nrf24L01发送接收流程图
- 格式:pdf
- 大小:121.19 KB
- 文档页数:8
nRF24L01无线模块6个接收通道_发送nRF24L01#include"nRF24L01.h"//uchar code TX_ADDRESS[TX_ADR_WIDTH] = {0x34,0x43,0x10,0x10,0x01}; // 定义一个静态发送地址uchar code TX_ADDRESS[TX_ADR_WIDTH] = {0xb2,0xb2,0xb3,0xb4,0x01};//uchar code TX_ADDRESS[TX_ADR_WIDTH] = {0x02,0xb4,0xb3,0xb2,0xb1};uchar RX_BUF[TX_PLOAD_WIDTH];uchar TX_BUF[TX_PLOAD_WIDTH]={0x01,0x02,0x03,0x4,0x05,0x06,0x07,0x08,0x09,0x10,0x11,0x12,0x13,0x14,0x15,0x16,0x17,0x18,0x19,0x20,0x21,0x22,0x23,0x24,0x25,0x26,0x27,0x28,0x29,0x30,0x31,0x32,};uchar flag,status;uchar DATA = 0x01;uchar bdata sta;sbit RX_DR = sta^6;sbit TX_DS = sta^5;sbit MAX_RT = sta^4;/**************************************************//**************************************************函数: init_io()描述:初始化IO/**************************************************/ void init_io(void){CE = 0; // 待机CSN = 1; // SPI禁止SCK = 0; // SPI时钟置低IRQ = 1; // 中断复位LED = 0x00; // 关闭指示灯}/**************************************************//************************************************** 函数:delay_ms()描述:延迟x毫秒/**************************************************/ void delay_ms(uchar x){uchar i, j;i = 0;for(i=0; i{j = 250;while(--j);j = 250;while(--j);}}/**************************************************//**************************************************函数:SPI_RW()描述:根据SPI协议,写一字节数据到nRF24L01,同时从nRF24L01 读出一字节/**************************************************/uchar SPI_RW(uchar byte){uchar i;for(i=0; i<8; i++) // 循环8次{MOSI = (byte & 0x80); // byte最高位输出到MOSIbyte <<= 1; // 低一位移位到最高位SCK = 1; // 拉高SCK,nRF24L01从MOSI读入1位数据,同时从MISO输出1位数据byte |= MISO; // 读MISO到byte最低位SCK = 0; // SCK置低}return(byte); // 返回读出的一字节}/**************************************************//**************************************************函数:SPI_RW_Reg()描述:写数据value到reg寄存器/**************************************************/ uchar SPI_RW_Reg(uchar reg, uchar value){uchar status;CSN = 0; // CSN置低,开始传输数据status = SPI_RW(reg); // 选择寄存器,同时返回状态字SPI_RW(value); // 然后写数据到该寄存器CSN = 1; // CSN拉高,结束数据传输return(status); // 返回状态寄存器}/**************************************************//************************************************** 函数:SPI_Read()描述:从reg寄存器读一字节/**************************************************/uchar SPI_Read(uchar reg){uchar reg_val;CSN = 0; // CSN置低,开始传输数据SPI_RW(reg); // 选择寄存器reg_val = SPI_RW(0); // 然后从该寄存器读数据CSN = 1; // CSN拉高,结束数据传输return(reg_val); // 返回寄存器数据}/**************************************************//**************************************************函数:SPI_Read_Buf()描述:从reg寄存器读出bytes个字节,通常用来读取接收通道数据或接收/发送地址/**************************************************/ uchar SPI_Read_Buf(uchar reg, uchar * pBuf, uchar bytes) {uchar status, i;CSN = 0; // CSN置低,开始传输数据status = SPI_RW(reg); // 选择寄存器,同时返回状态字for(i=0; ipBuf[i] = SPI_RW(0); // 逐个字节从nRF24L01读出CSN = 1; // CSN拉高,结束数据传输return(status); // 返回状态寄存器}/**************************************************//**************************************************函数:SPI_Write_Buf()描述:把pBuf缓存中的数据写入到nRF24L01,通常用来写入发射通道数据或接收/发送地址/**************************************************/uchar SPI_Write_Buf(uchar reg, uchar * pBuf, uchar bytes){uchar status, i;CSN = 0; // CSN置低,开始传输数据status = SPI_RW(reg); // 选择寄存器,同时返回状态字for(i=0; iSPI_RW(pBuf[i]); // 逐个字节写入nRF24L01CSN = 1; // CSN拉高,结束数据传输return(status); // 返回状态寄存器}/**************************************************//**************************************************函数:RX_Mode()描述:这个函数设置nRF24L01为接收模式,等待接收发送设备的数据包/**************************************************/void RX_Mode(void){CE = 0;SPI_Write_Buf(WRITE_REG + RX_ADDR_P0, TX_ADDRESS, TX_ADR_WIDTH); // 接收设备接收通道0使用和发送设备相同的发送地址// SPI_Write_Buf(WRITE_REG + RX_ADDR_P1, RX_ADDRESS1, TX_ADR_WIDTH);// SPI_Write_Buf(WRITE_REG + RX_ADDR_P2, RX_ADDRESS2, TX_ADR_WIDTH);// SPI_RW_Reg(WRITE_REG + RX_PW_P1, TX_PLOAD_WIDTH);SPI_RW_Reg(WRITE_REG + EN_AA, 0x3f); // 使能接收通道0自动应答SPI_RW_Reg(WRITE_REG + EN_RXADDR, 0x3f); // 使能接收通道0SPI_RW_Reg(WRITE_REG + RF_CH, 40); // 选择射频通道0x40 SPI_RW_Reg(WRITE_REG + RX_PW_P0, TX_PLOAD_WIDTH); // 接收通道0选择和发送通道相同有效数据宽度SPI_RW_Reg(WRITE_REG + RF_SETUP, 0x07); // 数据传输率1Mbps,发射功率0dBm,低噪声放大器增益SPI_RW_Reg(WRITE_REG + CONFIG, 0x0f); // CRC使能,16位CRC校验,上电,接收模式CE = 1; // 拉高CE启动接收设备}/**************************************************//**************************************************函数:TX_Mode()描述:这个函数设置nRF24L01为发送模式,(CE=1持续至少10us),130us后启动发射,数据发送结束后,发送模块自动转入接收模式等待应答信号。
在STM32战舰开发板上测试,接受采用IRQ引脚产生外部中断。
