转子平衡的原理和方法
- 格式:ppt
- 大小:359.50 KB
- 文档页数:22
风机转子动平衡——两点平衡计算法原理。
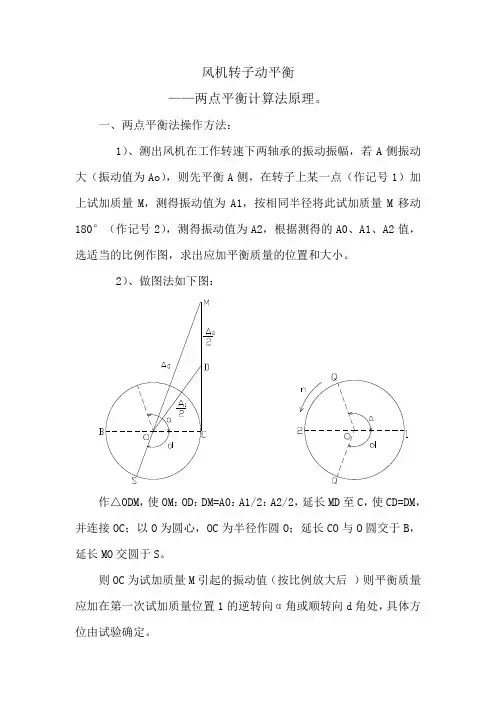
一、两点平衡法操作方法:1)、测出风机在工作转速下两轴承的振动振幅,若A侧振动大(振动值为Ao),则先平衡A侧,在转子上某一点(作记号1)加上试加质量M,测得振动值为A1,按相同半径将此试加质量M移动180°(作记号2),测得振动值为A2,根据测得的A0、A1、A2值,选适当的比例作图,求出应加平衡质量的位置和大小。
2)、做图法如下图:作△ODM,使OM:OD:DM=A0:A1/2:A2/2,延长MD至C,使CD=DM,并连接OC;以O为圆心,OC为半径作圆O;延长CO与O圆交于B,延长MO交圆于S。
则OC为试加质量M引起的振动值(按比例放大后)则平衡质量应加在第一次试加质量位置1的逆转向α角或顺转向d角处,具体方位由试验确定。
二、两点平衡计算法:1、具体操作同上。
2、计算原理如下:1)、根据平行四边形法则做矢量图如下:2)、求出试重块M应产生的振幅在三角形oca中Cosα=(A²+X²-C²)/2AX在三角形0ab中cos(л-α)=(A²+X² -B²)/2AX 因为:cosα+cos(л-α)=0得:(A²+X²-C²)/2AX +(A²+X² -B²)/2AX=0(2A²+2X²-C² -B²)/2AX=02A²/2AX+2X²/2AX-C²/2AX -B²/2AX=02X²/2AX=C²/2AX +B²/2AX-2A²/2AX2X²/2AX=(C² +B²-2A²)/2AX2X²=C² +B²-2A²X²=(C² +B²-2A²)/2X=√[(C² +B²-2A²)/2]3)、求得试重块M应产生的振幅后。
转子动平衡国家标准转子动平衡是指在旋转机械中,为了减少振动和噪音,提高设备运行的稳定性和安全性,需要对转子进行动平衡处理。
转子动平衡国家标准是对转子动平衡技术和方法进行规范,以确保转子动平衡的有效性和可靠性。
本文将对转子动平衡国家标准进行介绍和解析,以便读者更好地理解和应用该标准。
首先,转子动平衡国家标准主要包括了转子动平衡的基本原理、技术要求、平衡方法和平衡设备等内容。
其中,转子动平衡的基本原理是通过在转子上添加试重块,使得转子在旋转时振动达到最小值,从而实现动平衡。
技术要求包括了对转子质量、转子几何形状、转子支撑刚度和转子支撑阻尼等方面的要求。
平衡方法则是指在实际操作中,如何根据转子的振动特性和试重块的位置来进行动平衡处理。
平衡设备则是指用于进行转子动平衡处理的设备和工具,包括平衡机、试重块和测量仪器等。
其次,转子动平衡国家标准的制定和实施对于提高转子动平衡的技术水平和标准化程度具有重要意义。
通过遵循国家标准,可以确保转子动平衡处理的准确性和可靠性,减少设备运行过程中的振动和噪音问题,延长设备的使用寿命,提高设备的安全性和稳定性。
同时,国家标准的实施也有利于促进转子动平衡技术的发展和推广,提高行业内从业人员的技术水平和专业素养,推动整个行业的健康发展。
最后,作为转子动平衡的从业人员,我们应当深入学习和理解转子动平衡国家标准,严格按照标准要求进行转子动平衡处理,确保设备运行的稳定性和安全性。
同时,我们也应当积极参与国家标准的修订和完善工作,提出自己的意见和建议,为转子动平衡国家标准的不断提高贡献自己的力量。
总之,转子动平衡国家标准是对转子动平衡技术和方法进行规范的重要文件,对于提高转子动平衡的技术水平和标准化程度具有重要意义。
我们应当深入学习和理解该标准,严格按照标准要求进行转子动平衡处理,为设备运行的稳定性和安全性贡献自己的力量。
转子动平衡技术的原理及常用方法宝子,今天咱们来唠唠转子动平衡技术这个超有趣的东西哦。
一、原理。
你想啊,转子在转动的时候,如果它不平衡,那就像一个人走路一条腿长一条腿短似的,肯定会晃悠。
