通信网络程序设计(王晓东 西电版)第3章 串口网络编程
- 格式:ppt
- 大小:216.00 KB
- 文档页数:90
单片机MSP430与PC机串口通讯设计一、引言串口通信是指通过串行通信接口进行数据传输的一种通信方式。
单片机MSP430和PC机的串口通信设计可以实现二者之间的数据传输和通信交互。
本文将从串口介绍、硬件设计和软件实现等方面详细介绍该设计。
二、串口介绍串口是一种串行通信接口,常用的有RS232和RS485等。
RS232是一种使用较为广泛的串口通信协议。
RS232接口有三根线,分别为发送线Tx、接收线Rx和地线GND。
该协议规定,发送端与接收端之间的电平差为±3至±15V,其中正电平表示逻辑0,负电平表示逻辑1三、硬件设计1.MSP430硬件设计MSP430是一种低功耗的专用于嵌入式应用的16位RISC微控制器。
它具有丰富的外设资源,包括多个通用输入输出引脚(GPIO)和两个USART (UART)接口。
其中一个USART接口用于将MSP430与PC机连接。
2.PC机硬件设计PC机通过串口连接到MSP430。
首先,需要将PC机的串口RS232转换为TTL电平,即RS232转TTL电平转换器。
其次,将转换后的TTL电平通过杜邦线连接至MSP430的USART接口的Tx和Rx引脚。
四、软件实现1.MSP430软件设计(1)串口初始化:设置数据位长度、停止位、奇偶校验等。
(2)发送数据:将要发送的数据存入发送缓冲区,并使能发送中断。
(3)接收数据:开启接收中断,并将接收到的数据存入接收缓冲区。
(4)中断处理:发送中断和接收中断时,分别从发送缓冲区和接收缓冲区读取数据并发送/接收。
2.PC机软件设计(1)打开串口:设置串口参数,如波特率、数据位长度等。
(2)发送数据:向串口发送数据,可以通过打开的串口进行写入。
(3)接收数据:使用轮询或中断方式读取串口接收到的数据。
五、总结与展望本文详细介绍了单片机MSP430与PC机串口通信设计,主要包括了串口介绍、硬件设计和软件实现。
通过串口通信,MSP430和PC机可以实现数据传输和通信交互,从而满足各种嵌入式应用的需求。
嵌入式基于stm32串口通信课程设计嵌入式系统是近年来发展迅速的一种新型计算机系统,其特点是硬件与软件紧密结合,功能强大,具有体积小、功耗低、性能高等优点,广泛应用于工业控制、汽车电子、医疗设备等领域。
在嵌入式系统中,串口通信是一种常见且重要的通信方式,其通过串行传输数据,可以与其他设备进行数据交换。
在嵌入式系统的开发过程中,串口通信的设计是一项非常关键的工作。
本文将以基于STM32的串口通信课程设计为例,详细介绍串口通信的实现原理和相关技术。
首先,我们需要了解串口通信的基本原理。
串口通信一般包括发送端和接收端两个部分。
发送端将需要传输的数据转化为串行数据,并通过串口发送出去;接收端接收串口传输过来的数据,并将其转化为需要的格式。
串口通信需要通过一定的协议进行数据的传输,常见的协议有UART、USART、SPI等。
在基于STM32的串口通信课程设计中,我们可以使用STM32开发板作为嵌入式系统的硬件平台。
STM32是一款由ST公司推出的基于ARM Cortex-M内核的系列单片机,具有高性能、低功耗等特点。
在STM32中,有多个通用串行接口(USART)可用于实现串口通信功能。
我们可以通过编程控制STM32的USART模块,实现串口通信的发送和接收功能。
首先,我们需要初始化STM32的USART模块。
在初始化过程中,需要设置波特率、数据位数、校验位等参数,以适应不同的通信需求。
然后,我们需要编写发送函数和接收函数。
发送函数将需要传输的数据转化为串行数据,并通过USART发送出去;接收函数则负责接收USART传输过来的数据,并将其转化为需要的格式。
在接收函数中,我们还可以添加一些错误检测和容错机制,以确保数据的准确性。
在完成了USART的初始化工作后,我们还需要编写主程序来调用发送函数和接收函数,实现数据的发送和接收。
在主程序中,我们可以通过外部中断、定时器或其他触发方式来触发数据的发送和接收操作。
第24卷 第04期计 算 机 仿 真2007年04月 文章编号:1006-9348(2007)04-0271-04基于ADAM S与S i m uli nk的协同仿真技术及应用王晓东1,2,毕开波3,周须峰1(1.西北工业大学航天学院,陕西西安710072;2.空军工程大学工程学院,陕西西安710038;3.大连舰艇学院,辽宁大连116018)摘要:基于多学科协同建模与协同仿真的虚拟样机技术,已经成为现代复杂产品设计的一个重要手段,文中主要对ADAMS与Si mulink之间的协同仿真技术进行介绍。
通过分析协同仿真实现方式和两者提供的外部接口,探讨了ADAMS与Si mulink进行协同仿真的若干种方法,实现了两者在单机环境和网络环境下的交互式协同仿真,并以一个五自由度转台的控制器设计为例,验证了这些协同仿真方法的可行性和实用性。
支持网络环境下的远程协同仿真技术为跨区域的多领域部门之间进行产品协同设计提供了便利,是工程仿真软件发展的一个重要方面。
关键词:协同仿真;协同设计;虚拟样机;控制模块中图分类号:TP391.7;TP391.9 文献标识码:ATechnology and Applica ton of Co-si m ula tonBa sed on S i m uli nk&ADAM SWAN G X iao-dong1,2,B I Kai-bo3,ZHOU Xu-feng1(1.College of A stronautics,Northwestern Polytechnical University,Xi’an Shanxi710072,China;2.Engineering College of A ir Force Engineering University,Xi’an Shanxi710038,China;3.Dalian Navy Academy,Dalian L iaoning116018,China)ABSTRACT:V irtual p rototyp ing(VP)based on multi-discip linary co-modeling and co-si m ulation has beenan i m portant method for designing comp lex p