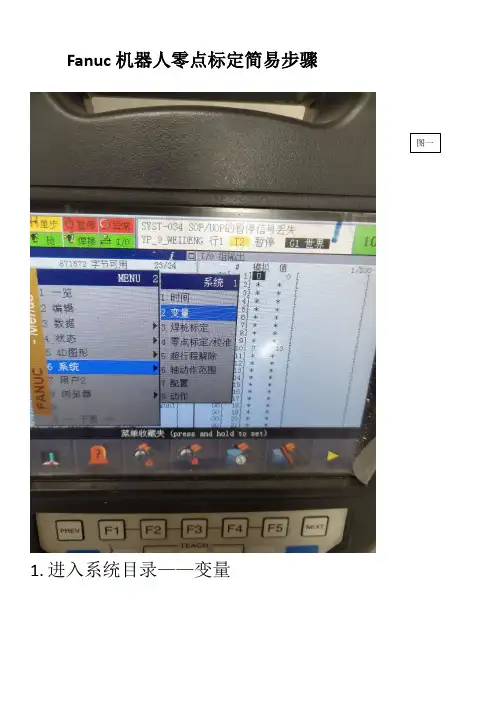
Fanuc机器人零点标定简易步骤
图一1.进入系统目录——变量
图二
2.(找到338行或者401行)MASTER ENB 后面的数字改写成1
3.点开F1。
找到系统零点标定/校准,如下图
图三
4.点一下F3 RES-PCA 用于暂时活动零点丢失的轴组
5.点一下FCTN 找到重新启动设备,冷启动。
6.待设备启动后,哪一个轴组有问题,就单独调至到关节运动,活动下该轴组,调整对准机械外零点刻度标尺位置。
图四
7接着示教器面板右上角调至你要标定的轴组,关节模式。
按照如上的步骤进入系统零点标定/校准这一画面。
8. 例如,G2轴组有问题,我们直接在第一排J1处第三个(SEL ),输入1(修改需要按住动作可能输入1) 然后再按一下F5执行。
7
8
图五
图六9
9.再点一下该图第七项7.跟新零点标定结果。
10.完成上续步骤就是简单标定的了一个G2组。
11.再次进入标定页面,点一下FCTN 找到重新启动设备,对设备进行一次冷启动。
注意!
如果在标定中出现以下黄色提示标签,(见图七)
无法执行零点标定!
由于重力补偿已启用,必须立即
所有需要零点标定的机器人轴
进行零点标定。
此时退出2全轴零点位置标定,选择进入4 简易零点标定(单轴)(见图八)
图七
图八。
第三章仪表标定一、通用标定方法开机初始化过程中长按【#】键直到笔画自检结束,仪表即进入标定状态,显示【d X 】.按照以下步骤逐步操作,1、分度值设置:显示 【d X 】 按【除皮】键选择1、2、5、10、20、50,按【#】键确认,自动进入下一参数的设置。
按【除皮】键自动步进循环显示。
显示 【d X 】显示 【d 1 】显示 【d 2 】显示 【d 5 】显示 【d 10 】显示 【d 20 】显示 【d 50 】显示 【d 1 】例如在显示【d 5】时,按【#】键,分度值即设置为5,并自动进入小数点设置状态。
2、小数点设置:显示 【P X】 按【除皮】键选择0、1、2、3位小数,按【#】键确认,自动进入下一个参数的设置。
按【除皮】键自动步进循环显示。
显示 【P 0】显示 【P 0.0】显示 【P 0.00】显示 【P 0.000】显示 【P 0】例如在显示【P 0.000】时,按【#】键,小数点即设置为0.000,并自动进入最大秤量设置状态。
3、最大秤量设置:显示 【FULL 】 按【除皮】键进入数字输入状态。
显示 【0 0 0 0 0 0】 按【除皮】键,标志符▼依次右移选择数字输入位置,按【置零】键对应位自动步进加一,直到所需数字出现,再按【除皮】键标志符▼依次右移选择数字输入位置,按【置零】键对应位自动步进加一,直到最大秤量值出现,按【#】键确认,自动进入下一个参数的设置。