转子动平衡的原理呢,简单说就是要让转子在转动的时候,各个方向上的力都能相互抵消,达到一种和谐的状态。
从科学角度讲,转子不平衡会产生离心力,这个离心力会让整个系统振动、噪声增大,还可能让设备磨损得特别快呢。
而动平衡就是要找到转子上不平衡的质量分布点,然后通过在合适的位置添加或者去掉一些质量,让离心力相互平衡,就像给走路不稳的人穿上合适的鞋子或者调整脚步一样。
二、常用方法。
1. 现场平衡法。
这就像是在设备的“老家”给它治病。
在转子正常工作的地方,直接测量振动的情况,然后算出不平衡量和位置。
这种方法特别实用,不用把转子拆下来搬到专门的地方去平衡。
就好比医生到病人家里看病,直接根据病人在家的状态开药一样方便。
不过呢,现场的干扰因素可能比较多,就像家里可能比较杂乱影响医生判断一样。
2. 平衡机平衡法。
这是把转子拆下来,放到专门的平衡机上去检测和调整。
平衡机就像是一个超级精密的体检中心。
它能很准确地测量出转子的不平衡情况。
就像把人带到医院做全面检查一样,能得到很精确的数据。
然后根据这些数据,在转子上合适的地方加或者减重量。
这种方法精度高,但是需要把转子拆下来,有时候就像给人做手术,有点小麻烦呢。
总之呢,转子动平衡技术对很多设备的正常运行都超级重要哦。
不管是大的发电机转子,还是小的风扇转子,都离不开它。
这就像不管是大人还是小孩,都得保持身体平衡才能稳稳地走路呀。

风机转子动平衡——两点平衡计算法原理。
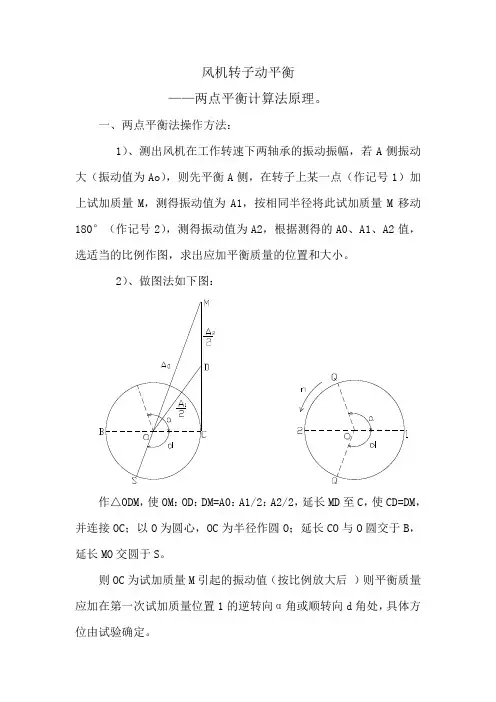
一、两点平衡法操作方法:1)、测出风机在工作转速下两轴承的振动振幅,若A侧振动大(振动值为Ao),则先平衡A侧,在转子上某一点(作记号1)加上试加质量M,测得振动值为A1,按相同半径将此试加质量M移动180°(作记号2),测得振动值为A2,根据测得的A0、A1、A2值,选适当的比例作图,求出应加平衡质量的位置和大小。
2)、做图法如下图:作△ODM,使OM:OD:DM=A0:A1/2:A2/2,延长MD至C,使CD=DM,并连接OC;以O为圆心,OC为半径作圆O;延长CO与O圆交于B,延长MO交圆于S。
则OC为试加质量M引起的振动值(按比例放大后)则平衡质量应加在第一次试加质量位置1的逆转向α角或顺转向d角处,具体方位由试验确定。
二、两点平衡计算法:1、具体操作同上。
2、计算原理如下:1)、根据平行四边形法则做矢量图如下:2)、求出试重块M应产生的振幅在三角形oca中Cosα=(A²+X²-C²)/2AX在三角形0ad中cos(л-α)=(A²+X² -B²)/2AX 因为:cosα+cos(л-α)=0得:(A²+X²-C²)/2AX +(A²+X² -B²)/2AX=0(2A²+2X²-C² -B²)/2AX=02A²/2AX+2X²/2AX-C²/2AX -B²/2AX=02X²/2AX=C²/2AX +B²/2AX-2A²/2AX2X²/2AX=(C² +B²-2A²)/2AX2X²=C² +B²-2A²X²=(C² +B²-2A²)/2X=√[(C² +B²-2A²)/2]3)、求得试重块M应产生的振幅后。
转子平衡的原理和方法转子平衡是在旋转机械中重要的工程问题之一,它的目的是使转子在高速运转时减小或消除因不平衡引起的振动和噪声,提高机械的运转稳定性和可靠性。
本文将介绍转子平衡的原理和常用的方法。
不平衡是指转子质量分布不均匀,导致转子在旋转过程中产生的力矩与重力不平衡,使得转子发生振动,甚至损坏机械设备。
转子平衡的原理是通过调整转子上的质量分布,使得转子的重力与离心力平衡,达到减小振动的目的。
1.静平衡:静平衡是指只考虑转子在整体上的重心位置,不考虑转子在旋转运动中受到的离心力。
静平衡的方法有:(1)质量平移法:通过向转子上添加或去除质量来调整平衡。
