最新卫星影像图2米卫星影像图-北京揽宇方圆
- 格式:pdf
- 大小:4.65 MB
- 文档页数:16
北京揽宇方圆信息技术有限公司2米分辨率卫星影像图-高分一号、资源三号、高分六号卫星影像选择北京揽宇方圆信息技术有限公司是国内的领先遥感卫星数据机构,而且是整合全球的遥感卫星数据资源,分发不同性能、技术应用上可以互补的多种卫星影像,包括光学、雷达卫星影像、历史遥感影像等各种卫星数据服务,各种专业应用目的的图像处理、解译、顾问服务以及基于卫星影像的各种解决方案等。
遥感卫星影像数据贯穿中国1960年至今的所有卫星影像数据,是中国领先的专业遥感卫星数据服务机构,提供多尺度、多分辨率、全覆盖的遥感卫星影像数据服务,最大限度的保证了遥感影像数据获取的及时性和完整性。
1:购买遥感数据请从大型遥感卫星数据公司官方渠道购买(北京揽宇方圆国内老牌卫星数据公司,经营时间久,行业口碑相传,1800个行业用户选择的实力见证)。
2:北京揽宇方圆遥感数据购买专人数据查询一对一服务,数据查询网址是卫星公司网址,全球公众都可以查询,有45颗遥感卫星数据资源,卫星数据资源多。
3:如果某些公司的报价与本公司价格相差很大,您可以随时致电北京揽宇方圆了解是否是正常卫星影像价格,北京揽宇方圆提供全部卫星样例数据下载。
4:北京揽宇方圆拥有大型正版遥感处理软件,遥感数据处理工程师有10年以上遥感处理工作经验,并有国家大型项目工作经验,12项自主卫星数据处理软件著作权,最大限度保持遥感卫星影像处理的真实度。
5:北京揽宇方圆是国家认定的高新技术企业,遥感卫星数据行业领军企业。
6:北京揽宇方圆通过ISO900认证的国际质量管理操作体系,无论是遥感卫星品质和遥感数据处理质量,都能得到保障。
一、卫星类型(1)光学卫星:worldview1、worldview2、worldview3、worldview4、quickbird、geoeye、ikonos、pleiades、deimos、spot1、kompsat系例、spot2、spot3、spot4、spot5、spot6、spot7、landsat5(tm)、landsat(etm)、rapideye、alos、kompsat系例卫星、planet卫星、北京二号、高景一号、资源三号、高分一号、高分二号。
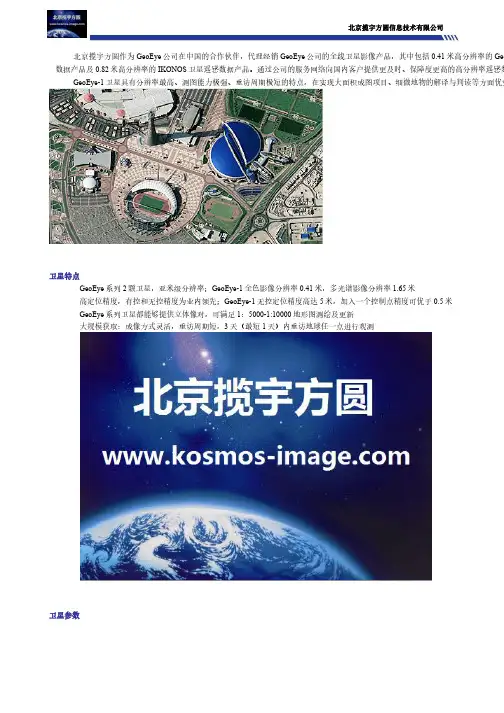
高景一号卫星由2颗0.5米分辫率的光学卫星组成,具有专业级的图像质量、高敏捷的机动性能、丰富的成像模式和高集成的电子系统等技术特点。
在轨应用后,将打破我国0.5米级商业遥感数据被国外垄断的现状,也标志着国产商业遥感数据水平正式迈入国际一流行列。
核心优势
超高分辨率
全色分辨率高达0.5 米,多光谱分辨率为 2 米,能够彰显细腻的地物细节,适用于高精度地图制作、变化监测和影像深度分析。
优化的光谱波段设置
-- 具有全色波段和四个标准多光谱波段:蓝色、绿色、红色和近红外波段。
-- 大幅宽拍摄,单景最大可拍摄60km x 70km影像。
-- 星下点幅宽高达12 公里,大幅提升观测能力,形成大面积地表观测和环境监测具有独特优势。
突出的敏捷性
-- 迅速精准实现星下点成像,常规侧摆角最大为30°,执行重点任务时可达到45°。
-- 具有星下点成像、侧摆成像、连续条带、多条带拼接、立体成像、多目标成像等多种工作模式。
优异的采集能力
2T 星上储存空间,形成强大的采集能力,单颗卫星每天可采集70 万平方公里。
在全球任何地方,可实现每天观测一次。
Sentinel-2卫星是全球环境与安全监视系统(GMES)中的多光谱遥感成像卫星情况:Sentinel-2卫星使用EADS Astrium公司的AstroBus-L卫星平台,一套标准的模块ESCC(欧洲合作空间标准)可使卫星在轨工作寿命长达10年,卫星平台的设计可容忍一项故障,标准设备的选用基于最小化的2级EEE标准。
在绝大多数情况下可与1级标准媲美。
AstroBus-L平台的设计针对LEO轨道(低地球轨道),基于选择标准设计选项,AstroBus-L平台可以运行于各种LEO轨道,包括不同的轨道高度和轨道倾角,AstroBus-L平台的一个基本特征是基于故障检测隔离恢复的强鲁棒性设计。
分层的机构设计可以适应不同的任务需求。
Sentinel-2卫星在轨想象图卫星的姿态控制通过高数据更新率多头星敏实现对3轴的控制,星敏安装在相机结构上,以便实现更好的姿态精度和稳定性。