发送数据字节长度可以动态改变,接收端也可以读取到发送方实际发送字节长度。
战舰开发板为接收端。
然后将接受数据通过USART1发送至电脑,使用DMA传输方式,波。
STM32F103ZET6与NRF24L01 SPI 通信速率为9MHz。
24L01.c文件代码#include "24l01.h"#include "lcd.h"#include "delay.h"#include "spi.h"const uint8_t TX_ADDRESS[TX_ADR_WIDTH]={0x34,0x43,0x10,0x10,0x01}; //发送地址const uint8_t RX_ADDRESS[RX_ADR_WIDTH]={0x34,0x43,0x10,0x10,0x01}; //发送地址//初始化24L01的IO口void NRF24L01_Init(void){GPIO_InitTypeDefGPIO_InitStructure;SPI_InitTypeDefSPI_InitStructure;NVIC_InitTypeDef NVIC_InitStructure;EXTI_InitTypeDef EXTI_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB|RCC_APB2Periph_GPIOD|RCC_APB2Pe riph_GPIOG |RCC_APB2Periph_AFIO, ENABLE); //使能PB,D,G端口时钟GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12; //PB12上拉防止W25X的干扰GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure); //初始化指定IOGPIO_SetBits(GPIOB,GPIO_Pin_12);//上拉GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; //PD2推挽输出上拉禁止SD卡的干扰GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出GPIO_SetBits(GPIOD,GPIO_Pin_2);//初始化指定IOGPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7; //PG6 7 推挽GPIO_Init(GPIOG, &GPIO_InitStructure);//初始化指定IORCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE); //使能复用功能时钟GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOG, &GPIO_InitStructure);GPIO_EXTILineConfig(GPIO_PortSourceGPIOG,GPIO_PinSource8);EXTI_InitStructure.EXTI_Line = EXTI_Line8;EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;EXTI_InitStructure.EXTI_LineCmd = ENABLE;EXTI_Init(&EXTI_InitStructure);NVIC_InitStructure.NVIC_IRQChannel = EXTI9_5_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);NRF24L01_CE=0; //使能24L01NRF24L01_CSN=1; //SPI片选取消SPI2_Init(); //初始化SPISPI_Cmd(SPI2, DISABLE); // SPI外设不使能SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //SPI设置为双线双向全双工SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //SPI主机SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //发送接收8位帧结构SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low; //时钟悬空低SPI_InitStructure.SPI_CPHA = SPI_CPHA_1Edge; //数据捕获于第1个时钟沿SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //NSS信号由软件控制SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_16; //定义波特率预分频的值:波特率预分频值为16SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //数据传输从MSB位开始SPI_InitStructure.SPI_CRCPolynomial = 7; //CRC值计算的多项式SPI_Init(SPI2, &SPI_InitStructure); //根据SPI_InitStruct中指定的参数初始化外设SPIx寄存器SPI_Cmd(SPI2, ENABLE); //使能SPI外设SPI2_SetSpeed(SPI_BaudRatePrescaler_4);//9MHz}//检测24L01是否存在//返回值:0,成功;1,失败u8 NRF24L01_Check(void){u8buf[5]={0XA5,0XA5,0XA5,0XA5,0XA5};u8i;NRF24L01_Write_Buf(WRITE_REG_NRF+TX_ADDR,buf,5);//写入5个字节的地址.NRF24L01_Read_Buf(TX_ADDR,buf,5); //读出写入的地址for(i=0;i<5;i++)if(buf[i]!=0XA5)break;if(i!=5)return 1;//检测24L01错误return 0; //检测到24L01}//SPI写寄存器//reg:指定寄存器地址//value:写入的值u8 NRF24L01_Write_Reg(u8 reg,u8 value){u8 status;NRF24L01_CSN=0; //使能SPI传输status =SPI2_ReadWriteByte(reg);//发送寄存器号SPI2_ReadWriteByte(value); //写入寄存器的值NRF24L01_CSN=1; //禁止SPI传输return(status); //返回状态值}//读取SPI寄存器值//reg:要读的寄存器u8 NRF24L01_Read_Reg(u8 reg){u8 reg_val;NRF24L01_CSN = 0; //使能SPI传输SPI2_ReadWriteByte(reg); //发送寄存器号reg_val=SPI2_ReadWriteByte(0XFF);//读取寄存器内容NRF24L01_CSN = 1; //禁止SPI传输return(reg_val); //返回状态值}//在指定位置读出指定长度的数据//reg:寄存器(位置)//*pBuf:数据指针//len:数据长度//返回值,此次读到的状态寄存器值u8 NRF24L01_Read_Buf(u8 reg,u8 *pBuf,u8 len){u8 status,u8_ctr;NRF24L01_CSN = 0; //使能SPI传输status=SPI2_ReadWriteByte(reg);//发送寄存器值(位置),并读取状态值for(u8_ctr=0;u8_ctr<len;u8_ctr++)pBuf[u8_ctr]=SPI2_ReadWriteByte(0XFF);//读出数据NRF24L01_CSN=1; //关闭SPI传输return status; //返回读到的状态值}//在指定位置写指定长度的数据//reg:寄存器(位置)//*pBuf:数据指针//len:数据长度//返回值,此次读到的状态寄存器值u8 NRF24L01_Write_Buf(u8 reg, u8 *pBuf, u8 len){u8 status,u8_ctr;NRF24L01_CSN = 0; //使能SPI传输status = SPI2_ReadWriteByte(reg);//发送寄存器值(位置),并读取状态值for(u8_ctr=0; u8_ctr<len; u8_ctr++)SPI2_ReadWriteByte(*pBuf++); //写入数据NRF24L01_CSN = 1; //关闭SPI传输return status; //返回读到的状态值}//启动NRF24L01发送一次数据//txbuf:待发送数据首地址//返回值:发送完成状况u8 NRF24L01_TxPacket(u8 *txbuf,u8 length){u8sta;NRF24L01_CE=0;if(length>=32)return 0;else{NRF24L01_Write_Buf(WR_TX_PLOAD,txbuf,length);//写数据到TX BUF32个字节}NRF24L01_CE=1;//启动发送while(NRF24L01_IRQ!