可以通过冲撞法测量不平衡力和相位,然后向相位相反方向添加或去除质量来达到平衡。
(2)角度添加法:在转子上通过关键角度的添加或去除质量来达到平衡。
通常是通过在转子上固定一个调整质量,然后根据试验和计算确定关键角度来进行调整。
2.动平衡:动平衡是指考虑转子在旋转运动中产生的离心力,通过在转子上调整质量分布来达到平衡。
动平衡的方法有:(1)加重方法:在转子的不平衡位置上添加补偿质量,使得转子的重心与轴线重合。
可以通过在试验台上对转子进行试验,根据不平衡力的大小和相位确定补偿质量的位置和大小。
(2)移动方法:通过移动转子上的质量来达到平衡。
可以通过试验台上的试验来测量不平衡力和相位,然后根据试验结果进行调整。
动平衡方法的选择主要取决于转子的形状和结构,以及不平衡力和相位的测量精度要求。
总结:转子平衡是保证旋转机械运转稳定性和可靠性的关键问题。
静平衡和动平衡是常用的转子平衡方法,静平衡主要通过质量平移和角度添加来实现,动平衡主要通过加重和移动来实现。
选择合适的平衡方法需要考虑转子的形状和结构,以及不平衡力和相位的测量精度要求。
通过转子平衡可以减小或消除不平衡引起的振动和噪声,提高机械设备的运转稳定性和可靠性。
技术讲课教案主讲人:罗仁波培训题目:《转子动平衡——原理、方法和标准》培训目的:多种原因会引起转子某种程度的不平衡问题,分布在转子上的所有不平衡矢量的和可以认为是集中在“重点”上的一个矢量,动平衡就是确定不平衡转子重点的位置和大小的一门技术,然后在其相对应的位置处移去或添加一个相同大小的配重。
内容摘要:动平衡前要确认的条件:1.振动必须是因为动不平衡引起。
并且要确认动不平衡力占振动的主导。
2.转子可以启动和停止。
3.在转子上可以添加可去除重量。
培训教案:第一章不平衡问题种类为了以最少的启停次数,获得最佳的平衡效果,我们不仅要认识到动不平衡问题的类型(静不平衡、力偶不平衡、动不平衡,如下图),而且还要知道转子的宽径比及转速决定了采用单平面、双平面还是多平面进行动平衡操作。
同时也要认识到转子是挠性的还是刚性的。
●●刚性转子与挠性转子✧对于刚性转子,任何类型的不平衡问题都可以通过任选的二个平面得以平衡。
✧对于挠性转子,当在一个转速下平衡好后,在另一个转速下又会出现不平衡问题。
当一个挠性转子首先在低于它的70%第一监界转速下,在它的两端平面内加配重平衡好后,这两个加好的配重将补偿掉分布在整个转子上的不平衡质量,如果把这个转子的转速提高到它的第一临界转速的70%以上,这个转子由于位于转子中心处的不平衡质量所产生的离心力的作用,而产生变形,如图10所示。
由于转子的弯曲或变形,转子的重心会偏离转动中心线,而产生新的不平衡问题,此时在新的转速下又有必要在转子两端的平衡面内重新进行动平衡工作,而以后当转子转速降下来后转子又会进入到不平衡状态。
为了能在一定的转速范围内,确保转子都能处在平衡的工作状态下,唯一的解决办法是采用多平面平衡法。
✧挠性转子平衡种类1.如果转子只是在一个工作转速下运转,小量的变形不会产生过快的磨损或影响产品的质量,那么可以在任意二个平面内进行平衡,使轴承的振动降低到最小即可。
2.如果一个挠性转子,只是在一个工作转速下工作,但是将转子的变形量降低到最小是极其重要的,这时最好采用多平面动平衡修正。
电动机转子动平衡标准电动机转子动平衡是指在转子转动时,使转子的质量中心与转轴的几何轴线重合,同时使转子在转动时不产生振动。
电动机转子动平衡的标准是为了保证电动机在运行过程中能够稳定可靠地工作,减少振动和噪音,延长电动机的使用寿命。
电动机转子动平衡标准的制定是为了保证电动机在设计、制造和使用过程中的安全性、可靠性和稳定性。
根据国家标准和行业规范,电动机转子动平衡标准主要包括以下几个方面:1. 质量不平衡的限制,电动机转子的质量不平衡是指转子的质量中心与转轴的几何轴线不重合,导致转子在转动时产生振动。