roducts.This paper mainly discussed the technology of co-si mulation bet ween ADAM S and Si mulink.Firstly,some methods of co-si mulation were p resented after themodes of co-si mulation and external app lication interface were analyzed,so as to realize interactive co-si mulation bet ween ADAM S and Si mulink either in single host environment or net work environment.Anapp lication examp le of5-DOF motion p latfor m was p resented in the end to p rove these methods’feasibility andavailability.The technology of remote co-si mulation available in net work environment may be of great benefit tocollaborative p roducts design for multi-discip line&multi-depart m ent in distributing areas,standing for ani mportant aspect of engineering si mulation soft warte.KEYWO RD S:Co-si mulation;Collaborative design;V irtual p rototyp ing;Controls module1 引言随着计算机技术的普及和发展,利用软件进行辅助设计与分析已经成为产品设计的一项重要工作,但这些软件通常彼此之间各自独立作业,缺乏整体协同交互,设计中存在的隐患只有在物理样机上进行集成测试时才能得以发现,这导致设计效率下降,常常造成巨大的人力物力浪费[1]。
计算机网络实验RS232串口通信程序的编写RS232是一种常见的串行通信接口,用于在计算机和其他外部设备之间传输数据。
它广泛应用于各种设备和应用程序,如串口调试工具、点阵打印机等。
本文将介绍如何编写一个基本的RS232串口通信程序。
我们将使用C 语言和Linux操作系统来演示。
在开始编写程序之前,我们需要了解一些RS232串口的基本概念和通信协议。
RS232串口由发送线(TX)、接收线(RX)、控制线(如RTS、CTS、DTR和DSR)等组成。
通信时,发送方将数据从TX线发送到接收方的RX线,然后接收方通过RX线接收数据。
以下是一个简单的RS232串口通信程序示例:```c#include <stdio.h>#include <stdlib.h>#include <fcntl.h>#include <termios.h>#include <unistd.h>int maiint fd = open("/dev/ttyS0", O_RDWR , O_NOCTTY); // 打开串口设备if (fd == -1)perror("打开串口失败");exit(1);}struct termios options;tcgetattr(fd, &options); // 获取当前串口设置//设置波特率为9600cfsetispeed(&options, B9600);cfsetospeed(&options, B9600);//设置数据位为8位,无奇偶校验,停止位为1位options.c_cflag &= ~PARENB;options.c_cflag &= ~CSTOPB;options.c_cflag &= ~CSIZE;options.c_cflag ,= CS8;//更新串口设置tcsetattr(fd, TCSANOW, &options);char buffer[255];while (1)ssize_t len = read(fd, buffer, sizeof(buffer)); // 从串口读取数据if (len == -1)perror("读取串口失败");exit(1);}printf("接收到数据:%.*s\n", len, buffer);ssize_t nwrite = write(fd, buffer, len); // 向串口写入数据if (nwrite == -1)perror("写入串口失败");exit(1);}}close(fd);return 0;```该程序首先打开串口设备`/dev/ttyS0`,如果打开失败则会输出错误信息并退出。
Lua串口通讯时序引言串口通讯是计算机与外部设备之间进行数据交换的主要方式之一。
在嵌入式系统和物联网应用中,串口通讯起着至关重要的作用。
本文将详细介绍在Lua语言中使用串口进行通讯的时序。
串口通讯原理串口通讯是通过串口协议来实现的。
串口协议是一种用于在计算机和外部设备之间传输数据的标准化协议。
常见的串口通讯协议有RS232、RS485、UART等。
Lua语言中的串口通讯Lua是一种轻量级的脚本语言,常用于嵌入式系统和物联网应用的开发。
在Lua语言中,可以通过串口模块进行串口通讯。
Lua中的串口模块Lua提供了一个名为serial的串口模块,可以通过该模块来实现串口通讯。