例如显示【0 2 5 0 0 0】 按【#】键确认,并自动进入零点标定状态。
4、零点标定:显示 【nOLOAD】 秤台上无物,等到稳定标志符▼出现,按【#】键,零点标定完成,进入量程标定状态。
5、满量程标定:显示 【AdLOAD】 在秤台上放置砝码,按【除皮】键进入输入状态。
显示 【0 0 0 0 0 0 】 按【除皮】键,标志符▼依次右移选择数字输入位置,按【置零】键对应位自动步进加一,直到所需数字出现,再按【除皮】键标志符▼依次右移选择数字输入位置,按【置零】键对应位自动步进加一,直到所显示的数字和砝码重量相等,当稳定标志符▼出现时,按【#】键确认,结束量程标定状态。
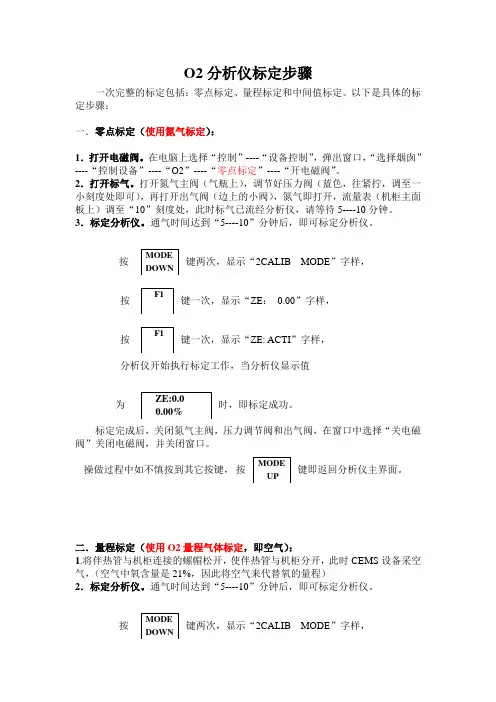
O2分析仪标定步骤一次完整的标定包括:零点标定、量程标定和中间值标定。
以下是具体的标定步骤:一.零点标定(使用氮气标定):1.打开电磁阀。
在电脑上选择“控制”----“设备控制”,弹出窗口,“选择烟囱”----“控制设备”----“O2”----“零点标定”----“开电磁阀”。
2.打开标气。
打开氮气主阀(气瓶上),调节好压力阀(蓝色,往紧拧,调至一小刻度处即可),再打开出气阀(边上的小阀),氮气即打开,流量表(机柜主面板上)调至“10”刻度处,此时标气已流经分析仪,请等待5----10分钟。
3.标定分析仪。
通气时间达到“5----10”分钟后,即可标定分析仪。
按键两次,显示“2CALIB MODE ”字样,按键一次,显示“ZE : 0.00”字样,按键一次,显示“ZE: ACTI ”字样,分析仪开始执行标定工作,当分析仪显示值为时,即标定成功。
标定完成后,关闭氮气主阀,压力调节阀和出气阀,在窗口中选择“关电磁阀”关闭电磁阀,并关闭窗口。
操做过程中如不慎按到其它按键, 按 键即返回分析仪主界面。
二.量程标定(使用O2量程气体标定,即空气):1.将伴热管与机柜连接的螺帽松开,使伴热管与机柜分开,此时CEMS 设备采空气,(空气中氧含量是21%,因此将空气来代替氧的量程)2.标定分析仪。
通气时间达到“5----10”分钟后,即可标定分析仪。
按 键两次,显示“2CALIB MODE ”字样,按键一次,显示“ZE : 0.00”字样,按键一次,显示“SP :21.00”字样,按键一次,显示“SP: ACTI ”字样,为时,即标定成功。
标定完成后,将伴热管接回原处即可。
操做过程中如不慎按到其它按键, 按 键即返回分析仪主界面。