根据国家标准,电动机转子的质量不平衡应控制在一定范围内,以确保电动机在运行时不产生过大的振动。
2. 转子动平衡的方法,电动机转子动平衡的方法主要包括静平衡和动平衡两种。
静平衡是指在转子静止时,通过在转子上添加或去除质量来使转子的质量中心与转轴的几何轴线重合;动平衡是指在转子转动时,通过在转子上添加或去除质量来使转子的质量中心与转轴的几何轴线重合。
3. 平衡质量等级,根据国家标准,电动机转子的平衡质量等级分为G等级、F等级和H等级。
其中,G等级是最高精度要求,适用于高速旋转的转子;F等级是一般精度要求,适用于中速旋转的转子;H等级是较低精度要求,适用于低速旋转的转子。
4. 平衡质量的检测方法,电动机转子的平衡质量可以通过静平衡试验和动平衡试验来进行检测。
静平衡试验是在转子静止时,通过测量转子的质量中心和转轴的几何轴线的偏差来确定转子的质量不平衡;动平衡试验是在转子转动时,通过振动传感器和相位检测仪来测量转子的振动情况,从而确定转子的质量不平衡。
5. 平衡质量的修正方法,一旦确定了电动机转子的质量不平衡,就需要采取相应的修正方法来进行平衡。
修正方法主要包括在转子上添加平衡块或去除多余质量,以达到转子的动平衡要求。
电动机转子动平衡标准的制定和执行,可以有效地提高电动机的运行效率和稳定性,减少振动和噪音,延长电动机的使用寿命。
11.2 刚性转子平衡的原理与方法11.2.1静平衡1、静平衡的概念当转子的宽度b与直径D之比(宽径比)小于0.2时,例如砂轮、飞轮、齿轮、带轮和盘形凸轮等,由于其轴向尺寸较小,故可近似地认为其所有的质量都分布在垂直于轴线的同一个平面内。
如果转子的质心位置不在回转轴线上,则当转子转动时,其偏心质量就会产生离心惯性力,从而在运动副中引起附加动压力。
当转子的支承阻力很小时,在重力的作用下,质心将处于回转轴线下方,因为这种不平衡现象在转子静止时就能显示出来,故称为静不平衡。
如果转子的质心位于回转轴线上就称为静平衡。
刚性转子的静平衡就是通过在刚性转子上加减平衡质量的方法,使其质心回到回转轴线上,从而使转子的惯性力得到平衡的一种措施。
2、静平衡的设计当转子的结构不对称时,为了消除离心惯性力的影响,设计时应首先根据其结构确定各偏心质量的大小和方位,然后计算出为平衡偏心质量所产生的惯性力而应加平衡质量的大小和方位,并将该平衡质量加于转子上,以使所设计的转子理论上达到静平衡。
这一过程称为刚性转子的静平衡设计。
图11-1所示为一盘状转子,其偏心质量分别为m l、m2、m3及m4,回转半径分别为r1、r2、r3、r4,方位如图。
当此转子以角速度ω等速回转时,各偏心质量所产生的离心惯性力分别为F1、F2、F3、F4,它们组成一个平面汇交力系。
根据平面汇交力系的合成原理,为平衡这些离心惯性力,可在此转子上加上平衡质量m,其回转半径为r,使它所产生的离心惯性力F与F1、F2、F3、F4相平衡,亦即使不平衡惯性力的矢量和为零,即:12340F F F F F++++=(11-1)则有: 02424323222121=++++=→→→→→→∑r m r m r m r m r m F ωωωωω 或表示为: 022=+→→∑r m r m i iωω (11-2) 消去ω得:0=+→→∑r m r m ii (11-3) 式中i i r m →叫做质径积,它相对地表示各偏心质量在同一转速下所产生的离心惯性力的大小和方向。

转子动平衡原理方法和标准一、转子动平衡原理方法转子动平衡是指通过调整转子的质量分布,使转子在高速旋转时减小振动,提高转子的平衡性能。
转子动平衡原理方法主要包括静平衡法和动平衡法。
1. 静平衡法静平衡法是通过在转子上加质量来实现平衡,常用的方法有单面加质法和双面加质法。
单面加质法是在转子的一个平面上加质量,通过调整质量的位置和大小,使得转子在该平面上平衡;双面加质法是在转子的两个平面上分别加质量,通过调整两个质量的位置和大小,使得转子在两个平面上平衡。
