舵机各种品牌(国外和国内)
- 格式:doc
- 大小:129.50 KB
- 文档页数:3

舵机基础知识单选题100道及答案解析1. 舵机主要用于()A. 控制速度B. 改变方向C. 增加动力D. 稳定平衡答案:B解析:舵机的主要作用是改变方向。
2. 舵机通常由()驱动。
A. 直流电机B. 步进电机C. 伺服电机D. 交流电机答案:C解析:舵机通常由伺服电机驱动。
3. 舵机的控制信号一般是()A. 模拟信号B. 数字信号C. 脉冲信号D. 正弦信号答案:C解析:舵机的控制信号一般是脉冲信号。
4. 舵机的转动角度取决于()A. 电压大小B. 电流大小C. 脉冲宽度D. 脉冲频率答案:C解析:舵机的转动角度取决于脉冲宽度。
5. 常见的舵机旋转角度范围是()A. 0 - 90 度B. 0 - 180 度C. 0 - 270 度D. 0 - 360 度答案:B解析:常见舵机的旋转角度范围是0 - 180 度。
6. 舵机的精度主要取决于()A. 电机性能B. 齿轮精度C. 控制电路D. 以上都是答案:D解析:舵机的精度受到电机性能、齿轮精度和控制电路等多方面因素的影响。
7. 以下哪种不是舵机的应用场景()A. 机器人关节B. 无人机姿态控制C. 汽车发动机D. 模型飞机方向控制答案:C解析:汽车发动机不是舵机的应用场景。
8. 舵机的响应速度主要与()有关。
A. 电机转速B. 齿轮比C. 控制算法D. 以上都是答案:D解析:舵机的响应速度与电机转速、齿轮比和控制算法等都有关系。
9. 为了提高舵机的扭矩,可以()A. 增加电压B. 减小齿轮比C. 使用更大功率的电机D. 以上都是答案:D解析:增加电压、减小齿轮比、使用更大功率的电机都可以提高舵机的扭矩。
10. 舵机在工作时发热的主要原因是()A. 电流过大B. 摩擦损耗C. 电机效率低D. 以上都是答案:D解析:电流过大、摩擦损耗、电机效率低等都会导致舵机工作时发热。
11. 以下哪种舵机的精度较高()A. 塑料齿轮舵机B. 金属齿轮舵机C. 数字舵机D. 模拟舵机答案:C解析:数字舵机的精度通常较高。

电动航模常用设备介绍电动航模的常用设备有电机、电调、舵机、遥控器、电池、螺旋桨等。
一、电机电机主要分为有刷电机和无刷电机两种,有刷电机就是有电刷的电机,无刷电机则没有电刷。
有刷电机目前飞机模型上不常使用,故不多做详细介绍。
无刷电机相比有刷电机而言,效率更高,功率更大,低转速时扭力特性更好。
是目前电动航模的大多数选择。
无刷电机分为内转子和外转子,内转子就壳不动,轴转;外转子就是轴跟壳一起转(底座固定)。
内转子电机在尺寸和转速上有一定优势,外转子电机在扭力,散热等方面占据优势。
电动机型号的命名是有规则的,根据型号名称可以大致判断是否是自己需要的。
电机型号四位数字中的前2位代表直径,后2位代表长度。
各厂家的命名方式有所不同,常见多数品牌的电机型号,如2212,指的是电机内部的线圈组部件的直径22mm,长度12mm,而有些厂家则会把这一型号标注为2830电机,因为是电机外壳尺寸28mm,长度30mm,而其实这2个是差不多型号的电机。
电机还有一个重要参数:KV值。
KV值表示电机在“空载”情况下,电子调速器“每提升1v”输出电压时,电机转速的提高量。
例如在某电机KV值为1400,那么在10V电压下空载转速理论上为1400*10=14000,但实际值一般不会达到,尤其是在真机装螺旋桨的情况下。
与电机型号一样,KV值也是选择电机的重要标准之一。
不同飞机需要不同型号电机,以及电机合适的kv值,并与合理的螺旋桨搭配,才能在保护电子设备安全工作的前提下,有最合适的动力输出。
二、电调电调的全称是电子调速器,常用内置BEC的电调可连接电机和电池、舵机,调节电机的供电同时给接收机输电;也有专门给电机供电的,接收机、舵机等需外置UBEC供电。
电调的主要标识是电流,例如:30A,表示长期工作能承受的最大电流为30A,短时间(如10秒)能承受的电流可超过此值;此外还有所支持的电池,例如标识为“2s-4s”,则表明该电调支持锂电池2-4节串联的电池组。


舵机资料整理一、舵机简介及构造舵机(英文叫Servo):它由直流电机、减速齿轮组、位置检测器和控制电路组成的一套自动控制系统。
通过发送信号,指定输出轴旋转角度。
舵机一般而言都有最大旋转角度(比如180度),与普通直流电机的区别主要在:直流电机是一圈圈转动的,模拟舵机只能在一定角度内转动,不能整圈转(数字舵机可以在舵机模式和电机模式中切换,没有这个问题)。
普通直流电机无法反馈转动的角度信息,而舵机可以,用途也不同,普通直流电机一般是整圈转动做动力用,舵机是控制某物体转动一定角度用(比如机器人的关节)。
工作原理:控制电路板接受来自信号线的控制信号(PWM),控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘。
舵机的输出轴和位置反馈电位计是相连的,舵盘转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到控制电路板,进行反馈,然后控制电路板根据所在位置决定电机的转动方向和速度,实现目标运动到指定位置。
常见的舵机厂家有:日本的Futaba、JR、SANWA等,国产的有北京的新幻想、吉林的振华等。
