dsp第三章习题解
- 格式:doc
- 大小:287.00 KB
- 文档页数:5
《数字信号处理与DSP器件》作业及参考答案《数字信号处理与DSP器件》作业及参考答案丁喜冬中⼭⼤学物理科学与⼯程技术学院第1章概述思考题1, P12: 1,2,3, 7,9,11。
2, 查看TI公司⽹站,找出3~4种该公司⽬前主推的DSP芯⽚的型号和价格,下载datasheet。
参考答案:1、DSP算法的实现⽅法主要有哪些?答:(1)在通⽤的计算机(如PC)上涌软件(如C语⾔)实现。
(2)在通⽤计算机系统中加上专⽤的加速处理机实现。
(3)⽤通⽤的单⽚机(如MCS-51、MSP430系列等)实现。
(4)⽤通⽤的可编程DSP芯⽚实现。
(5)⽤专⽤的DSP芯⽚实现。
2、简述DSP应⽤系统的典型构成和特点。
答:DSP应⽤系统的典型构成如下所⽰:3、简述DSP应⽤系统的⼀般设计过程。
答:定义系统性能指标→采⽤⾼级语⾔进⾏性能模拟→设计实时DSP应⽤系统→借助开发⼯具进⾏软硬件调试→系统集成与独⽴系统运⾏。
7、什么是定点DSP芯⽚和浮点DSP芯⽚?各有什么优缺点?答:定点DSP芯⽚:数据以定点格式⼯作的DSP芯⽚。
动态范围⼤,精度⾼,字长为32位(可扩⾄40),程序开发周期短;但功耗⾼,速度慢,价格⾼。
浮点DSP芯⽚:数据以浮点格式⼯作的DSP芯⽚。
功耗低,速度快,价格低;但动态范围⼩,精度低,字长为16位,程序开发周期长。
9、TMS32VC5416-160⼯作在160MHz时的指令周期是多少ns?它的运算速度是多少MIPS?答:当⼯作在100MHz时,其指令周期和运算速度⼜是多少?在160MHz时的指令周期是6.25ns,运算速度是160MIPS;在100MHz时的指令周期是10ns,运算速度是100MIPS。
11、写出以下缩写词的中英⽂全称:DSP、TI、MAC、MIPS、MOPS、MFLOPS、BOPS、DIP、PGA、PLCC、PQFP、PWM答:PGA、PLCC、PQFP、PWM。
DSP:Digital Signal Processing 数字信号处理TI:Texas Instruments 德州仪器MAC:Multiplier and Accumulator 乘累加单元MIPS:Million Instructions Per Second每秒执⾏百万条指令MOPS:Million Operations Per Second每秒执⾏百万次操作MFLOPS:Million Floating-point Operations Per Second每秒执⾏百万次浮点操作BOPS:Billion Operations Per Second每秒执⾏⼗亿次操作DIP:Dual In-line Package 双列直插式封装PGA:Pin Grid Array 直插式封装PLCC:Plastic Leaded Chip Carrier带引线的塑料芯⽚载体PQFP:Plastic Quad Flat Pack 塑料扁平⽅形封装PWM:Pulse Width Modulation 脉冲宽度调制⼆, TI公司⽬前主推的DSP芯⽚的型号和价格:答:TI公司现在主要推出三个系列的dsp芯⽚,其分为从各系列芯⽚的数量来看,C6000⾼性能dsp仍然是当下主流dsp。
《TMS320C54x DSP应用技术教程》部分习题答案注意:未提供的参考答案习题(因考试为开卷形式.部分在课堂讲过.部分需要自行思考归纳总结或编程).请参考PPT和书上示例.自行解答。
第1章绪论1.简述Digital Signal Processing 和Digital Signal Processor 之间的区别与联系。
答:前者指数字信号处理的理论和方法.后者则指用于数字信号处理的可编程微处理器.简称数字信号处理器。
数字信号处理器不仅具有可编程性.而且其数字运算的速度远远超过通用微处理器.是一种适合于数字信号处理的高性能微处理器。
数字信号处理器已成为数字信号处理技术和实际应用之间的桥梁.并进一步促进了数字信号处理技术的发展.也极大地拓展了数字信号处理技术的应用领域。
2.什么是DSP技术?答:DSP技术是指使用通用DSP处理器或基于DSP核的专用器件.来实现数字信号处理的方法和技术.完成有关的任务。
5.数字信号处理的实现方法有哪些?答:参见P3-4 1.1.3节。
6.DSP的结构特点有哪些?答:哈佛结构和改进的哈佛结构、多总线结构、流水线技术、多处理单元、特殊的DSP指令、指令周期短、运算精度高、硬件配置强。
7.什么是哈佛结构和冯洛伊曼结构?它们有什么区别?答:参见P5-6 1.2.2节。
8.什么是哈佛结构和冯.诺依曼结构?它们有什么区别?答:DSP处理器将程序代码和数据的存储空间分开.各空间有自己独立的地址总线和数据总线.可独立编址和独立访问.可对程序和数据进行独立传输.这就是哈佛结构。