三.中间值标定(使用O2中间值气体标定,即低浓度标气,12%):1.打开电磁阀。
在电脑上选择“控制”----“设备控制”,弹出窗口,“选择烟囱”----“控制设备”----“O2”----“量程标定”----“开电磁阀”。
sr2030气体分析仪零点标定过程
SR2030气体分析仪的零点标定过程如下:
1. 开机并打开仪器,将其保持在常温下一段时间。
2. 安装零气源并连接到分析仪中。
3. 在菜单中选择“零点标定”,然后在系统提示下选择所需的气体类型。
4. 打开零气源并且设置零气流量。
5. 等待一段时间直到测量稳定(通常需要5-10分钟)。
6. 点击“确定”来保存零点标定值。
7. 将零气源关闭并移除。
8. 可以通过空气进行验证,确保零点标定成功。
需要注意的是,在零点标定过程中,应当确保仪器和零气源稳定,并避免使用已过期或已污染的气体。
另外,在完成零点标定后,还应当进行定期的校准以确保分析结果的准确性。
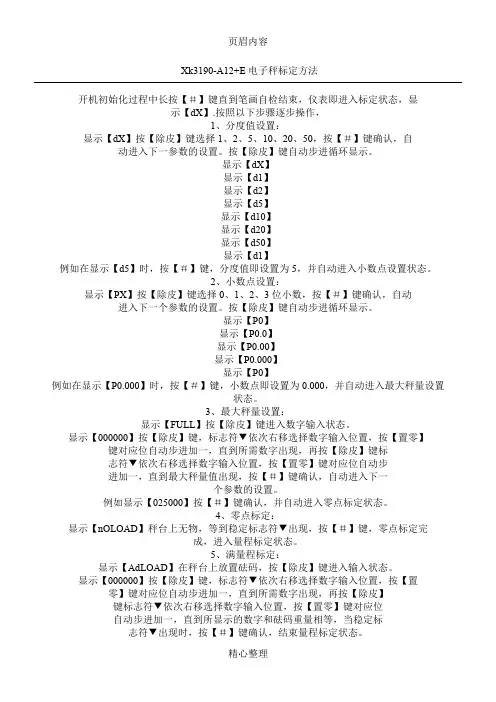
Xk3190-A12+E电子秤标定方法
开机初始化过程中长按【#】键直到笔画自检结束,仪表即进入标定状态,显
示【dX】.按照以下步骤逐步操作,
1、分度值设置:
显示【dX】按【除皮】键选择1、2、5、10、20、50,按【#】键确认,自动进入下一参数的设置。
按【除皮】键自动步进循环显示。
显示【dX】
显示【d1】
4、零点标定:
显示【nOLOAD】秤台上无物,等到稳定标志符▼出现,按【#】键,零点标定完
成,进入量程标定状态。
5、满量程标定:
显示【AdLOAD】在秤台上放置砝码,按【除皮】键进入输入状态。
显示【000000】按【除皮】键,标志符▼依次右移选择数字输入位置,按【置零】键对应位自动步进加一,直到所需数字出现,再按【除皮】
键标志符▼依次右移选择数字输入位置,按【置零】键对应位
自动步进加一,直到所显示的数字和砝码重量相等,当稳定标
志符▼出现时,按【#】键确认,结束量程标定状态。
显示【End】
6、轻触仪表后侧的标定开关按钮键,仪表将保存参数,返回到称重状态。
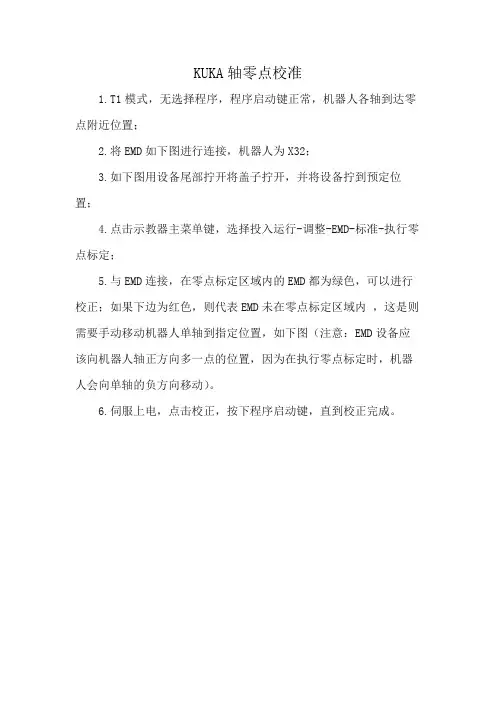
KUKA轴零点校准
1.T1模式,无选择程序,程序启动键正常,机器人各轴到达零点附近位置;
2.将EMD如下图进行连接,机器人为X32;
3.如下图用设备尾部拧开将盖子拧开,并将设备拧到预定位置;
4.点击示教器主菜单键,选择投入运行-调整-EMD-标准-执行零点标定;