现举Futaba S3003来介绍相关参数,以供大家设计时选用。
之所以用3003是因为这个型号是市场上最常见的,也是价格相对较便宜的一种(以下数据摘自Futaba产品手册)。
尺寸(Dimensions):40.4×19.8×36.0 mm重量(Weight):37.2 g工作速度(Operating speed):0.23 sec/60°(4.8V) ,0.19 sec/60°(6.0V)输出力矩(Output torque):3.2 kg.cm (4.8V) ,4.1 kg.cm (6.0V)舵机具有以下一些特点:>体积紧凑,便于安装;>输出力矩大,稳定性好;>控制简单,便于和数字系统接口;正是因为舵机有很多优点,所以,现在不仅仅应用在航模运动中,已经扩展到各种机电产品中来,在机器人控制中应用也越来越广泛。

【船海百科】图解几种常用的舵机“船海人”跑过船的人应该知道,船上大型机器设备的“四机一炉”,亦即主机、发电机、锚机、舵机和锅炉。
这些都是与船舶推进和操纵极其密切的关键设备。
之前我们推出过一期文章,讲解各种推进装置。
今天为与小刀昨天的舵设备相呼应,简单介绍以下几种常用的舵机,以飨读者。
本期文章部分图片资料,由甲板机械的领导品牌海特拉帕友情提供。
ps,海特拉帕已经于2013年被Cargotech旗下的麦基嘉收购,以增强其绞车方面的业务,同年麦基嘉还收购Aker Solutions的系泊和装载系统部门。
言归正传开始本期文章。
舵机按照机构分为电力,机械和液压三种方式;按照动力源的方式有人力、气动、电动、液压四种;船用舵机目前多用电液式,即液压设备由电动设备进行遥控操作,电液式又可分为两大类型,一种是往复式,往复式又包括摆杠式,柱塞式和拨叉式等几种。
1. 往复摆杠式舵机这种舵机形式比较简单,高度低,很便于船员操作和维护,操舵角度可达45°。
通常一个油泵驱动一个油缸操左右舵机,根据管路布置情况,左右舵机可以互换,也可以双泵驱动。
通常设有2台互为备用的液压泵站(或1台液压泵站与1台机带泵组互为备用),24V电动操纵、手轮操纵、手轮应急操舵等多种操舵型式。
具有多重自锁能力、舵角稳定功能。
在船上系统总成如下所示。
2. 往复柱塞式舵机柱塞式舵机,其原理是通过高低压油的转换而做功产生直线运动,并通过舵柄转换成旋转运动。
目前,船上常用的有二缸柱塞式液压舵机和四缸柱塞式液压舵机。
图为二缸柱塞式液压舵机示意图。
柱塞式液压舵机一般由转舵机构、动力源和操纵追随机构三大部分组成。
动力源由电动机、主油泵、辅油泵和控制阀箱等组成。
电动机带动主、辅油泵供给工作需要的各种压力油,安全控制阀是起保护作用和对压力油的分配。
转舵机构由油缸、柱塞和舵柄等。
当操舵装置控制系统启动电机带动变量泵时,变量泵从一对(或一个)油缸中抽油,同时向另一对(或一个)油缸输油,从而推动柱塞直线运动并使舵柄绕舵杆作旋转运动,产生舵角。
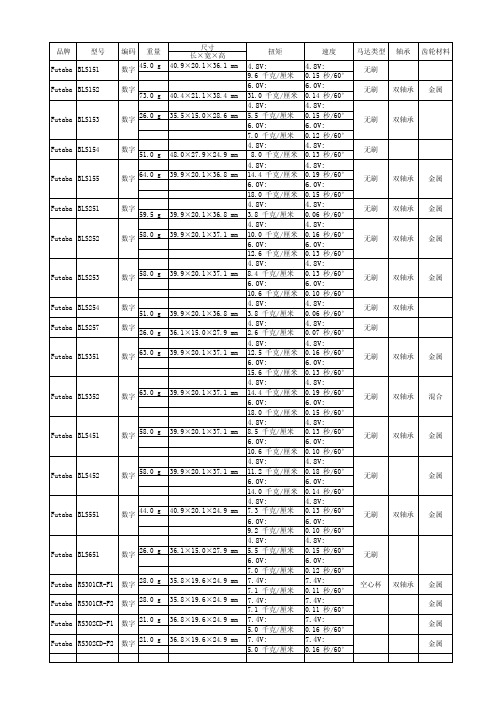
45.0 g40.9×20.1×36.1 mm4.8V:4.8V:9.6 千克/厘米0.15 秒/60°6.0V:6.0V:73.0 g 40.4×21.1×38.4 mm 31.0 千克/厘米0.14 秒/60°4.8V:4.8V:26.0 g35.5×15.0×28.6 mm5.5 千克/厘米0.15 秒/60°6.0V:6.0V:7.0 千克/厘米0.12 秒/60°4.8V:4.8V:51.0 g 48.0×27.9×24.9 mm 8.0 千克/厘米0.13 秒/60°4.8V:4.8V:64.0 g39.9×20.1×36.8 mm14.4 千克/厘米0.19 秒/60°6.0V:6.0V:18.0 千克/厘米0.15 秒/60°4.8V:4.8V:59.5 g 39.9×20.1×36.8 mm 3.8 千克/厘米0.06 秒/60°4.8V:4.8V:58.0 g39.9×20.1×37.1 mm10.0 千克/厘米0.16 秒/60°6.0V:6.0V:12.6 千克/厘米0.13 秒/60°4.8V:4.8V:58.0 g39.9×20.1×37.1 mm8.4 千克/厘米0.13 秒/60°6.0V:6.0V:10.6 千克/厘米0.10 秒/60°4.8V:4.8V:51.0 g 39.9×20.1×36.8 mm 3.8 千克/厘米0.06 秒/60°4.8V:4.8V:26.0 g 36.1×15.0×27.9 mm 2.6 千克/厘米0.07 秒/60°4.8V:4.8V:63.0 g39.9×20.1×37.1 mm12.5 千克/厘米0.16 秒/60°6.0V:6.0V:15.6 千克/厘米0.13 秒/60°4.8V:4.8V:63.0 g39.9×20.1×37.1 mm14.4 千克/厘米0.19 秒/60°6.0V:6.0V:18.0 千克/厘米0.15 秒/60°4.8V:4.8V:58.0 g39.9×20.1×37.1 mm8.5 千克/厘米0.13 秒/60°6.0V:6.0V:10.6 千克/厘米0.10 秒/60°4.8V:4.8V:58.0 g39.9×20.1×37.1 mm11.2 千克/厘米0.18 