ARPA雷达JMA98239833操作说明
- 格式:rtf
- 大小:60.14 KB
- 文档页数:1
中国海员之家网站航海资料系列ARPA雷达操作说明 第 1 页 ARPA雷达(JMA 9823/9833)操作说明一、按下PWR键,绿灯亮,3分钟后出现STAND BY,按下TX/STBY键,雷达开始工作;再按TX/STBY可停止发射,设备在预备状态。
二、调整SEA、RAIN、GAIN和BRILL钮,选择RANGE量程,调节TURN钮至物标清晰出现在荧光屏上;SEA、RAIN和TURN分别有手动和自 动,但是雨雪和海浪不能同时自动。
三、捕捉物标,按下ACQ MANUAL键,移动光标到物标上,按下左键,物标被捕捉。
最多可捕捉50个物标。
四、读取物标数据,按下TGT DATA键,将光标移动到物标上,按下左键,物标数据被读取。
五、取消物标,按下ACQ/CANCEL键,将光标移动到物标上,按下左键,物标被取消。
六、设置方位线、距离圈,按下EBL和VRM键,荧光屏出现方位线、距离圈,旋转EBL和VRM钮,设置方位和距离。
七、按下AZI/MODE键,进行真北、真运动、相对运动等选择。
八、按下PL键改变发射脉冲宽度。
九、按下TRUE/REL、VECT/TIME键进行真矢量和相对矢量选择。
十、按下TM/RM键,进行真运动和相对运动选择。
十一、按下OFF/CENT键进行偏心显示。
十二、按下MENU键有9个子菜单,1.IR,按下此键抑制同频干扰(如附近有SART信号应关闭此键)。
2.TGT ENH,按下此键为目标放大功能。
3.PROCESS,程序键。
4.FUNCTION,功能键。
5/ 6.EBL1/EBL2,电子方位线。
7.DATA OFF,按下此键关闭荧光屏部分数据。
8.SUB1 MENU子菜单,按下此键进入下一子菜单:①SETTING-设置罗经、速度、日期时间等内容,此雷达关机后罗经不能跟踪,故开机后要输入罗经航向。
②LEVEL-按此键调节亮度。
③NAV/MAP-导航及转向点信息。
④TRACK-航迹设定。
⑤APRA/AIS-设定CPA、TCPA、AIS功能。
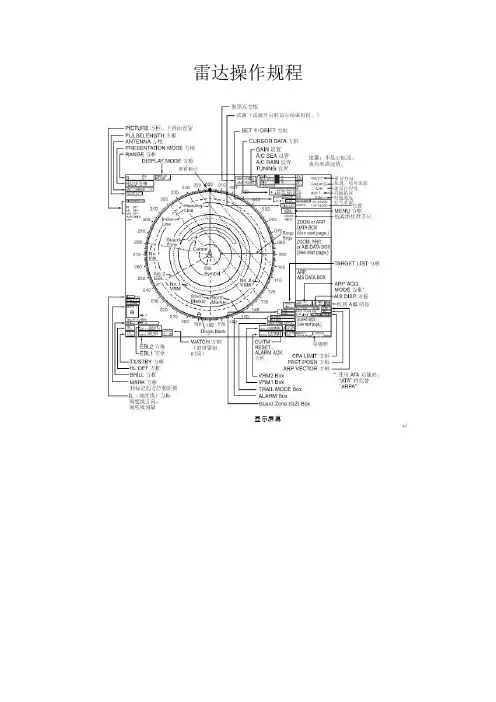
雷达操作规程
一:开机
打开面板“PWR”键的塑料盖子,按下“PWR”键开机,待预热后按下“STBY”键,天线转动,雷达开始工作。
二:开机后设置
开机后,利用“BRILL”调整显示器亮度,调节“TUNE”“GAIN”“AUTO-RAIN”“AUTO-SEA”分别进行调谐,增益,雨雪抑制,海浪抑制的调整,以达到最佳效果,选择雷达显示模式,RADAR 或RADAR+PLOTTER,按“RANGE”的“+”“-”键选择适当量程,三:偏心显示
利用活动球把十字光标移到所希望的位置,按下“OFF CENT”键即可
再按“OFF CENT”键,可使显示回到中心位置
四:雷达标绘
选择“ARPA MAN”移动光标到所选物标点击左键,约半分钟后在雷达屏幕右面显示框里显示该物标的方位,距离,CPA, TCPA等相关数据。
选择AIS ON 点击TARGET 菜单即可看到相关船舶AIS详细信息。
五:设置警戒圈
