平衡梁简便说明书
- 格式:doc
- 大小:788.00 KB
- 文档页数:4

平衡梁工艺平衡梁制作要领一、概况1 工程简介平衡梁主要由件1、件2、件3及腹杆组成。
主尺度如图所注,宽度为3.6米,重量为4.85吨。
(不含平衡箱)2材料2.1主材料(1)B□524×220×12×12 材质:SM490 (Q345B)(2)B□396×220×8×8 材质:SM490(3)B□300×200×8×8 材质:SM490(4)B□300×200×6×6 材质:SM490(5)B□200×200×6×6 材质:SM490(6)¢139.3×4.8 材质:STK400(待查)(7)¢114×4.3 材质: STK4002.2焊接材料(1)CO2气体保护焊采用CHW-50C6、YC-YJ502(Q)焊丝;(2)手工电弧焊采用E50型焊条;2.3 材料检验主材、和焊接材料按工厂质量体系要求的程序进行采购、检验和保管。
钢材和钢管应按GB50205-2001标准的要求进行适当的复验,化学成分和机械性能必须满足标准和设计要求。
3 人员资质要求焊工和无损探伤人员应持有相对应的资格证。
4外协工程项目(1)件1与件2相连部分的铰座孔1组(2个)(2)件2与件3相连部分的铰座孔1组(2个)二、制作要领1制作流程(1)平面拼装件1、件2、件3主弦杆上段流程(2)立体拼装平衡梁上段流程2原寸要领(1)矩形管拼焊:纵向长度每根加放余量40毫米,高度、横向方向板材加放1毫米;(2)需金加工的内圆加放余量20毫米。
(¢230毫米下料内径为210毫米;¢200毫米下料内径为200毫米,)(3)件1、件2、件3弦杆加放余量2毫米。
3下料要领(1)矩形管:矩形管按原寸资料用锯床下准长度(含斜口),然后用半自动切割机割出焊接坡口。
(记录弦杆长度)(2)圆管:圆管用多维自动切管机下料并开坡口,同时割出节点板槽口(3)节点板用数控切割机下料。

摊铺机平衡梁使用方法
摊铺机平衡梁是一种非常重要的组件,用于保持摊铺机的平衡和稳定性。
在使用摊铺机平衡梁时,需要注意以下几点:
首先,摊铺机平衡梁需要正确安装,确保其稳固牢靠。
在安装过程中,需要仔细检查每个连接点,确保其紧固可靠。
其次,摊铺机平衡梁在使用前需要进行调整。
调整的方法包括调整各个连接点的角度和长度,以确保平衡梁能够在摊铺机运行时保持水平。
最后,使用摊铺机平衡梁时需要注意对其进行定期检查和维护。
检查的内容包括检查连接点是否松动、检查平衡梁是否出现变形等等。
在发现问题时,需要及时进行修理或更换。
总之,摊铺机平衡梁是摊铺机非常重要的组成部分,使用时需要注意以上几点,以确保其稳定性和可靠性。

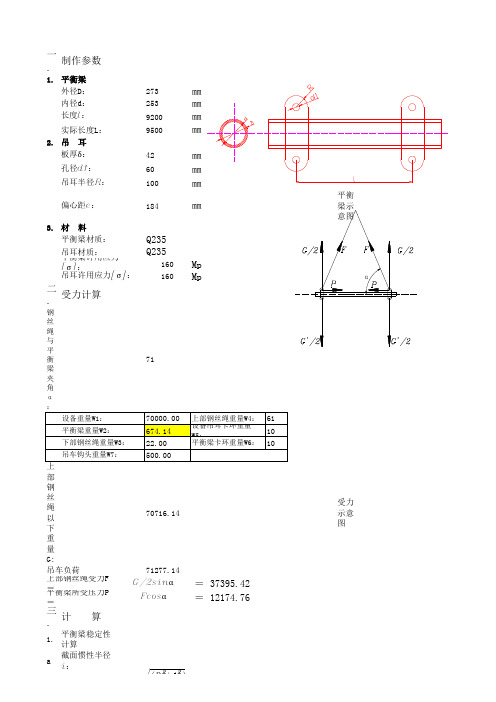
5T 平衡梁计算书 根据现场实际情况,选用槽钢型平衡梁。
该平衡梁可用于吊装直径φ1200mm~1400mm 左右的设备。
如图(一)图(一)材料为Q235-A ,其MPa MPa s 210235~185,取中值=σ(GB700-88),许用一. 槽钢的选择设备重量4.07T ,用双分支吊装,平衡梁受力简图如图(二)。
分支拉力L F 平衡梁的夹角为)60~45(︒︒α,计算取︒55,吊重Q=4.07T 计算吊重动计K Q Q ⋅=44.12.12.121=⨯=⨯=K K K 动其中 1K 为冲击系数,2K 为不均匀系数 故 Q 计=4.07×1.44=5.86TF V =Q/n=5.86/2=2.93TF L = (Q 计/n)×1/sin a=3.57TF h =F V /tan a=2.05T槽钢为只受轴力作用。