秒/60°6.0V:6.0V:14.0 千克/厘米0.14 秒/60°4.8V:4.8V:44.0 g40.9×20.1×24.9 mm7.3 千克/厘米0.13 秒/60°6.0V:6.0V:9.2 千克/厘米0.10 秒/60°4.8V:4.8V:26.0 g36.1×15.0×27.9 mm5.5 千克/厘米0.15 秒/60°6.0V:6.0V:7.0 千克/厘米0.12 秒/60°28.0 g 35.8×19.6×24.9 mm 7.4V:7.4V:7.1 千克/厘米0.11 秒/60°28.0 g 35.8×19.6×24.9 mm 7.4V:7.4V:7.1 千克/厘米0.11 秒/60°21.0 g 36.8×19.6×24.9 mm 7.4V:7.4V:5.0 千克/厘米0.16 秒/60°21.0 g36.8×19.6×24.9 mm7.4V:7.4V:5.0 千克/厘米0.16 秒/60°Futaba BLS151数字无刷双轴承金属Futaba BLS152数字无刷双轴承Futaba BLS153数字无刷Futaba BLS154数字无刷双轴承金属Futaba BLS155数字无刷双轴承金属Futaba BLS251数字无刷双轴承金属Futaba BLS252数字无刷双轴承金属Futaba BLS253数字无刷双轴承Futaba BLS254数字无刷Futaba BLS257数字无刷双轴承金属Futaba BLS351数字无刷双轴承混合Futaba BLS352数字无刷双轴承金属Futaba BLS451数字无刷金属Futaba BLS452数字无刷双轴承金属Futaba BLS551数字无刷Futaba BLS651数字无刷双轴承金属Futaba RS301CR-F1数字空心杯金属Futaba RS301CR-F2数字金属Futaba RS302CD-F1数字金属Futaba RS302CD-F2数字63.0 g39.9×20.1×37.6 mm 6.0V: 6.0V:14.1 千克/厘米0.13 秒/60°47.5 g39.9×20.1×39.1 mm 6.0V: 6.0V:8.9 千克/厘米0.20 秒/60°6.2 g22.9×10.2×20.3 mm 4.8V: 4.8V:1.6 千克/厘米0.10 秒/60°65.2 g39.6×22.4×42.9 mm 4.8V: 6.0V:9.3 千克/厘米0.62 秒/60°4.8V: 4.8V:42.0 g46.0×23.1×24.9 mm 4.3 千克/厘米0.60 秒/60°6.0V: 6.0V:5.5 千克/厘米0.50 秒/60°4.8V: 4.8V:44.4 g39.9×20.1×36.1 mm 2.4 千克/厘米0.28 秒/60°6.0V: 6.0V:3.0 千克/厘米0.22 秒/60°4.8V: 4.8V:45.0 g39.9×20.1×36.1 mm 2.4 千克/厘米0.28 秒/60°6.0V: 6.0V:3.0 千克/厘米0.22 秒/60°4.8V: 4.8V:35.0 g31.0×16.0×30.0 mm 2.7 千克/厘米0.25 秒/60°6.0V: 6.0V:3.3 千克/厘米0.20 秒/60°4.8V: 4.8V:37.0 g39.9×20.1×36.1 mm 3.2 千克/厘米0.23 秒/60°6.0V: 6.0V:4.1 千克/厘米0.19 秒/60°4.8V: 4.8V:37.0 g39.9×20.1×36.1 mm 3.2 千克/厘米0.23 秒/60°6.0V: 6.0V:4.1 千克/厘米0.19 秒/60°4.8V: 4.8V:41.0 g39.9×20.1×38.1 mm 5.2 千克/厘米0.20 秒/60°6.0V: 6.0V:6.5 千克/厘米0.16 秒/60°41.1 g39.9×20.1×38.1 mm 6.0V: 6.0V:6.5 千克/厘米0.16 秒/60°4.8V: 4.8V:49.0 g39.9×20.1×38.1 mm 5.2 千克/厘米0.20 秒/60°6.0V: 6.0V:6.5 千克/厘米0.16 秒/60°Futaba S30514.8V: 4.8V:17.0 g26.7×12.7×28.4 mm 2.5 千克/厘米0.18 秒/60°6.0V: 6.0V:3.1 千克/厘米0.14 秒/60°4.8V: 4.8V:21.0 g27.9×13.0×30.0 mm 3.7 千克/厘米0.25 秒/60°6.0V: 6.0V:4.6 千克/厘米0.20 秒/60°4.8V: 4.8V:9.6 g21.8×10.9×19.8 mm 1.3 千克/厘米0.11 秒/60°6.0V: 6.0V:1.5 千克/厘米0.09 秒/60°4.8V: 4.8V:95.0 g58.9×29.0×50.0 mm9.2 千克/厘米0.21 秒/60°双轴承金属Futaba RS403PR数字空心杯金属Futaba RS404PD数字3-poleFutaba S110M模拟单轴承塑料Futaba S125模拟双轴承塑料Futaba S136G模拟3-pole衬套塑料Futaba S148模拟3-pole单轴承塑料Futaba S3001模拟3-pole双轴承金属Futaba