以奔腾为代表的通用微处理器.其程序代码和数据共用一个公共的存储空间和单一的地址和数据总线.取指令和取操作数都是通过一条总线分时进行的.这样的结构称为冯·诺伊曼结构。
采用哈佛结构.可同时取指令和取操作数.并行地进行指令和数据的处理.从而可以大大地提高运算的速度.非常适合于实时的数字信号处理。
而冯·诺伊曼结构当进行高速运算时.取指令和取操作数是分时操作的.这样很容易造成数据传输通道的瓶颈现象.其工作速度较慢。
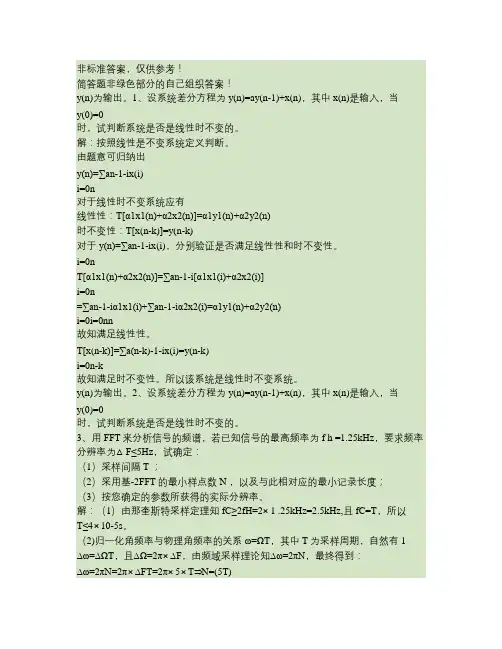
非标准答案,仅供参考!简答题非绿色部分的自己组织答案!y(n)为输出。
1、设系统差分方程为y(n)=ay(n-1)+x(n),其中x(n)是输入,当y(0)=0时,试判断系统是否是线性时不变的。
解:按照线性是不变系统定义判断。
由题意可归纳出y(n)=∑an-1-ix(i)i=0n对于线性时不变系统应有线性性:T[α1x1(n)+α2x2(n)]=α1y1(n)+α2y2(n)时不变性:T[x(n-k)]=y(n-k)对于y(n)=∑an-1-ix(i),分别验证是否满足线性性和时不变性。
i=0nT[α1x1(n)+α2x2(n)]=∑an-1-i[α1x1(i)+α2x2(i)]i=0n=∑an-1-iα1x1(i)+∑an-1-iα2x2(i)=α1y1(n)+α2y2(n)i=0i=0nn故知满足线性性。
T[x(n-k)]=∑a(n-k)-1-ix(i)=y(n-k)i=0n-k故知满足时不变性。
所以该系统是线性时不变系统。
y(n)为输出。
2、设系统差分方程为y(n)=ay(n-1)+x(n),其中x(n)是输入,当y(0)=0时,试判断系统是否是线性时不变的。
3、用FFT来分析信号的频谱,若已知信号的最高频率为f h =1.25kHz,要求频率分辨率为△F≤5Hz,试确定:(1)采样间隔 T ;(2)采用基-2FFT的最小样点数 N ,以及与此相对应的最小记录长度;(3)按您确定的参数所获得的实际分辨率。
解:(1)由那奎斯特采样定理知fC≥2fH=2⨯1 .25kHz=2.5kHz,且fC=T,所以T≤4⨯10-5s。
(2)归一化角频率与物理角频率的关系ω=ΩT,其中T为采样周期,自然有 1∆ω=∆ΩT,且∆Ω=2π⨯∆F,由频域采样理论知∆ω=2πN,最终得到:∆ω=2πN=2π⨯∆FT=2π⨯5⨯T⇒N=(5T)显然,当T越大N越小,故而此处取T=4⨯10-5s,上式后得到N=5⨯103。
DSP习题答案DSP 技术及应⽤综合训练1.DSP全称有哪两个含义?全称分别是什么?答:1、Digital Signal Processing,数字信号处理,指的是⼀门学科2、Digital Signal Processor,数字信号处理器,实现数字信号处理算法的处理器.平常所说的DSP⼀般指后者。
2.TI公司DSP主要分为哪⼏种⼦列?分别⽤于哪些场合答:C2000、C5000和C6000三⼤主流,其中C2000系列属于控制型,相当于⾼端单⽚机;C5000系列属于低成本、低功耗、⾼效率型;C6000系列属于⾼性能的类型,其性能是C5000系列的数⼗倍。
如果你处理的算法不是很复杂的话,建议使⽤C5000系列(如C5509、C5510等);如果算法之类的特别复杂,可以考虑C6000系列。
3.VC5509A硬件结构主要有哪些组成?答:CPU、存储器、⽚上外设。
(⽚上外设:●两个20位的定时器。
●⼀个看门狗定时器。
●l6通道直接存储器存取控制器(DMA),DMA控制器在不需要CPU⼲预的情况下可以提供6路独⽴的通道⽤于数据传输,并且可达每周期两个16位数据的吞吐量。
l外部存储器接⼝(EMIF),它提供与异步存储器如EPROM、SRAM及⾼密度存储器如同步DRAM的⽆缝连接。
l 三个串⼝⽀持最多三个多通道缓冲串⼝(McBSP)或最多两个多媒体/安全数字卡接⼝。
三个全双⼯多通道缓冲串⼝(McBSP)提供了与各种⼯业级串⾏设备的⽆缝接⼝,其多通道通信最多可以实现128个独⽴通道。
增强型主机接⼝(EHPI)是⼀个16位的并⾏接⼝,主机能够提供HPI接⼝访问5509A上的32KB⽚上存储器。
●可编程锁相环(DPLL)时钟发⽣器。
●USB全速(12Mbps)从端⼝。
●I2C主从接⼝。
●⼀个实时时钟。
)4.在CMD⽂件中,Mermory命令的主要作⽤是什么?答:⽤来指定⽬标存储器结构5.在CMD⽂件中,SECTION命令的主要作⽤是什么?答:⽤来控制段的构成与地址分配6.C55X处理器软件开发流程是什么?答:7.利⽤C语⾔与汇编语⾔混合编程优什么优点?答:可以充分地控制处理器的功能,为⼈⼯映射算法构成最有效的程序编码,效率⾼、可维护性和移植性好。