5.与EMD连接,在零点标定区域内的EMD都为绿色,可以进行校正;如果下边为红色,则代表EMD未在零点标定区域内,这是则需要手动移动机器人单轴到指定位置,如下图(注意:EMD设备应该向机器人轴正方向多一点的位置,因为在执行零点标定时,机器人会向单轴的负方向移动)。
6.伺服上电,点击校正,按下程序启动键,直到校正完成。
库卡机器人的零点标定方法及步骤【知识专栏】库卡机器人的零点标定方法及步骤在工业自动化领域中,库卡机器人被广泛应用于各种生产线上,其高效、精准和灵活的特性受到了众多企业的青睐。
而在库卡机器人的使用过程中,零点标定是一个非常重要的环节,它直接影响着机器人的定位精度和工作效率。
本文将针对库卡机器人的零点标定方法及步骤进行深入探讨,并提供相应的个人观点和理解。
一、库卡机器人的零点标定概述零点标定是指确定机器人工作空间坐标系原点的过程,通过对机器人各关节进行坐标轴的校准,使得机器人能够准确地定位和执行任务。
对于库卡机器人来说,零点标定是其正常运行的基础,其准确性和可靠性对机器人的工作效率和精度至关重要。
二、库卡机器人的零点标定方法1. 机械标定:通过对机器人的机械结构进行校准,确定各关节的零点位置。
2. 软件标定:利用库卡机器人的控制软件进行坐标系的校准和调整。
3. 视觉标定:通过视觉系统对机器人进行实时监测和校准,实现精准的零点标定。
三、库卡机器人的零点标定步骤1. 准备工作:确认机器人处于停止状态,确保工作环境安全、整洁。
2. 机械标定:通过操纵机器人手动调整各关节,使其处于预设的零点位置,完成机械标定。
3. 软件标定:在控制软件中进入零点标定界面,按照提示进行坐标系校准和调整。
4. 视觉标定:如需使用视觉系统进行标定,则在此步骤进行相应操作,确保视觉系统的准确性和稳定性。
5. 检测验证:完成标定后,进行相关的检测验证工作,确保零点标定的准确性和可靠性。
四、个人观点和理解库卡机器人的零点标定是其正常运行的基础环节,对于保障机器人的定位精度和工作效率具有重要意义。
在实际操作中,应结合机器人的具体情况和工作需求,选择合适的零点标定方法及步骤,并严格按照操作规程进行操作,以确保标定的准确性和可靠性。
定期对机器人进行定位精度的检测和验证工作,及时发现并纠正问题,以保障机器人的正常运行。
总结回顾通过本文对库卡机器人的零点标定方法及步骤进行了全面的探讨,我们了解到零点标定是库卡机器人正常运行的基础,其准确性和可靠性对机器人的工作效率和精度至关重要。
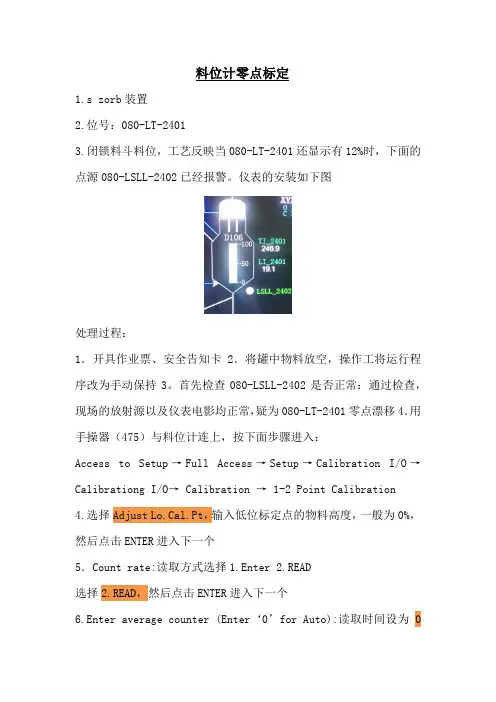
料位计零点标定
1.szorb装置
2.位号:080-LT-2401