S3002模拟3-pole塑料Futaba S3003模拟双轴承塑料Futaba S3004模拟3-pole单轴承塑料Futaba S3010模拟3-poleFutaba S3014金属Futaba S3050数字Futaba S31015-pole衬套混合Futaba S3102模拟3-pole金属Futaba S31033-pole衬套塑料Futaba S3104模拟3-pole9.6 g21.6×10.9×19.8 mm 1.3 千克/厘米0.11 秒/60°6.0V: 6.0V:1.5 千克/厘米0.09 秒/60°9.0 g22.1×10.9×20.1 mm 4.8V: 4.8V:1.2 千克/厘米0.12 秒/60°7.7 g20.6×11.4×22.1 mm 4.8V: 4.8V:1.2 千克/厘米0.12 秒/60°7.3 g22.9×10.2×20.3 mm 4.8V: 4.8V:1.2 千克/厘米0.12 秒/60°4.8V:0.14 秒/60°6.5 g22.9×10.2×20.3 mm 4.8V: 4.8V:0.5 千克/厘米0.14 秒/60°7.3 g21.8×10.9×19.8 mm 4.8V: 4.8V:1.6 千克/厘米0.10 秒/60°6.3 g22.1×10.9×20.1 mm 4.8V: 4.8V:0.6 千克/厘米0.12 秒/60°4.8V: 4.8V:6.3 g22.1×10.9×20.1 mm0.6 千克/厘米0.12 秒/60°4.8V: 4.8V:9.6 g21.8×10.9×20.3 mm 1.2 千克/厘米0.11 秒/60°6.0V: 6.0V:1.5 千克/厘米0.10 秒/60°4.8V: 4.8V:7.8 g22.1×10.9×20.1 mm 1.5 千克/厘米0.10 秒/60°6.0V: 6.0V:1.7 千克/厘米0.09 秒/60°4.8V: 4.8V:7.8 g22.1×10.9×20.1 mm 1.5 千克/厘米0.10 秒/60°6.0V: 6.0V:1.7 千克/厘米0.09 秒/60°17.0 g27.9×13.0×30.0 mm 4.8V: 4.8V:2.8 千克/厘米0.15 秒/60°4.8V: 4.8V:8.5 g22.1×10.9×23.1 mm 1.5 千克/厘米0.10 秒/60°6.0V: 6.0V:1.7 千克/厘米0.09 秒/60°23.0 g30.0×10.9×29.0 mm 4.8V: 4.8V:3.7 千克/厘米0.24 秒/60°4.8V: 4.8V:42.0 g40.9×20.1×36.1 mm 3.1 千克/厘米0.21 秒/60°6.0V: 6.0V:3.9 千克/厘米0.17 秒/60°4.8V: 4.8V:41.0 g39.9×20.1×38.1 mm 5.0 千克/厘米0.22 秒/60°6.0V: 6.0V:6.3 千克/厘米0.18 秒/60°4.8V: 4.8V:9.6 g22.1×10.9×20.1 mm 1.4 千克/厘米0.11 秒/60°6.0V: 6.0V:1.7 千克/厘米0.09 秒/60°4.8V: 4.8V:9.6 g22.1×10.9×20.1 mm 1.4 千克/厘米0.13 秒/60°6.0V: 6.0V:1.7 千克/厘米0.11 秒/60°4.8V: 4.8V:7.9 g22.1×10.9×20.1 mm 1.5 千克/厘米0.10 秒/60°6.0V: 6.0V:1.7 千克/厘米0.09 秒/60°塑料Futaba S31063-pole塑料Futaba S3107模拟3-poleFutaba S3108Futaba S3108M3-poleFutaba S3109Futaba S3109MFutaba S3110模拟塑料Futaba S3111模拟塑料Futaba S3111M模拟塑料Futaba S3113模拟衬套塑料Futaba S3114模拟3-pole衬套塑料Futaba S3114M模拟3-pole塑料Futaba S3115模拟塑料Futaba S3117模拟双轴承金属Futaba S3150数字空心杯单轴承塑料Futaba S3151数字3-pole单轴承塑料Futaba S3152数字空心杯塑料Futaba S3153数字金属Futaba S3153MG数字塑料Futaba S3154数字20.0 g30.0×10.9×29.0 mm 2.0 千克/厘米0.16 秒/60°6.0V:0.13 秒/60°4.8V: 4.8V:9.3 g22.1×10.9×22.1 mm 2.0 千克/厘米0.13 秒/60°6.0V: 6.0V:2.4 千克/厘米0.11 秒/60°4.8V: 4.8V:8.3 g22.1×10.9×23.1 mm 1.5 千克/厘米0.10 秒/60°6.0V: 6.0V:1.7 千克/厘米0.09 秒/60°4.8V: 4.8V:7.8 g22.1×10.9×23.1 mm 1.5 千克/厘米0.10 秒/60°6.0V: 6.0V:1.7 千克/厘米0.09 秒/60°4.8V: 4.8V:26.0 g35.1×16.0×25.9 mm 6.8 千克/厘米0.57 秒/60°6.0V: 6.0V:8.5 