把光标移动到“GZ”点击左键,然后把光标移动到预设起始位置点击左键用活动球调整距离方位再点击左键设定终止位置,可以设定两个警戒圈。
把光标移动到“GZ”长按左键即可取消警戒圈。
六:选择预设航线
打开MENU菜单,选择NAV LINE WPT选项,然后再选择NAVLINE SELECT选项,输入预设好的航线代号,再设置航线的方向,FORWARD或者REVERSE即可。
七:消除警报
当出现警报时,按下左下角的ALARM ACK键取消报警,然后根据右下角报警描述内容进行相应的故障排除。
八:关机
把“GAIN”“AUTO-RAIN”“AUTO-SEA”调到最小,按“TX/STBY”键,按下“PWR”键即可关机。
ARPA评估实操指导一、ARPA开机前的准备:1、检查天线周围有无人或障碍物:目的是防止天线旋转伤到人或者天线挂住障碍物损坏马达。
2、控制面板上的按钮除调谐外,其他按钮反旋到底。
目的是防止雷达开机时能量过大损伤磁控管。
3、检查罗经、计程仪数据输入是否正常。
4、加低压预热3-5分钟。
目的是使磁控管充分预热。
二、ARPA开机后的调整1、调辉亮2、调调谐,使物标饱满清晰或调谐指示器达到最大。
调谐用来微调本振频率由于开机后有一个热稳定过程,本振频率的准确调谐应在开机工作10~15分钟后进行。
有些雷达装有AFC(自动频率控制电路)代替调谐。
3、调增益,使屏幕背景噪斑点似见非见,增益过大会使得噪斑点淹没物标回波;增益过小会使得弱小回波丢失。
增益(GAIN)按钮用来调节前置中放或主中放的偏压,使中频增益根据回波强弱的实际需要而改变。
4、调整量程12N,相对运动北向上显示。
三、初始数据设置1、本船航向输入:将罗经航向输入ARPA。
注意:此操作应在ARPA处于准备(STANDBY)状态时进行输入。
2、本船航速输入:手动输入或计程仪输入。
注意:避让时输入对水速度,导航时输入对地速度。
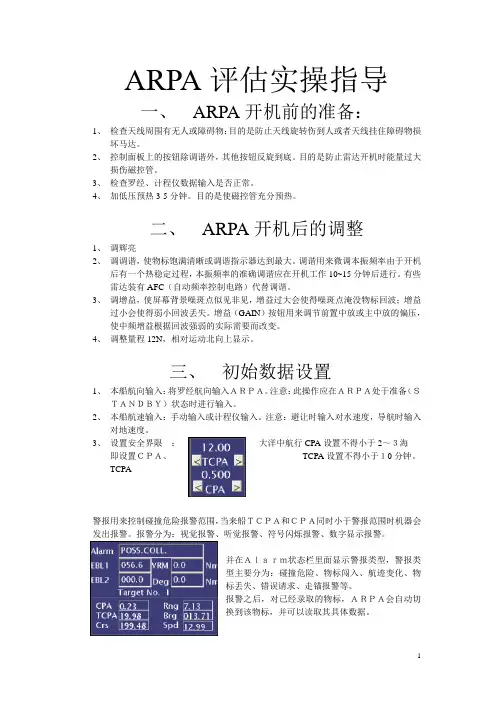
3、设置安全界限:大洋中航行CPA设置不得小于2~3海即设置CPA、TCPA设置不得小于10分钟。
TCPA警报用来控制碰撞危险报警范围,当来船TCPA和CPA同时小于警报范围时机器会发出报警。
报警分为:视觉报警、听觉报警、符号闪烁报警、数字显示报警。
并在Alarm状态栏里面显示警报类型,警报类型主要分为:碰撞危险、物标闯入、航迹变化、物标丢失、错误请求、走锚报警等。
报警之后,对已经录取的物标,ARPA会自动切换到该物标,并可以读取其具体数据。
四、人工录取录取人工录取就是手动的对需要确切观测的物标进行标绘的一种方法,可以对物标随时进行录取、取消以及读数。
1、物标录取:左键点手动录取按钮(Acqr),移动鼠标滚轮,将鼠标所示方框移到要录取物标上,点击鼠标右键确定。
雷达说明书11 RADAR OPERATION雷达操作1.1 Turning on the Power开启雷达The [POWER] switch is located at the left corner of the control unit. Open the power switch cover and press the switch to turn on the radar system. To turn off the