根据强度条件确定槽钢的横截面积为A ≥F h /[σ]=(2.05×1000×9.806)/(140×106)m 2=1.44cm 2选用16a 型槽钢,截面积为21.95×2=43.9cm 2,满足要求。
二. 吊耳板的验算 :如图(三):在断面A1B1处,b=20cm ,δ=3cmσ1=(Q 计/2)/b δ=4.79 MPa在断面A2B2处,b=16cm (偏保守),δ=3cm ,d=8cmσ2=(Q 计/2)/(b-d)δ=11.97 MPa在断面A3B3处,D=2R=16cm ,d=8cm ,δ=3cm 按拉漫公式验算: σ=(Q 计/2)/d δ=11.97 MPaσ3=σ(D 2+d 2)/ (D 2-d 2)=19.95 MPa吊索方向最大拉应力:σL =F L /((D-d) δ)=14.59 MPa []σ<,满足要求。
三. 焊缝的验算:对平衡梁受力分析知:焊缝(左侧吊耳)主要承受如图示方向的作用力 其剪切力为=⨯-⨯=3201054251h h F F P 96.63T 32010542511⨯-⨯=h h F F P =-34.87T (即1P 方向应向右) 上边焊缝承受弯距较下边的大,故只校验上边焊缝即可m N F M h •=⨯⨯⨯⨯=⨯=-23.72672105.10806.9100058.705.82m N l h M f f M .872.5910)2255(24.123.7267264.16622=⨯⨯-⨯⨯⨯==-τ m N l h P f .358.66102)2255(27.0806.9100063.967.04=⨯⨯⨯-⨯⨯⨯⨯==-剪τ式中: f h ——焊缝厚度l ——焊缝总计算长度,等于焊缝实际长度减去2f h[]ττττ MPa M 376.89358.66872.592222=+=+=剪,安全。

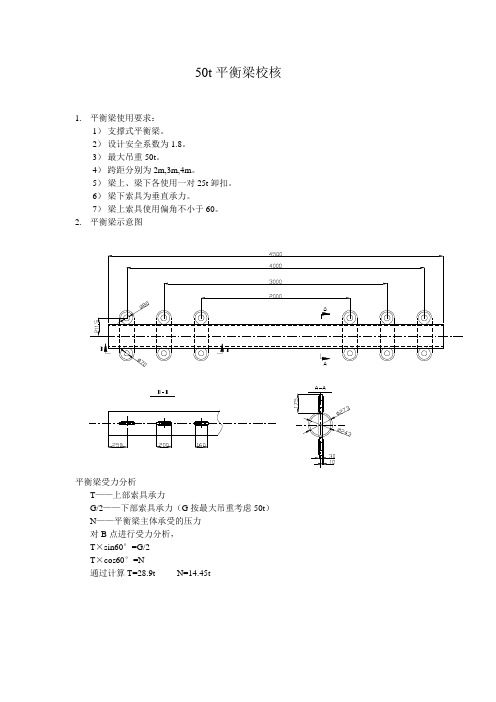
50t平衡梁校核1.平衡梁使用要求:1)支撑式平衡梁。
2)设计安全系数为1.8。
3)最大吊重50t。
4)跨距分别为2m,3m,4m。
5)梁上、梁下各使用一对25t卸扣。
6)梁下索具为垂直承力。
7)梁上索具使用偏角不小于60。
2.平衡梁示意图平衡梁受力分析T——上部索具承力G/2——下部索具承力(G按最大吊重考虑50t)N——平衡梁主体承受的压力对B点进行受力分析,T×sin60°=G/2T×cos60°=N通过计算T=28.9t N=14.45t通过受力分析可知平衡梁本体只承受轴向压力,吊耳板承受纵向拉力。
管梁选用φ273×15,材料为2号钢,[σ]=140 mPa.1)平衡梁稳定校核N—轴向应力N=14.45×104(N)ψ—稳定系数可由λ查表得λ=μ×L/rμ—修正系数查表3-12。
得μ=1。
L—平衡梁长度L=4000mmr—惯性半径r=(I/A)1/2=108.4∴λ=1×4000/108.4=37查表得ψ=0.910M—受压弯距M=N×e=14.45×104×241.5=3.5×107W—截面系数可查表得W=7.432×105σ=N/ψA+M/W=14.45×104/(0.910×12010)+3.5×107/7.432×105=13.2+47.1=60.3mPa< [σ]平衡梁稳定满足。