千克/厘米0.47 秒/60°4.8V: 4.8V:103.0 g58.9×29.0×50.0 mm 6.4 千克/厘米0.24 秒/60°6.0V: 6.0V:8.0 千克/厘米0.19 秒/60°4.8V: 4.8V:19.9 g30.0×9.9×29.0 mm 2.2 千克/厘米0.15 秒/60°4.8V: 4.8V:47.0 g39.9×20.1×38.1 mm7.1 千克/厘米0.25 秒/60°6.0V: 6.0V:8.9 千克/厘米0.20 秒/60°4.8V: 4.8V:126.0 g66.0×30.0×56.9 mm19.2 千克/厘米0.20 秒/60°6.0V: 6.0V:24.0 千克/厘米0.16 秒/60°4.8V: 4.8V:47.1 g40.6×20.1×37.3 mm 2.6 千克/厘米0.19 秒/60°6.0V: 6.0V:3.2 千克/厘米0.15 秒/60°4.8V: 4.8V:107.0 g58.9×29.0×50.0 mm11.2 千克/厘米0.30 秒/60°6.0V: 6.0V:14.0 千克/厘米0.26 秒/60°4.8V: 4.8V:72.0 g43.9×23.1×42.9 mm8.8 千克/厘米0.70 秒/60°6.0V: 6.0V:11.0 千克/厘米0.56 秒/60°4.8V: 4.8V:127.0 g58.9×29.0×50.0 mm15.2 千克/厘米0.25 秒/60°6.0V: 6.0V:19.0 千克/厘米0.20 秒/60°4.8V: 4.8V:125.0 g58.9×29.0×50.0 mm16.8 千克/厘米0.29 秒/60°6.0V: 6.0V:21.0 千克/厘米0.23 秒/60°4.8V: 4.8V:125.0 g58.9×29.0×50.0 mm13.6 千克/厘米0.19 秒/60°6.0V: 6.0V:17.0 千克/厘米0.15 秒/60°金属Futaba S3155数字金属Futaba S3156MG数字Futaba S3157数字Futaba S3157M数字双轴承金属Futaba S3170G数字双轴承混合Futaba S3302模拟3-poleFutaba S3303数字双轴承金属Futaba S3305模拟3-pole双轴承塑料Futaba S3306模拟3-pole金属Futaba S34015-pole双轴承混合Futaba S3801模拟3-pole双轴承混合Futaba S3802模拟3-pole双轴承金属Futaba S5050数字5-pole双轴承金属Futaba S5301模拟5-pole双轴承金属Futaba S5302模拟5-pole83.0 g46.0×24.9×43.9 mm7.8 千克/厘米0.10 秒/60°7.2V:7.2V:9.8 千克/厘米0.08 秒/60°4.8V: 4.8V:48.0 g39.9×20.1×36.1 mm 3.9 千克/厘米0.22 秒/60°6.0V: 6.0V:5.2 千克/厘米0.18 秒/60°4.8V: 4.8V:31.0 g31.0×16.0×31.0 mm 2.5 千克/厘米0.18 秒/60°6.0V: 6.0V:3.1 千克/厘米0.14 秒/60°4.8V: 4.8V:32.0 g35.8×19.6×24.9 mm 4.5 千克/厘米0.18 秒/60°6.0V: 6.0V:5.5 千克/厘米0.15 秒/60°7.2V:7.2V:6.8 千克/厘米0.12 秒/60°4.8V: 4.8V:42.5 g38.6×20.3×34.5 mm 2.5 千克/厘米0.20 秒/60°6.0V: 6.0V:3.1 千克/厘米0.16 秒/60°4.8V: 4.8V:48.0 g39.9×20.1×36.1 mm 2.9 千克/厘米0.16 秒/60°6.0V: 6.0V:3.6 千克/厘米0.13 秒/60°53.0 g48.0×26.9×24.9 mm 4.8V: 4.8V:5.8 千克/厘米0.18 秒/60°50.0 g39.9×20.1×37.1 mm 4.8V: 4.8V:9.5 千克/厘米0.19 秒/60°4.8V: 4.8V:85.0 g49.0×24.9×39.9 mm16.0 千克/厘米0.23 秒/60°6.0V: 6.0V:20.0 千克/厘米0.19 秒/60°4.8V: 4.8V:85.0 g49.0×24.9×39.9 mm12.0 千克/厘米0.19 秒/60°6.0V: 6.0V:15.0 千克/厘米0.15 秒/60°53.0 g48.0×26.9×24.9 mm 4.8V: 4.8V:4.6 千克/厘米0.14 秒/60°4.8V: 4.8V:61.0 g39.9×20.1×37.1 mm11.0 千克/厘米0.16 秒/60°6.0V: 6.0V:13.8 千克/厘米0.13 秒/60°4.8V: 4.8V:63.0 g39.9×20.1×37.1 mm19.6 千克/厘米0.21 秒/60°6.0V: 6.0V:24.5 千克/厘米0.17 秒/60°71.0 g40.9×21.1×37.1 mm 6.0V: 6.0V:30.6 千克/厘米0.14 秒/60°48.2 g40.4×20.1×35.6 