以下是串口模块的基本用法:local serial = require("serial")-- 打开串口local port, err = serial.open("/dev/ttyUSB0")if not port thenprint("无法打开串口:" .. err)returnend-- 设置串口参数port:setBaudRate(serial.BAUD_9600)port:setDataBits(serial.DATA_8)port:setStopBits(serial.STOP_1)port:setParity(serial.PARITY_NONE)-- 发送数据local data = "Hello, world!"port:write(data)-- 接收数据local len, rxData = port:read(10) -- 最多读取10字节的数据-- 关闭串口port:close()Lua串口通讯时序Lua串口通讯的时序图如下所示:sequenceDiagramparticipant 程序 as 程序participant 串口模块 as 串口模块程序->>串口模块: 打开串口activate 串口模块串口模块-->>程序: 返回串口对象deactivate 串口模块程序->>串口模块: 设置串口参数activate 串口模块程序->>串口模块: 发送数据activate 串口模块串口模块->>外部设备: 发送数据deactivate 串口模块程序->>串口模块: 接收数据activate 串口模块外部设备->>串口模块: 返回数据串口模块-->>程序: 返回数据deactivate 串口模块程序->>串口模块: 关闭串口activate 串口模块串口模块-->>程序: 关闭成功deactivate 串口模块上述时序图中,程序首先通过serial.open函数打开串口,该函数会返回一个串口对象。
c++串口通信方面的书籍
在C++串口通信方面,有一些经典的书籍可以作为参考和学习的资源。
以下是我推荐的几本书籍:
1. 《C++串口编程与通信原理》(作者,王斌),这本书从基础的串口通信原理开始讲解,然后介绍了C++串口编程的相关知识和技巧。
它包含了大量的实例和案例,有助于读者深入理解串口通信的实际应用。
2. 《Linux下C/C++串口编程》(作者,刘凯),这本书主要介绍了在Linux环境下使用C/C++进行串口编程的方法和技巧。
它详细讲解了串口的基本原理、Linux下串口设备的操作以及串口通信的实现方法,对于想要在Linux平台上进行串口通信开发的读者来说是一本很好的参考书籍。
3. 《C++串口通信编程实战》(作者,陈昊),这本书通过实战的方式,介绍了C++串口通信的基本原理和实现方法。
它包含了大量的示例代码和实际项目案例,可以帮助读者快速掌握串口通信的开发技巧。
4. 《C++网络与串口通信编程》(作者,李洪涛),这本书主要介绍了C++网络通信和串口通信的基本原理和实现方法。
它涵盖了TCP/IP网络编程、串口通信协议、数据传输等方面的知识,并通过实例代码演示了如何使用C++进行网络和串口通信开发。
5. 《C++高效串口通信编程》(作者,刘金鑫),这本书主要介绍了如何使用C++进行高效的串口通信开发。
它从串口通信的基本原理和串口设备的操作开始讲解,然后介绍了如何优化串口通信的性能和稳定性,对于想要提升串口通信程序效率的读者来说是一本不错的选择。
这些书籍涵盖了C++串口通信的基础知识、实践经验和开发技巧,读者可以根据自己的需要选择适合自己的一本来学习和参考。
希望对你有帮助!。
基本串口通信程序设计串口通信是指通过串行接口进行数据传输的一种通信方式。
串口通信通常用于短距离的数据传输,具有稳定性强、传输速率低的特点。
本文将介绍串口通信的基本原理和程序设计。
一、串口通信基本原理串口通信是通过串行接口将数据一位一位地传输的通信方式。
串口通信的基本原理是使用两根信号线进行通信:一根是传输数据的信号线(TX),负责向外发送数据;另一根是接收数据的信号线(RX),负责接收外部发送过来的数据。
二、串口通信程序设计步骤1. 打开串口:首先需要通过操作系统提供的串口接口函数,打开需要使用的串口。
在Windows系统中,可以使用CreateFile函数打开串口;在Linux系统中,可以使用open函数打开串口。
3. 发送数据:使用WriteFile函数(Windows系统)或write函数(Linux系统),向串口发送需要传输的数据。
4. 接收数据:使用ReadFile函数(Windows系统)或read函数(Linux系统),从串口接收数据。
5. 关闭串口:数据传输完成后,需要关闭串口,使用CloseHandle函数(Windows系统)或close函数(Linux系统)即可关闭串口。
三、串口通信程序设计示例(Windows系统)下面是一个简单的串口通信程序设计示例,实现了从串口接收数据并将接收的数据原样返回的功能。
#include <iostream>#include <windows.h>int mainHANDLE hSerial;DCB dcbSerialParams = {0}; // 串口参数hSerial = CreateFile("COM1", GENERIC_READ , GENERIC_WRITE, 0, NULL, OPEN_EXISTING, FILE_ATTRIBUTE_NORMAL, NULL); // 打开串口dcbSerialParams.DCBlength = sizeof(dcbSerialParams);std::cout << "Error getting serial port state\n";return 1;}dcbSerialParams.BaudRate = CBR_9600;dcbSerialParams.ByteSize = 8;dcbSerialParams.StopBits = ONESTOPBIT;dcbSerialParams.Parity = NOPARITY;std::cout << "Error setting serial port state\n";return 1;}return 1;}char buffer[100];DWORD bytesRead;while (1)if (ReadFile(hSerial, buffer, sizeof(buffer), &bytesRead, NULL) && bytesRead > 0)std::cout << "Received data: " << buffer << std::endl;DWORD bytesWritten;if (!WriteFile(hSerial, buffer, bytesRead, &bytesWritten, NULL))std::cout << "Error writing to serial port\n";return 1;}}}CloseHandle(hSerial); // 关闭串口return 0;以上程序打开串口COM1,设置波特率为9600,数据位为8位,停止位为1位。
摘要随着计算机技术的发展和推广,利用串口进行数据通讯在通讯领域中占有着重要的地位。