2)吊耳拉伸计算σ=(G/2)/A=25×104/[30×(200-80)]=69.4mPa吊耳材料为Q235C,σs=225 mPa.σ×n=125mPa.<σs 强度满足。
3)吊耳孔挤压强度计算σ=T/A=28.9×104/[50×60]=96.3mPa吊耳材料为Q235C,σs=225 mPa.σ×n=173.4<σs 强度满足。
MOBA-matic(CAN)非接触式平衡梁系统操作手册摩巴(大连)自动控制系统有限公司中国.大连西岗区石峰街1号邮政编码:116013电话:86-411-82498011传真:86-411-82498711电子信箱:wangx@本操作手册中的文字、图片都经过了精心的制作。
尽管如此,仍可能存在一些不足。
如您有针对本操作手册的建议或指出其中的不足,请您与当地的经销商联系。
我们将认真对待您所有的建议或意见。
本手册中一些公司名称、商标名称受商标、专利保护。
版权所有,无MOBA(摩巴)书面同意,不得以任何方式进行复制、转让!定货号: 10-02-00855日期: 04.2006MOBAMobile Automation AGKapellenstr.15D-65555 LimburgInternet:www.moba.deMOBA-MaticV 4.XX 非接触式平衡梁操作手册U目录 :U1. 概述 (4)2. 产品描述 (6)3.系统一览表 (7)4.数字控制器 (8)4. 1数字控制器的描述 (8)4. 2 通电自检 (12)4. 3 传感器的识别 (12)4.4 操作菜单 (13)4.5不同用户设定 (20)5.数字坡度传感器 (21)5.1概述 (21)5.2安装 (21)5.3 数字坡度传感器的操作 (21)6.超声波滑靴传感器 (24)6.1概述 (24)6. 2安装说明和检测范围 (24)6.3超声波滑靴传感器的工作 (26)7.非接触式平衡梁 (29)7.1概述 (29)7.2功能模式 (29)7.3安装说明 (30)7.4非接触式平衡梁的操作 (32)8. 保养维护 (34)9.故障时的补救措施 (34)10.认证声明 (36)1.概述修改权我们力求操作手册的准确及更新。
但为确保我们技术的领先地位,我们有权在没有事先通知的情况下,对我们的产品及其操作作出与本手册不一致的改动。
我们对由此而产生的故障、损失均不负责!包装及储存为确保运输安全,本产品包装严格仔细。
36束平衡梁操作手册36束超声波非接触式平衡梁是通用型工程筑路机器控制系统。
其采用的传感器广泛应用于高度、坡度的检测,其操作简单、使用可靠,广泛应用于混凝土摊铺机、沥青摊铺机、铣刨机、推土机、挖掘机、平地机等。
36束超声波非接触式平衡梁是灵活、高效的控制系统。
它是基于先进的微处理器技术,并采用CAN总线技术(Controlled Area Network)。
CAN总线代表了电气机动车辆设备方面最先进的技术,最大限度地保证了系统安全。
并且,由于模块化的设计,它有利于系统的售后操作以及系统的扩展。
基于CAN总线的设计,你可以随意扩展任何新型传感器,使您的系统一直符合现场要求。
数字控制器为系统的核心部分。
一旦传感器接人系统,通电后,数字控制器立即能识别传感器。
本手册包含36束超声波非接触式平衡梁系统的安装、调试及其使用注意事项。
非接触式平衡梁实际上是平均超声波传感器的检测值为工作原理,该套系统采用6个传感器组合,这些传感器找适当位置放置,平均每个传感器的检测值。
江苏奥新科技超声波非接触式平衡梁系统可与不同传感器组合使用。
请遵循本操作手册来安装调试该系统。