第一章:一、数字信号处置的实现方式一样有哪几种?(1) 在通用的运算机上用软件实现(2) 在通用运算机系统中加上专用的加速处置机实现(3) 用通用的单片机实现,这种方式可用于一些不太复杂的数字信号处置(4) 用通用的可编程 DSP 芯片实现,可用于复杂的数字信号处置算法(5) 用专用的 DSP 芯片实现(6) 用基于通用 dsp 核的asic 芯片实现二、简单的表达一下 dsp 芯片的进展概况?答:第一时期, DSP 的雏形时期( 1980 年前后)代表产品: S2811。
要紧用途:军事或航空航天部门第二时期, DSP 的成熟时期( 1990 年前后)代表产品: TI 公司的 TMS320C20 要紧用途:通信、运算机领域第三时期, DSP 的完善时期( 2000 年以后)代表产品:TI 公司的 TMS320C54 要紧用途:各行业领域3、可编程 dsp 芯片有哪些特点?(1)采纳哈佛结构:冯.诺依曼结构,哈佛结构,改良型哈佛结构(2)采纳多总线结构(3)采纳流水线技术(4) 配有专用的硬件乘法-累加器(5) 具有特殊的 dsp 指令(6) 快速的指令周期(7) 硬件配置强(8) 支持多处置器结构(9) 省电治理和低功耗4、什么是哈佛结构和冯.诺依曼结构?它们有什么区别?哈佛结构:该结构采纳双存储空间,程序存储器和数据存储器分开,有各自独立的程序总线和数据总线,可独立编址和独立访问,可对程序和数据进行独立传输,使取指令操作、指令执行操作、数据吞吐并行完成,大大地提高了数据处置能力和指令的执行速度,超级适合于实时的数字信号处置。
冯.诺依曼结构:该结构采纳单存储空间,即程序指令和数据共用一个存储空间,使用单一的地址和数据总线,取指令和取操作数都是通过一条总线分时进行。
当进行高速运算时,不但不能同时进行取指令和取操作数,而且还会造成数据传输通道的瓶颈现象,其工作速度较慢。
区别:哈佛:该结构采纳双存储空间,程序存储器和数据存储器分开,有各自独立的程序总线和数据总线,可独立编址和独立访问,可对程序和数据进行独立传输,使取指令操作、指令执行操作、数据吞吐并行完成,大大地提高了数据处置能力和指令的执行速度,超级适合于实时的数字信号处置。

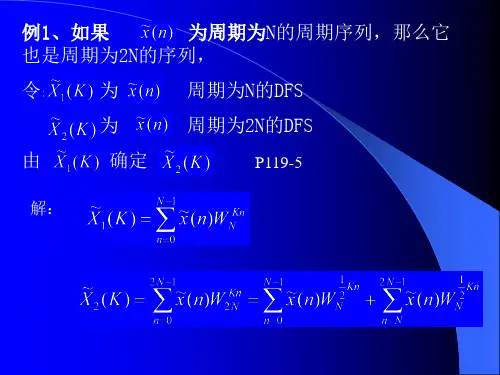
第二章习题解答1、求下列序列的z 变换()X z ,并标明收敛域,绘出()X z 的零极点图。
(1) 1()()2nu n (2) 1()()4nu n - (3) (0.5)(1)nu n --- (4) (1)n δ+(5) 1()[()(10)]2nu n u n -- (6) ,01na a <<解:(1) 00.5()0.50.5nn n n zZ u n z z ∞-=⎡⎤==⎣⎦-∑,收敛域为0.5z >,零极点图如题1解图(1)。
(2) ()()014()1414n nn n z Z u n z z ∞-=⎡⎤-=-=⎣⎦+∑,收敛域为14z >,零极点图如题1解图(2)。
(3) ()1(0.5)(1)0.50.5nnn n zZ u n z z --=-∞-⎡⎤---=-=⎣⎦+∑,收敛域为0.5z <,零极点图如题1解图(3)。
(4) [](1Z n z δ+=,收敛域为z <∞,零极点图如题1解图(4)。
(5) 由题可知,101010910109(0.5)[()(10)](0.5)()(0.5)(10)0.50.50.50.50.50.5(0.5)n n nZ u n u n Z u n Z u n z z z z z z z z z z z --⎡⎤⎡⎤⎡⎤--=--⎣⎦⎣⎦⎣⎦⋅=-----==--收敛域为0z >,零极点图如题1解图(5)。
(6) 由于()(1)nn n a a u n a u n -=+--那么,111()(1)()()()nn n Z a Z a u n Z a u n z z z a z a z a a z a z a ----⎡⎤⎡⎤⎡⎤=---⎣⎦⎣⎦⎣⎦=----=-- 收敛域为1a z a <<,零极点图如题1解图(6)。
(1) (2) (3)(4) (5) (6)题1解图2、求下列)(z X 的反变换。
第一章:1、数字信号处理的实现方法一般有哪几种?答:数字信号处理的实现是用硬件软件或软硬结合的方法来实现各种算法。
(1) 在通用的计算机上用软件实现;(2) 在通用计算机系统中加上专用的加速处理机实现;(3) 用通用的单片机实现,这种方法可用于一些不太复杂的数字信号处理,如数字控制;(4)用通用的可编程 DSP 芯片实现。
与单片机相比,DSP 芯片具有更加适合于数字信号处理的软件和硬件资源,可用于复杂的数字信号处理算法;(5) 用专用的 DSP 芯片实现。
在一些特殊的场合,要求的信号处理速度极高,用通用 DSP 芯片很难实现( 6)用基于通用 dsp 核的asic 芯片实现。
2、简单的叙述一下 dsp 芯片的发展概况?答:第一阶段, DSP 的雏形阶段( 1980 年前后)。
代表产品: S2811。
主要用途:军事或航空航天部门。