为了方便和快速的通过 Internet 网络访问串口服务器的串口,本课题把串口通信集成到 Windows 服务,Windows 服务完成串口通信的基本操作。
由文中详细描述了串口通信服务的原理和工作流程,还列举出了相关的核心代码。
用流程图的方式来描述了各个模块的逻辑实现。
串口通信服务中采用安全队列的机制来控制多线程访问多串口。
在开发中按照软件工程的流程,从需求分析到概要设计从详细设计到编码,以及最后的测试,利用软件工程的工具管理开发代码和文档。
此外,还开发出了客户端来测试该服务工作是否正常。
经过测试服务工作正常,能通过网络连接到服务器完成串口的通信。
最后总结了开发和设计的不足之处,程序还有待进一步完善。
关键词:串口通信;Windows 服务;安全队列;多线程AbstractWith the development of computer technology and to promote theuse of serial data communication occupies an important positionin the communications field. In order to easily and quickly through the Internet network to access the serial server serial, the subjectof serialcommunication integrated intotheWindows services,Windows services to complete the basic operation of the serial communication. By the paper describes in detail theprinciplesand workflow of the serialcommunication, alsocited the corecode. Flowchart way todescribe the logic of eachmodule. Serialcommunication services usedin the security queue mechanismtocontrol the multi-thre aded access to morethan serial.Development in accordance with the softwareengineeri ngprocess,fromrequirements analysisto outlinedesign, detaileddesign to coding, and fi nal testing, the use of software engineering tools for managing the development of code and documentation. Also developed a client to test the service is working properly. After the normal work of testing services,through the network to connect to the server to complete theserial communication. Concluded the development and design ofthe inadequacies of the program remains to be further improved.Keywords:serialcommunication;Windowsservice; securityqueue; multi-thre aded目录摘要 (1)Abstract (2)第一章引言 (5)1.1 课题背景 (5)1.2 研究现状 (5)1.3 研究目的及意义 (6)第二章开发技术简介 (7)2.1串行通信简介 (7)2.2 vc++简介 (7)2.3 USB接口技术简介 (9)2.4 USB通信参考模型 (9)2.5 USB 接口的通讯原理 (10)2.5.1USB 设备的接入 (10)2.5.2 USB 设备的识别 (10)2.6功能需求 (11)2.6.1 服务器端 (11)2.6.2 串口通信 (11)2.6.3 客户端 (11)2.7设计方案 (11)2.7.1服务器端 (11)2.7.2串口通信 (12)2.7.3 客户端 (12)第三章系统程序设计 (13)3.1串口通讯的程序设计 (13)3.2 通信协议 (14)第四章系统程序的主要功能 (15)4.1 程序功能 (15)4.1.1参数设置功能 (15)4.1.2参数显示功能 (15)4.1.3打开串口功能 (15)4.1.4关闭串口功能 (15)4.1.5接收数据功能 (15)4.1.6发送数据功能 (15)4.1.7清空数据接收区功能 (15)4.1.8清空数据发送区功能 (15)4.1.9自动发送功能 (15)4.1.10十六进制显示功能 (15)4.1.11十六进制发送功能 (15)4.2 程序运行平台 (15)4.3总体设计 (16)4.4程序类的说明 (16)4.5模块分析 (18)4.5.1参数设置和显示模块 (18)4.5.2打开串口模块 (20)4.5.3发送数据模块 (21)4.5.4自动发送模块 (22)4.5.5接收数据模块 (22)4.5.6清空接收区模块 (23)4.5.7清空发送区模块 (23)4.5.8关闭串口模块 (24)第五章系统测试 (25)5.1 系统测试 (25)5.2 测试目的 (25)5.3 测试结果 (25)总结 (27)参考文献 (28)致谢 (29)第一章引言串口应用是一种常见的应用技术。
1.单片机串行通信的概述在通信领域内,有两种数据通信方式:并行通信和串行通信。
随着计算机网络化和微机分级分布式应用系统的发展,通信的功能越来越重要。
通信是指计算机与外界的信息传输,既包括计算机与计算机之间的传输,也包括计算机与外部设备,如终端、打印机和磁盘等设备之间的传输。
串行通信是指使用一条数据线,将数据一位一位地依次传输,每一位数据占据一个固定的时间长度。
其只需要少数几条线就可以在系统间交换信息,特别使用于计算机与计算机、计算机与外设之间的远距离通信。
