基于正四棱锥结构的机器人声源定位系统研究
- 格式:pdf
- 大小:1.26 MB
- 文档页数:5



机器人声源定位系统实验设计与实现宋亚男;陈海辉;徐荣华;宋子寅【摘要】Based on the embedded system,the design of the robot acoustic source positioning system is completed,and the microphone array and acquisition circuit are designed.On the basis of the robot acoustic source position method of the cross correlation function estimation time delay method,the robot acoustic source positioning is realized.The demonstration experiment for the robot acoustic source positioning and semi-open experiment for the robot acoustic source positioning are designed and realized.The experimental results reach the goal of the expected experimental design.%基于嵌入式系统完成了机器人声源定位系统的设计,设计了麦克风阵列和采集电路,并基于互相关函数估计时延法的机器人声源定位算法,实现了机器人声源定位;设计并实现了机器人声源定位演示实验和机器人声源定位半开放实验,实验效果达到预期实验设计的目标.【期刊名称】《实验技术与管理》【年(卷),期】2018(035)003【总页数】4页(P47-49,54)【关键词】声源定位系统;机器人;实验设计【作者】宋亚男;陈海辉;徐荣华;宋子寅【作者单位】广东工业大学自动化学院,广东广州 510006;广东工业大学自动化学院,广东广州 510006;广东工业大学自动化学院,广东广州 510006;广东工业大学实验教学部,广东广州 510006【正文语种】中文【中图分类】TP242;G642.423在进行本科教育过程中,参与课外科研和毕业设计环节的学生以课题形式参与实验室建设,初见成效。
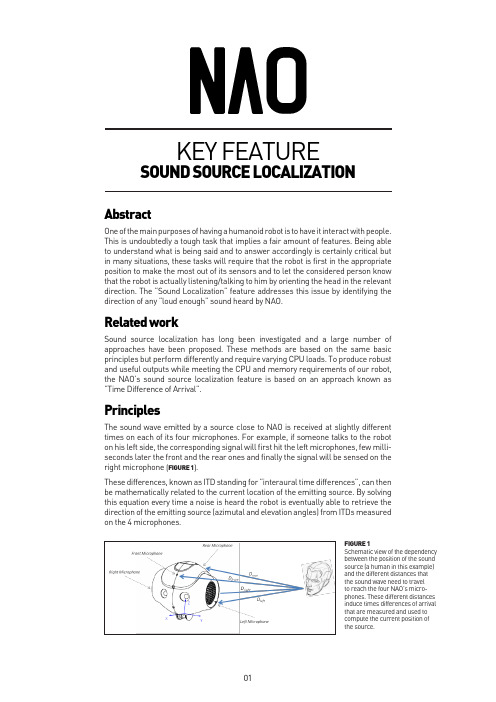
AbstractOne of the main purposes of having a humanoid robot is to have it interact with people. This is undoubtedly a tough task that implies a fair amount of features. Being able to understand what is being said and to answer accordingly is certainly critical but in many situations, these tasks will require that the robot is first in the appropriate position to make the most out of its sensors and to let the considered person know that the robot is actually listening/talking to him by orienting the head in the relevant direction. The “Sound Localization” feature addresses this issue by identifying the direction of any “loud enough” sound heard by NAO.Related workSound source localization has long been investigated and a large number of approaches have been proposed. These methods are based on the same basic principles but perform differently and require varying CPU loads. To produce robust and useful outputs while meeting the CPU and memory requirements of our robot, the NAO’s sound source localization feature is based on an approach known as “Time Difference of Arrival”.PrinciplesThe sound wave emitted by a source close to NAO is received at slightly different times on each of its four microphones. For example, if someone talks to the robot on his left side, the corresponding signal will first hit the left microphones, few milli-seconds later the front and the rear ones and finally the signal will be sensed on the right microphone (FIGURE 1).These differences, known as ITD standing for “interaural time differences”, can then be mathematically related to the current location of the emitting source. By solving this equation every time a noise is heard the robot is eventually able to retrieve the direction of the emitting source (azimutal and elevation angles) from ITDs measuredon the 4 microphones.FIGURE 1Schematic view of the dependency between the position of the sound source (a human in this example) and the different distances that the sound wave need to travel to reach the four NAO’s micro-phones. These different distances induce times differences of arrival that are measured and used to compute the current position of the source.KEY FEATURE SOUND SOURCE LOCALIZATIONPerformancesThe angles provided by the NAO’s sound source localization engine match the real position of the source with an average accuracy of 20 degrees, which is satisfactoryin many practical situations. Note that the maximum theoretical accuracy dependson the microphones’ spatial configuration and on the sample rate of the measured signal, and is about 10 degrees on NAO.The distance separating NAO and a sound source successfully located can reachseveral meters depending on the situation (reverberation, background noise, etc…).Once launched, this feature uses 10% of