radar, press the switch again. The screen shows the bearing scale and digital timer approximately 30 seconds after power-on. The timer counts down three minutes of warm-up time. During this period the magnetron (transmitter tube) is warmed for transmission. When the timer has reached 0:00, the indication "ST-BY" appears at the screen center, meaning the radar is now ready to transmit pulses.电源键位于控制面板的左上角。
打开电源盖、按下打开电源。
再次按下关闭电源。
电源开启后30秒屏幕显示方位圈、电子计数器,计数器倒计时3分钟磁控管预热时间。
但计数器时间归零,屏幕中央显示“待机”,表示雷达已准备发射。
In the stand-by condition, markers, rings, map, charts, etc. are not shown. Further, ARP is cancelled and the AIS display is erased.在待机的情况下,标志、距标圈、海图等将不显示。

道闸雷达安装调试手册目录一、前言 (3)二、产品概述 (3)三、雷达技术参数 (4)四、雷达安装规范 (5)五、接线定义 (5)六、雷达参数设置 (8)七、调试 (9)八、注意事项 (11)九、保修 (12)一、前言本手册适用于触发和防砸道闸雷达,以下将描述道闸雷达的安装、参数设置、调试以及注意事项,指导您正确安装和使用道闸雷达。
本雷达采用当今集成度最高的24G雷达单芯片收发方案,具有技术含量高、专业强的特性,使用前请仔细阅读产品安装调试手册。
二、产品概述2.1、工作原理道闸雷达是采用24-24.5GHz可调连续波(FMCW)和高速数字信号处理技术,通过计算接收的回波频率与发射频率之间的频率差来计算目标距离,经逻辑运算后执行外部控制和数据传输。
2.2雷达特点与应用▲本产品工作于24-24.5GHz频域区间,全天侯,不受任何气候环境的影响。
▲可完全替代“车辆检测器”,实现关闸和防砸功能,省掉了繁琐的切地感线圈工序。
降低人工成本。
▲可检测人体,或人体以上大小的非金属物体,可确保人员和物资在闸机下方的安全通行。
▲可用于触发检测,如触发摄像机抓拍。
▲可用于警戒区域报警触发器用。
▲有流量记录功能,断电不丢失数据。
2.3雷达天线HFSS仿真效果从上图可看出,要获得更窄的波束,可将雷达横向安装三、雷达技术参数1、输入电压:DC12V 150mA2、工作频率:24-24.5GHz3、调制模式:FMCW4、发射功率:10-15dBm5、波束与闸杆夹角:宽波<15°、窄波<12°6、检测距离:1-6米,±0.2米。