3.闭锁料斗料位,工艺反映当080-LT-2401还显示有12%时,下面的点源080-LSLL-2402已经报警。
仪表的安装如下图
处理过程:
1.开具作业票、安全告知卡2.将罐中物料放空,操作工将运行程序改为手动保持3。
首先检查080-LSLL-2402是否正常:通过检查,现场的放射源以及仪表电影均正常,疑为080-LT-2401零点漂移4.用手操器(475)与料位计连上,按下面步骤进入:
Accessto Setup→Full Access→Setup→Calibration I/O→Calibrationg I/O→ Calibration → 1-2 Point Calibration 4.选择Adjust Lo.Cal.Pt,输入低位标定点的物料高度,一般为0%,然后点击ENTER进入下一个
5.Count rate:读取方式选择1.Enter 2.READ
选择2.READ,然后点击ENTER进入下一个
6.Enter average counter (Enter‘0’for Auto):读取时间设为0
表示自动确认,然后点击ENTER进入
7.数据读取过程中:整个读取过程大约需要30s,画面如下显示
act cps av=7758
Count=30→直至=0
8.Set conut rate to 91?1.Yes 2.No选择1.Yes,确认存入表中,标定完成,最后点击OK
9.将料位计投用,观察一个周期,仪表运行正常。
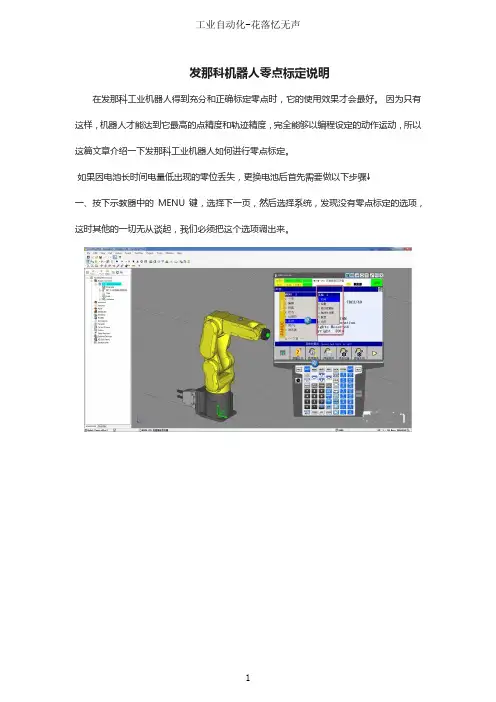
发那科机器人零点标定说明
在发那科工业机器人得到充分和正确标定零点时,它的使用效果才会最好。
因为只有这样,机器人才能达到它最高的点精度和轨迹精度,完全能够以编程设定的动作运动,所以这篇文章介绍一下发那科工业机器人如何进行零点标定。
如果因电池长时间电量低出现的零位丢失,更换电池后首先需要做以下步骤↓
一、按下示教器中的MENU键,选择下一页,然后选择系统,发现没有零点标定的选项,这时其他的一切无从谈起,我们必须把这个选项调出来。
于是我们进入系统下面的变量。
按下“Shift”键+下方向键快速下翻找到“MASET_ENB”这一项。

电子秤标定方法电子秤是一种广泛应用于商业和家庭的称重设备,它的准确性对于商家和消费者来说都至关重要。
因此,正确的标定电子秤是非常重要的。
本文将介绍电子秤的标定方法,帮助用户正确地标定电子秤,确保称重的准确性。
首先,准备工作。
在进行电子秤标定之前,首先要确保电子秤处于稳定状态,没有受到外界干扰。
同时,需要准备一些标定所需的标准物品,例如标准砝码或标准重物。
其次,进行零点标定。