2. 动平衡法动平衡法是通过在转子上进行试验,测量振动信号,然后根据振动信号的特征和数学模型,计算出需要调整的质量和位置,实现转子的平衡。
常用的方法有单面试重法、双面试重法和切除法。
单面试重法是在转子的一个平面上试重,通过试重的位置和大小,调整质量的分布,使得转子在该平面上平衡;双面试重法是在转子的两个平面上分别进行试重,通过试重的位置和大小,调整两个质量的分布,使得转子在两个平面上平衡;切除法是根据振动信号的特征,确定需要切除的质量位置,然后进行切除,实现转子的平衡。
二、转子动平衡标准转子动平衡的标准主要包括国际标准和国内标准。
国际标准主要有ISO1940《机械振动-旋转机械的平衡要求》和ISO2953《机械振动-旋转机械的平衡试验方法》。
ISO1940主要规定了旋转机械的平衡质量和平衡级别的要求,根据转子的质量和转速确定平衡质量的上限和平衡级别的要求;ISO2953主要规定了旋转机械的平衡试验的方法和要求,包括试重法和试切法的试验步骤和计算方法。
国内标准主要有GB/T 25709-2010《转子的平衡质量和平衡级别》和GB/T 3323-2005《旋转机械平衡试验方法》。
GB/T 25709-2010与ISO1940类似,主要规定了旋转机械的平衡质量和平衡级别的要求;GB/T 3323-2005与ISO2953类似,主要规定了旋转机械的平衡试验的方法和要求。
转子动平衡原理引言:转子是机械设备中常见的旋转部件,其平衡性对于设备的正常运行至关重要。
转子动平衡是指通过调整转子的质量分布,使其在旋转时不产生过大的振动。
本文将介绍转子动平衡的原理及其应用。
一、转子动平衡的原理1. 转子的不平衡转子在加工、装配、使用过程中,由于制造和安装的误差,会导致质量分布不均匀,产生不平衡。
这种不平衡会引起转子在旋转时产生振动,降低设备的工作效率,甚至损坏设备。
2. 转子动平衡的目标转子动平衡的目标是使转子的质量分布均匀,使得转子在旋转时不产生振动。
通过调整转子的质量分布,使得转子的重心与转轴的轴线重合,达到动平衡的状态。
3. 转子动平衡的原理转子动平衡的原理基于质量守恒和力矩平衡原理。
具体步骤如下:(1)确定转子的不平衡量通过测量转子在旋转时产生的振动,可以得到转子的不平衡量。
常用的测量方法有静态平衡和动态平衡。
(2)确定不平衡质量的位置根据转子的振动情况和测量数据,可以确定不平衡质量的位置。
一般来说,不平衡质量的位置与振动最大的位置相对应。
(3)调整转子的质量分布根据不平衡质量的位置,可以通过增加或减少质量来调整转子的质量分布。
常用的方法有在转子上加重或去重,或者在转子上粘贴平衡块等。
(4)检验转子的平衡性调整完转子的质量分布后,需要再次测量转子的振动情况,以验证转子是否达到了动平衡的状态。
如果振动仍然超过允许范围,则需要进一步调整。
二、转子动平衡的应用1. 旋转机械设备转子动平衡广泛应用于各种旋转机械设备,如发电机、风力发电机组、汽车发动机等。
通过进行转子动平衡,可以提高设备的工作效率,延长设备的使用寿命。
2. 航空航天领域在航空航天领域,转子动平衡更加重要。
转子的不平衡会导致飞机或火箭在高速飞行时产生振动,影响飞行的安全性和稳定性。
因此,对于飞机或火箭的发动机和旋翼等转子部件,需要进行精密的动平衡调整。
3. 制造业在制造业中,转子动平衡也是一个重要的工艺环节。
例如,汽车制造中的发动机转子、空调制造中的风扇转子等,都需要进行动平衡调整,以保证产品的品质和性能。
转子动平衡一、动平衡的定义:不平衡的转子经过测量其不平衡量和不平衡相位,并加以校正消除其不平衡量,使转子在旋转时,不致产生不平衡离心力的平衡工艺叫做动平衡。