第二阶段, DSP 的成熟阶段( 1990 年前后)。
代表产品: TI 公司的 TMS320C20主要用途:通信、计算机领域。
第三阶段, DSP 的完善阶段( 2000 年以后)。
代表产品:TI 公司的 TMS320C54 主要用途:各个行业领域。
3、可编程 dsp 芯片有哪些特点?答: 1、采用哈佛结构( 1)冯。
诺依曼结构,( 2)哈佛结构( 3)改进型哈佛结构2、采用多总线结构 3.采用流水线技术4、配有专用的硬件乘法-累加器5、具有特殊的 dsp 指令6、快速的指令周期7、硬件配置强8、支持多处理器结构9、省电管理和低功耗4、什么是哈佛结构和冯。
诺依曼结构?它们有什么区别?答:哈佛结构:该结构采用双存储空间,程序存储器和数据存储器分开,有各自独立的程序总线和数据总线,可独立编址和独立访问,可对程序和数据进行独立传输,使取指令操作、指令执行操作、数据吞吐并行完成,大大地提高了数据处理能力和指令的执行速度,非常适合于实时的数字信号处理。
冯。
诺依曼结构:该结构采用单存储空间,即程序指令和数据共用一个存储空间,使用单一的地址和数据总线,取指令和取操作数都是通过一条总线分时进行。
第一章习题与思考题—\填空:1.Instruction Cycle(指令周期)是执行一条指令所需的时间,指令周期的单位是(nS纳秒)。
所以DSP单周期指令的周期也是(时钟周期)。
2.选择DSP芯片所需考虑的因素有(DSP芯片性能)、(片内硬件资源)、(价您、(DSP芯片的开发工具)等。
3.TMS320LF2407A控制器是专门为基于也业的应用而设计的。
其运算速度最大可为(40MIPS),最小指令周期为(25nS)o4.TMS320LF2407ADSP控制器有强大的外设功能,包括(时间管理器EVA,EVB)、(控制器局域网CAN)、(串行接口SPI, SCI)、(模/数转换器ADC)、(看门狗定时器)。
5.TMS320LF2407ADSP 芯片有RAM:(PARAM)>(SARAM),是(⑹位。
二、思考题:1.根据TI公司对DSP命名的方法。
解释给出芯片型号的各个字段的意义。
TMS 320 LF 2407APGE2.为何将TMS320x2000系列的DSP也称作DSP数字信号控制器或DSP单片机。
3.与TMS320x240x系列器件相比,TMS320x240xA器件增加了那些新特点。
运行速度加快30MHz——40MHz片上Flash/Rom中的代码可以加密;PDPINTX、CAPn、XINTn、和ADCSOC管脚有输入保护电路;PDPINTx管脚的状态反映在COMCONx寄存器中。
第二章习题与思考题—、填空:1.TMS320LF240xA系列DSP控制器采用了改进的(哈佛结构)总线,具有分离的(程序总线)和(数据总线),使用㈣级流水线作业。
2.TMS320LF240xA系列DSP控制器具有两套相互独立的(程序操作总线)和(数据操作总线),共有6套16位的内部总线构成,分别为(程序读总线PRDB、程序地址总线PAB、数据读总线DRDB、数据写总线DWDB、数据读地址总线DRAB、数据写地址总线DWAB)。
![DSP习题及解答[1]](https://uimg.taocdn.com/6feba42ab4daa58da0114acb.webp)
第一章引言1.一个存储单元有哪两个属性?寄存器与存储器有什么不同?一个存储单元的两个属性是:地址与值。
寄存器是特殊的存储器,读写寄存器可引发相关电路的动作。
2.由单片机构成的最小系统有哪几部分构成?由单片机构成的最小系统包括电源和晶体振荡器。
3.DSP是哪三个英文词的缩写?中文意义是什么?DSP是Digital Signal Processor的缩写,中文意义是数字信号处理器。
4.哈佛结构计算机与冯∙诺伊曼结构计算机有什么差别?哈佛结构计算机有独立的数据总线和程序总线,冯∙诺伊曼结构计算机数据和程序共用一套总线。
5.微控制器与微处理器有什么不同?微控制器内部可固化程序,而微处理器内部不含程序。
6.TMS320LF24xA系列单片机有几套总线?分别起什么作用?总线中数据线和地址线分别有多少条?最大可以访问多少存储单元?每个存储单元由多少位组成?TMS320LF24xA系列单片机有三套总线,分别是程序读总线、数据读总线和数据写总线。
每套总线中各有16条数据线和16条地址线,最大可以访问64K个存储单元,每个存储单元由16位组成。
7.什么是操作码?什么是操作数?操作码用于表示指令所要执行的动作,操作数表示指令所涉及的数据。
8.实现一条指令的功能要经过哪四个阶段?CPU为什么要采用流水线结构?实现一条指令的功能要经过“取指”、“译码”、“取操作数”和“执行”四个阶段,CPU采用流水线结构可以同时使多条指令处于不同的处理阶段,实现并行处理,提高CPU的指令吞吐率。
第二章寻址方式与主要寄存器操作1.有哪三种寻址方式?三种寻址方式是:立即数寻址、直接寻址和间接寻址。