使用串口通信时,发送和接收到的每一个字符实际上都是一次一位的传送的,每一位为1或者为0。
在串行通信中,把通信接口只能发送或接收的单向传送办法叫单工传送;而把数据在甲乙两机之间的双向传递,称之为双工传送。
在双工传送方式中又分为半双工传送和全双工传送。
半双工传送是两机之间不能同时进行发送和接收,任一时该,只能发或者只能收信息。
51系列单片机有一个可编程的全双工串行通信接口,它可作异步接收发送器用,也可做同步移位寄存器用,其帧格式可有8位、10位或11位,并能设置各种波特率,给使用带来很大的灵活性。
51系列单片机有两个物理上独立的接收、发送缓冲器SBUF,它们只占用同一地址99H,可同时发送、接送数据。
发送缓冲器只能写入,不能读出,接收缓冲器只能读出、不能写入。
串行发送接收的速率与波特率发生器产生的移位脉冲同频。
51系列单片机用定时器T1或直接用CPU时钟作为通信波特率发生器的输入,在串行接口的不同工作方式中,波特率发生器从两个输入信号中选择一个分频,产生移位脉冲来同步串口的接收和发送,移位脉冲的速率即是波特率。
接收器是双缓冲结构,在前一个字节被从接收缓冲器SBUF读出之前,第二字节即开始被接收。
但是,若在第二个字节接收完毕后,前一个字节还未被CPU 读取的话,第二个字就会覆盖第一个字节,造成第一个字节的丢失。
接收器是双缓冲结构,串行口的发送和接收都是以特殊功能寄存器SBUF的名义进行读或写的。
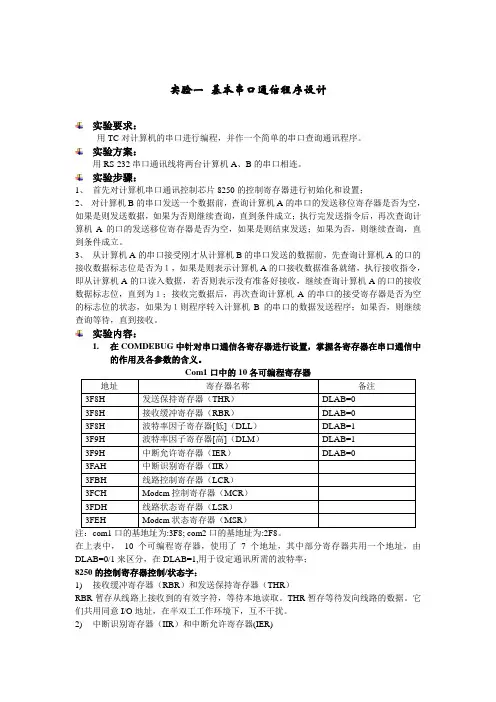
实验一基本串口通信程序设计实验要求:用TC对计算机的串口进行编程,并作一个简单的串口查询通讯程序。
实验方案:用RS-232串口通讯线将两台计算机A、B的串口相连。
实验步骤:1、首先对计算机串口通讯控制芯片8250的控制寄存器进行初始化和设置;2、对计算机B的串口发送一个数据前,查询计算机A的串口的发送移位寄存器是否为空,如果是则发送数据,如果为否则继续查询,直到条件成立;执行完发送指令后,再次查询计算机A的口的发送移位寄存器是否为空,如果是则结束发送;如果为否,则继续查询,直到条件成立。
3、从计算机A的串口接受刚才从计算机B的串口发送的数据前,先查询计算机A的口的接收数据标志位是否为1,如果是则表示计算机A的口接收数据准备就绪,执行接收指令,即从计算机A的口读入数据,若否则表示没有准备好接收,继续查询计算机A的口的接收数据标志位,直到为1;接收完数据后,再次查询计算机A的串口的接受寄存器是否为空的标志位的状态,如果为1则程序转入计算机B的串口的数据发送程序;如果否,则继续查询等待,直到接收。
实验内容:1.在COMDEBUG中针对串口通信各寄存器进行设置,掌握各寄存器在串口通信中的作用及各参数的含义。
Com1口中的10各可编程寄存器地址寄存器名称备注3F8H 发送保持寄存器(THR)DLAB=03F8H 接收缓冲寄存器(RBR)DLAB=03F8H 波特率因子寄存器[低](DLL)DLAB=13F9H 波特率因子寄存器[高](DLM)DLAB=13F9H 中断允许寄存器(IER)DLAB=03FAH 中断识别寄存器(IIR)3FBH 线路控制寄存器(LCR)3FCH Modem控制寄存器(MCR)3FDH 线路状态寄存器(LSR)3FEH Modem状态寄存器(MSR)注:com1口的基地址为:3F8; com2口的基地址为:2F8。
在上表中,10个可编程寄存器,使用了7个地址,其中部分寄存器共用一个地址,由DLAB=0/1来区分,在DLAB=1,用于设定通讯所需的波特率;8250的控制寄存器控制/状态字:1)接收缓冲寄存器(RBR)和发送保持寄存器(THR)RBR暂存从线路上接收到的有效字符,等待本地读取。
C#串⼝通信实现⽅法本⽂实例讲述了C#串⼝通信实现⽅法。
分享给⼤家供⼤家参考。
具体⽅法如下:通过COM1发送数据,COM2接收数据。
当COM2接收完本次发送的数据后,向COM1发送信息通知COM1本次数据已发完,COM1接到通知后,再发下⼀段数据。
这样可以确保每次发送的数据都可以被正确接收。
代码如下:复制代码代码如下:using System;using System.Collections.Generic;using ponentModel;using System.Data;using System.Drawing;using System.Linq;using System.Text;using System.Windows.Forms;using System.IO.Ports;using System.Threading;using Utils;namespace 串⼝通信{public partial class Form1 : Form{#region 变量/// <summary>/// 启动还是停⽌,true起动,false停⽌/// </summary>public static bool start = true;/// <summary>/// 串⼝资源/// </summary>private static SerialPort serialPort1 = null;/// <summary>/// 串⼝资源/// </summary>private static SerialPort serialPort2 = null;/// <summary>/// 成功次数/// </summary>private static int successCount = 0;/// <summary>/// 失败次数/// </summary>private static int errorCount = 0;/// <summary>/// 上次计算的总次数/// </summary>private static int lastCount = 0;/// <summary>/// 定时器/// </summary>private System.Windows.Forms.Timer timer = new System.Windows.Forms.Timer();#endregion#region Form1public Form1(){InitializeComponent();}#region Form1_Loadprivate void Form1_Load(object sender, EventArgs e){serialPort1 = new