零点标定是电子秤标定的第一步,它的目的是确保电子秤在无重物时显示为零。
具体操作方法是将电子秤置空,按下零点标定按钮或按照说明书上的操作步骤进行零点标定。
接下来,进行满量程标定。
满量程标定是电子秤标定的第二步,它的目的是确保电子秤在承载最大重量时显示准确。
具体操作方法是将标准砝码或标准重物放置在电子秤上,按下满量程标定按钮或按照说明书上的操作步骤进行满量程标定。
最后,进行线性标定。
线性标定是电子秤标定的最后一步,它的目的是确保电子秤在不同重量下的显示值与实际重量成线性关系。
具体操作方法是将不同重量的标准砝码或标准重物放置在电子秤上,按照说明书上的操作步骤进行线性标定。
需要注意的是,在进行电子秤标定时,应该选择一个安静、无干扰的环境,并且避免在电子秤上放置过重或过轻的物品,以免影响标定的准确性。
总之,电子秤的准确性对于商家和消费者来说都非常重要。
正确的标定方法可以确保电子秤的准确性,从而提高称重的准确性,保障商家和消费者的利益。
希望本文介绍的电子秤标定方法能够帮助用户正确地标定电子秤,保证称重的准确性。
LX-161系列控制称重仪表简易操作说明一、参数的修改1、调节参数:初始值为达到设定流量对应的输出值。
例如:当皮带秤物料厚度固定好后,秤的设定流量为20t/h,从启动仪表到仪表瞬时流量达到20t/h时,输出为60%此时应把初始输出设为60%,严禁将初始输出设为100%。
2、额定流量的选择:对应称号的额定流量。
如:1#称的额定流量为120T,那么在称重仪表上应设定为120T。
3、工作方式的选择:选择1定量给料控制。
4、测速脉冲的选择:选择1有外部测速。
5、启动方式的选择:连接PLC(中控)选1,连接485通讯即配料系统本地选择4或3(一般为4)。
6、流量方式的选择:连接PLC(中控)选1,连接485通讯即配料系统本地选择4或3。
7、通讯参数机码号应对各台称的称重仪表号相对应,绝不能有重码,(连485通讯时需要)。
8、标定参数的选择(1)流量系数(K值)标称过程中所得:实物标称过程中流量系数的人工算法:G 物料实际重量/G仪表显示重量*K原流量系数=K新的流量系数。
(2)标定圈数:根据所放物料的多少决定。
(3)整圈时间:相同速度下皮带转速恒定时测量一整圈所用的时间。
二、零点的标定:1、进行零点标定后皮带自动以最大速度运行,当速度稳定后即可进行。
2、零点标定的步骤:先按标定键,再按2键零点标定,再按绿色确定键进入时间倒计时,计时完成,显示误差值较大再重新按绿色确认键二次重新标定,直到误差达到满意后按一下绿色存储键,再按红色X键返回。
3、实物标定,即称的标定:零点标定结束后方可进行实物标定。