AOCS系统(姿态和轨道控制分系统)包含以下的部件:一台双频GPS接收机(L1/L2双频编码)用于提供位置和时间信息 一台星敏感器用于精确定姿(3头星敏)角速度管理单元用于角速度阻尼控制和偏航姿态获取一套备份的精密IMU(惯性测量单元)用于高精度姿态确定磁强计用于获取地球磁场信息CESS(粗地球太阳敏感器)用于粗获地球和太阳矢量4台动量轮和3根磁力矩器用于姿态控制RCS(反应控制系统)采用单组元推进剂和1N推力器用于轨道维持AOCS(姿态与轨道控制分系统)的不同任务被定义为以下的模式:姿态初始化和安全模式(角速度阻尼,地球矢量获取,偏航角建立,姿态稳定)正常模式(常规和特殊观测姿态建立)轨道控制模式(轨道平面内/外的轨道机动)由于Sentinel-2卫星在设计上决定将IMU(惯性测量单元)和星敏感器安装在具有良好温控条件下的载荷平台上,因此IMU和星敏的相对姿态指向的时变影响会被减到最小。
此外,星敏的时间关联测量噪声协方差必须纳入考虑之中。
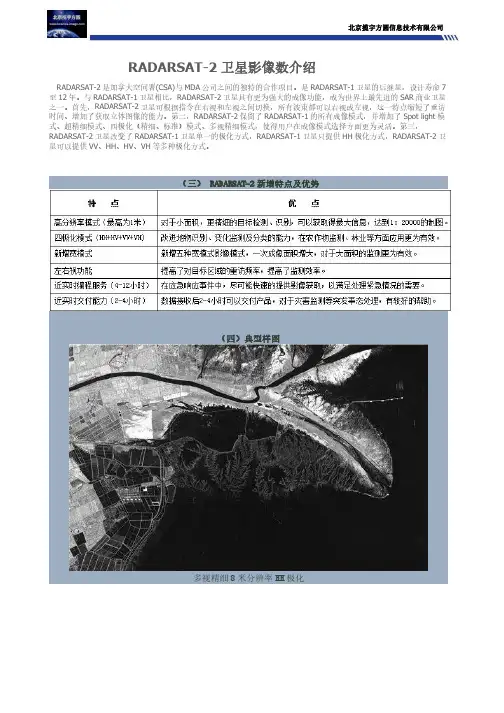
北京揽宇方圆信息技术有限公司加拿大雷达卫星系列目前包括2颗卫星:RADARSAT-1、RADARSAT-2。
RADARSAT 系列卫星由加拿大空间署(CSA)研制与管理,用于向商业和科研用户提供卫星雷达遥感数据。
RADARSAT-1卫星1995年11月发射升空,载有功能强大的合成孔径雷达(SAR),可以全天时,全天候成像,为加拿大及世界其他国家提供了大量数据。
RADARSAT-1的后继星是RADARSAT-2卫星,它是加拿大第二代商业雷达卫星。
RADARSAT-2卫星于2007年12月14日发射。
与RADARSAT-1相比,RADARSAT-2卫星具有更为强大的功能。
RADARSAT 系列卫星的应用广泛,包括减灾防灾、雷达干涉、农业、制图、水资源、林业、海洋、海冰和海岸线监测。
卫星传感器全色可见光近红外短波红外热红外雷达最小最大最高最低垂直轨道方向RADARSAT-1SAR -----C 13810020~500RADARSAT-2SAR -----C13110020~500RADARSAT-1卫星RADARSAT-1卫星与其他卫星有所不同,它在地方时早晚6:00左右成像。
它装载的SAR传感器使用C波段进行对地观测,具有7种成像模式(精细模式、标准模式、宽模式、宽幅扫描、窄幅扫描、超高入射角、超低入射角),25种不同的波束,这些不同的波束模式具有不同入射角,因而具有多种分辨率、不同幅宽。
中国科学院遥感与数字地球研究所自2001年6月开始接收RADARSAT-1卫星数据,并保存着RADARSAT-1卫星自2001年至今接收的卫星原始数据,能够处理多种产品级别,产品格式主要有CEOS、GeoTIFF两种。
RADARSAT-1卫星RADARSAT-1卫星数据由遥感地球所数据服务部负责分发。
同时,我中心提供RADARSAT-1卫星成像编程服务,用户可以向遥感地球所数据服务部提交编程申请。
RADARSAT-1的卫星参数、有效载荷参数、工作模式和产品级别说明如下:所属国家加拿大设计寿命(年)5发射时间1995-11-04失效时间2013-05-09卫星重量(千克)2713轨道类型近极地太阳同步轨道轨道高度(千米)793轨道倾角(°)98.6运行周期(分钟)100.7每天绕地球圈数14.4降交点地方时6:00轨道重复周期(天)24传感器数量1下行速率(Mbps)105工作波段C工作频率(GHz) 5.3极化方式HH空间分辨率(米)8~100入射角(°)10~59带宽(MHz)30幅宽(千米)50~500精细模式F1~F537~48850x50标准模式S1~S720~4930100x100宽模式W1~W320~4530150x150窄幅扫描SN120~4050300x300窄幅扫描SN231~4650300x300宽幅扫描SW120~49100500x500超高入射角模式H1~H649~592575x75超低入射角模式L110~2335170x170原始信号级RAW 原始信号产品(Raw Signal Data Product)以复型方式将未经压缩成像处理的雷达信号数据记录在介质上。
北京揽宇方圆信息技术有限公司
热线:4006019091
第 1 页 WorldView-Ⅲ卫星影像数据
该卫星于8月13日宣布成功发射WorldView-3卫星,具有高光谱和高分辨率的优势。
WorldView-3号卫星将以0.31米的分辨率进行高光谱图像的采集,图像的清晰度将是其他卫星公司的5倍。
除此之外,WorldView-3还将为用户提供光谱分布最为丰富的商业卫星图像,并将成为第一颗提供多种短波红外线(SWIR)波段的卫星,它使透过雾霾、烟尘以及其他空气颗粒进行精确图像采集成为可能。