2.指令LACL #10与LACL 10有什么区别?各为什么寻址方式?含义是什么?指令LACL #10将常数10装载到累加器,指令LACL 10将地址10(假设DP为0)处的值装载到累加器。
前者是立即数寻值,操作数在指令中;后者是直接寻址,操作数的地址最低7位在指令中。
《TMS320C54x DSP应用技术教程》部分习题答案注意:未提供的参考答案习题(因考试为开卷形式,部分在课堂讲过,部分需要自行思考归纳总结或编程),请参考PPT和书上示例,自行解答。
第1章绪论1.简述Digital Signal Processing 和Digital Signal Processor 之间的区别与联系。
答:前者指数字信号处理的理论和方法,后者则指用于数字信号处理的可编程微处理器,简称数字信号处理器。
数字信号处理器不仅具有可编程性,而且其数字运算的速度远远超过通用微处理器,是一种适合于数字信号处理的高性能微处理器。
数字信号处理器已成为数字信号处理技术和实际应用之间的桥梁,并进一步促进了数字信号处理技术的发展,也极大地拓展了数字信号处理技术的应用领域。
2.什么是DSP技术?答:DSP技术是指使用通用DSP处理器或基于DSP核的专用器件,来实现数字信号处理的方法和技术,完成有关的任务。
5.数字信号处理的实现方法有哪些?答:参见P3-4 1.1.3节。
6.DSP的结构特点有哪些?答:哈佛结构和改进的哈佛结构、多总线结构、流水线技术、多处理单元、特殊的DSP指令、指令周期短、运算精度高、硬件配置强。
7.什么是哈佛结构和冯洛伊曼结构?它们有什么区别?答:参见P5-6 1.2.2节。
8.什么是哈佛结构和冯.诺依曼结构?它们有什么区别?答:DSP处理器将程序代码和数据的存储空间分开,各空间有自己独立的地址总线和数据总线,可独立编址和独立访问,可对程序和数据进行独立传输,这就是哈佛结构。
以奔腾为代表的通用微处理器,其程序代码和数据共用一个公共的存储空间和单一的地址和数据总线,取指令和取操作数都是通过一条总线分时进行的,这样的结构称为冯·诺伊曼结构。
采用哈佛结构,可同时取指令和取操作数,并行地进行指令和数据的处理,从而可以大大地提高运算的速度,非常适合于实时的数字信号处理。
而冯·诺伊曼结构当进行高速运算时,取指令和取操作数是分时操作的,这样很容易造成数据传输通道的瓶颈现象,其工作速度较慢。
《DSP技术及应用》习题答案第1章绪论1.1 DSP的概念是什么?本书说指的DSP是什么?答:DSP有两个概念。
一是数字信号处理(Digital Signal Processing),指以数字形式对信号进行采集、变换、滤波、估值、增强、压缩、识别等处理;二是数字信号处理器(Digital Signal Processor),指是一种特别适合于进行数字信号处理运算的微处理器,其主要应用是实时快速地实现各种数字信号处理算法。
本书中的DSP主要指后者,讲述数字信号处理器的应用。
1.2 什么是哈佛结构和冯•诺伊曼结构?它们有什么区别?答:(1)冯·诺伊曼(Von Neuman)结构该结构采用单存储空间,即程序指令和数据共用一个存储空间,使用单一的地址和数据总线,取指令和取操作数都是通过一条总线分时进行.当进行高速运算时,不但不能同时进行取指令和取操作数,而且还会造成数据传输通道的瓶颈现象,其工作速度较慢。
(2)哈佛(Harvard)结构该结构采用双存储空间,程序存储器和数据存储器分开,有各自独立的程序总线和数据总线,可独立编址和独立访问,可对程序和数据进行独立传输,使取指令操作、指令执行操作、数据吞吐并行完成,大大地提高了数据处理能力和指令的执行速度,非常适合于实时的数字信号处理.1.3 已知一个16进制数3000H,若该数分别用Q0、Q5、Q15表示,试计算该数的大小.答:3000H=12288。
若用Q0表示,则该数就是12288;若用Q5表示,则该数就是12288*2—5=384;若用Q15表示,则该数就是12288*2—15=0。
3751。
4 若某一个变量用Q10表示,试计算该变量所能表示的数值范围和精度。
答:Q10能表示的数值范围是-32~31.9990234,其精度为2-101.5 若x=0.4567,试分别用Q15、Q14、Q5将该数转换为定点数.答:Q15:x*215=int(0。
第一章1.简述典型实时数字信号处理系统组成部分。
答:包括:抗混叠滤波器(Anti-aliasing filter)、模数转换器ADC(Analog-to-Digital Converter)、数字信号处理、数模转换器DAC(Digital-to-Analog Converter)和抗镜像滤波器(Anti-image filter) 。
2.简述X86处理器完成实时数字信号处理的优缺点。
答:利用X86处理器完成实时数字信号处理。