=0);//等待发送完成sta=NRF24L01_Read_Reg(STATUS); //读取状态寄存器的值NRF24L01_Write_Reg(WRITE_REG_NRF+STATUS,sta); //清除TX_DS或MAX_RT中断标志if(sta&MAX_TX)//达到最大重发次数{NRF24L01_Write_Reg(FLUSH_TX,0xff);//清除TX FIFO寄存器return MAX_TX;}if(sta&TX_OK)//发送完成{return TX_OK;}return 0xff;//其他原因发送失败}//启动NRF24L01发送一次数据//txbuf:待发送数据首地址//返回值:0,接收完成;其他,错误代码u8 NRF24L01_RxPacket(u8 *rxbuf){u8sta;sta=NRF24L01_Read_Reg(STATUS); //读取状态寄存器的值NRF24L01_Write_Reg(WRITE_REG_NRF+STATUS,sta); //清除TX_DS或MAX_RT中断标志if(sta&RX_OK)//接收到数据{NRF24L01_Read_Buf(RD_RX_PLOAD,rxbuf,RX_PLOAD_WIDTH);//读取数据NRF24L01_Write_Reg(FLUSH_RX,0xff);//清除RX FIFO寄存器return 0;}return 1;//没收到任何数据}//该函数初始化NRF24L01到RX模式//设置RX地址,写RX数据宽度,选择RF频道,波特率和LNA HCURR//当CE变高后,即进入RX模式,并可以接收数据了void NRF24L01_RX_Mode(void){NRF24L01_CE=0;NRF24L01_Write_Buf(WRITE_REG_NRF+RX_ADDR_P0,(u8*)RX_ADDRESS,RX_ADR_WIDTH);/ /写RX节点地址NRF24L01_Write_Reg(WRITE_REG_NRF+EN_AA,EN_P0); //使能通道0的自动应答NRF24L01_Write_Reg(WRITE_REG_NRF+EN_RXADDR,EN_P0);//使能通道0的接收地址NRF24L01_Write_Reg(WRITE_REG_NRF+RF_CH,40); //设置RF通信频率NRF24L01_Write_Reg(WRITE_REG_NRF+RX_PW_P0,RX_PLOAD_WIDTH);//选择通道0的有效数据宽度NRF24L01_Write_Reg(WRITE_REG_NRF+RF_SETUP,0x0f);//设置TX发射参数,0db增益,2Mbps,低噪声增益开启NRF24L01_Write_Reg(WRITE_REG_NRF+CONFIG, 0x0f);//配置基本工作模式的参数;PWR_UP,EN_CRC,16BIT_CRC,接收模式#if EN_DYNAMIC_DATA_LENGTH //使能动态数据长度NRF24L01_Write_Reg(WRITE_REG_NRF+FEATURE,EN_DPL);NRF24L01_Write_Reg(WRITE_REG_NRF+DYNPD,EN_P0);#endifNRF24L01_CE = 1; //CE为高,130us进入接收模式delay_us(500);}//该函数初始化NRF24L01到TX模式//设置TX地址,写TX数据宽度,设置RX自动应答的地址,填充TX发送数据,选择RF频道,波特率和LNA HCURR//PWR_UP,CRC使能//当CE变高后,即进入RX模式,并可以接收数据了//CE为高大于10us,则启动发送.void NRF24L01_TX_Mode(void){NRF24L01_CE=0;NRF24L01_Write_Buf(WRITE_REG_NRF+TX_ADDR,(u8*)TX_ADDRESS,TX_ADR_WIDTH);//写TX节点地址NRF24L01_Write_Buf(WRITE_REG_NRF+RX_ADDR_P0,(u8*)RX_ADDRESS,RX_ADR_WIDTH); //设置TX节点地址,主要为了使能ACKNRF24L01_Write_Reg(WRITE_REG_NRF+EN_AA,EN_P0); //使能通道0的自动应答NRF24L01_Write_Reg(WRITE_REG_NRF+EN_RXADDR,EN_P0); //使能通道0的接收地址NRF24L01_Write_Reg(WRITE_REG_NRF+SETUP_RETR,0x1a);//设置自动重发间隔时间:500us + 86us;最大自动重发次数:10次#if EN_DYNAMIC_DATA_LENGTH //动态数据长度发送NRF24L01_Write_Reg(WRITE_REG_NRF+FEATURE,EN_DPL);NRF24L01_Write_Reg(WRITE_REG_NRF+DYNPD,EN_P0);#endifNRF24L01_Write_Reg(WRITE_REG_NRF+RF_CH,40); //设置RF通道为40NRF24L01_Write_Reg(WRITE_REG_NRF+RF_SETUP,0x0f); //设置TX发射参数,0db增益,2Mbps,低噪声增益开启NRF24L01_Write_Reg(WRITE_REG_NRF+CONFIG,0x0e); //配置基本工作模式的参数;PWR_UP,EN_CRC,16BIT_CRC,发射模式,开启所有中断NRF24L01_CE=1;//CE为高,10us后启动发送delay_us(20);}24L01.h文件#ifndef __24L01_H#define __24L01_H#include "sys.h"#include <stdint.h>/* Enable dynamic length, not need send or receive packet data of a fixed length */#define EN_DYNAMIC_DATA_LENGTH 1 //使能动态数据长度/*NRF24L01 type */#define _NRF24L01//#define _NRF24L01P//#define _NRF24L01N#if defined(_NRF24L01) && defined(_NRF24L01P)#error "You can only select one of NRF24L01x,not two or more!!!!!!"#endif#if defined(_NRF24L01) && defined(_NRF24L01N)#error "You can only select one of NRF24L01x,not two or more!!!!!!"#endif#if defined(_NRF24L01P) && defined(_NRF24L01N)#error "You can only select one of NRF24L01x,not two or more!!!!!!"#endif#define RESERVED 0x00#define EN_P5 0x20#define EN_P4 0x10#define EN_P3 0x08#define EN_P2 0x04#define EN_P1 0x02#define EN_P0 0x01//NRF24L01寄存器操作命令#define READ_REG_NRF 0x00 //读配置寄存器,低5位为寄存器地址#define WRITE_REG_NRF 0x20 //写配置寄存器,低5位为寄存器地址#define RD_RX_PLOAD 0x61 //读RX有效数据,1~32字节#define WR_TX_PLOAD 0xA0 //写TX有效数据,1~32字节#define FLUSH_TX 0xE1 //清除TX FIFO寄存器.发射模式下用#define FLUSH_RX 0xE2 //清除RX FIFO寄存器.接收模式下用#define REUSE_TX_PL 0xE3 //重新使用上一包数据,CE为高,数据包被不断发送.#define R_RX_PL_WID 0x60 //读取动态数据长度接受时读取接受到有效数据的数目#define NOP 0xFF //空操作,可以用来读状态寄存器//SPI(NRF24L01)寄存器地址#define CONFIG 0x00 //配置寄存器地址;bit0:1接收模式,0发射模式;bit1:电选择;bit2:CRC模式;bit3:CRC使能;//bit4:中断MAX_RT(达到最大重发次数中断)使能;bit5:中断TX_DS使能;bit6:中断RX_DR使能#define EN_AA 0x01 //使能自动应答功能bit0~5,对应通道0~5#define EN_RXADDR 0x02 //接收地址允许,bit0~5,对应通道0~5#define SETUP_AW 0x03 //设置地址宽度(所有数据通道):bit1,0:00,3字节;01,4字节;02,5字节;#define SETUP_RETR 0x04 //建立自动重发;bit3:0,自动重发计数器;bit7:4,自动重发延时250*x+86us#define RF_CH 0x05 //RF通道,bit6:0,工作通道频率;#define RF_SETUP 0x06 //RF寄存器;bit3:传输速率(0:1Mbps,1:2Mbps);bit2:1,发射功率;bit0:低噪声放大器增益#if defined(_NRF24L01P)#define CONT_WAVE (1<<7)#define RF_DR_RATE_1Mbps 0#define RF_DR_RATE_2Mbps (1<<0)#define RF_DR_RATE_250kbps (1<<1)#define RF_DR_RATE_Reserved ((1<<0) | (1<<1))#endif#define STATUS 0x07 //状态寄存器;bit0:TX FIFO满标志;bit3:1,接收数据通道号(最大:6);bit4,达到最多次重发//bit5:数据发送完成中断;bit6:接收数据中断;#define MAX_TX 0x10 //达到最大发送次数中断#define TX_OK 0x20 //TX发送完成中断#define RX_OK 0x40 //接收到数据中断#define OBSERVE_TX 0x08 //发送检测寄存器,bit7:4,数据包丢失计数器;bit3:0,重发计数器#define CD 0x09 //载波检测寄存器,bit0,载波检测;#define RX_ADDR_P0 0x0A //数据通道0接收地址,最大长度5个字节,低字节在前#define RX_ADDR_P1 0x0B //数据通道1接收地址,最大长度5个字节,低字节在前#define RX_ADDR_P2 