WorldView-3也是唯一一颗装备CAVIS 装置(云层、气溶胶、水汽、冰雪等气象条件下的大气校正设备)的卫星,通过该装置可以对气象条件进行监测并进行数据的校正,这也将达到一个前所未有的技术水平。
WorldView-3卫星的发射开创了更高级别清晰度的卫星影像新时代,也使DigitalGlobe 进一步扩展了其图像产品范围,将为各大地图供应商提供更好的卫星影像解决方案。
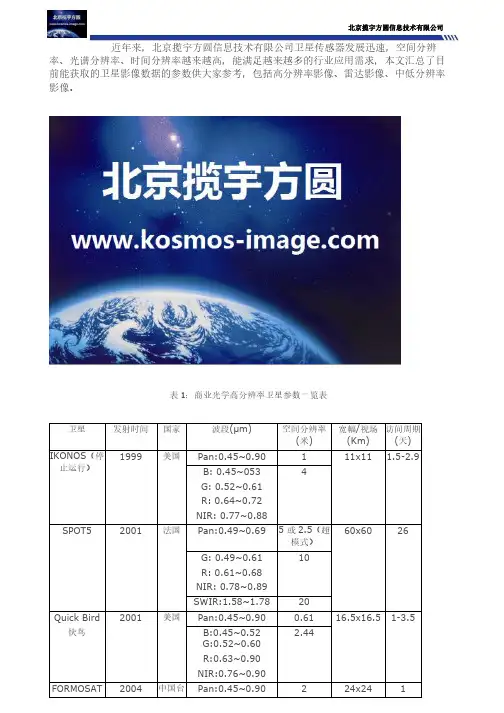
北京揽宇方圆信息技术有限公司近年来,北京揽宇方圆信息技术有限公司卫星传感器发展迅速,空间分辨率、光谱分辨率、时间分辨率越来越高,能满足越来越多的行业应用需求,本文汇总了目前能获取的卫星影像数据的参数供大家参考,包括高分辨率影像、雷达影像、中低分辨率影像。
表1:商业光学高分辨率卫星参数一览表卫星发射时间国家波段(μm)空间分辨率(米)宽幅/视场(Km)访问周期(天)IKONOS (停止运行)1999美国Pan:0.45~0.90111x111.5-2.9B:0.45~053G:0.52~0.61R:0.64~0.72NIR:0.77~0.884SPOT52001法国Pan:0.49~0.695或2.5(超模式)60x6026G:0.49~0.61R:0.61~0.68NIR:0.78~0.8910SWIR:1.58~1.7820Quick Bird快鸟2001美国Pan:0.45~0.900.6116.5x16.51-3.5B:0.45~0.52G:0.52~0.60R:0.63~0.90NIR:0.76~0.902.44FORMOSAT 2004中国台Pan:0.45~0.90224x241II湾B:0.45~0.52G:0.52~0.60R:0.63~0.69NIR:0,76~0,908EROS-B2006以色列Pan:0.50~0.900.77x7、7x140(条带)5CartoSAT-1(P5)2005印度Pan:0.50~0.85 2.530x305ALOS(已停止运行)2005日本Pan:0.52~0.77 2.535x352B:0.42~0.50G:0.52~0.60R:0.61~0.69NIR:0.76~0.891070x70北京一号小卫星2005中国Pan:0.500~0.800424.2x24.23-5G:0.523~0.605R:0.630~0.690NIR:0.774~0.932600x600KOMPSAT-22006韩国Pan:0.50~0.90115x153B:0.45~0.52G:0.52~0.60R:0.63~0.69NIR:0.76~0.904WorldView-1、2 (WorldView-1只有全色波段)20082009(WV2)美国Pan:0.450~0.8000.530x30或60x601.1-3.7蓝:0.450~0.510绿:0.510~0.580红:0.630~0.690近:0.770~0.895海岸:0.400~0.450黄色:0.585~0.625红边:0.7055~0.745近2:0.860~1.0402.4GEOEye-12008美国Pan:0.45~0.900.41(0.5)15x152-3B:0.45~0.51G:0.51~0.58R:0.655~0.690NIR:0.78~0.921.65RapidEye2008德国蓝:0.440~0.510绿:0.520~0.590红:0.630~0.685红边:0.690~0.730近红外:0.760~0.8505.877x77每天Pleiades-12011法国全色:0.480-0.8300.520x20100x10020x280每天蓝:0.430~0.550绿:0.490~0.6102红:0.600~0.720近红外:0.750~0.950SPOT62012法国全色:0.455~0.7451.560x602-3蓝:0.455~0.525绿:0.530µm~0.590红:0.625~0.695近红外:0.760~0.8906表2:国产资源一号02C、资源三号卫星平台有效载荷波段光谱范围(μm)空间分辨率(米)幅宽(米)侧摆能力重访时间(天)ZY-1-02C2台HR相机-0.50~0.80 2.3654两台拼接±25°3~5全色/多光谱相机10.51~0.85560±25°3~5 20.52~0.591030.63~0.6940.77~0.89资源三号前视相机-0.50~0.80 3.552±32°3~5后视相机-0.50~0.80 3.552±32°3~5正视相机-0.50~0.80 