二、校正面的选择:平衡校正面必须选择垂直于转子轴线的平面转子外径:D转子长度:L①对于薄盘状转子(L/D≤5),因偶不平面很小,一般只选择一个校正面,称为单面平衡或称静平衡②对于长轴类转子(L/D>5),必须选择两个或者两个以上校正面,称双面平衡或者多面平衡亦称动平衡③对于初始不平衡量很大,旋转时振动过大的转子,应先做单面静平衡,且校正面最好选择在重心所在的平面上,以防偶不平衡量增大;或者选择在重心两侧的两个校正面上校正,或根据要求,选择在靠近重心的平面上校正,然后再做动平衡。
三、校正方法:转子的不平衡是因其中心主惯性轴与旋转轴线不重合而产生的.平衡就是改变转子的质量分布,使其中心主惯性轴与旋转轴线重合而达到平衡的目的.当测量出转子不平衡的量值或相位后,校正的方法有:1、去重法—即在重的一方用钻孔,磨削,錾削,铣削和激光穿孔等方法去除一部分金属。
2、加重法--即在轻的一方用螺钉连接,铆接,焊接,喷镀金属等方法,加上一部分金属。
3、调整法—通过拧入或拧出螺钉以改变校正重量半径,或在槽内调整二个或二个以上配重块位置。
4、热补偿法—通过对转子局部加热来调整工件装配状态。
四、不同类型转子的动平衡注意事项:1.滚动轴承转子的平衡装有滚动轴承的转子,平衡时最好带着滚动轴承一起平衡,从而消除滚动轴承的内环偏心引起的不平衡,带轴承的转子一般在V型支承上进行2.无轴颈的转子的平衡无轴颈的转子必须在工艺轴上进行平衡.由于工艺轴本身的制造误差:径向和轴向跳动.工艺轴本身的不平衡以及转子配合时存在的径向间隙,使转子在平衡时会带来不可避免的误差五、转子不平衡量的计算方法:1、计算转子的允许不平衡度(率)Eper=(G*1000)/(n/10)式中:Eper——允许不平衡度单位μmG——不平衡精度等级一般取6.3n——工作转速单位r/min例如:某工件工作转速1400r/min平衡精度等级取6.3,则Eper=(GX1000)/(n/10)= (6.3X1000)/(1400/10)=45μm2、计算允许残余不平衡量m=(Eper*M)/(r*2)式中:m——允许残余不平衡度单位gM——工件旋转质量单位kgr——工件半径单位mm例如:工件质量20kg,半径60mm双面平衡,故计算每个平衡面的允许的剩余不平衡量为m=(Eper*M)/(r*2)=(45x20)/(60x2)=7.5g3、转子平衡品质——衡量转子平衡优劣程度的指标G=Eper*ω/1000式中:G——转子平衡品质mm/s 从G0.4-G4000分11级;Eper——转子允许的不平衡度g.mm/k 或mm/s或转子质量偏心距μmω——相应于转子最高工作转速的角速度ω=2πn/60≈n/104、最小可达剩余不平衡量(umar)——单位g.m,平衡机能使转子达到的剩余不平衡量的最小值,是衡量平衡机最高平衡能力的性能指标,当该指标用不平衡度表示时,称为最小可达或剩余不平衡度(单位g.mm/kg)5、不平衡量减少率(URR)——经过一次平衡校正所减少的不平衡量与初始不平衡量之比值,他是衡量平衡机效率的性能指标,以百分数表示:URR(%)=(U1-U2)/U1*100式中:U1为初始不平衡量;U2为一次平衡校正后的剩余不平衡量6、校验转子——为校验平衡机性能而设计的刚性转子,其质量、大小、尺寸均为有规定,分立式和卧式两种,立式转子质量为1.1、3.5、11、35、110kg,卧式转子质量为0.5、1.6、5、16、50、160、500kg7、不平衡国偶干扰比——单面平衡机抑制不平衡力偶影响的性能指标。
转子动平衡及操作技术一. 转子动平衡..(一).有关基本概念1.转子机器中绕轴线旋转的零部件,称为机器的转子.2.平衡转子旋转与不旋转时对轴承只有静压力的转子.3.不平衡转子如果转子在旋转时对轴承除有静压力外,附加有动压力,则称之为不平衡的转子不平衡是一个旋转体的质量轴线(惯量轴线)与实际的旋转轴线不重合。
其单位为不平衡的质量与该质量中心至实际旋转轴线的距离的乘积,以gmm计量。
不平衡有3种表现形式。