the CPU constantly and up to 20% for few milliseconds when the location of a sound is being computed.LimitationsThe performance of NAO’s sound source localization is limited by how clearly thesound source can be heard with respect to background noise. Noisy environments naturally tend to decrease the reliability of the module outputs.It will also detect and locate any “loud sounds” without being able by itself to filterout sound source that are not humans.Finally, only one sound source can be located at a time. The module can behave in aless reliable manner if NAO faces several loud noises at the same time. He will likelyonly output the direction of the loudest source.How does it work?This feature is available as a NaoQi module named “ALAudioSourceLocalization”which provides a C++ and Python API (application programming interface) thatallows precise interactions from a python script or a NaoQi module.Two boxes in Choregraphe are also available that allow an easy use of the featureinside a behavior:● The box “Sound Loc.” provides the output (angles and level of confidence) of thesound localization module without taking any further actions.● The box “Sound Tracker” uses these outputs to make NAO’s head turn in the appropriate direction.FIGURE 2An example of a behavior usingthe «Sound Tracker» box toorientate NAO’s head so thatthe «Face Recognition» box canactually perform its recognition.How are people using it?Here are some possible applications (from the simplest to the more ambitious ones) that can be built from NAO’s ability to locate sound sources.- Using the “Sound Source Localization” to have a person enter the camera field of view (as shown in the above example). This allows subsequent vision based features to work on relevant images (images showing a person for example). This is consequently of interest for these specific tasks:● Human Detection, Tracking and Recognition● Noisy Objects Detection, Tracking and Recognition- “Sound Source Localization” can be used to strengthen the Signal/Noise ratio in a specific direction - this is known as Audio Source Separation – and can critically enhance subsequent audio based algorithms such as:● Speech Recognition in a specific direction● Speaker Recognition in a specific direction- Theses possible applications can also be mixed together making NAO’s sound source localization the basic block for sophisticated applications such as:● Remote Monitoring / Security applications (NAO’s could track noises in an empty flat, take pictures and record sounds in relevant directions, etc…)● Entertainment applications (by knowing who speaks and understanding what is being said, NAO could easily take part in a great variety of games with humans.)。

高精度声源定位技术的研究进展声源定位技术是一项关键的技术,广泛应用于各个领域,如音频处理、通信系统、无人机导航等。
近年来,随着科技的不断进步,高精度声源定位技术也得到了长足的发展。
本文将介绍该技术的研究进展,并探讨其在实际应用中的潜力。
首先,高精度声源定位技术的研究主要集中在两个方面:传感器阵列设计和信号处理算法。
传感器阵列是实现声源定位的关键组成部分,其设计直接影响到定位精度。
目前,常见的传感器阵列包括线性阵列、圆形阵列和球形阵列等。
研究人员通过对传感器阵列的优化设计,提高了定位的准确性和稳定性。
其次,信号处理算法也是高精度声源定位技术中不可或缺的一环。
传统的声源定位算法主要基于波束形成原理,通过对接收到的声波信号进行处理,确定声源的位置。
然而,由于环境噪声和多路径效应的存在,传统算法在复杂环境下的定位精度有限。
因此,研究人员提出了一系列新的信号处理算法,如基于卷积神经网络的声源定位算法、基于深度学习的声源定位算法等。
这些算法通过对大量数据的学习和分析,提高了定位的准确性和鲁棒性。
除了传感器阵列设计和信号处理算法,高精度声源定位技术的研究还涉及到其他方面的内容。
例如,研究人员通过引入多模态信息,如视频、惯性传感器等,提高了声源定位的精度。
此外,他们还研究了声源定位与其他相关技术的结合,如目标跟踪、声纹识别等,进一步拓展了该技术的应用范围。
高精度声源定位技术在实际应用中具有广阔的前景。
首先,它可以应用于智能音频处理领域。
通过准确地定位声源,可以实现自适应降噪、声源增强等功能,提高音频质量和用户体验。
其次,该技术可以应用于通信系统中。
通过定位对方的声源,可以实现声纹识别、定向通信等功能,提高通信的安全性和效率。
此外,高精度声源定位技术还可以应用于无人机导航、智能家居等领域,为人们的生活带来更多便利。
尽管高精度声源定位技术已经取得了一定的研究进展,但仍存在一些挑战和问题。
首先,复杂环境下的定位精度仍然有待提高。
基于移动机器人的声源定位系统
刘红宁;李志尊
【期刊名称】《四川兵工学报》
【年(卷),期】2009(30)4
【摘要】介绍了一种协助移动机器人平台搜寻目标方向的声源定位系统.这种听觉系统的最终目标是服务于移动机器人,它所提供的听觉信息再匹配视觉信息,将指导机器人的运动路径.此系统基于时延估计算法,在这种算法中,首先通过能量探测声音起点,然后通过广义互相关法计算时延以确定声源的方向和位置.但是,如果听觉系统麦克风阵列的安装位置离机器人很近,由于采集声源时被马达噪音干扰,将会导致计算结果产生误差.为了克服以上问题,作者改进了广义互相关法.实验表明,本文中提出的声源定位系统可有效应用于移动机器人平台.