0x0C //数据通道2接收地址,最低字节可设置,高字节,必须同RX_ADDR_P1[39:8]相等;#define RX_ADDR_P3 0x0D //数据通道3接收地址,最低字节可设置,高字节,必须同RX_ADDR_P1[39:8]相等;#define RX_ADDR_P4 0x0E //数据通道4接收地址,最低字节可设置,高字节,必须同RX_ADDR_P1[39:8]相等;#define RX_ADDR_P5 0x0F //数据通道5接收地址,最低字节可设置,高字节,必须同RX_ADDR_P1[39:8]相等;#define TX_ADDR 0x10 //发送地址(低字节在前),ShockBurstTM模式下,RX_ADDR_P0与此地址相等#define RX_PW_P0 0x11 //接收数据通道0有效数据宽度(1~32字节),设置为0则非法#define RX_PW_P1 0x12 //接收数据通道1有效数据宽度(1~32字节),设置为0则非法#define RX_PW_P2 0x13 //接收数据通道2有效数据宽度(1~32字节),设置为0则非法#define RX_PW_P3 0x14 //接收数据通道3有效数据宽度(1~32字节),设置为0则非法#define RX_PW_P4 0x15 //接收数据通道4有效数据宽度(1~32字节),设置为0则非法#define RX_PW_P5 0x16 //接收数据通道5有效数据宽度(1~32字节),设置为0则非法#define NRF_FIFO_STATUS 0x17 //FIFO状态寄存器;bit0,RX FIFO寄存器空标志;bit1,RX FIFO满标志;bit2,3,保留//bit4,TX FIFO空标志;bit5,TX FIFO满标志;bit6,1,循环发送上一数据包.0,不循环;#define DYNPD 0x1C //使能动态载荷长度寄存器#define FEATURE 0x1D //特性寄存器#define EN_DPL 0x04#define EN_ACK_PAY 0x02#define EN_DYN_ACK 0x01////////////////////////////////////////////////////////////////////////////////////////////////////// //////24L01操作线#define NRF24L01_CE PGout(6) //24L01片选信号#define NRF24L01_CSN PGout(7) //SPI片选信号#define NRF24L01_IRQ PGin(8) //IRQ主机数据输入//24L01发送接收数据宽度定义#define TX_ADR_WIDTH 5 //5字节的地址宽度#define RX_ADR_WIDTH 5 //5字节的地址宽度#define TX_PLOAD_WIDTH 16 //32字节的用户数据宽度#define RX_PLOAD_WIDTH 16 //32字节的用户数据宽度typedef struct{u8 Recv_Buf1[RX_PLOAD_WIDTH];//接受缓冲区1u8 Recv_Buf2[RX_PLOAD_WIDTH];//接受缓冲区2u8 Recv_ValidData_Length;//接受到合法数据长度u8 *pRecv_Buf_Point;//指向接受缓冲区的首地址u8 Recv_Data_Flag;//接受到数据标志位}NRF24L01_RECV_DATA_TYPE;extern NRF24L01_RECV_DATA_TYPE nrf24l01_Recv_Data_Param;void NRF24L01_Init(void);//初始化void NRF24L01_RX_Mode(void);//配置为接收模式void NRF24L01_TX_Mode(void);//配置为发送模式u8 NRF24L01_Write_Buf(u8 reg, u8 *pBuf, u8 u8s);//写数据区u8 NRF24L01_Read_Buf(u8 reg, u8 *pBuf, u8 u8s);//读数据区u8 NRF24L01_Read_Reg(u8 reg); //读寄存器u8 NRF24L01_Write_Reg(u8 reg, u8 value);//写寄存器u8 NRF24L01_Check(void);//检查24L01是否存在u8 NRF24L01_RxPacket(u8 *rxbuf);//接收一个包的数据u8 NRF24L01_TxPacket(u8 *txbuf,u8 length);#endifMain.c文件#include "led.h"#include "delay.h"#include "sys.h"#include "24l01.h"#include "usart.h"#include <string.h>NRF24L01_RECV_DATA_TYPE nrf24l01_Recv_Data_Param;u8 U8_USART3_TX_BUF[100];void NRF24L01_IRQHandler(void);voidError_Handler(void);int main(void){delay_init();NVIC_Configuration();LED_Init();USART_Config();delay_ms(1500); //战舰版USB-232接口通电,程序会短暂复位,避免影响后面接收delay_ms(1500);NRF24L01_Init();/* Check the existance of NRF24L01 or the SPI communication between MCU and NRF24L01 is working normally or not */while(NRF24L01_Check()){Error_Handler();}/* Set the pRecv_Buf_Point point to the buf1 */nrf24l01_Recv_Data_Param.pRecv_Buf_Point = nrf24l01_Recv_Data_Param.Recv_Buf1;/* Set PRX mode */NRF24L01_RX_Mode();/* Clear NRF24L01 IRQ bits of the register */NRF24L01_Write_Reg(WRITE_REG_NRF+STATUS,0x7f);while(1){if(nrf24l01_Recv_Data_Param.Recv_Data_Flag == 1){nrf24l01_Recv_Data_Param.Recv_Data_Flag = 0;/* Indicating LED */LED0 = 0;/* Read out the received data and data length from the FIFO of the NRF24L01 */NRF24L01_Write_Reg(WRITE_REG_NRF+STATUS,0x7f); //清除TX_DS或MAX_RT 中断标志NRF24L01_Read_Buf(R_RX_PL_WID,&nrf24l01_Recv_Data_Param.Recv_ValidData_Length,1 );//读取有效数据长度NRF24L01_Read_Buf(RD_RX_PLOAD,nrf24l01_Recv_Data_Param.pRecv_Buf_Point,nrf24l01_Recv_Data_Param.Recv_ValidData_Length);//读取数据NRF24L01_Write_Reg(FLUSH_RX,0xff);//清除RX FIFO寄存器/* Copy data read to the memory using DMA channel */memcpy((void *)U8_USART3_TX_BUF,(const void *)nrf24l01_Recv_Data_Param.pRecv_Buf_Point,nrf24l01_Recv_Data_Param.Recv_ValidData_Length);/* Start sending data packet by USART DMA */USART1_DMA_Send_Hex_Data(nrf24l01_Recv_Data_Param.Recv_ValidData_Length);}else{LED0 = 1;}}}void EXTI9_5_IRQHandler(void){if(EXTI_GetITStatus(EXTI_Line8) != RESET){NRF24L01_IRQHandler();EXTI_ClearITPendingBit(EXTI_Line8);}}void NRF24L01_IRQHandler(void){nrf24l01_Recv_Data_Param.Recv_Data_Flag = 1; }voidError_Handler(void){LED1 = 0;delay_ms(200);LED1 = 1;delay_ms(200);}。
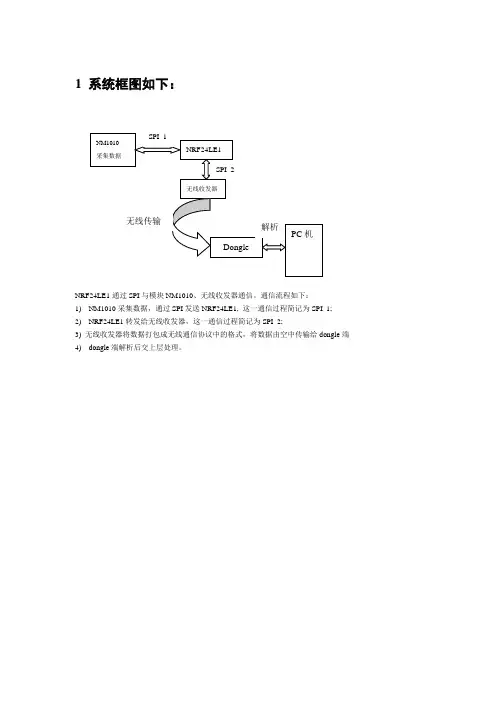
1 系统框图如下:NRF24LE1通过SPI与模块NM1010、无线收发器通信。
通信流程如下:1) NM1010采集数据,通过SPI发送NRF24LE1, 这一通信过程简记为SPI_1;2) NRF24LE1转发给无线收发器,这一通信过程简记为SPI_2;3) 无线收发器将数据打包成无线通信协议中的格式,将数据由空中传输给dongle端4) dongle端解析后交上层处理。
2NRF24LE1与模块通信过程Main流程图如下:SPI_1过程直接返回Motion、Delta_X_L、Delta_Y_L、Delta_X|Y_H的值。
主机根据HID报告描述符里的mouse_report,转换数据格式,发送给无线模块。