2.151±32°3~5多光谱相机10.45~0.52651±32°520.52~0.5930.63~0.6940.77~0.89表3:星载雷达系统一览表系统发射时间波段极化图幅宽度(KM)分辨率重复周期轨道精度(cm)接受模式国家ERS-21995C VV10025m3530Stripmap欧洲RADASAT11995C VV10-50010-30-10024>100StripmapScanSAR加拿大ENVISAT (已停止运行)2002C VV100-400203530StripmapScanSAR欧洲ALOS(已停止运行)2006L Full40-3507-14-10046>100Stripmap日本TerraSAR-X 2007X Full5-10-30-1001-3-161110SpotlightStripmapScanSAR德国Cosmo-skymed 2007X,L Full10-30-2001-3-151-1610SpotlightStripmapScanSAR意大利RADASAT22007C Full10-5003-1001-2410SpotlightStripmapScanSAR 加拿大环境小卫星C星2012S/52040100///中国表4:其他卫星一览表传感器发射时间国家多光谱波段空间分辨率(米)Landsat1~772~99美国蓝、绿、红、近红外、短波红外、热红外15、30、60、80、120SPOT41999法国绿、红、近红外、中远红外全色:10多光谱:20中巴资源卫星1999中国蓝、绿、红、近红外多光谱:19.5Resourcesat (P6)2003印度绿、红、近红外、短波红外多光谱24米全色5.8米NOAA气象卫星/美国红、近红外、中红外和两个热红外1100风云系列卫星/中国可见光4个,近红外2个,中远红外2个,热红外2个。
北京揽宇方圆信息技术有限公司ALOS-2雷达卫星影像的分析应用日本宇航局从ALOS-2卫星上的相控阵式L波段孔径雷达PALSAR-2获取到了以下影像。
ALOS-2卫星于2014年5月24日发射升空,它获取到的数据将有助于灾难损害监测、森林砍伐监测和海冰观测等。
ALOS-2是利用L波段频率的星载合成孔径雷达卫星,适用于全天候全天时对地球表面进行观测。
以下为ALOS卫星在测试阶段获取到的图像:图1:ALOS-2卫星关东地区影像图1成像于日本时间2014年6月19日上午11时43分,影像采用的观测模式为条带模式,分辨率约为3米。
3米的分辨率是所有安装在对地观测卫星上的L波段合成孔径雷达最优的分辨率,这样高的分辨率将能够更准确的帮助了解地区情况。
图2:ALOS-2及其他卫星东京迪士尼乐园区影像对比图图2为同一区域三颗采用L波段合成孔径雷达的卫星影像对比图,其中左边的图为1992年发射的FUYO-1卫星,中间的图为2006年发射的ALOS卫星。
通过对比可以看出,ALOS-2卫星的分辨率更高。
图3:ALOS-2伊豆大岛区域影像左图为伊豆大岛区域某一个小岛的影像,右图为由ALOS-2上PROSM 传感器所得的高程数据制作而成的鸟瞰图。
图中红色圈圈的区域内呈黑色的部分为2013年10月台风过境引起的大型山体滑坡留下的痕迹。
本图是采用观测到的极化数据制成的假彩色影像,图中绿色代表植被,浅紫色和黄绿色代表城市区域,深紫色代表裸地,这样的影像能够更精确的了解和区分出土地覆盖类型。
图4:ALOS-2和搭载合成孔径雷达的飞机分别拍下的影像右图成像于日本时间2014年6月20日下午10点53分,采用的观测模式为条带式,分辨率约为3米。
左图为搭载了L波段合成孔径雷达的飞机所摄,成像时间为2014年2月4日。
两相对比可以知道,前后相隔约4个月的时间内,由于火山爆发,岛屿面积变大,约增加了0.67平方公里。
右图是在夜间进行观测所得,它也证明了合成孔径雷达可以穿透火山喷发带来的烟雾,因此ALOS-2卫星适用于持续监测火山喷发活动。
高分二号卫星影像--国产卫星数据应用平台北京揽宇方圆
北京揽宇方圆信息技术有限公司的高分二号卫星是我国自主研制的首颗空间分辨率优于1米的民用光学遥感卫星,搭载有两台高分辨率1米全色、4米多光谱相机,具有亚米级空间分辨率、高定位精度和快速姿态机动能力等特点,有效地提升了卫星综合观测效能,达到了国际先进水平。
高分二号卫星于2014年8月19日成功发射,8月21日首次开机成像并下传数据。
这是我国目前分辨率最高的民用陆地观测卫星,星下点空间分辨率可达0.8米,标志着我国遥感卫星进入了亚米级“高分时代”。
主要用户为国土资源部、住房和城乡建设部、交通运输部和国家林业局等部门,同时还将为其他用户部门和有关区域提供示范应用服务。
国产卫星数据应用平台北京揽宇方圆信息技术有限公司提供国产卫星影像资源三号卫星影像高分二号卫星影像高分一号卫星影像.