SerialPort("COM1");serialPort1.DataReceived += new SerialDataReceivedEventHandler(serialPort_DataReceived1); serialPort1.Open();serialPort2 = new SerialPort("COM2");serialPort2.DataReceived += new SerialDataReceivedEventHandler(serialPort_DataReceived2); serialPort2.Open();}#endregion#region Form1_FormClosedprivate void Form1_FormClosed(object sender, FormClosedEventArgs e){serialPort1.Close();serialPort1.Dispose();serialPort2.Close();serialPort2.Dispose();}#endregion#region btnStart_Clickprivate void btnStart_Click(object sender, EventArgs e){start = true;SendData();timer.Interval = 500;timer.Tick += new EventHandler(delegate(object obj, EventArgs eventArgs){if (lastCount == 0){lastCount = successCount + errorCount;}else{int cnt = successCount + errorCount - lastCount;cnt = Data.Length * cnt / 1024 * (1000 / timer.Interval);double total = (successCount + errorCount) * Data.Length / 1024.0;InvokeDelegate invokeDelegate = delegate(){label3.Text = cnt.ToString() + "KB/S " + total.ToString("#.0") + "KB";};InvokeUtil.Invoke(this, invokeDelegate);lastCount = successCount + errorCount;}});timer.Start();}#endregion#region btnStop_Clickprivate void btnStop_Click(object sender, EventArgs e){start = false;timer.Stop();timer.Dispose();timer = new System.Windows.Forms.Timer();}#region 接收串⼝数据事件/// <summary>/// 接收串⼝数据事件/// </summary>/// <param name="sender"></param>/// <param name="e"></param>public void serialPort_DataReceived1(object sender, SerialDataReceivedEventArgs e) {if (serialPort1.ReadLine() != null){successCount++;SendData();}}/// <summary>/// 接收串⼝数据事件/// </summary>/// <param name="sender"></param>/// <param name="e"></param>public void serialPort_DataReceived2(object sender, SerialDataReceivedEventArgs e) {List<byte> bList = new List<byte>();int i = 0;while (serialPort2.BytesToRead > 0){byte[] bArr = new byte[serialPort2.BytesToRead];i += serialPort2.Read(bArr, 0, bArr.Length);bList.AddRange(bArr);}serialPort2.WriteLine("success");string s = ASCIIEncoding.UTF8.GetString(bList.ToArray());InvokeDelegate invokeDelegate = delegate(){textBox2.Text = s;};InvokeUtil.Invoke(this, invokeDelegate);if (s != Str){errorCount++;invokeDelegate = delegate(){label2.Text = errorCount + "次不相等(失败)";};InvokeUtil.Invoke(this, invokeDelegate);}else{invokeDelegate = delegate(){label1.Text = successCount + "次相等(成功)";};InvokeUtil.Invoke(this, invokeDelegate);}}#endregion#region 发送数据private void SendData(){if (start){Thread thread = new Thread(new ParameterizedThreadStart(delegate(object obj) {InvokeDelegate invokeDelegate = delegate(){textBox1.Text = Str;};InvokeUtil.Invoke(this, invokeDelegate);serialPort1.Write(Data, 0, Data.Length);}));thread.Start();}}#endregion#region 数据private static byte[] data = null;/// <summary>/// 