mm 6.0V: 6.0V:5.0 千克/厘米0.22 秒/60°4.8V: 4.8V:53.0 g40.9×20.1×38.1 mm 4.0 千克/厘米0.27 秒/60°6.0V: 6.0V:5.0 千克/厘米0.22 秒/60°53.9 g40.4×20.1×37.6 mm 4.8V: 4.8V:5.5 千克/厘米0.11 秒/60°53.9 g40.4×20.1×37.6 mm 4.8V: 4.8V:9.5 千克/厘米0.19 秒/60°双轴承金属Futaba S5801模拟5-pole单轴承塑料Futaba S9001模拟空心杯双轴承混合Futaba S9002模拟空心杯双轴承金属Futaba S9070数字无刷Futaba S9101空心杯双轴承塑料Futaba S9102模拟空心杯双轴承塑料Futaba S9150数字空心杯双轴承塑料Futaba S9151数字空心杯双轴承金属Futaba S9152数字空心杯双轴承金属Futaba S9153数字空心杯塑料Futaba S9154数字空心杯金属Futaba S9155数字空心杯双轴承金属Futaba S9156数字空心杯双轴承金属Futaba S9157数字空心杯Futaba S9201模拟双轴承塑料Futaba S9202模拟空心杯双轴承Futaba S9203模拟空心杯双轴承金属Futaba S9204模拟空心杯53.9 g40.4×20.1×37.6 mm 4.8V: 4.8V:5.5 千克/厘米0.11 秒/60°53.0 g40.9×20.1×38.1 mm 4.8V: 4.8V:9.5 千克/厘米0.19 秒/60°54.0 g40.9×20.1×38.1 mm 4.8V: 4.8V:5.5 千克/厘米0.11 秒/60°57.0 g39.9×20.1×37.1 mm 4.8V: 4.8V:3.7 千克/厘米0.07 秒/60°50.0 g39.9×20.1×37.1 mm4.8V: 4.8V:6.6 千克/厘米0.14 秒/60°49.3 g38.1×19.1×35.6 mm 4.8V: 4.8V:2.0 千克/厘米0.08 秒/60°49.0 g39.9×20.1×37.1 mm 4.8V: 4.8V:3.4 千克/厘米0.06 秒/60°55.0 g39.9×20.1×37.1 mm4.8V: 4.8V:9.0 千克/厘米0.16 秒/60°4.8V: 4.8V:57.0 g39.9×20.1×37.1 mm 3.4 千克/厘米0.06 秒/60°26.0 g36.1×15.0×29.0 mm 4.8V: 4.8V:2.0 千克/厘米0.08 秒/60°65.2 g40.4×20.1×39.4 mm 4.8V: 4.8V:7.1 千克/厘米0.19 秒/60°51.0 g40.4×20.1×35.6 mm 4.8V: 4.8V:4.1 千克/厘米0.28 秒/60°6.0V: 6.0V:5.0 千克/厘米0.22 秒/60°61.0 g39.9×20.1×37.1 mm 4.8V: 4.8V:8.0 千克/厘米0.15 秒/60°6.0V: 6.0V:10.0 千克/厘米0.12 秒/60°4.8V: 4.8V:61.0 g39.9×20.1×37.1 mm11.0 千克/厘米0.16 秒/60°6.0V: 6.0V:13.8 千克/厘米0.13 秒/60°4.8V: 4.8V:55.0 g40.9×20.1×38.1 mm 6.4 千克/厘米0.12 秒/60°6.0V: 6.0V:8.0 千克/厘米0.10 秒/60°48.2 g40.4×20.1×35.6 mm 4.8V: 4.8V:3.2 千克/厘米0.16 秒/60°55.0 g39.1×20.1×37.3 mm4.8V: 4.8V:5.7 千克/厘米0.11 秒/60°4.8V: 4.8V:55.0 g40.9×20.1×38.1 mm 5.8 千克/厘米0.13 秒/60°6.0V: 6.0V:7.2 千克/厘米0.11 秒/60°4.8V: 4.8V:55.0 g40.4×20.1×37.6 mm 6.4 千克/厘米0.10 秒/60°6.0V: 6.0V:8.0 千克/厘米0.08 秒/60°4.8V: 4.8V:56.0 g40.0×20.0×36.0 mm7.0 千克/厘米0.13 秒/60°6.0V: 6.0V:8.0 千克/厘米0.10 秒/60°4.8V: 4.8V:50.0 g39.9×20.1×34.0 mm7.3 千克/厘米0.13 秒/60°6.0V: 6.0V:9.2 千克/厘米0.11 秒/60°金属Futaba S9205双轴承金属Futaba S9206模拟空心杯双轴承金属Futaba S9250数字空心杯双轴承金属Futaba S9251数字空心杯双轴承塑料Futaba S9252数字空心杯双轴承塑料Futaba S9253数字空心杯双轴承塑料Futaba S9254数字空心杯单轴承金属Futaba S9255数字空心杯塑料Futaba S9256数字双轴承塑料Futaba S9257数字空心杯金属Futaba S9303模拟空心杯Futaba S9304空心杯双轴承金属Futaba S9350数字空心杯金属Futaba