GF-2卫星轨道参数
参数指标
轨道类型太阳同步回归轨道
轨道高度631km
轨道倾角97.9080°
降交点地方时10:30 AM
回归周期69天
GF-2卫星有效载荷参数
载荷谱段号谱段范围(µm) 空间分辨率
(m)
幅宽(km) 侧摆能力
重访时间
(天)
全色多光谱
相机1 0.45~0.90 1
45
(2台相机
组合)
±35 5 2 0.45~0.52
4
3 0.52~0.59
4 0.63~0.69
5 0.77~0.89。
Sentinel-3卫星影像介绍-北京揽宇方圆Sentinel-3卫星是欧空局(ESA)和欧洲委员会(EC)卫星项目,该项目属于全球环境与安全监视(GMES)计划,负责应对近实时对海洋、陆地、冰盖监视的需求,要求监测的时间超过20年。
该任务对地形要素的勘测将服务于基本海洋行动,并且可以用于对海洋冰和陆地冰的监测。
利用全新的观测技术,Sentinel-3卫星任务被设计成由两颗一样的卫星组成的星座,并飞行于同一条轨道上,相位相差180º。
为了满足长期对海洋及陆地的监测任务,该任务卫星的性能设计中具有较强的数据产品下传能力。
Sentinel-3卫星的主要观测任务目标可以总结为以下几项:海洋和陆地的彩色成像数据,摆脱了太阳闪烁带来的干扰,重访时间4天(最优目标是2天),在数据质量上至少等价于Envisat卫星的Meris载荷。
实际在赤道附近的海洋表面重访时间(最坏情况)少于3.8天(单星实现的目标),若双星组网工作,则须减少到1.9天。
两颗卫星共轨道面,相位差180º。
海洋和陆地表面的温度数据获取,在数据质量上至少等价于Envisat卫星的AATSR载荷。
地球表面地形观测应覆盖全球海洋冰提供海洋表面高度以及主要海波的高度,数据精度至少等价于Envisat卫星的RA-2载荷。
此外Sentinel-3卫星还要接续CryoSat-2卫星提供地表高度测量数据(在选定的轨道弧段,测量冰盖表面),以及陆地区域水体表面高度(江河与湖泊)。
图1:Sentinel-3卫星在轨飞行想象图卫星情况:Sentinel-3卫星由Thales Alenia Space-法国(简称TAS-F)负责建造,这项任务的合同于2008年4月14日签署,卫星为三轴稳定控制模式,卫星正常姿态指向星下点,为了补偿地球自转的影响进行了偏流角控制。
卫星发射重量1150kg,卫星本体高3.9m,总功耗1100W,设计寿命7.5年,载有约100kg 肼燃料足够12年寿命期间使用,还包括了寿命结束时离轨所需的燃料。
哨兵卫星系例Sentinel-1卫星影像介绍-北京揽宇方圆Sentinel-1是欧洲雷达遥感卫星,该卫星是全球环境和安全监视(Global Monitoring for Environment and Security简称GMES)系列卫星的第一个组成部分。
卫星由欧盟投资并由ESA负责研发,哥白尼任务(包括Sentinel-1、-2、-3)代表欧盟加入全球遥感系统(Global Earth Observation System of Systems简称GEOSS)。
Sentinel-1作为一个星座包含两颗卫星,分别是Sentinel-1A和Sentinel-1B,在同一轨道平面内,相位相差180º,任务提供了一种可以使用雷达独立连续测绘地图的能力,拥有更高的重访频率,更好的覆盖能力,更好的时效性和可靠性。
Sentinel-1任务的总体目标是提供连续的C波段合成孔径雷达遥感应用,主要服务于欧洲,特别是为ESA的GMES项目提供数据服务。
该任务的关键设计参数在于重访时间、覆盖性、时效性。
还结合了雷达频率谱段、极化方向、分辨率及其他成像质量参数。
更短的重访时间要求卫星具有适合的轨道选择和较宽的覆盖视野。
根据任务概念的设计,系统包括两颗SAR遥感卫星。
每颗卫星都具有4种常规工作模式以便最大程度地满足用户的需求。
卫星的轨道采用近极的太阳同步轨道,重访周期12天,轨迹回归周期175天。
工作模式:条带绘图模式(SM):80km扫描幅宽,5m×5m分辨率,单视。
干涉宽视场模式(IWS):240km幅宽,5m×20m分辨率,三视。
超宽视场模式(EWS):400幅宽,单视。
波模式(WM):20km x20km马赛克成像,20m x5m分辨率,单视。
极化模式:在所有工作模式中实现双极化VV+VH或HH+HV。
操作要求:具备一致的、可靠的和无冲突的任务操作能力。
接近实时的数据投送能力,最差情况3小时,最好目标为1小时。
Geolocation Accuracy of WorldView Products IntroductionDigitalGlobe owns and operates a world-class constellation of high resolution, high accuracy Earth imaging satellites. Geolocation accuracy testing is performed on a regular basis by comparing images to highly accurate ground control points. This paper discusses the process that is used to assess geolocation accuracy and the resulting accuracy statements for WorldView-1 and WorldView-2 satellite products.DigitalGlobe offers a range of imagery products with a variety of processing, radiometric correction, and geometric enhancement options which result in differing levels of accuracy. The product levels are summarized in Table 1: WorldView Product Summary.Core ProductsGeolocation AccuracySpecificationsProcessing GeographicAvailabilityRadiometrically &sensor correctedGeorectified OrthorectifiedCE90/LE90RMSE NMASScaleBasic 5 m* 2.3m*N/A ●WorldwideBasic StereoPair5 m*/5 m 2.3m N/A ●Worldwide Standard 5 m* 2.3m*N/A ●●WorldwideOrtho ReadyStandard5 m* 2.3m*N/A ●●WorldwideOrtho ReadyStereo5 m*/5 m 3.3m N/A ●●WorldwideAdvanced Ortho Series Precision 4.2 m 2.0 m 1:5,000 ●●Worldwide, limited tofine DEM coverage(SRTM + USGS NED)Advanced Ortho Series Mapping 10.2 m 4.8 m 1:12,000 ●●Worldwide, limited tofine DEM coverage(SRTM + USGS NED)Advanced Ortho Series Display 25.4 m 11.8 m 1:50,000 ●●Worldwide, limited tofine DEM coverage(SRTM + USGS NED)TABLE 1: WORLDVIEW PRODUCT SUMMARY* LESS THAN 30 DEGREES OFF NADIR AND EXCLUDING TERRAIN EFFECTSFor more detail on the products available and processing levels, please refer to the Product Guide at Measuring Geolocation AccuracyAbsolute geolocation accuracy is a measure of the location of an object, as it appears in a product, with respect to its true location on the Earth. Geolocation accuracy is driven by the sensors and models used in the imagery collection system and by terrain displacement when the image pixels are projected to a surface on the Earth.Geolocation accuracy is determined by comparing a known, surveyed location (typically a ground control point), to the corresponding photo-identifiable feature in an image product. For an individual control point, the geolocation error is measured by calculating the difference between the observed location in the product and the known, surveyed location.DigitalGlobe specifies geolocation accuracy using the CE90 and LE90 standards. CE90 is the circular error at the 90th percentile. This means that a minimum of 90 percent of the points measured has a horizontal error