7、通讯方式:RS485 、波特率1152008、工作温度:-40℃~+85℃9、防护等级:IP6710、外型尺寸(长*宽*厚) 131mm*106mm*28.5mm四、雷达安装规范4.1触发雷达和防砸雷达均应垂直于车道方向安装,防砸雷达安装在自动闸杆下方的箱体上,触发雷达安装在雷达安装专用支架上,雷达中心距地面最佳高度为0.6m。
导波雷达调试说明书1、参数修改如何使用按键修改仪表参数,请参考该仪表的使用说明书关于按键的使用部分。
2、密码设置维护密码:使用按键输入85,用于仪表操作工维护,不能修改标定数据标定密码:使用按键输入385,用于制造厂出厂标定时使用。
数据备份密码:使用按键输入2198,用于仪表出厂数据备份使用数据恢复密码:使用按键输入8134,用于仪表初始数据恢复使用。
3、仪表标定3.1 正常仪表标定。
在仪表探头上任意取两点(这两点要绕过非线性区,上部180mm和下部120mm),以探头测量部分与探头头部连接螺纹根部为基准,量出这两点的距离 d1和d2,将仪表显示切换到显示L-TCK一项,用金属将这两个部分短接,得出两个L-TCK值分别为L-TCK1和L-TCK2,在仪表调试表格上选择测量类型,有液位、界位或者大量程,选择后在相应的表格中输入这2组数据,同时根据杆长确认输入杆长的范围。
即可得到两个标定数据,这两组数据在表格上显示To和Tx,将To和Tx分别输入到仪表标定参数的CAL-K和CAL-B中,即完成了仪表标定。
3.2仪表正常标定后检验如果仪表是测量液位的,在标定后仪表显示的值与以探头的下端部为基点(或者在下部120mm处为基点)在探头上任取一点(这点要绕过非线性区)的值一致,或者在0.5%的误差范围之内,就算标定合格,不合格需要重新标定。
如果仪表是测量界位的,仪表显示的值要比实际值高(高多少要看实际取点的位置)就算合格。
3.3 特殊仪表标定如果探头是单杆或者没护套的同轴探头,没有外筒,在这种情况下需要用水校,把探头安装在一个液位可调的外筒内,通过调整液位值获得任意两点的液位(这两点要绕过非线性区,上部180mm和下部120mm)。
其余参照3.1。
标定后需要按照3.2检验。
4、小量程手动标定4.1小量程探头范围小量程探头范围有:探头长度L<1.1, 1.1<=探头长度L<1.9,1.9<=探头长度L<3.41.4<=探头长度L<6.1,6.1<=探头长度L<10五种。
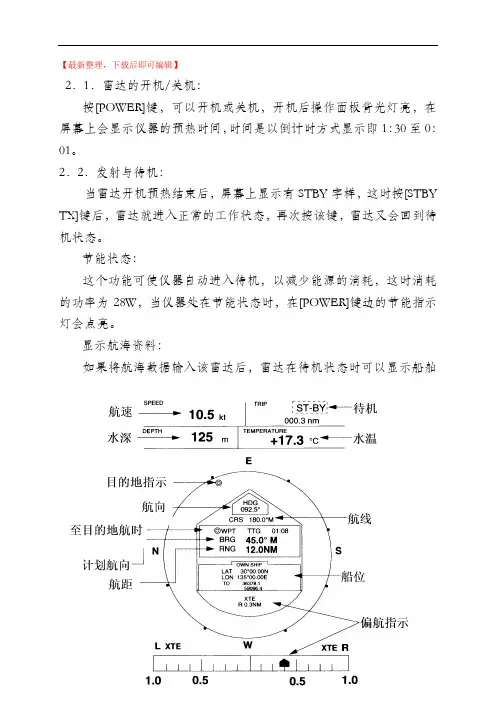
【最新整理,下载后即可编辑】2.1.雷达的开机/关机:按[POWER]键,可以开机或关机,开机后操作面板背光灯亮,在屏幕上会显示仪器的预热时间,时间是以倒计时方式显示即1:30至0:01。
2.2.发射与待机:当雷达开机预热结束后,屏幕上显示有STBY字样,这时按[STBY TX]键后,雷达就进入正常的工作状态,再次按该键,雷达又会回到待机状态。
节能状态:这个功能可使仪器自动进入待机,以减少能源的消耗,这时消耗的功率为28W,当仪器处在节能状态时,在[POWER]键边的节能指示灯会点亮。
显示航海资料:如果将航海数据输入该雷达后,雷达在待机状态时可以显示船舶的航行情况,如下图示:2.3.选择量程:按[-RANGE+]键,可以选择雷达量程的大小,具体选择的量程显示在雷达屏幕的左上角。
2.4.调节屏幕显示的亮度:屏幕的显示亮度分为16级,按[BRILL]键,随时可以调节显示亮度。