S9351数字空心杯双轴承金属Futaba S9402模拟空心杯Futaba S9403空心杯金属Futaba S9404空心杯双轴承金属Futaba S9405模拟空心杯金属Futaba S9450空心杯双轴承金属Futaba S9451数字空心杯双轴承金属Futaba S9452数字空心杯4.8V: 4.8V:43.9 g40.4×20.8×25.4 mm 4.8 千克/厘米0.11 秒/60°6.0V: 6.0V:6.0 千克/厘米0.09 秒/60°4.8V: 4.8V:45.0 g40.9×20.1×24.9 mm7.1 千克/厘米0.14 秒/60°6.0V: 6.0V:8.8 千克/厘米0.11 秒/60°4.8V: 4.8V:31.0 g36.1×15.0×31.0 mm 2.2 千克/厘米0.11 秒/60°6.0V: 6.0V:2.7 千克/厘米0.09 秒/60°4.8V: 4.8V:26.0 g36.1×15.0×29.0 mm 3.6 千克/厘米0.14 秒/60°6.0V: 6.0V:4.5 千克/厘米0.11 秒/60°金属Futaba S9550空心杯双轴承金属Futaba S9551数字空心杯双轴承金属Futaba S9602模拟空心杯双轴承塑料Futaba S9650数字空心杯。
进口液压件品牌一、引言液压件是一种广泛应用于机械设备中的重要组成部分,它们通过液体的力学性质来传递能量,实现机械设备的运动和控制。
在液压件市场中,进口液压件品牌因其高质量、可靠性和先进技术而备受关注。
本文将介绍几个知名的进口液压件品牌,包括其产品特点、技术优势和市场地位。
二、德国巴奇液压(Bosch Rexroth)德国巴奇液压是一家全球领先的液压件制造商,其产品广泛应用于工程机械、冶金设备、航空航天等领域。
该品牌的液压件以其卓越的性能和可靠性而闻名,其主要产品包括液压泵、液压马达、液压阀等。
巴奇液压的技术优势在于其先进的液压控制技术和智能化系统,能够实现高效能量转换和精确的运动控制。
在全球范围内,巴奇液压产品得到了广泛的应用和认可,市场地位十分稳固。
三、美国派克汉尼汾(Parker Hannifin)美国派克汉尼汾是一家全球知名的液压件制造商,其产品涵盖了液压泵、液压马达、液压阀、液压缸等多个系列。
该品牌以其卓越的品质和技术创新而备受推崇。
派克汉尼汾的液压件具有高效能、低噪音、可靠性高等特点,适用于各种工业应用。
该品牌还致力于研发智能化的液压系统,以满足不断变化的市场需求。
派克汉尼汾在全球范围内拥有广泛的销售网络和服务体系,市场份额领先。
四、日本日立液压(Hitachi Hydraulic)日本日立液压是一家拥有悠久历史的液压件制造商,其产品包括液压泵、液压阀、液压缸等。
该品牌以其高品质和可靠性而闻名,其液压件广泛应用于工程机械、冶金设备等领域。
日立液压的产品具有高效能、耐用性强等特点,能够满足各种复杂工况下的需求。
该品牌还注重研发环保型的液压件,以推动可持续发展。
日立液压在全球范围内设有多个销售和服务机构,市场份额稳步增长。
五、瑞典力士乐(SKF)瑞典力士乐是一家全球领先的工程机械和液压件制造商,其产品包括液压泵、液压阀、液压缸等。
该品牌以其卓越的质量和创新技术而闻名,其液压件广泛应用于航空航天、能源等领域。
一、用途与特点RYD—※※—WB型船用人力液压舵机,适用于转舵扭矩不大于5千牛米的小型渔船、货船、舵船、以及机动驳船、交通艇、巡逻艇、救生艇、消防艇、工作艇、旅游艇、轮渡和其它小型船舶。
还可用作船舶应急操舵装置。
RYD—※※—WB型船用人力液压舵机,具有结构紧凑、无噪音、体积小、利于舱室布置等特点。
其操作灵活、工作平稳、安全可靠、具有自锁能力,可使舵角保持稳定,并且减少操作者的劳动强度。
该机之阀件为集成块、管理简单,安装、维修方便。
RYD—※※—WB人力液压舵机符合CCS规定,是小型船舶理想的操舵装置。
二、工作原理当舵角为零时,舵叶停止在图示位置。
当向右转动舵轮8时,从人力液压泵7 左腔排出的液压油,一方面冲开组合阀6左边的单向阀,使油液进入左液压缸4的B腔和右液压缸的C腔,推动舵叶向右偏转,使船向右转弯。
此时,发讯器2将讯号传输给舵角指示器9,舵角指示器9 即显示出相应的舵角。
另一方面,压力油同时作用在液控单向阀6内的控制活塞上,使其向右移动,从而打开右边的单向阀,使左液压缸4的A腔和右液压缸D腔中的油液经液控单向阀6中的右阀孔流回人力液压泵的右腔(此时为泵的吸油腔)当舵轮停止转动后,组合阀6中的左右单向阀由于弹簧作用而复位,将油路锁闭,舵叶即停止在某一所需的角度上,舵角指示器9随着显示出舵角值。
当舵轮向左转时,情况与上述正好相反,舵叶向左偏转,船随之向左转弯。
系统工作时,若由于某种原因使系统压力超过安全阀的调定压力值,安全阀开启溢流,使舵及舵机系统免于损坏。
三、安装与使用(一)安装1、安装前去掉油口堵盖,检查各油管是否畅通。
2、将舵柄与舵杆固定起来。
3、将油缸与舵柄用销轴连接起来,并安装上油杯。
注意:必须使液压缸的放气阀向上。
4、使舵柄处于与液压缸活塞杆的垂直方向,按图示尺寸,将液压缸用液压缸支座固定起来,用地脚螺栓固定在船底板上。
5、用JB1885-77(A)型胶管接头将油缸的油口与组合阀的油口连接起来。