SPI_2过程传输的数据包格式如下:3 无线收发器模块鼠标与dongle 之间通过彼此的射频收发器通信,MCU 通过三个接口(RFCON.rfce ,RFCON.rfcsn ,RFIRQ )对射频收发器进行控制;register map 为寄存器映射,用于保存MCU 对于射频收发的配置;TX FIFOs 、RX FIFOs 分别用于存储待发送和接收到的数据包。
在两个射频收发器之间进行的包的交换,一个射频收发器作为主接收(PRX ),另一个射频收发器作为主发送(PTX)。
包的自动处理过程如下:图1 发送模式 图2 接收模式在增强型 ShockBurst 中可以设定重发的次数和重发的间隔参数,而后所有的工作均由增强型ShockBurst 自动完成而无需MCU 的干预。
表1 数据包描述4 无线传输过程nRF24L01 在接收模式下可以接收6 路不同通道的数据,见图。
每一个数据通道使用不同的地址,但是共用相同的频道。
数据通道0是唯一的一个可以配置为40 位自身地址的数据通道。
1~5 数据通道都为8 位自身地址和32 位公用地址,地址设置在RX_ADDR_Px寄存器,高四字节相同,byte 0地址唯一,如下图所示。

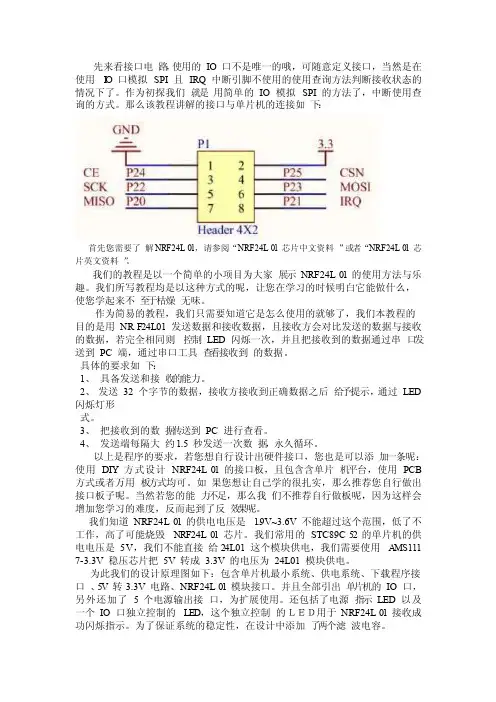
先来看接口电路,使用的IO 口不是唯一的哦,可随意定义接口,当然是在使用 I O 口模拟SPI 且IRQ 中断引脚不使用的使用查询方法判断接收状态的情况下了。
作为初探我们就是用简单的IO 模拟SPI 的方法了,中断使用查询的方式。
那么该教程讲解的接口与单片机的连接如下:首先您需要了解NRF24L01,请参阅“NRF24L01 芯片中文资料”或者“NRF24L01 芯片英文资料”。
我们的教程是以一个简单的小项目为大家展示NRF24L01 的使用方法与乐趣。
我们所写教程均是以这种方式的呢,让您在学习的时候明白它能做什么,使您学起来不至于枯燥无味。
作为简易的教程,我们只需要知道它是怎么使用的就够了,我们本教程的目的是用NRF24L01发送数据和接收数据,且接收方会对比发送的数据与接收的数据,若完全相同则控制LED 闪烁一次,并且把接收到的数据通过串口发送到PC 端,通过串口工具查看接收到的数据。
具体的要求如下:1、具备发送和接收的能力。
2、发送32 个字节的数据,接收方接收到正确数据之后给予提示,通过LED 闪烁灯形式。
3、把接收到的数据传送到PC 进行查看。
4、发送端每隔大约1.5 秒发送一次数据,永久循环。
以上是程序的要求,若您想自行设计出硬件接口,您也是可以添加一条呢:使用DIY 方式设计NRF24L01 的接口板,且包含含单片机平台,使用PCB 方式或者万用板方式均可。
如果您想让自己学的很扎实,那么推荐您自行做出接口板子呢。
当然若您的能力不足,那么我们不推荐自行做板呢,因为这样会增加您学习的难度,反而起到了反效果呢。
我们知道NRF24L01 的供电电压是 1.9V~3.6V 不能超过这个范围,低了不工作,高了可能烧毁 NRF24L01 芯片。
我们常用的STC89C52 的单片机的供电电压是5V,我们不能直接给24L01这个模块供电,我们需要使用 A MS1117-3.3V 稳压芯片把5V 转成3.3V 的电压为24L01 模块供电。
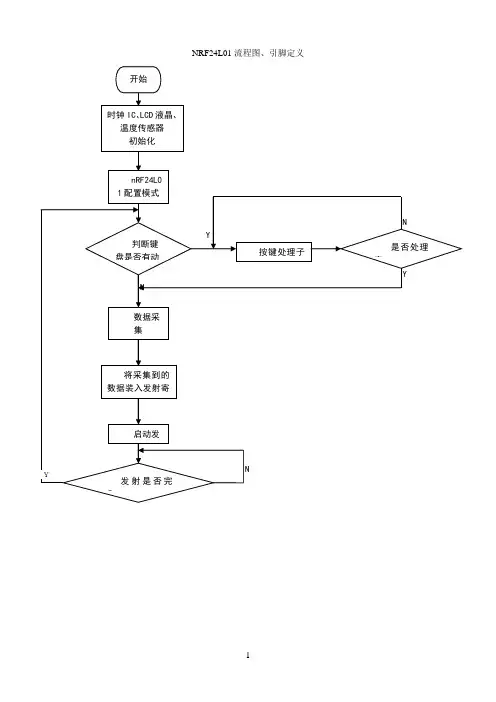
NRF24L01流程图、引脚定义
N Y
Y
N
N
开始
时钟IC 、LCD 液晶、温度传感器 初始化
nRF24L01配置模式
判断键盘是否有动数据采集 将采集到的数据装入发射寄启动发发射是否完成 按键处理子
是否处理
完
Y
开始上电
待机模
式I
CE
有数
据包在
发射处
理
发射模
式发送数据
自动
重发使能
NO_A
CK有效
置位
TX_DS
CE
有数
据包在
有数
据包
CE待机模
接收
模式
应答
是否接收
应
答
把ACK
加载到接收
置位
TX_DS 发射处
理
发射模式
重发上一次数
据包
置位
MAX_RT
接收模式
待机模
CE
CE
接收处理
开始上电
接收
FIFO满了
接收
到数据
自动
应答使能
是新
把数据包放入接收
FIFO并置位RX_DR
把数据包放入接收
FIFO并置位RX_DR
IRQ
开始
初始化
把数据装载到数据发送结
结束。

#include <> #include <>typedef unsigned char uchar;typedef unsigned char uint;SCK = 1;uchar |= MISO; then set SCK low again}return(uchar); .SPI_RW(reg);reg_val = SPI_RW(0); then read registervalueCSN = 1; and write value to it..CSN = 1;SCK = 1;uchar |= MISO; then set SCK low again}return(uchar); .SPI_RW(reg);reg_val = SPI_RW(0); then read registervalueCSN = 1; and write value to it..CSN = 1; // CSN high again/* 函数: uint SPI_Read_Buf(uchar reg, uchar *pBuf, uchar uchars) /* 功能 : 用于读数据,reg :为寄存器地址,pBuf :为待读出数据地址, uchars :读出数据的个数******************* uint SPI_Read_Buf(uchar reg, uchar *pBuf, uchar uchars){uint status,uchar_ctr;CSN = 0; // Set CSN low, init SPI tranaction return(status); }// return nRF24L01 status ucharstatus = SPI_RW(reg); // Select register to write to and read status ucharfor(uchar_ctr=0;uchar_ctr<uchars;uchar_ctr++)pBuf[uchar_ctr] = SPI_RW(0); //CSN = 1;return(status); // return nRF24L01 status uchar}/**************************/* 函数:uint SPI_Write_Buf(uchar reg, uchar *pBuf, uchar uchars)/* 功能: 用于写数据:为寄存器地址,pBuf :为待写入数据地址,uchars :写入数据的个数/**************************/uint SPI_Write_Buf(uchar reg, uchar *pBuf, uchar uchars){uint status,uchar_ctr;CSN = 0; //SPI 使能status = SPI_RW(reg);for(uchar_ctr=0; uchar_ctr<uchars; uchar_ctr++) //SPI_RW(*pBuf++);CSN = 1; // 关闭SPIreturn(status); ///********************//* 函数:void SetRX_Mode(void)/* 功能:数据接收配置/**********************/void SetRX_Mode(void){CE=0;SPI_RW_Reg(WRITE_REG + CONFIG, 0x0f); 接收CE = 1;inerDelay_us(130); // 延时不能太短}/**********************//* 函数: unsigned char nRF24L01_RxPacket(unsigned char* rx_buf)/* 功能:数据读取后放如 rx_buf 接收缓冲区中/***********************/unsigned char nRF24L01_RxPacket(unsigned char* rx_buf){unsigned char revale=0;sta=SPI_Read(STATUS); // 读取状态寄存其来判断数据接收状况if(RX_DR) // 判断是否接收到数据{CE = 0; //SPI 使能SPI_Read_Buf(RD_RX_PLOAD,rx_buf,TX_PLOAD_WIDTH);// read receive payload frombuffer// IRQ 收发完成中断响应, 16 位 CRC,主 FIFOSPI_RW_Reg(WRITE_REG+STATUS,sta); // 接收到数据后RX_DR,TX_DS,MAX_P都置高为1 通过写1 来清楚中断标志return revale;}/****************************/* 函数:void nRF24L01_TxPacket(unsigned char * tx_buf)/* 功能:发送tx_buf 中数据/****************************/void nRF24L01_TxPacket(unsigned char * tx_buf){CE=0; //StandBy I 模式SPI_Write_Buf(WRITE_REG + RX_ADDR_P0, TX_ADDRESS, TX_ADR_WIDTH); // 装载接收端地址SPI_Write_Buf(WR_TX_PLOAD, tx_buf, TX_PLOAD_WIDTH); // 装载数据// SPI_RW_Reg(WRITE_REG + CONFIG, OxOe); // IRQ 收发完成中断响应,16 位CRC 主发送CE=1; //置高CE激发数据发送inerDelay_us(1O);}//************************************ void main(void){uchar temp =O;init_NRF24LO1() ;nRF24LO1_TxPacket(TxBuf);Delay(6OOO);PO=OxBF;主函数// Transmit Tx buffer datawhile(1)nRF24L01_TxPacket(TxBuf); // Transmit Tx buffer dataLED=0;Delay(10000); // 可变SPI_RW_Reg(WRITE_REG+STATUS,0XFF);LED=1;Delay(8000);}。