一、安装1:开箱检查是否缺少配件36束平衡梁装箱清单序号名称单位数量1 主控器只 22 主控器线根 23 一拖三分线盒只 24 超声波传感器只 65 7芯×1.2米屏蔽电缆线根 26 7芯×2米屏蔽电缆线根 47 黑色包装箱只 28 L型支架只 49 Z型支架只 410 大臂夹块套 411 固定圆盘只 412 铝梁节 413 挂杆根 614 减震块块 415 分线盒挂盒只 216 螺丝配件套 117 集装箱个 118 平衡梁说明书本 119 平衡梁安装服务指导书本 12:安装注:安装前在熨平板下方间隔放置若干块与摊铺厚度相等的方木块,放下熨平板。
(1)夹板安装。
分前后两种夹板,如图1所示,长夹板安装摊铺机大臂后部,较短的夹板安装大臂前部。
平衡梁的形式摘要:一、平衡梁的定义和作用二、平衡梁的形式分类1.按截面形状分类2.按支承方式分类三、平衡梁的材料选择四、平衡梁的应用领域五、平衡梁的设计原则与注意事项正文:平衡梁是一种用于支承和传递载荷的构件,其主要作用是在建筑物或其他结构中平衡载荷,使结构保持稳定。
根据其形式和应用领域的不同,平衡梁可以分为多种类型。
首先,根据截面形状,平衡梁可分为矩形梁、圆形梁、梯形梁等。
矩形梁是最常见的类型,具有较好的承载能力和刚度,适用于各种场合。
圆形梁的抗弯性能较好,常用于桥梁和压力容器等领域。
梯形梁则适用于跨度较小、承载能力要求不高的场合。
其次,根据支承方式,平衡梁可分为固定梁、活动梁和悬臂梁等。
固定梁的两端均固定,主要用于承受均布载荷。
活动梁的一端固定,另一端可移动,用于调整载荷分布或适应结构变形。
悬臂梁仅在一端固定,另一端呈悬挑状,适用于跨度较大的场合。
在选择平衡梁的材料时,需要考虑梁的截面形状、跨度、载荷类型等因素。
常用的材料包括钢材、混凝土、木材等。
钢材具有较高的强度和刚度,适用于大跨度和重载场合;混凝土具有良好的抗压性能,适用于中等跨度和载荷场合;木材则适用于小跨度和轻载场合。
平衡梁广泛应用于建筑、桥梁、机械等领域。
在建筑设计中,平衡梁用于平衡楼板、屋顶和墙体的荷载,保证结构的稳定。
在桥梁工程中,平衡梁用于承受车辆和行人的荷载,保证桥梁的安全。
在机械设备中,平衡梁用于承载部件和传递动力,提高设备的运行性能。
在设计平衡梁时,需要遵循以下原则和注意事项:1.确保梁的强度和刚度满足设计要求。
2.考虑梁的稳定性,避免出现失稳现象。
3.选择合适的材料和截面形状,降低成本和提高性能。
4.考虑梁与其他构件的连接方式,保证整个结构的稳定性和安全性。
总之,平衡梁是一种重要的支承和传递载荷的构件,其形式和应用领域多种多样。
1. 平衡梁校核说明:1)支撑式平衡梁2)按吊装载荷10t校核3)跨距为2m4)梁下索具为垂直承力5)梁上索具使用偏角不小于60°(该计算书按60°校核)6)设计安全系数为1.62. 平衡梁示意图3. 平衡梁受力分析与校核平衡梁自重G=36.75561kg。
按吊装载荷10t校核。
平衡梁在动态平衡状态下,受力如上图示。
简化平衡梁受力,见下图:由作图法知F1 = F4 = 25.882kN平衡梁处于动态平衡中,竖直方向力相等所以:F1×sin15°+ F4×sin15°+ G = F2×sin74°+ F3×sin74°又: F2 = F3所以:F2 = F3 = 7.156kN所以平衡梁受力如图对平衡梁进行受力分析平衡梁轴向力方程:F1横 + F2横 = F3横 + F4横F1横 = F4横 = F1×cos15°= 25.000kNF2横 = F3横 = F2×cos74°= 1.972kN平衡梁纵向力方程:F1竖 = F4竖 = F1×sin15°= 6.699kNF2竖 = F3竖 = F2×sin74°= 6.879kN1)做剪力图、弯矩图(1)剪力图AB、BC、CD、DE各段无载荷作用,F Q为常数,F Q图为斜直线。