世界主要船舶配套业国家、地区发展现状分析世界主要船舶配套业国家、地区发展现状分析船用设备是影响船舶成本、性能、效益、质量的重要因素,也是现代化船舶的重要组成部分,其价格约占船价的60%至70%。
各国在大力发展造船业同时,也在逐步加强船舶配套业的发展。
欧洲船舶配套业独揽半壁江山欧洲是现代航运业和造船业的发祥地,经过几百年发展,形成了强大的造船工业及船舶配套工业体系。
目前,欧洲船舶配套工业供应商达到1万多家,直接从业26万人,间接从业44万人,年营业额中出口占40%左右(±5%),其中对中国出口占全部出口金额的15%。
在世界船舶设备销售230亿美元中,日本和韩国占到1/2, 其他1/2为欧美地区厂商占据。
近年来,虽然世界造船中心向东方转移,但欧洲仍具有强大的船舶配套工业势力,在技术和质量方面仍处于领跑地位。
欧洲船舶配套业主要特点主要特点说明历史悠久、品牌享誉全球欧洲船舶配套产品在世界各地的船东和船厂中享有广泛而良好的信誉。
如MAN-B&W 、瑞士Sulzer船用低速柴油机、法国PC、芬兰瓦锡兰、德国MWM、MAK中高速柴油机、英国Decca雷达、德国安修斯罗经、丹麦的收发报机、欧堡锅炉以及其他甲板机械、舱室机械等。
重视科研具有较强的科研力量,始终保持产品的先进性、可靠性及稳定性。
良好的服务网络西欧各主要厂家在世界各主要造船国家、航运、港口发达地区设有分支机构或办事处,具有大批高素质的分销商和代理商,非常注重售后服务发挥联合优势组建跨国集团,协力对外竞争。
如克瓦尔纳、多格雷戈、赫格隆、利伯海尔等著名厂商均为跨国集团。
产品性能不断改进对产品性能不断改进、标新立异,自动化程度高,操作性更加灵活、方便,安全性能好。
资料来源:上海科学技术情报研究所分析整理日本国产化率世界第一,造船和造机联营日本船舶配套业主要通过引进欧美国家先进技术,消化、吸收及创新;同时实施保护性措施,如对二次开发获得的技术限制对外转让、国内可以生产的设备限制进口等措施。
甲板机械介绍常规的甲板机械设备主要包括:舵机,锚绞机,液压舱口盖,艏侧推,crane 吊。
1)舵机舵机的大小由外舾装按照船级社的规范决定,选型时主要考虑扭矩(kN/m),在设计工作中有两个考核要点:1.主机在MCR(最大持续稳定工况)状态下,舵角由一舷的35o转到另一舷的30o需要在28sec之内完成。
2.舵杆的计算,即其直径的确定。
舵机(约125kg)目前多用电液式,即液压设备由电动设备进行遥控操作。
产品形式分2类:1.往复柱塞式舵机(74000DWT散货轮用),原理是通过高低压油的转换而作工产生直线运动,并通过舵柄转换成旋转运动。
2.转叶式舵机(化学品船用),原理是高低压油直接作用于转子,体积小而高效,但成本较高。
生产厂商:往复柱塞式舵机(国内可生产)国外主要由日本川崎,德国的HATLAPA提供;国内由武汉船用机械厂按照日本川崎的专利生产,南京工程机器厂按照德国的HATLAPA设计及供货进行组装生产。
转叶式舵机(全进口)主要由Rolls-Royce生产小型的,Frydenbo生产大型的。
两类舵机的差别:往复柱塞式舵机以上舵承来承重舵系,下舵承来定位,舵柄的压入量仅几毫米;而转叶式舵机不需要上舵承,由舵机直接承重,但是在舵机平台需要考虑水密性,舵柄的压入量需几十毫米。
往复柱塞式舵机对尺寸的要求较大。
往复柱塞式舵机可以向一舷偏转不到40o,转叶式舵机可达70 o。
液压系统作用是高、低压转换,将压力损失转化为机械运动。
包括1.高压泵组(提供压力油)2.控制、操作设备3.执行机构(油马达,油缸柱塞等)。
2)锚绞机其选型的参数有1.锚链的直径(54,60,78mm等),以确定锚机。
注意一个重要的指标是起锚速度不能小于9m/min。
2.绞车拉缆的负荷与船舶的大小相关,其收放绳的速度一般无明确要求。
锚机的分类包括1.电动式,用电机与减速齿轮箱来带动绞车。
2.电液式,分为中低压(压力50-70kg散货轮用),中压(压力大于70kg),高压(压力大于150kg)。
futaba舵机参数表
来源:网络作者:模型淘宝发布时间:2007-05-02
JR舵机参数表
来源:网络作者:模型淘宝发布时间:2007-05-02
舵机抖动原因初探
来源:网络作者:模型淘宝发布时间:2007-05-02
我的方向舵伺服機S5301異常抖動,它抖動的時候我把它押一下就不會抖动.在把它碰一下又抖了.
解题者---江俊德
如果是不連接連桿的情況下,有兩個可能:
1.廉價的伺服機有齒輪誤差的問題,容易造成間隙,所以伺服器不斷修正
2.可變電阻不良
如果是連接連桿的情況下,也有幾個可能:
1.可變電阻老化磨損
2.伺服機速度過快,造成過度反覆修正
3.採用鋼絲連接,彈性過好
4.延長線連接過過長,造成干擾
5.壞了
解题者----大铭.
伺服機抖動有下述情形
1.在高速飛行時候抖動-1.請檢查是否舵机拉杆沒有拉緊.
2.請檢查
舵机摇臂的拉桿是否孔位太大出現間隙.
2.如使用数字舵机請勿使用Y 连接线..
3.是否電壓不足.
4.舵机是否崩齒.
5.Rx或Tx信號傳輸有問題.[发射机的天线未拉出或接收机的天线断裂.]
解题者--郭駿杰
伺服搖臂拆下利用寶特瓶做一至二片華司片套上伺服機軸再裝回伺服搖臂應可改善(需是數位式伺服器) 转帖---台灣飛行魔術隊網站。