less than the stated CE90 value. LE90 is the 90th percentile linear error, meaning that a minimum of 90 percent of vertical errors fall within the stated LE90 value.The geolocation accuracy of WorldView products is specified in Table 1: WorldView Product Summary. The specified accuracy is valid for all WorldView images collected with a satellite off-nadir angle of less than 30 degrees. Accuracy for Basic and Standard products excludes terrain-induced offsets due to projection to a coarse digital elevation model or datum, which is a constant surface used to represent the Earth.Horizontal Accuracy of WorldView Basic and Standard ProductsBasic, Standard and Ortho Ready Standard products are not corrected for terrain-induced offsets. In order to determine the location of a feature in the image, the feature must be projected to known height.To determine horizontal accuracy, a ground control point (GCP) with known horizontal and vertical locations is identified in the image. The pixel representing that GCP is projected to the vertical height of the GCP, and the resulting location of the pixel is calculated. The error between the location of the projected pixel and the GCP is the error for that point.Figure 1 shows a known GCP that has been measured on the ground, and the GCPs actual geodetic location. The pixel representing that point in the image is projected from the satellite to the known height of the GCP, and the apparent geodetic location of the pixel is calculated. The difference between the actual geodetic location and the apparent geodetic location is the error for that pixel.When measuring the geolocation accuracy of a satellite imaging system, a large number of images are used to determine the CE90 with sufficient confidence. The CE90 for a set of images is the value that, if represented as a radius of a circle, would be greater than 90% of all measured image error values.Basic and Standard product accuracy represents the pointing accuracy of the satellite. This pointing accuracy is a different measure of accuracy than map accuracy. For this reason, the reported CE90 values for Basic and Standard products are lower than those for ortho products.FIGURE 1: ACCURACY WITH NO TERRAIN CORRECTIONThe WorldView-1 horizontal accuracy is provided in Figure 2. In this scatter plot, the average two-dimensional geolocation accuracy for each of the 979 measured images is shown by a marker. The horizontal and vertical axes are error in the East and North directions, respectively, both in units of meters. The calculated CE90 accuracy of the entire group of images was 4.0 meters, and is signified by the black circle located on the plot.The WorldView-1 horizontal accuracy versus time is provided in Figure 3. The images measured spanned a time period of twelve months, from October 1, 2010, to September 30, 2011. The calculated CE90 accuracy for each quarter over the test period is shown to exhibit the accuracy stability over time. WorldView-1 accuracy performance is better than the 5 meter accuracy specification, which is represented by the black line on the plot.CE90 = 4.0 mFIGURE 2: HORIZONTAL ACCURACY OF WORLDVIEW-1 BASIC AND STANDARD PRODUCTSFIGURE 3: WORLDVIEW-1 CE90The WorldView-2 horizontal accuracy is provided in Figure 3. In this scatter plot, the average two-dimensional geolocation accuracy for each of the 4,412 measured images is shown by a marker. The horizontal and vertical axes are error in the East andNorth directions, respectively, both in units of meters. The calculated CE90 accuracy of the entire group of images was 3.5 meters, and is signified by the black circle located on the plot.The WorldView-2 horizontal accuracy from October 1, 2010 to September 30, 2011, is provided in Figure 4. The calculated CE90 accuracy for each quarter over the test period illustrates consistent accuracy over time. WorldView-2 accuracy performance is better than the 5 meter accuracy specification, which is represented by the black line on the plot.FIGURE 4: HORIZONTAL ACCURACY OF WORLDVIEW-2 BASIC AND STANDARD PRODUCTSFIGURE 5: WORLDVIEW-2 CE90Vertical Accuracy of WorldView Basic and Standard ProductsVertical accuracy is measured using the Basic Stereo product. For vertical accuracy, the pixel locations corresponding to a ground control point for each image of a stereo pair are combined to determine the estimated height. A vertical error relative to the known height is then