数据/// </summary>private static byte[] Data{get{if (data == null){data = ASCIIEncoding.UTF8.GetBytes(Str);}return data;}}#endregion#region 获取字符串private static string str = null;/// <summary>/// 字符串/// </summary>private static string Str{get{if (str == null){StringBuilder sb = new StringBuilder();for (int i = 0; i < 270; i++){sb.Append("计算机程序");}str = sb.ToString();}return str;}}#endregion}}辅助代码如下:复制代码代码如下:using System;using System.Collections.Generic;using System.Text;using System.Windows.Forms;namespace Utils{/// <summary>/// 跨线程访问控件的委托/// </summary>public delegate void InvokeDelegate();/// <summary>/// 跨线程访问控件类/// </summary>public class InvokeUtil{/// <summary>/// 跨线程访问控件/// </summary>/// <param name="ctrl">Form对象</param>/// <param name="de">委托</param>public static void Invoke(Control ctrl, Delegate de){if (ctrl.IsHandleCreated){ctrl.BeginInvoke(de);}}}}复制代码代码如下:using System;using System.Collections.Generic;using System.Linq;using System.Text;using Microsoft.Win32;using System.Security.Permissions;using System.IO.Ports;using System.Security;namespace Utils{/// <summary>/// 串⼝资源⼯具类/// </summary>public class SerialPortUtil{#region 获取本机串⼝列表,包括虚拟串⼝/// <summary>/// 获取本机串⼝列表,包括虚拟串⼝/// </summary>public static string[] GetCOMList(){List<string> list = new List<string>();foreach (string portName in SerialPort.GetPortNames()) {list.Add(portName);}return list.ToArray();}#endregion#region 从注册表获取本机串⼝列表/// <summary>/// 从注册表获取本机串⼝列表/// </summary>public static string[] GetPortNames(){RegistryKey localMachine = null;RegistryKey key2 = null;string[] textArray = null;//这⾥有个断⾔,判断该注册表项是否存在new RegistryPermission(RegistryPermissionAccess.Read,@"HKEY_LOCAL_MACHINE\HARDWARE\DEVICEMAP\SERIALCOMM").Assert();try{localMachine = Registry.LocalMachine;key2 = localMachine.OpenSubKey(@"HARDWARE\DEVICEMAP\SERIALCOMM", false); if (key2 != null){string[] valueNames = key2.GetValueNames();textArray = new string[valueNames.Length];for (int i = 0; i < valueNames.Length; i++){textArray[i] = (string)key2.GetValue(valueNames[i]);}}}finally{if (localMachine != null){localMachine.Close();}if (key2 != null){key2.Close();}CodeAccessPermission.RevertAssert();}if (textArray == null){textArray = new string[0];}return textArray;}#endregion}}希望本⽂所述对⼤家的C#程序设计有所帮助。
通信工程师习题集目录上篇新技术、新业务知识 (6)第一章基础知识 (6)第二章现代电信网 (15)第三章现代电信技术 (33)第四章电信业务 (48)第五章电信市场营销................................................................................... 错误!未定义书签。
下篇通信专业知识 .. (66)一、无线通信专业 .............................................. 错误!未定义书签。
第一章无线通信概述................................................................................... 错误!未定义书签。
第二章微波通信 ........................................................................................... 错误!未定义书签。