2.5.雷达的增益调节:雷达的增益是通过[GAIN]钮调节的,调节的方法是将雷达的量程选择在远距离档,然后调节增益[GAIN]钮,使屏幕上显示的背景噪声隐约可见。
2.6.雨雪干扰抑制调整,海浪干扰抑制调整通过调节[A/C SEA]和[A/C RAIN]钮,可以抑制雨雪及海浪对雷达产生的干扰。
调节方法如下:1、海浪杂波控制调整[A/C SEA]由海浪引起的反射回波是令人讨厌的,它以随机信号(所谓的“海浪杂波”)的形式覆盖在显示器的中心部分。
浪高、天线旋转慢,则海浪杂波向外扩展,海浪杂波以大量小回波信号形式显现在显示器上,它可以影响雷达性能(见图)海浪干扰抑制效果抑制海浪杂波的作用,就是减小近距离海浪杂波的幅度(近距离杂波最大)。
随距离的增加,杂波幅度也逐渐减小。
海浪杂波抑制仅在约4海里以内才起作用。
恰当地调节抗海浪杂波控制器,可使杂波分裂为小亮点,使小目标也可分辨。
但控制过头,杂波和目标都将在屏幕上消失。
2、雨雪干扰抑制功能的具体操作与上述相同:雨雪干扰抑制效果2.7.自动干扰抑制功能:自动调节干扰抑制。
驾驶台资源管理---ARPA的正确使⽤!ARPA的使⽤避碰规则第七条,避碰危机(a) 各船舶应利⽤各种可能适当⽅法,在当前环境与情况下, 分析是否有避碰危机存在,如有任何可疑之处,此危机应视为存在。
(b) 若装雷达并能作业时,应于适当使⽤,包括长距程扫描,亦能及早获得碰撞危机之警告,并⽤雷达测绘或类似之系统设备,观测已测出之⽬标。
(c) 切勿依据不充分资料,尤其不充分之雷达资料,擅作假设。
(d) 在分析是否有碰撞危机存在时,应考虑下列各项:(i) 如果驶近船舶之罗经⽅位⽆显著改变时,碰撞危机应视为存在;(ii) 虽然驶近船舶之⽅位明显改变,碰撞危机有时仍然可能存在,尤其当接近⼀巨型船或拖曳船,或逼近另⼀船。
影像越来越⼤的⽬标,都是碰撞的可能⽬标在COLREG第七条(a)项如有任何可疑之处, 避碰危机应视为存在。
主要是当他船的⽅位改变并不明显的时候,⿎励让路船采取适当⾏动,以避免碰撞。
还有⼀个很有趣的现象,可以相互⽐照,对航空业所谓的”空中碰撞”所做的研究显⽰,有⼀个现象叫做”花开效应” 。
如果⼀个⽬标的影像变得越来越⼤时,可能表明,这时碰撞危机是⽴即存在的,因为⽬标的⽅位不变,影像才会变得越来越⼤。
当这个⽬标影像的变⼤,⽐他的⽅位改变还要快速的时候,影像才会变得越来越⼤。
这时当值船副,就会怀疑碰撞危机,是否可能发⽣了?此时,就需要使⽤第七条(a)项的规则,此危机应视为存在。
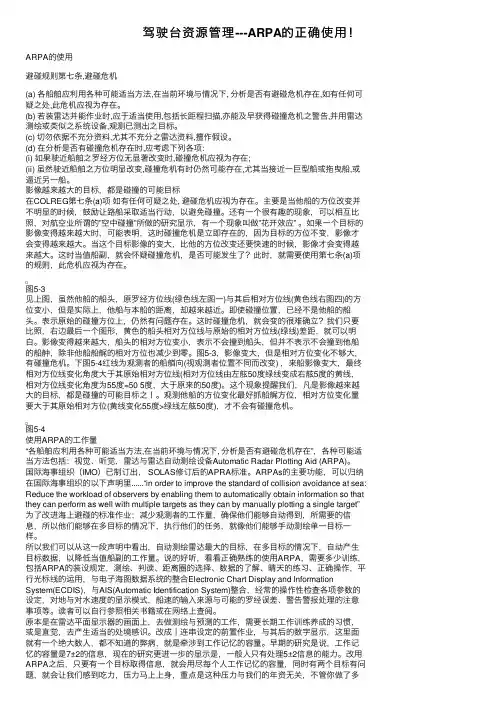
图5-3见上图,虽然他船的船头,原罗经⽅位线(绿⾊线左图⼀)与其后相对⽅位线(黄⾊线右图四)的⽅位变⼩,但是实际上,他船与本船的距离,却越来越近。
即使碰撞位置,已经不是他船的船头。
表⽰原始的碰撞⽅位上,仍然有问题存在。
这时碰撞危机,就会变的很难确⽴?我们只要⽐照,右边最后⼀个图形,黄⾊的船头相对⽅位线与原始的相对⽅位线(绿线)差距,就可以明⽩。
影像变得越来越⼤,船头的相对⽅位变⼩,表⽰不会撞到船头,但并不表⽰不会撞到他船的船舯,除⾮他船船艉的相对⽅位也减少到零。
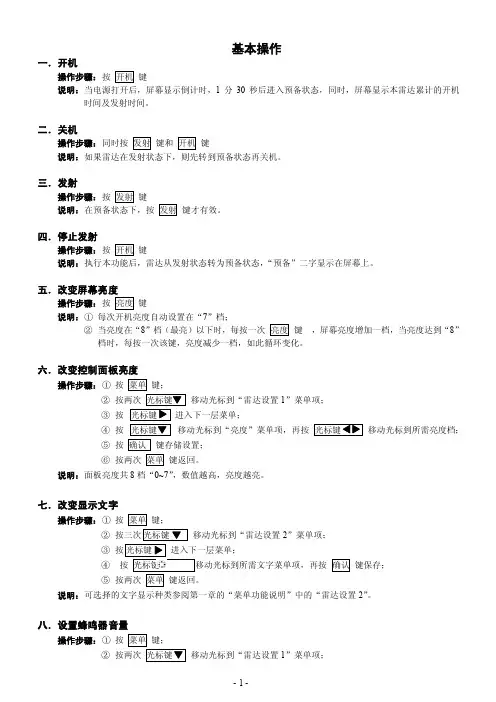