1.源程序开发环境建立1.1程序编译软件编译软件用keil C51,打开安装文件,一路点击下一步即可完成。
1.2程序下载软件使用STC ISP下载软件。
2.源程序文件整体结构工程中,只有一个main.c文件,所有程序都写在这个文件里面。
Reg51.h是包含的头文件。
是不是非常简单!3.源程序执行流程无线数据处理程序:串口数据处理程序:4.串口配置函数void serial_open(void){SCON = 0X50;AUXR |= 0X04;TL2 = 0Xc0; // 9600TH2 = 0Xfd;AUXR|=0X10;}此串口配置函数,利用单片机内部的定时器2作为波特率发生器。
共用到4个寄存器:SCON AUXR TL2 TH2SM0和SM1的位决定串口工作的4种方式:程序中,SCON=0X50,即SM0=0 SM1=1,即串口工作在“方式1”;REN=1,允许串口接收数据。
TL2和TH2是定时器2的高位和低位寄存器。
程序中,首先AUXR|=0X40,最后AUXR|=0X10。
即首先把T2x12置1,然后把T2R置1。
即首先把定时器2设置为1T模式,然后把定时器打开。
5.串口发送数据函数void senddata(uchar data_buf){SBUF = data_buf;while(!TI);TI = 0;}用到了寄存器SBUF和寄存器SCON中的TI位。
SBUF寄存器是串口收发数据缓存寄存器,放到这个寄存器中的数据,会通过串口发送出去,接收到的串口数据,也会放到这个寄存器中。
也就是串口接收和发送都是使用这个寄存器。
程序中,SBUF=data_buf,就是把data_buf给了SBUF,单片机自动把SBUF里面的数据发送到串口。
TI是串口发送数据完成标志位,当串口发送完一个数据,此位置1,置位后,需要通过软件清0。
所以通过while(!TI),来检测TI位,达到检测串口是否发送完数据的目的。
nRF24L01无线通信系统设计学院:电子信息学院专业:电子信息工程姓名:学号:指导老师:摘要本文介绍了一套基于STM32微处理器,结合nRF24L01无线通信模块的无线数据传输系统。
nRF24L01无线通信系统是基于nRF24L01无线收发芯片,以STM32F103单片机为核心的半双工无线通信系统,文中详细阐述了该无线通信系统的硬件和软件设计。
该系统主要由一个nRF24L01无线通信模块组成,在硬件基础上,结合nRF24L01的特点,实现了两个nRF24L01无线通信模块之间的通信。
关键字:nRF24L0l;STM32;无线通信AbstractThis paper introduces a wireless communication system , a system based on STM32 microprocessor, combined with nRF24L01 wireless communication module . nRF24L01 wireless communication system is based on nRF2L01 wireless transceiver chip, half duplex wireless communication system with a control core of STM32F103 MCU.This paper describes the hardware and software design of the wireless communication system. The system mainly consists of a nRF24L01 wireless communication module, basing on the hardware and combining with the characteristics of nRF24L01, and realize the implementation of communication between two nRF24L01 wireless communication modules .Key words:nRF24L01;STM32;Wireless Communication前言无线方案适用于布线繁杂或者不允许布线的场合,目前在遥控遥测、门禁系统、无线抄表、小区传呼、工业数据采集、无线遥控系统、无线鼠标键盘等应用领域,都采用了无线方式进行远距离数据传输。
NRF24L01无线模块收发程序(实测成功多图)本模块是NRF24L01无线传输模块,用于无线传输数据,距离不远,一般只是能够满足小距离的传输,目测是4-5m,价格一般是4元左右,可以方便的买到。
51最小系统学习板就可以,当时是用了两块学习板,一块用于发送,一块用于接收。
小车也是比较容易购到的,四个端口控制两个电机,两个控制一个电机,当两个端口高低电平不同时电机就会转动,即为赋值1和0是电机转动,赋值可以用单片机作用,当然这是小车启动部分,前进后退左转右转就是你赋值0和1的顺序问题了。
整体思路是用发射端的按键控制小车,即为按键按下就前进,再按其他按键实现其他功能,本次程序是在用NRF24L01发射数据在接收端用1602显示的基础上改变。
下面是程序源码(有好几个文件,分别创建)1.//////////////////////////////////////////////////////////////// //////////////////////////////////////////////////////////////2.#include3.4.#include5.6.#include'1602.h'7.#include'delay.h'8.#include 'nrf24l01.h'9.#define uint unsigned int10.#define uchar unsigned char11.uint Weight_Shiwu=1234;12.unsigned char KeyScan(void);//键盘扫描13.// unsigned char KeyScan(void);//键盘扫描14.15.//#define KeyPort P016.sbit KEY1 = P0^0;17.sbit KEY2 = P0^1;18.sbit KEY3 = P0^2;19.sbit KEY4 = P0^3;20.sbit KEY5 = P0^4;21.void main()22.{23.// char TxDate[4];24.// LCD_Init(); //初始化液晶屏25.// LCD_Clear(); //清屏26.// NRF24L01Int(); //初始化LCD160227.// LCD_Write_String(4,0,'welcome');28.while(1)29.{30.KeyScan();31.32.}33.}34.35.36.37.38.unsigned char KeyScan(void)39.{40./******************************************************** /42.{43.if(!KEY1) //如果检测到低电平,说明按键按下44.{45.DelayMs(10); //延时去抖,一般10-20ms46.if(!KEY1) //再次确认按键是否按下,没有按下则退出47.{48.while(!KEY1);//如果确认按下按键等待按键释放,没有则退出49.{50.TxDate[0] = 1;//向左转51.TxDate[1] = 0;52.TxDate[2] = 1;53.TxDate[3] = 1;54.NRFSetTxMode(TxDate);//发送数据·55.while(CheckACK()); //检测是否发送完毕56.}57.}58.}59./******************************************************** /60.else if(!KEY2) //如果检测到低电平,说明按键按下61.{62.DelayMs(10); //延时去抖,一般10-20ms63.if(!KEY2) //再次确认按键是否按下,没有按下则退出64.{65.while(!KEY2);//如果确认按下按键等待按键释放,没有则退出66.{67.TxDate[0] = 1;//向右转69.TxDate[2] = 1;70.TxDate[3] = 0;71.NRFSetTxMode(TxDate);//发送数据72.while(CheckACK()); //检测是否发送完毕73.}74.}75.}76./******************************************************** /77.else if(!KEY3) //如果检测到低电平,说明按键按下78.{79.DelayMs(10); //延时去抖,一般10-20ms80.if(!KEY3) //再次确认按键是否按下,没有按下则退出81.{82.while(!KEY3);//如果确认按下按键等待按键释放,没有则退出83.{84.TxDate[0] = 1;//前进85.TxDate[1] = 0;86.TxDate[2] = 1;87.TxDate[3] = 0;88.NRFSetTxMode(TxDate);//发送数据89.while(CheckACK()); //检测是否发送完毕90.}91.}92.}93./******************************************************** /94.else if(!KEY4) //如果检测到低电平,说明按键按下96.DelayMs(10); //延时去抖,一般10-20ms97.if(!KEY4) //再次确认按键是否按下,没有按下则退出98.{99.while(!KEY4);//如果确认按下按键等待按键释放,没有则退出100.