摄像头镜头参数概念sensor简介分析课件
- 格式:pptx
- 大小:1.41 MB
- 文档页数:12


sensor规格书参数的使用(1)分辨率:常见分辨率的感性表述即30万、100万、200万,正确表述应该为0.3M、1M、2M,其中M代表百万,是像素单位。
Sensor分辨率即指在单位面积上,像素的个数,数值越大,则代表像素点越多,捕获的图像细节越多,或者说图像更清晰。
像素阵列如下如所示,其中每一个像素块中均包含有RGB三原色。
(2)有效像素阵列:有效像素阵列是指在sensor的水平H(Horizontal)和垂直V (Virtical)方向上,分别含有的有效像素点的个数,很多时候,并不是所有感应器上的像素都能被运用。
通常其余部分被用来表示黑色,H与V 的乘积一般等于或大于分辨率数值。
(3)像素尺寸:像素尺寸即每个像素点的大小,单位为um(微米)。
(4)灵敏度:灵敏度表示当sensor被光均匀的照射时,当照度是1LUX(勒克斯:照度单位)时,在1s内,光电转换器所能达到的电压幅值的最大值。
单位一般是LUX/s(5)动态范围:(6)信噪比:信噪比即信号和噪声的比例,反映了sensor压制噪声的能力,单位一般是dB,数值越大,说明sensor抑制噪声的能力越强。
(7)镜头光学尺寸:镜头光学尺寸是指sensor感光面积的大小,一般常见有1/3‘’、1/4‘’、1/2.7‘’等等,其单位为英寸,表述的为sensor感光面对角线的长度。
(8)最大输出帧率:(9)数据输出格式:数据输出格式,表示sensor输出的图像数据的格式,一般常见有MONO、YUV、RAW、RGB等。
(10)数据输出接口:数据输出接口表示sensor可以与外界进行通信的接口,常见有DVP、MIPI、SPI等。
(11)工作温度范围:表示sensor能够正常工作的环境温度范围。
(12)封装:指sensor的封装形式,一般常见有CLCC、WLP、PLCC、SM等等。
手机摄像头sensor基础知识作为手机新型的拍摄功能,内置的数码相机功能与我们平时所见到的低端的(10万-130万像素)数码相机相同。
与传统相机相比,传统相机使用“胶卷”作为其记录信息的载体,而数码摄像头的“胶卷”就是其成像感光器件,是数码拍摄的心脏。
感光器是摄像头的核心,也是最关键的技术。
摄像头按结构来分,有内置和外接之分,但其基本原理是一样的。
按照其采用的感光器件来分,有CCD和CMOS之分:CCD(Charge Coupled Device,电荷耦合组件)使用一种高感光度的半导体材料制成,能把光线转变成电荷,通过模数转换器芯片转换成数字信号,数字信号经过压缩以后由相机内部的闪速存储器或内置硬盘卡保存,因而可以轻而易举地把数据传输给计算机,并借助于计算机的处理手段,根据需要和想像来修改图像。
CCD由许多感光单位组成,当CCD表面受到光线照射时,每个感光单位会将电荷反映在组件上,所有的感光单位所产生的信号加在一起,就构成了一幅完整的画面。
它就像传统相机的底片一样的感光系统,是感应光线的电路装置,你可以将它想象成一颗颗微小的感应粒子,铺满在光学镜头后方,当光线与图像从镜头透过、投射到CCD表面时,CCD就会产生电流,将感应到的内容转换成数码资料储存起来。
CCD像素数目越多、单一像素尺寸越大,收集到的图像就会越清晰。
因此,尽管CCD数目并不是决定图像品质的唯一重点,我们仍然可以把它当成相机等级的重要判准之一。
目前扫描机、摄录放一体机、数码照相机多数配备CCD。
CCD经过长达35年的发展,大致的形状和运作方式都已经定型。
CCD 的组成主要是由一个类似马赛克的网格、聚光镜片以及垫于最底下的电子线路矩阵所组成。
目前有能力生产 CCD 的公司分别为:SONY、Philps、Kodak、Matsushita、Fuji和Sharp,大半是日本厂商。
CMOS(Complementary etal-Oxide Semiconductor,附加金属氧化物半导体组件)和CCD一样同为在数码相机中可记录光线变化的半导体。
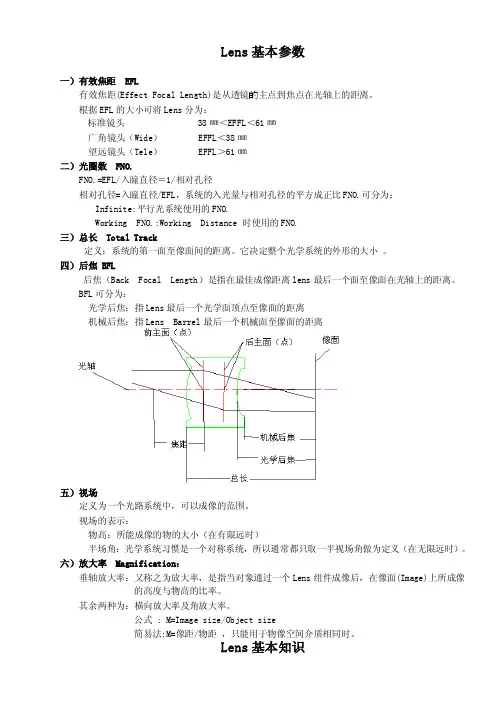