基本操作一.开机操作步骤:按键 说明:当电源打开后,屏幕显示倒计时,1分30秒后进入预备状态,同时,屏幕显示本雷达累计的开机时间及发射时间。
二.关机操作步骤:同时按键和键说明:如果雷达在发射状态下,则先转到预备状态再关机。
三.发射操作步骤:按 键说明:在预备状态下,按 键才有效。
四.停止发射操作步骤:按 键说明:执行本功能后,雷达从发射状态转为预备状态,“预备”二字显示在屏幕上。
五.改变屏幕亮度操作步骤:按 键说明:① 每次开机亮度自动设置在“7”档;② 当亮度在“8”档(最亮)以下时,每按一次 键 ,屏幕亮度增加一档,当亮度达到“8”档时,每按一次该键,亮度减少一档,如此循环变化。
六.改变控制面板亮度操作步骤:① 按 键;② 按两次移动光标到“雷达设置1”菜单项;③ 按 进入下一层菜单;④ 按 移动光标到“亮度”菜单项,再按 移动光标到所需亮度档; ⑤ 按 键存储设置;⑥ 按两次 键返回。
说明:面板亮度共8档“0~7”,数值越高,亮度越亮。
七.改变显示文字操作步骤:① 按 键;② 移动光标到“雷达设置2”菜单项;③ 进入下一层菜单;④ 按 光标键 动光标到所需文字菜单项,再按 键保存; ⑤ 按两次 键返回。
说明:可选择的文字显示种类参阅第一章的“菜单功能说明”中的“雷达设置2”。
八.设置蜂鸣器音量操作步骤:① 按 键;② 按两次 移动光标到“雷达设置1”菜单项;③ 按进入下一层菜单;④ 按 移动光标到所需音量档;⑤ 按 键保存设置;⑥ 键返回。
说明:蜂鸣器音量大小共8档“0~7”,数值越大,声音越大。
九.改变量程操作步骤:按 键改变。
说明:每一次按 键增加量程,每按一次 减少量程。
JMA-2343的量程范围为0~48海里;JMA-2344/2344HS 的量程范围是0~64海里。
十.显示/取消固定距标圈:操作步骤:① 按软键 1② 按软键3,选择 取消固定距标圈显示(或选择 显示固定距标圈);③ 按 键恢复到初始状态。
雷达安全操作规程第一条:为确保雷达正确使用工作正常,操作者必须熟悉本规程。
第二条:有雷达的船舶必须建立雷达日志,并按要求格式认真填写。
第三条:雷达由三付负责保养及联系维修。
第四条:每周必须开机一次加温驱潮。
第五条:除驾驶员外,其它无关人员不得随意开机操作。
第六条:开启雷达前必须确认以下旋钮应处于如下位置:电源:POWER(关)OFF功能开关:FUNCTIONSWITCH(预备)STANDBY天线:SCANNER(关)OFF增益:GAIN逆时针旋转到底海浪抑制:STC逆时针旋转到底(最小)量程:RANGE不少于12海里其它开关可处于任何位置。
除此之外要确认雷达天线无障碍物方可开机。
第七条:开机1、打开电源开关。
2、功能开关处于预备位置,预热指示灯亮。
3、天线无障碍物,可开天线开关。
4、调整照明控制旋钮,使刻度盘及面板光亮适度.5、顺时针操纵增益到70%左右,将功能开关转到发射位置,噪音斑点隐约可见。
同时顺时针转动亮度开关,使之出现回波信号。
6、调整调谐控制到回波最佳为止。
7、用量程开关选择所需距离。
8、显示器中心调整,用中心控制旋钮可调整左、右、上、下。
9、首尾线开关可以关掉船首尾线,使船首回波不被遮挡。