第三章卫星通信 ........................................................................................... 错误!未定义书签。
第四章无线市话通信................................................................................... 错误!未定义书签。
二、移动通信专业 (66)第一章移动通信概述 (66)第二章移动通信网 (76)第三章移动通信的无线覆盖技术 (84)第四章干扰和噪声 (91)第五章移动通信的电波传播 (97)第六章基站控制器(BSC) (102)第七章GPRS系统介绍 (111)第八章WCDMA系统介绍 (125)三、有线传输专业 .............................................. 错误!未定义书签。
串口编程的一般步骤及相关函数讲解串口编程是指通过串口与外部设备进行通信的程序设计。
一般步骤包括串口初始化、设置串口参数、打开串口、发送数据、接收数据和关闭串口等。
1. 串口初始化:首先需要导入串口编程相关的库文件,如pyserial 库。
然后通过serial.Serial(函数创建一个串口对象,指定串口号、波特率、停止位、数据位等参数,如:``````这里将串口号设置为/dev/ttyUSB0,波特率设置为9600,超时时间设置为1秒。
2.设置串口参数:通过串口对象的相关方法设置串口参数,如:```serial_port.setBaudrate(9600)serial_port.setParity(serial.PARITY_NONE)serial_port.setStopbits(serial.STOPBITS_ONE)serial_port.setByteSize(serial.EIGHTBITS)```这里设置了波特率为9600,无奇偶校验位,1位停止位,8位数据位。
3. 打开串口:使用串口对象的open(方法打开串口,如:serial_port.open```注意,打开串口之前要确保串口没有被其他程序占用。
4. 发送数据:使用串口对象的write(方法向串口发送数据,如:```data = 'Hello, World!'serial_port.write(data.encode()```这里将字符串'Hello, World!'转码为字节型数据并发送到串口。
5. 接收数据:使用串口对象的read(方法从串口读取数据,如:```received_data = serial_port.read(10)print(received_data.decode()```这里从串口读取10字节的数据,并将其解码为字符串输出。
6. 关闭串口:使用串口对象的close(方法关闭串口,如:```serial_port.close在程序结束时,记得关闭串口以释放资源。
串口控制源码web
一、串口通信基本概念
串口通信(Serial Communication)是一种计算机硬件接口通信方式,通过串行传输数据。
在嵌入式系统中,串口通信广泛应用于与外部设备进行数据交互。
Web串口控制是一种基于网络的远程控制技术,使得用户可以通过网页界面实时控制嵌入式设备。
二、串口控制源码web的实现原理
1.串口服务器:负责将串口数据转换为网络数据,并进行数据传输。
2.Web服务器:提供网页界面,用户通过浏览器进行操作。
3.客户端:用户端浏览器,用于与Web服务器进行交互。
三、具体实现步骤
1.准备硬件:选择合适的串口设备、开发板和串口服务器。
2.编写串口控制程序:根据实际需求,编写控制嵌入式设备的串口通信程序。
3.编写Web服务器程序:使用前后端技术(如HTML、CSS、JavaScript 等)搭建Web界面,实现与串口服务器的数据交互。
4.部署与调试:将编写好的程序部署到服务器,并进行调试,确保功能正常。
四、代码解析与优化建议
1.解析:分析代码结构,了解各个模块的功能及相互关系。
2.优化建议:
- 提高代码可读性:使用清晰的命名规范、添加注释等。
- 优化算法:针对性能瓶颈,采用更高效的算法或数据结构。
- 模块化:将功能划分为独立的模块,便于维护与升级。
五、总结与展望
本文介绍了串口控制源码web的实现原理和具体实现步骤。
通过掌握这些知识,开发者可以更好地远程控制嵌入式设备,实现智能化的应用场景。
基于串口通信的系统软件开发随着科技的不断发展和进步,计算机技术得到了广泛的应用和发展。
其中,串口通信技术作为常见的数据通信方式,给系统软件开发带来了便利。
本文将针对基于串口通信的系统软件开发展开探讨。
一、串口通信概述串口通信(Serial Communication)是一种传输数据的方式,它将数据位串联成一串数据并使用一根电缆进行传输,其传输速率和数据格式是按照特定的协议进行约定的。
串口通信与并口通信相比具有编程简单、传输距离远、容错性好、可靠性高等优势,并且适用于连接一些较小设备,如鼠标、电视机和打印机等。
串口通信标准包括RS-232、RS-422、RS-485等,其中,RS-232是最基础的串行通信标准,它规定了信号电平、通信协议等内容,RS-232通常被用于许多电子产品中,如个人电脑、工控设备等。
二、基于串口通信的系统软件开发在实际应用中,基于串口通信的系统软件开发,需要根据具体应用场景进行合理的协议、数据格式约定,从而保证数据的传输和处理的正确性,下面将讲述具体的开发步骤:1. 端口和波特率设置在使用串口通信前,需要先确定所使用的串口、波特率等相关参数。
通常,串口通信的接口为RS-232,其所连接的设备称为数据终端设备(Data Terminal Equipment,DTE),而通常计算机的串口接口为DTE。
因此,在进行基于串口通信的系统软件开发前,需要明确串口通信的数据发送和接收的端口和波特率等相关参数。
2. 数据处理系统软件在进行串口通信时,通常会传输一些数据,所以,在开发基于串口通信的系统软件时,需要考虑数据在传输过程中的处理方式。
通常,系统软件会采用特定的数据格式和协议,如协议包、协议头等,从而确保数据传输的正确性和可靠性。
并且,在串口通信数据处理中,还需要根据数据内容进行相应的解析和处理,以实现预期的功能。
3. 开发串口通信程序在确定了端口、波特率和数据处理方式后,需要根据实际需要进行串口通信程序的开发。