实物标定的步骤:先按标定键,再按功能键4,再按绿色确定键倒计时开始直到变频器速度达到50HZ时开始放物料(或砝码),实物越重越好,物料放完后,等时间倒计时完成,仪表显示重量,按绿色输入键输入实际物料重量后再重新校一次,直到仪表显示重量与实际物料重量相符为止。
4、标定后的零点值和流量系数即K值可以在数据备份中进行保存或者将每次标定的数据用笔记记录下来,以便今后修改参考。
机器人零点标定方法机器人零点标定是指在机器人工作之前,准确测量机器人各个关节的角度或位置,并将其设置为零位,以确保机器人运动的准确性。
机器人零点标定是非常重要的,因为机器人关节的角度或位置偏差会影响机器人的精度和稳定性。
下面是一种常见的机器人零点标定方法:1.准备工作在进行零点标定之前,需要将机器人放置在一个安全的位置,并确保机器人的电源处于关闭状态。
还需要为标定过程准备一些工具,如测量工具和电脑。
2.计算器准备启动机器人的计算器,并进行初始化。
这个过程意味着计算器将所有关节角度设置为零。
计算器初始化完成后,它会记录当前的关节位置和角度。
3.运动到初始位置根据机器人的工作空间和需要进行零点标定的关节,选择一个适当的初始位置。
这个位置通常是机器人能够自由运动并不会干扰其他工作的位置。
使用遥控器或计算机指令,使机器人运动到这个初始位置。
4.关节角度测量使用测量工具,如角度测量器或编码器,测量每个关节的角度。
将测量结果记录下来。
5.关节位置测量使用测量工具,如激光测距仪或测量尺,测量每个关节的位置坐标。
这些坐标可以是直角坐标系或极坐标系。
将测量结果记录下来。
6.存储角度和位置数据将测量到的关节角度和位置数据存储在机器人的计算器中。
这样,机器人的计算器就能够记住这些零点数据,并在工作期间使用它们来校准机器人的位置和角度。
7.验证零点标定在完成零点标定后,可以进行一些验证工作来确保标定的准确性。
例如,将机器人移动到其他位置,然后再将其移动回零点位置,看看是否能够准确返回。
如果返回的位置有误差,可能需要重新核对和调整标定数据。
需要注意的是,机器人的零点标定可能因不同类型的机器人而有所不同。
一些机器人可能只需要标定关节角度,而一些机器人可能需要同时标定关节角度和位置。
此外,随着机器人的使用和时间的推移,可能需要定期检查和校准机器人的零点,以确保其精度和性能。
总之,机器人零点标定是机器人工作之前的重要步骤,通过准确测量和记录机器人关节的角度和位置,能够提高机器人的精度和稳定性。
TVA2020气体检测标定步骤
1、热机后进行仪器标定,在主菜单按下2=Setup,
进入界面,按下1=Calib进入界面
.