10、首尾线不正可调整首尾线调整开关,向上开可自动使首尾线回零。
11、若不能区分附近物标,可顺时针调整海浪抑制开关,雨雪天可开雨雪抑制开关,但必须注意这些开关的使用同时可以减弱物标回波的强度。
12、物标方位的测量,要转动方位旋钮,直到方位线通过物标回波中心,在方位盘上读取雷达方位。
13、测定物标距离,可顺时针转动活动距标亮度开关并转动测距旋钮与物标相切,读取距离读数即可。
第八条:暂停使用和关机1、暂停使用时,可将功能开关置于准备位置。
天线开关置于“关”位置,这样可不预热,随时按开机程序开机使用,能提高机器使用寿命,减少电能消耗。
2、关机时要把海浪抑制、增益、亮度、旋钮反时针旋到底,关天线,功能开关置于“准备”位置,关电源。
雷达键盘说明
ARP操作程序
激活和休眠ARP功能
选择ARP ACQ MODE项,点击鼠标左键出现OFF, MAN, AUTO MAN三项。
自动录取功能
选择ARP ACQ MODE项,点击鼠标右键,选择1 ARP SELECT然后点击滚轮或左键。
根据需要选择自动录取的状态,然后点击滚轮或左键。
点击右键关闭该菜单。
手动录取功能
当光标在有效的显示区域之内,滚动滚轮,当在指导窗口显示“ACQ”时,将光标移动到你想录取的物标上,按下鼠标左键录取该物标。
取消对物标的跟踪
当光标在有效的显示区域之内,滚动滚轮,当在指导窗口显示“TARGET CANCEL/EXIT”时,将光标移动到ARP物标或参考物标上,按下鼠标左键或滚轮,按下鼠标右键完成操作。
显示物标数据
当光标在有效的显示区域之内,滚动滚轮,当在指导窗口显示“TARGET DATA&ACQ/CURSOR MENU”时,将光标移动到你需要的ARP物标上,按下鼠标左键。
调节符号亮度
选择BRILL窗口,按下鼠标右键,选择0 NEXT,然后按下鼠标左键或滚轮,选择6 ARP SYMBOL,然后按下鼠标左键或滚轮,滚动滚轮调节亮度,双击鼠标右键结束操作。
选择矢量模式和时间
选择屏幕的右侧显示的VECTOR TRUE或者VECTOR REL,按下鼠标左键会相应的显示VECTOR TRUE或者VECTOR REL。
选择矢量时间窗口,按下左键显示需要的时间。
CPA和TCPA报警范围
选择CPA LIMIT窗口,滚动滚轮选择需要的CPA值,然后按下滚轮。
选择TCPA LIMIT窗口,滚动滚轮选择需要的TCPA值,然后按下滚轮。
第1篇一、概述船舶雷达是保障船舶航行安全的重要设备之一,能够帮助船员及时发现前方障碍物,避免碰撞事故。
本规程旨在规范船舶雷达面板的操作流程,确保雷达设备正常运行,保障船舶安全。
二、操作前的准备1. 确认雷达设备已接通电源,电源指示灯亮。
2. 检查雷达显示屏是否正常,是否存在故障。
3. 确认雷达天线已正确安装,且天线角度调整适当。
4. 熟悉雷达面板各按钮、旋钮和开关的功能。
三、基本操作步骤1. 打开雷达设备,按下电源按钮,等待雷达自检完毕。
2. 调整雷达天线角度,确保天线水平方向与船舶前进方向一致。
3. 选择合适的雷达工作模式,如A模式、B模式或C模式等。
4. 调整雷达的灵敏度,根据实际情况选择合适的灵敏度值。
5. 调整雷达的扫描范围,根据需要选择全海图、部分海图或特定区域。
6. 观察雷达显示屏,了解周围海况和障碍物分布。