measured. For a set of control points in the stereo pair, the LE90 accuracy is then calculated. Side by side experiments have shown that vertical accuracy achieved by Basic and Ortho Ready Standard products agree to within a fraction of a pixel.Like horizontal accuracy, when dealing with vertical accuracy of a satellite imaging system, a large number of images are used to determine LE90 with sufficient confidence. However, due to the labor-intensive nature of working with stereo products, the number of test images to determine LE90 is lower than that used for CE90. The average vertical accuracy for each image is calculated and the LE90 of the group of images is the 90th percentile of the sorted vertical accuracies. The system LE90 will include 90 percent of all images measured.WorldView-1 and WorldView-2 vertical accuracy results are provided in Figures 6 and 7, respectively. The results are shown by quarter over the test period of October 1, 2010, through September 30, 2011. The WorldView-1 LE90 for the entire period was 3.7 meters, using 181 Basic Stereo products. The WorldView-2 LE90 for the entire period was 3.6 meters, using 160 Basic Stereo products. WorldView-1 and 2 vertical accuracy performance meets the 5 meter accuracy specification, which is represented by the black line on the plots.FIGURE 6: VERTICAL LE90 ACCURACY OF WORLDVIEW-1 BASIC AND STANDARD PRODUCTSFIGURE 7: VERTICAL LE90 ACCURACY OF WORLDVIEW-2 BASIC AND STANDARD PRODUCTSAccuracy of WorldView Orthorectified ProductsGeolocation accuracy of ortho products is determined by creating ortho products over sites that contain a dense network of surveyed ground control points. The ground control points are used for accuracy testing purposes and are not used to correct the position of the image. The difference in the location of feature representing the control point in the image, and actual location of the control point is measured in the image. This difference is the error for that pixel. The errors for all the control points in the image are measured and these errors are used to calculate the accuracy of the image.Figure 8 shows how errors in the elevation model will result in errors in the positional accuracy of the orthorectified product. When an image is orthorectified, the pixels are projected from the satellite to the elevation model, and projected down to the mapping datum. As seen in figure 8, differences between the elevation model and the terrain will result in errors of the location of features in the image.With orthorectified products, the image is corrected to a map projection, and each pixel has a map coordinate. Therefore the error of the control points can be measured directly in the image.Basic and Standard products have error values that are lower than orthos because the accuracy values do not include error introduced by the DEM. However, ortho products are more accurate and more representative of a true location on the Earth’s surface.FIGURE 8: ACCURACY WITH TERRAIN CORRECTEDA study of 83 WorldView-1 and 97 WorldView-2 ortho products was conducted to determine the overall accuracy of WorldView ortho products. Accuracy was determined by measuring the difference in the coordinates of the surveyed feature and the coordinates of that corresponding feature in the ortho product. The CE90 was calculated for the set of measured ground control points in each image. Finally, the system CE90 was determined for each group of WorldView-1 and WorldView-2 images.CE90 = 5.0 mFIGURE 9: ACCURACY OF WORLDVIEW-1 ORTHORECTIFIED PRODUCTSThe accuracy of WorldView-1 ortho products is provided in Figure 9. There was a total of 818 point residuals measured from the 83 image products. Due to variations in collection geometry and therefore terrain error over the image strip, the error value for each point in every image is shown by a marker in this scatter plot. For ortho products, this provides a more complete representation of the error bias for each image strip. The horizontal and vertical axes are error in the East and North directions, respectively, both in units of meters. The calculated CE90 accuracy of the entire group of images was 5.0 meters, and is represented by the black circle located on the plot.CE90 = 5.4 mFIGURE 10: ACCURACY OF WORLDVIEW-2 ORTHORECTIFIED PRODUCTSThe accuracy of WorldView-2 ortho products is provided in Figure 10. There was a total of 790 point residuals measured from the 97 image