特点是处理器选择范围宽,主板及外设资源丰富,有多种操作系统可供选择,开发、调试较为方便;缺点是数字信号处理能力不强,硬件组成较为复杂,系统体积、重量较大,功耗较高,抗环境影响能力较弱。
3.简述数字信号处理器的主要特点。
答:(1)存储器采用哈佛或者改进的哈佛结构;(2)内部采用了多级流水;(3)具有硬件乘法累加单元;(4)可以实现零开销循环;(5)采用了特殊的寻址方式;(6)高效的特殊指令;(7)具有丰富的片内外设。
4.给出存储器的两种主要结构,并分析其区别。
答:存储器结构分为两大类:冯·诺依曼结构和哈佛结构。
冯·诺依曼结构的特点是只有一个存储器空间、一套地址总线和一套数据总线;指令、数据都存放在这个存储器空间中,统一分配地址,所以处理器必须分时访问程序和数据空间。
哈佛结构程序存储器空间和数据存储器空间分开,具有多套地址、数据总线,哈佛结构是并行体系结构,程序和数据存于不同的存储器空间,每个存储器空间独立编址、独立访问。
5.简述选择数字信号处理器所需要考虑的因素。
答:应考虑运算速度、算法格式和数据宽度、存储器类型、功耗和开发工具。
6.给出数字信号处理器的运算速度指标,并给出其具体含义。
答:常见的运算速度指标有如下几种:(1)指令周期:执行一条指令所需的最短时间,数值等于主频的倒数;指令周期通常以ns(纳秒)为单位。
例如,运行在200MHz的TMS320VC5510的指令周期为5ns。
第三章课后作业12、已知f(n)=x(n)+jy(n),x(n)与y(n)均为长度为N的实序列。
设F(k)=DFT{ EMBED Equation.KSEE3 \* MERGEFORMAT |)]f[n(N 0≤k≤N-1(1)F(k)= a,b为实数(2)F(k)=1+jN试求X(k)=DFT,Y(k)=DFT以及x(n)和y(n)解:由DFT共轭对称性知X(n)→X(k)=(k)jy(n)→jY(k)=(k)(1)因为F(k)=所以X(k)=(k)=[F(k)+(N-k)]=Y(k)=-j(k)=[F(k)-(N-k)]=X(n)==== 0≤n≤N-1又= 0≤n,m≤N-1x(n)= 0≤n≤N-1同理可得:y(n)= 0≤n≤N-1(2)F(k)=1+jN时X(k)=(k)=[F(k)+(N-k)]=1Y(k)=-j(k)=[F(k)-(N-k)]=NX(n)===y(n)==14、两个有限长序列x(n)和y(n)的零值区间为:x(n)=0 n<0,8≤ny(n)=0 n<0,20≤n对每个序列做20点DFT,即X(k)=DFT[x(n)] k=0,1,…,19Y(k)=DFT[y(n)] k=0,1,…,19如果F(k)=X(k)Y(k) k=0,1,…,19f(n)=IDFT[F(k)] k=0,1,…,19试问在哪些点上f(n)与x(n)*y(n)值相等,为什么?解:设(n)=x(n)*y(n) f(n)==IDFT[F(k)] =x(n)20y(n)(n)的长度为27,而f(n)的长度为20又两者关系为:f(n)=只有在上诉周期延拓序列中无重叠部分两者才相等所以 f(n)= (n)=x(n)*y(n) 7≤n≤1915、已知实序列x(n)的8点DFT的前5个值为0.25,0.125-j0.3018,0,0.125-j0.0518,0.(1)求X(k)的其余3点的值(2)X(n)=,求(k)=DFT[;(3)(n)=x(n),求=DFT[(n)解:(1)因为是x(n)实序列,所以X(k)=所以其余三点为:{X(5), X(6), X(7)}={0.125+j0.0518, 0, 0.125+j0.3018}(2)根据DFT的时域循环移位性质,=DFT[(n)=X(k)(3)=DFT[(n)=====X19、已知调幅信号的载波频率,调制信号频率,用FFT对其进行谱分析,试求:(1)最小记录时间(2)最低采样频率(3)最少采样点数解:(1)调制信号为单一频率正弦波时,已调幅信号为x(t)=cos(2πt+)[1+cos(2πt+)]所以,已调幅信号x(t) 只有3个频率: fc、 fc+fm、 fc-fm。
DSP原理与应用教程(张卫宁著)课后习题答案第3章(2014年10月整理—刘忠国)第三章习题答案:作业:3.2, 3.6, 3.7,3.8, 3.11, 3.17, 3.19,3.213.1. T MS320C54x的数据空间寻址方式各有什么特点?应该应用在什么场合?(教材涉及特点较少)答:TMS320C54x有7种基本的数据寻址方式:立即寻址,绝对寻址,累加器寻址,直接寻址,间接寻址,存储器映像寄存器寻址和堆栈寻址。
1、立即寻址:其特点是指令中包含有一个固定的立即数,操作数在指令中,因而运行较慢, 需要较多的存储空间。
立即寻址只能用于源操作数,做目标操作数无意义,它用于对寄存器初始化。
2、绝对寻址:可以寻址任一数据存储器中操作数,运行较慢,需要较多的存储空间。
它用于对寻址速度要求不高的场合。