7. 使用雷达测距功能,测量船舶与障碍物之间的距离。
8. 使用雷达测速功能,测量船舶速度和障碍物速度。
9. 定期检查雷达设备,确保其正常运行。
四、特殊操作1. 雷达故障处理:若雷达出现故障,应立即停机检查,排除故障后再继续使用。
2. 雷达天线故障处理:若雷达天线出现故障,应立即停止使用,通知专业人员进行检查维修。
3. 雷达显示屏故障处理:若雷达显示屏出现故障,应立即停止使用,通知专业人员进行检查维修。
五、注意事项1. 雷达操作人员应具备一定的船舶雷达知识,熟悉雷达面板操作。
2. 雷达操作过程中,应保持雷达设备稳定,避免剧烈震动。
3. 雷达操作人员应时刻关注雷达显示屏,及时发现并处理异常情况。
4. 雷达操作人员应严格遵守相关安全规定,确保船舶航行安全。
5. 雷达操作人员应定期进行雷达设备维护保养,确保雷达设备正常运行。
六、总结船舶雷达面板操作规程是保障船舶航行安全的重要依据。
船员应严格遵守本规程,确保雷达设备正常运行,为船舶安全航行提供有力保障。
第2篇一、概述船舶雷达是船舶导航和避碰的重要设备,能够提供远距离的航行信息和目标物探测。
YM COSMOS雷達功能鍵基本操作●通則:記憶槽中上方為A槽,下方為B槽。
每5000小時或螢幕左下角之TUNE衰減則需更換磁控管。
或或S band。
WG84:GPS系統規格。
相對風向及風速。
●中心偏移:將游標重疊於本船中心(螢幕中心),按左鍵拖曳至想要之位置後放開;按心。
自動。
●ENH改善小目標隻回跡(特別於3nm之RANG)用於小比例尺時,會減低目標之識別能力。
長脈波。
記錄當時各船之位置及時間。
改善與設定白天及晚上之面板及螢幕之亮度。
1.DAY:白天模式。
2.NIGHT1:夜晚模式1。
a.HEADING LINE:船艏線亮度。
b.EBL/VRM:電子方位線/可變距離圈亮度。
c.CURSOR:游標亮度。
d.ARPA:自動雷達測繪援助亮度。
e.TOOLS/RANGE RINGS:工具/距離圈亮度。
f.ROUTES:航路亮度。
g.HISTORY TRACKS:航跡亮度。
h.MAPS:海圖亮度。
i.MENU TEXT:清單信文亮度(?)。
j.TARGET ALARM:目標警報亮度。
k.ALARM TEXT:警報信文亮度。
l.EXIT BRILLIANCE:離開光亮調整。
m.DEFAULT BRILL:不執行亮度調整。
n.PANEL BRILL+:面板亮度增加。
o.PANEL BRILL-:面板亮度減少。
3.NIGHT2:夜晚模式2。
4.NIGHT3:夜晚模式3。
調整螢幕強度。
1.Mode system:。
2.mode RX:。
對地速度,through the water):對水速度。
以左鍵按NAV可選船速資料之來源.游標移至數字欄(變黃)可手動輸入。
●選C,D,M,V,T。
,,。
相對運動目標相對運動模式。
相對運動目標真運動模式。
真/相對向量模式時間。
真艉跡顯示時間。
99分,將會顯示”PERM”。
(?)。
●Warning Prompts:警告提醒。
按ERBL,於EBL上出現一小圈,表示距離。
●快速方位及距離開啟,將游標移至雷達掃瞄幕中,按左鍵持續3秒左右,可快速顯示EBL及VRM。