1]T
• 所以,坐标系{B}的(4×4)矩阵表达式为
2.手部位置和姿态的表示
机器人手部的位置和姿态也可以用固连于手 部的坐标系{B}的位姿来表示,如图2-6所示。
坐标系{B}可以这样来确定: 取手部的中心点为原点OB: 关节轴为ZB轴, ZB铀的单 位方向矢量O称为接近矢 量,指向朝外;二手指的连 线为yB后轴,yB轴的单位方 向矢量。称为姿态矢量,指 向可任意选定,xB轴与yB后 铀及ZB轴垂直,X后轴的单 位方向矢量n为法向矢量, 且n=o×a,指向符合右手 法则。
第二章 工业机器人运动学
1、齐次坐标及对象物的描述 2、齐次变换及运算 3、工业机器人连杆参数及其 齐次变换矩阵 4、工业机器人运动学方程
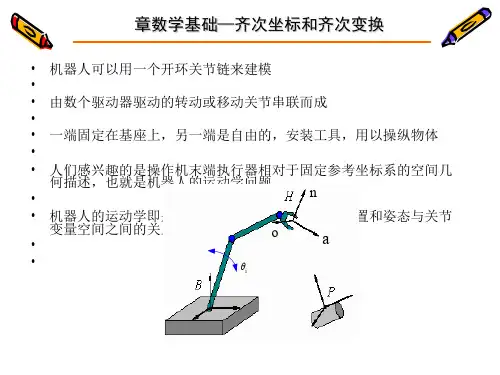
机器人实际上可认为是由一系列关节连接 起来的连杆所组成。我们把坐标系固连在机器 的每个连杆关节上,可以用齐次变换来描述这些 坐标系之间的相对位置和方向。齐次变换具有 较直观的几何意义,而且可描述各杆件之间的关 系,所以常用于解决运动学问题。
§2-1齐次坐标及对象物的描述
一、点的位置描述 在选定的直角坐标系{A}中,空间任一
点P的位置可用3×1的位置矢量Ap表示,其 左上标代表选定的参考坐标系:
式中PX,PY,PZ是点P在坐标系{A}中的三个位 置坐标分量,如图2-1所示。
二、齐次坐标 如用四个数组成的(4×1)列阵
表示三维空间直角坐标系{A}中点p,则列阵[Px Py Pz 1]T称为三维空间点P的齐次坐标。
手部的位置矢量为固定参考系原点指向手部坐标系{B}
原点的矢量p,手部的方向矢量为n、o、a。于是手部
的位姿可用(4X4)矩阵表示为
五、目标物齐次矩阵表示
如图2.8所示,楔块Q在图( a )的情况下,其 位置和姿态可用6个点描述,矩阵表达式为