{101.TxDate[0] = 0;//后退102.TxDate[1] = 1;103.TxDate[2] = 0;104.TxDate[3] = 1;105.NRFSetTxMode(TxDate);//发送数据106.while(CheckACK()); //检测是否发送完毕107.}108.}109.}110.else if(!KEY5)111.{112.DelayMs(10);113.if(!KEY5)114.{115.while(!KEY5)116.{117.TxDate[0] = 1;118.TxDate[1] = 1;119.TxDate[2] = 1;120.TxDate[3] = 1;121.NRFSetTxMode(TxDate);122.while(CheckACK());123.}125.}126.}127.}1.//////////////////////////////////////////////////////////////// ///////////////////////////////////////////////////////2.#include3.4.#include5.6.#include'1602.h'7.#include'delay.h'8.#include 'nrf24l01.h'9.#define uint unsigned int10.#define uchar unsigned char11.uint Weight;12.sbit a = P2^0;13.sbit b = P2^1;14.sbit c = P2^2;15.sbit d = P2^3;16.void main()17.{18.LCD_Init(); //初始化液晶屏19.LCD_Clear(); //清屏20.*(RevTempDate+4)=*\0*;21.NRF24L01Int();22.while(1)23.{25.NRFSetRXMode();//设置为接收模式26.GetDate();//开始接受数;27.//Weight=RevTempDate[0]*1000+RevTempDate[1]*100+RevTemp Date[2]*10+RevTempDate[3];28.LCD_Write_Char(7,0,RevTempDate[0]+0x30);29.LCD_Write_Char(8,0,RevTempDate[1]+0x30);30.LCD_Write_Char(9,0,RevTempDate[2]+0x30);31.LCD_Write_Char(10,0,RevTempDate[3]+0x30);32. a = RevTempDate[0];//根据接受数据来设置高低电平(目测仅限传输1.0两种数值)33. b = RevTempDate[1];34. c = RevTempDate[2];35. d = RevTempDate[3];36.}37.}38.39.///////////////////////////////////////////////////////////// //////////////////////////////////////////////////////////////////////// //////////////1.#include2.3.#include 'nrf24l01.h'4.#define uchar unsigned char5.#define uint unsigned int6.sbit IRQ =P1^2;//输入7.sbit MISO =P1^3; //输入8.sbit MOSI =P1^1;//输出9.sbit SCLK =P1^4;//输出10.sbit CE =P1^5;//输出11.sbit CSN =P1^0;//输出12.uchar code TxAddr[]={0x34,0x43,0x10,0x10,0x01};//发送地址13./*****************状态标志*****************************************/14.uchar bdata sta; //状态标志15.sbit RX_DR=sta^6;16.sbit TX_DS=sta^5;17.sbit MAX_RT=sta^4;18./*****************SPI时序函数******************************************/19.uchar NRFSPI(uchar date)20.{21.uchar i;22.for(i=0;i<8;i++)>23.{24.if(date&0x80)25.MOSI=1;26.else27.MOSI=0; // byte最高位输出到MOSI28.date<=1;>29.SCLK=1;30.if(MISO) // 拉高SCK,nRF24L01从MOSI读入1位数据,同时从MISO输出1位数据31.date|=0x01; // 读MISO到byte最低位32.SCLK=0; // SCK置低33.}34.return(date); // 返回读出的一字节35.}36./**********************NRF24L01初始化函数*******************************/37.void NRF24L01Int()38.{39.DDelay(2);//让系统什么都不干40.CE=0; //待机模式141.CSN=1;42.SCLK=0;43.IRQ=1;44.}45./*****************SPI读寄存器一字节函数*********************************/46.uchar NRFReadReg(uchar RegAddr)47.{48.uchar BackDate;49.CSN=0;//启动时序50.NRFSPI(RegAddr);//写寄存器地址51.BackDate=NRFSPI(0x00);//写入读寄存器指令52.CSN=1;53.return(BackDate); //返回状态54.}55./*****************SPI写寄存器一字节函数*********************************/56.uchar NRFWriteReg(uchar RegAddr,uchar date)57.{58.uchar BackDate;59.CSN=0;//启动时序60.BackDate=NRFSPI(RegAddr);//写入地址61.NRFSPI(date);//写入值62.CSN=1;63.return(BackDate);64.}65./*****************SPI读取RXFIFO寄存器的值********************************/66.uchar NRFReadRxDate(uchar RegAddr,uchar *RxDate,uchar DateLen)67.{ //寄存器地址//读取数据存放变量//读取数据长度//用于接收68.uchar BackDate,i;69.CSN=0;//启动时序70.BackDate=NRFSPI(RegAddr);//写入要读取的寄存器地址71.for(i=0;i72.{73.RxDate[i]=NRFSPI(0);74.}75.CSN=1;76.return(BackDate);77.}78./*****************SPI写入TXFIFO寄存器的值**********************************/79.uchar NRFWriteTxDate(uchar RegAddr,uchar *TxDate,uchar DateLen)80.{ //寄存器地址//写入数据存放变量//读取数据长度//用于发送81.uchar BackDate,i;82.CSN=0;83.BackDate=NRFSPI(RegAddr);//写入要写入寄存器的地址84.for(i=0;i85.{86.NRFSPI(*TxDate++);87.}88.CSN=1;89.return(BackDate);90.}91./*****************NRF设置为发送模式并发送数据******************************/92.void NRFSetTxMode(uchar *TxDate)93.{//发送模式94.CE=0;95.NRFWriteTxDate(W_REGISTER+TX_ADDR,TxAddr,TX_A DDR_WITDH);//写寄存器指令+接收地址使能指令+接收地址+地址宽度96.NRFWriteTxDate(W_REGISTER+RX_ADDR_P0,TxAddr,TX_ADDR_WITDH);//为了应答接收设备,接收通道0地址和发送地址相同97.NRFWriteTxDate(W_TX_PAYLOAD,TxDate,TX_DATA_WIT DH);//写入数据98./******下面有关寄存器配置**************/99.NRFWriteReg(W_REGISTER+EN_AA,0x01); // 使能接收通道0自动应答100.NRFWriteReg(W_REGISTER+EN_RXADDR,0x01); // 使能接收通道0101.NRFWriteReg(W_REGISTER+SETUP_RETR,0x0a); // 自动重发延时等待250us+86us,自动重发10次102.NRFWriteReg(W_REGISTER+RF_CH,0x40); // 选择射频通道0x40103.NRFWriteReg(W_REGISTER+RF_SETUP,0x07); // 数据传输率1Mbps,发射功率0dBm,低噪声放大器增益104.NRFWriteReg(W_REGISTER+CONFIG,0x0e); // CRC使能,16位CRC校验,上电105.CE=1;106.DDelay(5);//保持10us秒以上107.}108./*****************NRF设置为接收模式并接收数据******************************/109.