Lens基本参数一)有效焦距EFL有效焦距(Effect Focal Length)是从透镜的主点到焦点在光轴上的距离。
根据EFL的大小可将Lens分为:标准镜头38㎜<EFFL<61㎜广角镜头(Wide)EFFL<38㎜望远镜头(Tele)EFFL>61㎜二)光圈数FNO.FNO.=EFL/入瞳直径=1/相对孔径相对孔径=入瞳直径/EFL,系统的入光量与相对孔径的平方成正比FNO.可分为:Infinite:平行光系统使用的FNO.Working FNO.:Working Distance 时使用的FNO.三)总长 Total Track定义:系统的第一面至像面间的距离。
它决定整个光学系统的外形的大小。
四)后焦 BFL后焦(Back Focal Length)是指在最佳成像距离lens最后一个面至像面在光轴上的距离。
BFL可分为:光学后焦:指Lens最后一个光学面顶点至像面的距离机械后焦:指Lens Barrel最后一个机械面至像面的距离五)视场定义为一个光路系统中,可以成像的范围。
视场的表示:物高:所能成像的物的大小(在有限远时)半场角:光学系统习惯是一个对称系统,所以通常都只取一半视场角做为定义(在无限远时)。
六)放大率 Magnification:垂轴放大率:又称之为放大率,是指当对象通过一个Lens组件成像后,在像面(Image)上所成像的高度与物高的比率。
其余两种为:横向放大率及角放大率。
公式 : M=Image size/Object size简易法:M=像距/物距,只能用于物像空间介质相同时。
一)主面主点主面的定义:所谓的主面就是在Lens系统中放大率为+1的两个共轭面主面的位置:Lens系统均有两个主面,分为前主面和后主面或者称之为物方主面和像方主面,在高斯光学中,主面为一与光轴相垂直的平面主点的定义:所谓的主点就是主面与光轴的交点,它可分为前主点和后主点主点的位置:主点位于光轴上,是主面与光轴的交点二)Lens系统中光束的限制在任何Lens系统对能够进入系统的光束都有一定的选择性,而这些功能是通过光阑来实现的。
摄像头-Camerasensor基本知识⼀、Camera ⼯作原理介绍1. 结构 .⼀般来说,camera 主要是由 lens 和 sensor IC 两部分组成,其中有的 sensor IC 集成 了 DSP,有的没有集成,但也需要外部 DSP 处理。
细分的来讲,camera 设备由下边⼏部 分构成: b$ w6 [# i& q% p* E1) lens(镜头) ⼀般 camera 的镜头结构是有⼏⽚透镜组成,分有塑胶透镜(Plastic)和玻璃透 镜(Glass) ,通常镜头结构有:1P,2P,1G1P,1G3P,2G2P,4G 等。
2) sensor(图像传感器) Senor 是⼀种半导体芯⽚,有两种类型:CCD 和 CMOS。
Sensor 将从 lens 上传导过来的光线转换为电信号, 再通过内部的 AD 转换为数字信号。
由于 Sensor 的每个 pixel 只能感光 R 光或者 B 光或者 G 光, 因此每个像素此时存贮的是单⾊的, 我们称之为 RAW DATA 数据。
要想将每个像素的 RAW DATA 数据还原成三基⾊,就需要 ISP 来处理。
3)ISP(图像信号处理) 主要完成数字图像的处理⼯作,把 sensor 采集到的原始数据转换为显⽰⽀持 的格式。
2 {4 w# {. R- z% Y4)CAMIF(camera 控制器) 芯⽚上的 camera 接⼝电路,对设备进⾏控制,接收 sensor 采集的数据交给 CPU,并送⼊ LCD 进⾏显⽰。
2. ⼯作原理 . & W* e" B3 D6 O) |4 k外部光线穿过 lens 后, 经过 color filter 滤波后照射到 Sensor ⾯上, Sensor 将从 lens 上传导过来的光线转换为电信号,再通过内部的 AD 转换为数字信号。
如果 Sensor 没有集 成 DSP,则通过 DVP 的⽅式传输到 baseband,此时的数据格式是 RAW DATA。