不平衡转子的危害性:转子如果是不平衡的,附加动压力将通过轴承传达到机器上,引起整个机器的振动产生噪音,加速轴承的磨损,降低机器的寿命,甚至使机器控制失灵,发生严重事故.(二)转子不平衡的几种形式1.静不平衡静力不平衡(单平面) 表现在一个旋转体的质量轴线与旋转轴线不重合,但平行于旋转轴线,因此不平衡将发生在单平面上。
不平衡所产生的离心力作用于两端支承上是相等的、同向的。
主矢不为零,主矩为零:R0═Mrcω²≠0 rc≠0M0═0JYZ═JZX═0R0通过质心C,转轴Z与中心主惯性轴平行。
(图1)通过加重、去重、调整等方法形成一个平衡合力,使原来不平衡力与附加的平衡力的矢量和趋于零。
主矢和主矩均不为零,但相互垂直R0═Mrcω²≠0M0═0JYZ═JZX═0R0不通过质心C,转轴Z与中心主惯性轴相交于某一点。
(图2)3.偶不平衡偶力不平衡表现在一个旋转体的质量轴线与旋转轴线不重合,但相交于旋转体重心,不平衡所产生的离心力作用于两端支承是相等而180°反向的。
主矢为零,主矩不为零R0═0 rc═0M0≠0JXZ≠0 JYZ≠0(图3)通过加重、去重、调整等方法形成一个平衡合力,使原来不平衡力与附加的平衡力的矢量和趋于零。
动力不平衡(双平面) 表现在一个旋转体的质量轴线与旋转轴线不重合,而且既不平行也不相交,因此不平衡将发生在两个平面上,可以认为动力不平衡是静力不平衡和偶力不平衡的组合,不平衡所产生的离心力作用于两端支承,既不相等且向量角度也不相同。
转子动平衡标准转子动平衡是指在运转时,转子的质量分布和转动轴线之间的关系达到一定的要求,使得转子在高速旋转时不会产生过大的振动和噪音,保证设备的安全稳定运行。
转子动平衡标准是对转子动平衡质量进行评定和检验的依据,是保证转子动平衡质量的重要技术文件。
转子动平衡标准主要包括以下几个方面的内容:1. 转子动平衡的基本原理和要求,转子动平衡是通过改变转子的质量分布,使得转子的质心与转动轴线重合,达到动平衡状态。
转子动平衡要求在设计、制造和安装过程中严格按照相关标准和规范进行,确保转子在运行时不会产生不必要的振动和噪音。
2. 转子动平衡的分类和标准,根据转子的结构和用途不同,转子动平衡可分为静平衡和动平衡。
静平衡是指转子在静止状态下的平衡,动平衡是指转子在运转状态下的平衡。
转子动平衡标准根据国家标准和行业标准进行制定,对于不同类型的转子有相应的平衡标准,确保转子动平衡质量的可靠性和稳定性。
3. 转子动平衡的检测方法和要求,转子动平衡的检测是保证转子动平衡质量的重要环节,主要包括静平衡和动平衡的检测方法和要求。
静平衡检测主要通过静平衡试验台进行,动平衡检测主要通过动平衡机进行,确保转子在制造和安装过程中达到设计要求的平衡质量。
4. 转子动平衡的标准化管理,转子动平衡标准化管理是指对转子动平衡过程中的各项技术要求和管理措施进行规范化和标准化,确保转子动平衡质量的稳定性和可靠性。
标准化管理涉及到转子动平衡的设计、制造、安装和维护等全过程,对转子动平衡质量进行全面管理和控制。
5. 转子动平衡的应用和推广,转子动平衡标准的制定和实施,对于提高设备的运行效率和安全性具有重要意义。
通过转子动平衡标准的应用和推广,可以有效减少设备的振动和噪音,延长设备的使用寿命,提高设备的生产效率和品质。
综上所述,转子动平衡标准是对转子动平衡质量进行评定和检验的依据,是保证设备安全稳定运行的重要技术文件。
通过严格执行转子动平衡标准,可以有效提高设备的运行效率和安全性,促进设备制造和维护技术的进步和发展。
浅析电机转子的动平衡摘要:平衡是一种改善转子质量分布,以使转子在旋转时不致产生过量的不平衡离心力的工序。
而转子就是带轴颈的旋转体,通过平衡能够降低旋转产生的振动。
转子的平衡是针对刚性而言的,刚性转子是可以在任意选定的两个校正平面上进行平衡校正,且校正之后在最高转速和接近实际工作的支撑条件下,其不平衡量均不明显超过许用不平衡量的转子,许用不平衡量是为了保证旋转机械正常工作所允许的转子剩余不平衡量,所以为了减少机器的振动,延长轴承使用寿命提高产品质量确保人身安全,平衡工艺是必不可少的。