3、累加器寻址:把累加器内容作为地址指向程序存储器单元。
它用于在程序存储器和数据存储器之间传送数据。
4、直接寻址:指令中包含数据存储器的低7位和DP或SP结合形成16位数据存储器地址,它寻址速度快,用于对寻址速度要求高的场合。
5、间接寻址:利用辅助寄存器内容作为地址指针访问存储器,可寻址64千字×16 位字数据存储空间中任何一个单元。
它用于按固定步长寻址的场合。
6、堆栈寻址:用于中断或子程序调用时,将数据保存或从堆栈中弹出。
7、存储器映像寄存器(MMR)寻址,是基地址为零的直接寻址,寻址速度快,它用于直接用MMR寄存器名快速访问数据存储器的0页。
3.2. 直接寻址有两种方式,它们是如何控制的?当SP =0100h,DP=2,偏移地址为50h时,分别寻址的是哪个存储空间的哪个地址单元?答:(1)直接寻址有DP和SP两种方式。
当CPL=0时,以数据页指针寄存器DP的9位为地址高9位,以指令中的7位偏移地址(dma)为地址低7位,共同构成16位数据存储单元的地址。
当CPL=1时,将堆栈指针SP的16位地址与指令中的7位地址相加,形成16位的数据存储器地址。
3.9习题1.计算下列各有限长序列的N 点离散傅立叶变换。
(1)0()11N x n n ≤≤-=(2))()(n n x δ=(3))()(0n n n x -=δ 100-≤≤N n (4))()(n R a n x N n= (5))()(0n R en x N n j ω=(6))()cos()(0n R n n x N ω= (7))()(2n R en x N mnN j π= 10-≤≤N m(8))()2sin()(n R mn Nn x N π= 10-≤≤N m解 (1) 2100()[()]010N jknN n k X k D F T x n ek N Nk π--=≠⎧===≤≤-⎨=⎩∑(2)210[()]()101N jknNn D F T x n n ek N πδ--===≤≤-∑(3)02210[()]()01N jknjkn NNn D F T x n n neek N ππδ---==-=≤≤-∑(4)21201[()]()011N N jknnNN jkn Na D F T x n aR n ek N a eππ---=-==≤≤--∑(5)000212()1[()]()011j NN jknj nNN j k n Ne D F T x n eR n ek N a eπωωπω---=-==≤≤--∑(6)2100[()]co s ()N jknNN n D F T x n n R n eπω--==∑0000002122()()1()2110111N jknj nj nN n j Nj Nj k j k NNeeee e k N aeaeπωωωωππωω---=--+=+--=+≤≤---∑(7)2210[()]()01N jm njknNNN n k m D F T x n eR n ek N Nk mππ--=≠⎧==≤≤-⎨=⎩∑(8)212[()]sin()N jknNN n D F T x n m n R n eNππ--==∑22211()20,,01,,2N jm njm nj knNNNn eeejk m k N m k N Nk m k N mj πππ---==-≠≠-⎧⎪=≤≤-⎨==-⎪⎩∑2.有限长序列)(n x 如题图3.1所示,画出序列)(1n x 和)(2n x 的波形。
)())3(()(661n R n x n x -= )())(()(552n R n x n x -=题图3.1解n3.已知⎩⎨⎧=,0,1)(k X km N m k 其他-=,,10-≤≤N k ,2/0N m <<,求)]([k X IDFT 。
解 2221()011[()]()[]N j knjm njN m nN NNk ID F T X k X k e eeN Nπππ--===+∑22co s()01m n n N NNπ=≤≤-4.已知序列)(1n x 和)(2n x 分别为)1(2)()(1-+=n n n x δδ,)()(42n R n x =,求)(1n x 和)(2n x 的6点圆周卷积。
解 解法一:112120()()()()(())()N N N m x n x n x n x m x n m R n -==⊗=-∑54660[()2(1)](())()m m m Rn m R n δδ==+--∑(0)1(1)3(2)3(3)3(4)2(5)0x x x x x x ======解法二:211()[()]1201jkNX k D F T x n ek N π-==+≤≤-23220()[()]01jknNn X k D F T x n ek N π-===≤≤-∑12122221300222313()()()[()()]1[(12)]1(12)[()2(1)]01N jkjkmjknNNNk m N jkjkmjknN NNm k m x n x n x n ID F T X k X k eeeN eeeNn m n m n N ππππππδδ---==---====⊗==+=+=-+--≤≤-∑∑∑∑∑以上表达式中N=6。