2、零点标定,按1=Zero进入
,可对FID进行标零,按进入
,按进入,零点数值会
稳定在3000—7000之间为正常数值。
稳定后按,出现提示后按1=YES保存数值。
3、SPAN跨点标定:校准FID用甲烷标气,在校准前要先将FID甲
烷标气的浓度的浓度输入(如果以后得浓度一样无需每次输入),
在界面按6=Cfg然后按2=SPAN CON然后按键盘数字输入浓度值(例如500浓度就输入500即可)输入FID浓度
后按。
设定好后回到界面按2=Span然后按然后将取样探头插入标气袋内对FID进行标定。
数值稳定后按然后按1=YES保存数值。
仪器校准完成。
注:例如:500ppm的甲烷,响应值应为120000—140000之间为最佳。
ABB机器人零点标定基本步骤
一、准备工作
1. 确保机器人已经正确安装和调试完毕,可以进行基本的操作和运动。
2. 准备好标定所需的工具和设备,例如零点标定板、螺丝刀等。
3. 了解ABB机器人的零点标定原理和操作方法。
二、手动移动机器人
1. 打开机器人的电源,并启动机器人控制程序。
2. 在机器人控制程序中选择“手动模式”,然后使用操作手柄或键盘手动控制机器人移动。
3. 确保机器人能够平稳、准确地移动到指定的位置。
三、接近零点位置
1. 在机器人控制程序中设定机器人的零点位置,例如关节角度等。
2. 通过手动操作将机器人移动到接近零点位置,但不要超过零点位置。
3. 记录下当前机器人的位置和姿态信息。
四、执行零点标定
1. 在机器人控制程序中选择“零点标定”功能,并按照程序提示进行操作。
2. 将零点标定板放置在机器人末端执行器上,并确保连接稳定。
3. 根据程序提示,让机器人运动到各个关节的零点位置,并在每个位置上执行一次零点标定。
4. 记录下每个关节的零点位置和姿态信息。
五、确认标定结果
1. 在完成所有关节的零点标定后,关闭机器人控制程序。
2. 检查标定结果是否正确,例如关节角度是否与设定的零点位置一致。
3. 如果发现标定结果有误,需要进行重新标定或检查设备连接情况。
六、完成零点标定
1. 如果标定结果正确,将零点位置和姿态信息保存到机器人的控制程序中。
2. 在使用机器人时,将自动从零点位置开始计算关节角度和运动轨迹。
3. 定期对机器人进行零点标定以保证其精度和稳定性。
kuka零点标定的三种方法【实用版4篇】目录(篇1)第一部分:引言本文介绍了KUKA零点标定的三种方法,旨在帮助读者了解如何进行零点标定,以提高机器人的精度和稳定性。
第二部分:方法一:手动零点标定法该方法通过手动调整机器人的关节来实现零点标定。
具体步骤包括:将机器人放置在平坦表面上,调整各关节角度,记录各关节角度,然后将机器人移动到指定位置,验证零点标定的准确性。
第三部分:方法二:自动零点标定法该方法通过KUKA机器人软件进行零点标定。
具体步骤包括:将机器人放置在平坦表面上,设置零点标定的参数,启动零点标定程序,等待零点标定完成,然后将机器人移动到指定位置,验证零点标定的准确性。
第四部分:方法三:软件零点标定法该方法通过KUKA机器人软件进行零点标定。
具体步骤包括:将机器人放置在平坦表面上,设置零点标定的参数,启动零点标定程序,等待零点标定完成,然后将机器人移动到指定位置,验证零点标定的准确性。
正文(篇1)KUKA零点标定的三种方法KUKA机器人是一种常见的工业机器人,其精度和稳定性对于生产至关重要。
为了确保机器人的正常运行,需要进行零点标定。
本文介绍了KUKA零点标定的三种方法。
第一种方法是手动零点标定法。
该方法通过手动调整机器人的关节来实现零点标定。
具体步骤如下:将机器人放置在平坦表面上,调整各关节角度,记录各关节角度,然后将机器人移动到指定位置,验证零点标定的准确性。
这种方法需要较高的操作技能和经验,操作过程比较繁琐。
第二种方法是自动零点标定法。
该方法通过KUKA机器人软件进行零点标定。
具体步骤如下:将机器人放置在平坦表面上,设置零点标定的参数,启动零点标定程序,等待零点标定完成,然后将机器人移动到指定位置,验证零点标定的准确性。
这种方法自动化程度较高,操作简单,但需要安装相应的软件和硬件设备。
第三种方法是软件零点标定法。
该方法通过KUKA 机器人软件进行零点标定。
具体步骤如下:将机器人放置在平坦表面上,设置零点标定的参数,启动零点标定程序,等待零点标定完成,然后将机器人移动到指定位置,验证零点标定的准确性。