4 稳态调速性能指标和直流调速系统的机械特性
- 格式:pdf
- 大小:1.27 MB
- 文档页数:33
精心整理二、填空题1.PWM控制技术包括单极性控制和双极性控制两种方式。
2.反馈控制系统的作用是:抵抗扰动,服从给定。
3.静态环流可以分为直流平均环流和瞬时脉动环流。
4.PWM逆变器根据电源类型不同可以分为电压型和电流型。
5.直流电动机电枢的电流由负载决定。
20.V-M系统中,采用三相整流电路,为抑制电流脉动,可采用的主要措施是设置平波电抗器. 21.在单闭环调速系统中,为了限制全压启动和堵转电流过大,通常采用电流截止负反馈。
22.在无静差的直流调速系统中,I部分的作用是__消除稳态误差____。
23.在α=β配合控制的直流可逆调速系统中,存在的是瞬时脉动环流,可用串接环流电抗器抑制。
24.调速系统的稳态性能指标有调速范围、静差率。
25.某直流调速系统电动机的额定转速为n=1430r/min,额定速降为115r/min,要求静差率s≤30%,N则系统允许的最大调速范围为。
26.转速、电流双闭环调速系统当中,两个调节器采用串联联接,其中转速反馈极性为负、电流反馈极性为负。
27.转速、电流双闭环系统,采用PI调节器,稳态运行时,转速n取决于给定电压、ASR的输出量取决于负载电流。
28.下图为单闭环转速控制系统。
(1)图中V是晶闸管整流器;是平波电抗器,它的作用是抑制电流脉动和保证最小续流电流;(2)图中Ld37.在两组晶闸管反并联的可逆调速系统中,反转用正组晶闸管实现回馈制动的。
38、交流异步电动机调压调速工作时,其最大转矩随电机电压的降低而降低。
39、恒压频比控制方式是指给异步电动机供电的电压和之频率比为常数。
40、异步电动机变压变频调速控制特性曲线中,基频以下调速称为恒转矩调速,基频以上调速称为恒功率调速。
42、转速、电流双闭环直流调速系统中,对负载变化起抗扰作用的是转速调节器。
43、对于调速系统,最主要的抗扰性能是抗负载扰动和抗电网电压的性能。
44、在调速系统中常用的抗扰性能指标为动态降落和恢复时间。
上海高等教育自学考试-上海交通大学上海市高等教育自学考试工业自动化专业(独立本科段)(B080603)电力拖动自动控制系统(02297)自学考试大纲上海交通大学自学考试办公室编上海市高等教育自学考试委员会组编2013年版I、课程性质及其设置的目的和要求(一)本课程的性质与设置的目的“电力拖动自动控制系统”是高等教育自学考试“工业自动化”专业(本科)中的一门重要的专业课程,它是为培养工业自动化本科人才的需要而设置的。
在工业生产的诸多设备中,电力拖动自动控制系统是被最广泛应用的一种拖动形式,因为它有着可满足生产工艺各种要求的良好的控制性能。
随着我国国民经济的发展,生产的自动化程度日益提高,对电力拖动装置的工作性能要求也不断提高,更需要大量熟悉工业自动控制知识的人才。
自学考试“工业自动化”专业的开展便是一个很好的培养人才的途径。
作为专业课,它是一门理论密切联系实际的课程。
(二)本课程的基本要求通过对本课程的自学和实验考核,要求考生:1.系统地掌握以电力电子变流器供电的交、直流电力拖动自动控制系统的基本工作原理与基本概念。
掌握应用反馈控制理论提高系统静态精度与动态性能指标的方法。
这是本课程的基础。
2.掌握电力拖动有静差系统与无静差系统的组成,参数的计算以及静态特性的计算。
熟悉如何根据生产机械对系统静、动态性能指标的要求计算系统中相应的参数。
3.学会如何建立系统的数学模型。
4.通过实验,初步学会对电力拖动控制系统的调试。
(三)本课程与相关课程的联系本课程是在考生已自学了“电机与拖动基础”、“自动控制原理”及“电力电子技术”等课程的基础上学习的。
是应用上述先修课程的基本原理与基本知识来研究如何进一步组成具体的交、直流电力拖动自动控制系统。
II、课程内容与考核目标第一章绪论(一)学习目的和要求通过本章的学习,对运动控制系统所涉及内容和学科关系有一个基本的了解;了解运动控制系统的一般结构、各环节内容和基本运动控制规律;了解运动学方程和主要控制方案。
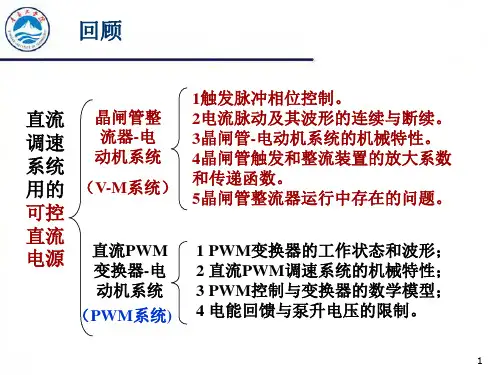