5.设)]([)(n x DFT k X =,)]([)(n y DFT k Y =,10-≤≤N k .若)())(()(n R m n x n y N N -=,证明: )()(2k X ek Y kmN jπ-=。
证明:()[()][(())()]N N Y k D F T y n D F T x n m R n ==-21021(())()(())N jknNN N n N jknN N n x n m R n ex n m eππ--=--==-=-∑∑令,n m l -=221()(())N mjkljkmNNN l mY k x l eeππ----==∑2212()()N jkljkmNNl jkmN x l eeX k eπππ---=-==∑6.设)(n x 的长度为N ,其离散傅立叶变换为)]([)(n x DFT k X =,10-≤≤N k 。
若⎩⎨⎧=0)()(n x n y 110-≤≤-≤≤rN n N N n ,)]([)(n y DFT k Y =,10-≤≤rN k 。
推导)(k Y 与)(k X 的关系。
解 21()[()]()rN jknrNn Y k D F T y n y n e π--===∑2211()()k N N jknjnrNN rn n x n ex n eππ----====∑∑(),k k X rr=为整数 10-≤≤rN k7.已知序列),()(n u a n x n= 10≤≤a ,对)(n x 作Z 变换并在单位圆上]2,0[π范围内等间隔采样N 点,采样值,)()(2kN j ez z X k X π==10-≤≤N k 。
求有限长序列)]([k X IDFT 。
解:0()[()]()nn X z Z T x n x n z∞-===∑2220()()()()jkNj kN jknnNz en n z eX k X z x n zx n eπππ∞∞--=======∑∑211()[()]()01N jknNN k x n ID F T X k X k en N Nπ-===≤≤-∑22211()000011()()()()()()1N N j kmj knj k m n NNNk m m k m r r n rNnrNr r nNx m eex m eNNx m m n rN x n rN au n rN aaaaπππδ-∞∞----====∞∞∞==-∞=∞∞+=====--=+=+==-∑∑∑∑∑∑∑∑∑()()1n N N Nax n R n a=-8.若)()(4n R n x =,求)(n x 的Z 变换)(z X ,频率函数)(ωj eX 和8点离散傅里叶变换)(k X ,并画出频率函数)(ωj eX 和离散傅里叶变换)(k X 的幅频特性图。
解 43411()()()1nnnn n n z X z x n zR n zzz-∞∞----=-∞=-∞=-====-∑∑∑33240sin 2()()()sin /2j j j nj nj nn n n X ex n eR n eeeωωωωωωω∞∞----=-∞=-∞=====∑∑∑2223773888840sin 2()()()07sin8jknjknjknjkn n n kX k x n eR n eeek kππππππ----=======≤≤∑∑∑ 9.已知)()()(n jy n x n f +=,)(n x 和)(n y 是长为N 的实序列,若j n f DFT k F 5.01)]([)(+==,试求)]([)(n x DFT k X =和()[()]k D F T y n Y =。
解 1()[()]()[()*()]12ep X k D F T x n F k F k F N k ===+-= 1()[()]()[()*()]0.52o p Y k D F T y n F k F k F N k ===--=10.用DFT 对实信号进行谱分析,要求频率分辨率Hz F 50≤,信号最高频率为Hz f 1000max =,试确定以下参数:(1)最小记录时间;(2)最大取样间隔;(3)最少采样点数;(4)若要求频率分辨率提高一倍,求最少采样点数。
解 (1)m in m ax10.02p T s F ==(2)m ax m ax10.52T m s f ==(3)m in m ax m in m ax m ax 240p T f N F T ===(4)m ax m in m ax220008025f N F ===。