【总页数】3页(P77-79)
【作者】刘红宁;李志尊
【作者单位】军械工程学院,基础部机械设计教研室,石家庄,050003;军械工程学院,基础部机械设计教研室,石家庄,050003
【正文语种】中文
【中图分类】TJ0;TP242.6+3
【相关文献】
1.基于主动探测的移动机器人声源目标距离测定方法
2.移动机器人基于改进粒子滤波的声源目标跟踪研究
3.基于六元空间阵列的声源定位系统实现
4.一种基于互相关算法的二维声源定位系统
5.基于麦克风阵列的声源定位系统研究
因版权原因,仅展示原文概要,查看原文内容请购买。
基于传声器阵列的机器人声源定位系统宫玉琳;大化【期刊名称】《长春理工大学学报(自然科学版)》【年(卷),期】2016(039)003【摘要】With the development of computer technology and signal processing technology,all kinds of robots with spe-cial functions are applied to the production and life of people. The auditory system can make up for the deficiency ex-isting in the robot vision system,the robot in the dark or obstructions of environment,using sound information percep-tion environment in the presence of the target,and the positioning,robot assisted work,especially in the field of disas-ter rescue,military and other fields,sound source localization system has a unique advantage. The sound source local-ization robot system for research,design based on microphone array sound source localization robot system by four ele-ment planar microphone array, using the generalized cross correlation algorithm, to achieve the sound source localiza-tion. Experimental results show that the system has high positioning accuracy,with a high practical value.%随着计算机技术和信号处理技术的发展,各种具有特殊功能的机器人应用到人们的生产生活中。
一种简单的三维空间声源定位方法
龚惠哲
【期刊名称】《华南理工大学学报:自然科学版》
【年(卷),期】2007(035)B10
【摘要】为了简化使用话筒阵列对空间声源的定位,文中提出了一种简单的三维空间声源定位方法.该方法在直角坐标轴上放置4个麦克风,声源到达麦克风对之间的时间差可以由测量接收信号的互相关函数得到.由到达时间差和一个近似的锥模型可以很容易得到声源相对于3个坐标轴的方位角,从而转换成极坐标系中的方位角和仰角.相比较已有方法:该方法具有简单易行、计算量小的显著优点.【总页数】3页(P70-72)
【作者】龚惠哲
【作者单位】华南理工大学亚热带建筑科学国家重点实验室,广东广州510640【正文语种】中文
【中图分类】TU112
【相关文献】
1.一种简单的三维空间声源定位方法 [J], 龚惠哲
2.一种无线传感器网络环境下多机器人协作式声源定位方法 [J], 陈妮;何华光;叶进
3.一种用于分布式阵列的球谐波域声源定位方法 [J], 韩欣宇; 吴鸣; 杨军; 张喆
4.一种基于相位平均的旋转声源高分辨率定位方法 [J], 初宁;黄乾;余亮;宁岳;徐建锋;吴大转
5.一种适用浅海声源的多阵列直接定位方法 [J], 王冠群;张春华;李宇;张扬帆
因版权原因,仅展示原文概要,查看原文内容请购买。