第二章1.常用的可控直流电源类型:2.晶闸管整流器-电动机系统1) 相位控制:(用触发脉冲的相位角α控制整流电压的平均值0d U ),(0<α<2/π时,0d U >0,整流状态,电功率从交流侧输送到直流侧;2/π<α<max α时,0d U <0,有源逆变状态,电功率反向传送。
)2) 电流波形的脉动,在什么情况下可能出现电流连续和断续?抑制措施?3) 晶闸管触发和整流装置的放大系数和传递函数(1)放大系数的计算公式:(2)失控时间的计算(3)传递函数:动态过程中,可把晶闸管触发与整流装置看成是( )环节,由( )引起,可近似为( )处理。
4) 晶闸管整流器运行中存在的问题?3.直流脉宽调速系统的主要问题:1) PWM 调速系统优越性?2) 二象限不可逆PWM 表2-33) PWM 控制器与变换器的动态数学模型?4.稳态调速性能指标和直流调速系统的机械特性1) 调速系统的稳态性能指标: 1.调速范围 2.静差率2) 调速系统的静差率指标应以最低速时所能达到的数值为准.3) 调速范围、静差率和额定速降之间的关系公式。
4) 一个调速系统的调速范围,是指在最低速时还能满足所需静差率的转速可调范围。
5.转速反馈控制的直流调速系统1) 闭环调速系统可以获得比开环调速系统硬的多的稳态特性,从而能保证一定静差率的要求下,能够提高调速范围,代价是增设电压放大器以及检测与反馈装置。
2) 闭环系统能够减少稳态速降的实质。
3) 反馈控制规律的三个基本特征。
4) 比例积分控制的无静差调速系统:6.直流调速系统的数字控制:1) 微机数字控制的特殊问题:(离散化)(数字化)2) 采用旋转编码器的数字测速方法:名称和适用范围7.转速反馈控制直流调速系统的限流保护:采用电流截止负反馈第三章 转速、电流反馈控制的直流调速系统1. 双闭环调速系统的静特性在负载电流小于dm I 时表现为(转速无静差),这时,(转速负反馈)起主要作用,当负载电流达到dm I 时,(电流调节器)起主要调节作用,转速表现为(电流无静差)。
2.2稳态调速性能指标和直流调速系统的机械特性2.2 稳态调速性能指标和直流调速系统的机械特性22.2.1 转速控制的要求和稳态调速性能指标任何一台需要控制转速的设备,其生产工艺对调速性能都有一定的要求。
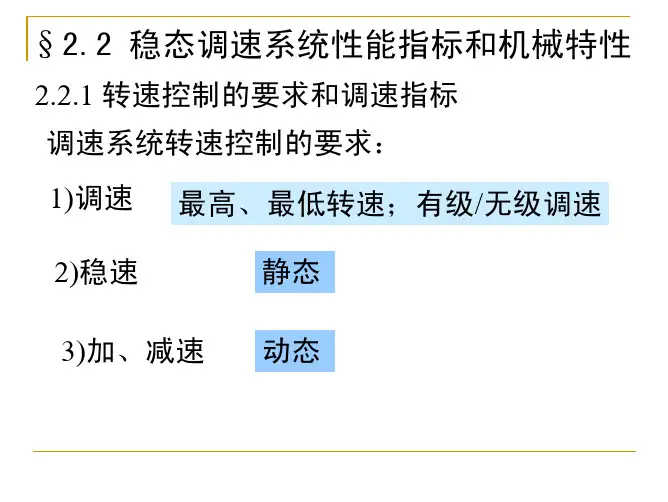
归纳起来,对于调速系统的转速控制要求有以下三个方面:31. 调速系统转速控制要求1)调速——在一定的最高转速和最低转速范围内,有级或无级调节转速;2)稳速——以一定的精度在所需转速上稳定运行,在各种干扰下不允许有过大的转速波动,以确保产品质量;3)加、减速——频繁起、制动的设备要求加、减速尽量快,以提高生产率;不宜经受剧烈速度变化的机械则要求起、制动尽量平稳。
42. 稳态性能指标调速范围稳态性能指标静差率5(1) 调速范围生产机械要求电动机提供的最高转速n max和最低转速n min 之比叫做调速范围,用字母D 表示,即(2-25)min maxn n D =其中n max 和n min 一般都指电动机额定负载时的转速,对于少数负载很轻的机械,例如精密磨床,也可用实际负载时的转速。
eNe T T =6(2) 静差率当系统在某一转速下运行时,负载由理想空载增加到额定值时所对应的转速降落Δn N ,与理想空载转速n 0 之比,称作静差率s ,即N n n s Δ=用百分数表示%1000N×Δ=n n s (2-26)(2-27)式中Δn N = n 0 -n N ,显然,s 用于衡量调速系统在负载变化时转速稳定度。
7T eNT en 0an 0babn Na ?n Nb n 图2-14 不同转速下的静差率(3) 静差率与机械特性硬度的区别一般调压调速系统在不同转速下的机械特性是互相平行的。
对于同样硬度的特性,理想空载转速越低时,静差率越大,转速的相对稳定度也就越差。
8–例如:在1000r/min 时降落10r/min ,只占1%;在100r/min 时同样降落10r/min ,就占10%;如果在只有10r/min 时,再降落10r/min ,就占100%,这时电动机已经停止转动,转速为0。