关键词:不平衡量重径积偏心距校正平面不平衡度平衡精度不平衡量对电机的影响电机转子的动平衡精度直接影响电机的使用性能,其中电机的振动与转子平衡精度密切相关,尤其是高转速、低振动的电机,转子动平衡显的尤为重要。
如我车间生产的主轴电机、027高转速电机要求动平衡精度达到1G,才能符合性能指标要求。
下面是我车间生产的IPH6135主轴电机在重径积为11.7mg.mm和23.4mg.mm时的振动曲线转速一、下面我就对转子动平衡作一简要分析。
(1).电机转子的动平衡原理电机转子一般都存在静不平衡和偶不平衡,这种组合称为动不平衡。
所以任何一个不平衡的转子经过动平衡后,不仅消除了偶不平衡,同时也消除了静不平衡,这时转子的中心惯性主轴和转动轴线也就趋于一致了。
(2).不平衡的离心力向效正面的简化由理论力学可知,两个平行力可以合成为一个与之平行的力。
反之,一个力也可以分解为与之平行的两个力,如图1所示。
如作用于O 点的力F 可以分解为作用于A 、B 两点的同向平行力F '与F '',而且A 、B 两点的位置是任意指定的,各力间关系是F F F ''+'=,F b a b F ⨯⎪⎭⎫ ⎝⎛+=', F b a a F ⨯⎪⎭⎫ ⎝⎛+=''设有不平衡的刚性转子M 绕定轴Z 作匀速转动,如图二所示由于转子是不平衡的,可将其理解为由若干个偏心薄圆盘组成,各圆盘的重心都不在转动轴线上,当转子匀速旋转时,各圆盘均产生一个惯性力即1F ,2F ,…,n F 等组成一个空间惯性力系,这些惯性力虽然大小、方向和位置都不相同,但它们都通过转动轴线,都和转动轴线垂直。
转子平衡的选择与确定转子动平衡技术的方法一. 静平衡静平衡在转子一个校正面上进行校正平衡,校正后的剩余不平衡量以保证转子在静态时是在许用不平衡量的规定范围内,称为静平衡又称单面平衡。
二. 动平衡动平衡在转子两个或者两个以上校正面上同时进行校正平衡,校正后的剩余不平衡量以保证转子在动态时是在许用不平衡量的规定范围内,称为动平衡又称双面或者多面平衡。
三. 转子平衡的选择与确定如何选择转子的平衡方式,是一个关键问题。
其选择有这样一个原则:只要满足于转子平衡后用途需要的前提下,能做静平衡的,则不要做动平衡,能做动平衡的,则不要做静动平衡。
原因很简单,静平衡要比动平衡容易做,省功、省力、省费用。
那么如何进行转子平衡型式的确定呢?需要从以下几个因素和依据来确定:1.转子的几何形状、结构尺寸,特别是转子的直径D与转子的两校正面间的距离尺寸b之比值,以及转子的支撑间距等。
2.转子的工作转速关转子平衡技术要求的技术标准,如GB3215、API610、GB9239和ISO1940等。
3.转子做静平衡的条件在GB9239平衡标准中,对刚性转子做静平衡的条件定义为:如果盘状转子的支撑间距足够大并且旋转时盘状部位的轴向跳动很小,从而可忽略偶不平衡(动平衡),这时可用一个校正面校正不平衡即单面(静)平衡,对具体转子必须验证这些条件是否满足。
在对大量的某种类型的转子在一个平面上平衡后,就可求得最大的剩余偶不平衡量,并除以支撑距离。
如果在最不利的情况下这个值不大于许用剩余不平衡量的一半,则采用单面(静)平衡就足够了。
从这个定义中不难看出转子只做单面(静)平衡的条件主要有三个方面:(1)一个是转子几何形状为盘状;(2)一个是转子在平衡机上做平衡时的支撑间距要大;(3)再一个是转子旋转时其校正面的端面跳动要很小。
对以上三个条件作如下说明:(1)何谓盘状转子主要用转子的直径D与转子的两校正面间的距离尺寸b之比值来确定。
在API610标准中规定D/b<6时,转子只做单面平衡就可以了;D/b≥6时可以作为转子是否为盘状转子的条件规定,但不能绝对化,因为转子做何种平衡还要考虑转子的工作转速。