从A端开始,求出控则截面剪力如下:F QA = -F1竖 = -6.699kNF QB = F2竖 + F QA = 6.879 - 6.699 = 0.18 kNF QC = -G +F QB = - 0.360 + 0.18= - 0.18 kNF QD = F3竖+F QC = 6.879 -0.18= 6.699 kN(2)弯矩图选A、B、C、D、E为控制截面,求出其弯矩值如下:M A = 0M B = F1竖×0.5 = 6.699×0.5 =3.350kN·mM C = F1竖×1 – F2竖×0.5 = 6.699×1 - 6.879×0.5 = 3.260kN·mM D = F1竖×1.5–F2竖×1+G×0.5=6.699×1.5-6.879×1+0.360×0.5=3.350kN·m M E = 02)刚度校核由《起重机设计手册》P521式4-1-30刚度条件为:λ≤[λ]λ=μL / r式中:L=2000mmr = (I / A)1/2I = π(D4– d4 ) / 64对于Φ114×6钢管,I =π(1144– 1024 ) / 64 = 2.977×106 mm4A =π(572– 512 ) = 2035.752 mm2故 r = (I / A)1/2 =38.243mm查《起重机设计手册》P545表4-1-40取μ = 1查《起重机设计手册》P522表4-1-16取[λ]= 150所以λ=1×2000/38.243 = 52.297 ≤[λ]所以支撑梁刚度满足要求。
1.按键
上调键/下调键
在自动(或半自动)状态,两键一起按,可以选择打钢丝。
在自动状态下,按动该两键,即可上下调节设定值。
在手动状态下,按键将驱动相应的电磁阀。
自动/手动按键(A/M 按键) 该键用于手动、自动的选择。
设定键
该按键用于将实际工作值设定为设定值,并能将设定值归零。
操作步骤如下:
步骤5
同时按动A/M键和设定键
步骤6
同时按动A/M键和设定键
步骤7
同时按动A/M键和设定键
步骤8
同时按动A/M键和设定键
步骤9
同时按动A/M键和设定键
向上油缸最小PWM值。
根据实际情
况按动上下键调整其值。
(建议调为
50),通过上下键调节
向上油缸最大PWM值调节范围。
根据实际情况按动上下键调整其值。
(建议调为70),通过上下键调节
向下油缸最小PWM值。
根据
实际情况按动上下键调整其
值。
(建议调为50),通过上下
键调节
向下油缸最小PWM值调节范围。
根据实
际情况按动上下键调整其值。
(建议调为
70).通过上下键调节.
向上/下输出PWM频率。
开关阀调为2/3.
通过上下键调节.
步骤10
同时按动A/M键和设定键
均值次数
其它内部菜单与用户无关
备注:如油缸上下震荡,请按5、6、7、8步骤适当调整其值(一般减小其值)。
同时也可以按步骤10,适当降低其值。
一般ABG机器的值相对小为35、50、35、50(新机器)。
步骤11
同时按动A/M键和设定键
通过调上下键,把P2值调到5
步骤12
同时按动A/M键和设定键直到显示
通过上下键可以切换两种液压工作方式NPN/PNP,可以通过上下键切换.
一般机型为NPN。