//主要接收模式110.void NRFSetRXMode()111.{112.CE=0;113.NRFWriteTxDate(W_REGISTER+RX_ADDR_P0,TxAddr,TX_ADDR_WITDH); // 接收设备接收通道0使用和发送设备相同的发送地址114.NRFWriteReg(W_REGISTER+EN_AA,0x01); // 使能接收通道0自动应答115.NRFWriteReg(W_REGISTER+EN_RXADDR,0x01); // 使能接收通道0116.NRFWriteReg(W_REGISTER+RF_CH,0x40); // 选择射频通道0x40117.NRFWriteReg(W_REGISTER+RX_PW_P0,TX_DATA_WIT DH); // 接收通道0选择和发送通道相同有效数据宽度118.NRFWriteReg(W_REGISTER+RF_SETUP,0x07); // 数据传输率1Mbps,发射功率0dBm,低噪声放大器增益*/119.NRFWriteReg(W_REGISTER+CONFIG,0x0f); // CRC使能,16位CRC校验,上电,接收模式120.CE = 1;121.DDelay(5);//保持10us秒以上122.}123./****************************检测应答信号******************************/124.uchar CheckACK()125.{ //用于发射126.sta=NRFReadReg(R_REGISTER+STATUS); // 返回状态寄存器127.if(TX_DS||MAX_RT) //发送完毕中断128.{129.NRFWriteReg(W_REGISTER+STATUS,0xff); // 清除TX_DS或MAX_RT中断标志130.CSN=0;131.NRFSPI(FLUSH_TX);//用于清空FIFO !!关键!!不然会出现意想不到的后果大家记住!!132.CSN=1;133.return(0);134.}135.else136.return(1);137.}138./******************判断是否接收收到数据,接到就从RX 取出*********************/139.//用于接收模式140.uchar NRFRevDate(uchar *RevDate)141.{142.uchar RevFlags=0;143.sta=NRFReadReg(R_REGISTER+STATUS);//发送数据后读取状态寄存器144.if(RX_DR) // 判断是否接收到数据145.{146.CE=0; //SPI使能147.NRFReadRxDate(R_RX_PAYLOAD,RevDate,RX_DATA_WI TDH);// 从RXFIFO读取数据148.RevFlags=1; //读取数据完成标志149.}150.NRFWriteReg(W_REGISTER+STATUS,0xff); //接收到数据后RX_DR,TX_DS,MAX_PT都置高为1,通过写1来清楚中断标151.return(RevFlags);152.}153.void DDelay(uint t)154.{155.uint x,y;156.for(x=t;x>0;x--)157.for(y=110;y>0;y--);158.}159.///////////////////////////////////////////////////////////// ///////////////////////////////////////////1.#include 'delay.h'2./*------------------------------------------------延时函数,含有输入参数 unsigned char t,无返回值4.unsigned char 是定义无符号字符变量,其值的范围是5.0~255 这里使用晶振12M,精确延时请使用汇编,大致延时6.长度如下 T=tx2+5 uS7.------------------------------------------------*/8.void DelayUs2x(unsigned char t)9.{10.while(--t);11.}12./*------------------------------------------------13.mS延时函数,含有输入参数 unsigned char t,无返回值14.unsigned char 是定义无符号字符变量,其值的范围是15.0~255 这里使用晶振12M,精确延时请使用汇编16.------------------------------------------------*/17.void DelayMs(unsigned char t)18.{19.20.while(t--)21.{22.//大致延时1mS23.DelayUs2x(245);24.DelayUs2x(245);25.26.}27.}28.///////////////////////////////////////////////////////////// //////////////////////////////1.下面是接收的NRF24L01的程序。
USB串口无线模块的配置说明带USB接口的模块直接插电脑进行配置,不带USB接口的模块得借助USB转串口进行配置;(如下图所示)1、USB转串口模块以及带USB的无线驱动模块需要安装CH341驱动;(文件在“CH341>>DRIVER>SETUP.EXE)2、波特率默认设置为9600(带USB与不带USB的),波特率的选择范围为:2400-115200,具体,请看配置参数对应的描述;3、配置时,必须在断电的情况下,插上跳线帽,再从新上电;(注意:不能上着电的情况下,插跳线帽!)4、配置完成之后,必须得把跳线帽拔掉;(注意:必须得在断电的情况下拔,然后,再重新上电!)5、配置的格式为8个字节:“0X00+每个数据包的长度+0X01+频道+0X02+工作模式+单向/双向运行模式+‘波特率’”注意:1、必须插上跳线帽进行配置,配置完之后,必须拔掉跳线帽才能正常使用;(配置时,在上电前就得插上跳线帽;当然,正常使用时也得在断电的情况下,拔跳线帽,再重新上电)2、串口调试助手发送数据的格式为:十六进制;3、USB转串口模块的TX,RX与NRF24L01驱动模块(无USB的)的TX,RX要交叉相连,即一方的TX与另外一方的RX相连,然后,一方的RX与另外一方的TX相连;4、两个模块的数据长度,频道得设置成一样,否则工作不正常;数据的长度选择范围:(单向工作模式最小为1个字节,最大为32个字节)(双向工作模式最小为2个字节,最大为32个字节);频道的选择范围为:从0X00到0X7F 选择一个;(即0-127,从0开始,2的6次方)5、同一个实验室的,为了不互相影响,得把频道设置成不一样,否则会互相干扰,;6、“工作模式”只分两种:TX模式(0X01)和 RX模式(0X00),注意:两个模块的工作模式不能一样,必须得其中一个模块为TX模式,另外一个模块为RX模式,否则,不能实现两个模块的无线通信;7、单向/双向运行模式,0X01:模块运行在双向通信模式,0X00:模块运行在单向通信模式;双向模式相对单向模式而言,双向模式中,可以通过发送AT 指令来切换方向,具体请看双向模式的使用要求;8、波特的选择,从小到大分别为:2400(0X07),4800(0X08), 9600(0X00),14400(0X01), 19200(0X02), 38400(0X03), 56000(0X04), 57600(0X05), 115200(0X06);9、数据的长度得选择适中,串口调试助手(单片机)的发送频率也得选择适中;单向运行模式:(注意:配置的时候记得插上跳线帽,否则,配置不成功!)(图1) (图2) 配置参数为:0X00+0X06+0X01+0X78+0X02+0X01+0X00+0X06(如图1所示)这组配置参数的意思是:单个数据包的数据长度为 6个字节,频道选择120(0X78),让模块的工作模式为TX模式(0X01),模块运行在单向通信模式(0X00),波特率将选择115200(0X06)。
一、引脚排布及功能图1 引脚排布图2 引脚功能说明二、工作模式图3 工作模式工作模式由CONFING寄存器位0及位1和CE共同决定(1)如发射模式则设置CE置1及设置CONFIG寄存器:SPI_Write_Reg(WRITE_REG + CONFIG, 0x0e); //16位CRC、上电、发射模式(2)如接收模式则设置CE置1豚设置CONFIG寄存器:SPI_Write_Reg(WRITE_REG + CONFIG, 0x0f); //16位CRC、上电,接收模式图4 模式设置三、工作原理(1)发射数据时:首先将nRF24L01配置为发射模式:接着把发射地址即接收机的地址TX_ADDR和有效数据TX_PLD按照时序由SPI口写入nRF24L01缓存区(FIFO),TX_PLD必须在CSN (即片选)为低时连续写入,而TX_ADDR在发射时写入一次即可,然后CE置为高电平并保持至少10μs,延迟130μs后发射数据;若自动应答开启,那么nRF24L01在发射数据后立即进入接收模式,接收应答信号(自动应答接收地址应该与接收节点地址TX_ADDR 一致,即接收方以发送过来的原地址向发送方发送收到应答信号)。
如果收到应答,则认为此次通信成功,TX_DS置高,同时数据TX_PLD从TX FIFO中清除;若未收到应答,则自动重新发射该数据(自动重发已开启),若重发次数(ARC)达到上限,MAX_RT置高,TX FIFO中数据保留以便再次重发,当然也可以清除X FIFO中的数据(在到达最大重发次数并引发中断后,在没有清除MAX_RT之前,任何数据都不能发送。
每次发生MAX_RT 中断,PLOS_CNT计数器都会加1,用于统计丢包数);MAX_RT或TX_DS置高时,使IRQ 变低,产生中断,通知MCU。
最后发射成功时,若CE为低则nRF24L01进入空闲模式1;若发送堆栈中有数据且CE为高,则进入下一次发射;若发送堆栈中无数据且CE为高,则进入空闲模式2。