products. The error value for each point in each sample image is shown by a marker in the scatter plot. The horizontal and vertical axes are error in the East and North directions, respectively, both in units of meters. The calculated CE90 accuracy of the entire group of images was 5.4 meters, and is represented by the black circle located on the plot.SummaryDigitalGlobe offers a range of WorldView imagery products, from Basic and Standard to Orthorectified. The horizontal accuracy specification for WorldView Basic and Standard products is 5 meters CE90, meaning that 90 percent of all WorldView Basic and Standard products will achieve a horizontal accuracy of 5 meters or better. The vertical accuracy for Basic and Ortho Ready Standard Stereo products is 5 meters LE90, meaning that 90 percent of all WorldView Basic and Standard products will achieve a vertical accuracy of 5 meters or better.Horizontal accuracy was measured for 979 WorldView-1 images and 4,412 WorldView-2 Basic and Standard images. The resulting horizontal accuracy for WorldView-1 was 4.0 meters CE90, and WorldView-2 demonstrated an accuracy of 3.5 meters CE90. Vertical accuracy was measured for 181 WorldView-1 and 160 WorldView-2 Basic products, resulting in vertical accuracy for WorldView-1 of 3.7 meters LE90 and vertical accuracy of 3.6 meters LE90 for WorldView-2. There is a significant margin between demonstrated horizontal and vertical accuracies and their respective 5 meter CE90 and LE90 product specifications to account for extreme terrain.The accuracy was measured for 83 WorldView-1 and 97 WorldView-2 ortho products and resulted in a demonstrated accuracy of 5.0 meters CE90 for WorldView-1, and 5.4 meters CE90 for WorldView-2.。
北京揽宇方圆信息技术有限公司
真彩色卫星影像图
北京揽宇方圆信息技术有限公司的全国真彩色卫星影像图以我国首颗自主的民用高分辨率立体测绘卫星“资源三号卫星”为主要卫星数据源,结合天绘、高分等卫星影像,覆盖全国的陆地国土面积。
北京揽宇方圆信息技术有限公司是中国领先的遥感卫星影像数据牵头企业,负责国产最高分辨率遥感卫星资源三号卫星影像高分一号卫星影像高分二号卫星影像及后续国产卫星的应用与推广服务。
公司依托国家资源卫星应用中心雄厚的科研和技术优势,以卫星影像产品和专业服务为客户提供卫星遥感数据的获取、处理及应用整体解决方案。
两米空间分辨率影像的全国无缝覆盖真彩色正射卫星影像库一年一版图,全图经分区域无控自由网平差、正射纠正、融合、匀光、镶嵌而成,影像几何分辨率均达到2.1米,几何定位精度优于25米,局部优于10米;全图影像清晰、色彩鲜艳,与目前主流影像地图相比,具有在城市郊区影像时相更新、我国西部边远地区全覆盖等特点。
目前,该影像图已经在国土调查、导航地图更新、水土流失监测、林业调查等领域得到应用。
是目前国内解析度最高、覆盖最全、时相最新的公共数字正射影像。
全国数字表面模型数据库与国际上主流的同类产品相比,具有更高的空间解析度和时间解析度,对山区、平原、城市局部细节纹理表达更加精细和保真。
可用作各行业GIS系统底图,满足GIS用户“即插即用”的数据需求。
作为当前分辨率率最高的全国级别覆盖的真彩色正射卫星影像库,该产品具备现势性强、价格优惠、分发灵活等特点,是各行业GIS底图产品的理想选择。
公司地址:北京市丰台区南三环万柳桥宝隆大厦1-1626电话:4006019091010-57113949。
北京揽宇方圆信息技术有限公司一、高清卫星影像数据生产,按照合同约定,项目经理组织生产。
二、提交的产品,满足以下参数要求:1.时间要求:成像时间2014年(含)以后2.面积:大于200万平方公里,包括四川、重庆、云南、甘肃、安徽、湖南、湖北、江苏等全部。
3.精度要求:满足1:5万比例尺精度要求,重点保证覆盖辖区内城市建成区、村镇、道路、桥梁、河流等重要目标地物。
4.空间分辨率:优于2.5米5.数据格式:GeoTIFF或IMG6.坐标系:WGS84或者2000坐标系7.卫星影像数据整体色调一致,接近自然色;8.卫星影像数据应具有较好的平面定位精度,不低于10米;9.卫星影像数据拼接精度应高于2个像元,不存在裂缝、错位等情况。
10.合同签订后在7个工作日内,提交影像产品。
三、提交的影像产品在满足招标要求的四川、重庆、云南、甘肃、安徽、湖南、湖北、江苏8个省的基础上,考虑到自然灾害发生时间和地点的不确定性,我方承诺中标后一年内将按照甲方的需求额外提供部分省市的遥感影像,以满足甲方灾害应急需求。
如一年中没有发生重大灾害,我方同样承诺中标后可以额外提供采购方采购面积的20%的影像产品。
四、交货方式:由于数据量比较大,采用移动硬盘为介质给甲方提供影像产品五、提交产品的格式:提供按照1:5万标注分幅的分幅影像,数据格式为GEOTIFF六、验收:按合同时间要求供货,配合甲方进行验收,安装验收是我公司和甲方单位共同对影像产品根据有关的产品技术指标进行验收。
安装验收后双方签署安装验收证书。
供应商全称(盖章):北京揽宇方圆信息技术有限公司全权代表(签字):附件14-4影像产品生产技术流程1原始影像检查1.1完整性检查对原始卫星影像压缩包解压缩,查看影像数据、RPC文件、XML元文件等内容是否缺失,文件是否可读。
1.2数据源覆盖根据数据的经纬度范围,制作数据源覆盖范围矢量文件,叠加工作区范围,检查数据源的覆盖状况及不同数据源的覆盖范围。
1.3时相根据影像的头文件的信息,统计并制作影像时相分布图,检查影像时相是否符合项目的要求。
1.4重叠区根据影像的覆盖矢量文件检查相邻景之间的重叠区是否大于2%,不符合要求的数据需重新选取订购。
1.5云量检查每景影像的云、雪、雾覆盖状况,并列表记录其覆盖位置、覆盖量、是否覆盖重点关注区域。
1.6入射角根据影像的头文件,检查每景影像的入射角,确认入射角是否符合项目的要求。
1.7纹理根据影像的快视图,先对影像质量总体情进行检查,对疑似有问题的,打开影像文件进行重点检查。
对全色影像的纹理细节、多光谱影像的光谱丰富程度、多光谱波段间匹配程度等进行全面检查,并记录质量不合格影像,以及质量问题描述。
2正射影像图制作2.1多源包正射校正本项目的卫星影像正射校正采用正射参考影像和DEM资料,根据卫星影像1A级数据提供的RPC参数,通过RPC模型对遥感图像进行投影差改正和地理编码。
影像的矫正流程如下图:国产卫星影像的正射校正采用多源包软件全自动校正,主要采用整体校正,整体校正可以提高影像的接边精度。
一、多源包整体校正当工作区涉及连片多景同源影像时可进行整体校正,以工作区为校正单元进行区域网平差,以每景影像控制点数最少不低于9个,分布于每景影像的四周及中间(如图5-25),且相邻景重叠区域控制点不少于4个共用控制点。
根据选取的控制点,对工作区内全色数据进行区域网联合平差,剔除和调整残差较大的控制点,在各景控制点满足区域网误差要求的基础上,对景与景之间的重叠区域自动提取同名点,并剔除残差较大的同名点,直至同名点误差满足规定要求,提高影像接边精度。
整体校正过程中没有对影像的灰度和反差进行拉伸,没有改变像素位数,校正后的正射影像有效数据范围内没有漏洞区。
1)校正模型:RPC模型;2)控制点选取:多源包软件自动获取待校正影像和参考影像间的同名点,并根据分布情况进行取舍;3)校正控制点残差:残差中误差不大于合同规定,取中误差的两倍为其最大误差;4)连接点选取:在相邻景重叠区域内,选取不少于3个同名像点作为连接点,景与景之间重叠较大时要选双排点。
连接点中误差控制在2个像素以内。
图4-2整体校正控制点选取示意图2.2位深调整原始卫星影像是10bit量化,16bit存储的,为了最大程度保留原始影像的信息,在正射、配准和融合处理中我们都没有进行位深调整,结果都是16bit。
保留了一套完整的“无损”信息成果,有利于用户今后的自动化信息提取。
同时对于后续的匀色镶嵌成图处理,必须要把16bit影像转换为8bit,这样可以使影像色调清晰、色彩合理、易于目视判读。
调色降位会降低原始影像的信息量,因此为了使信息量的损失降到最低,使影像直方图呈正态分布,红、绿、蓝三个波段信息分布均衡,色彩自然,保持影像信息量丰富,建筑物、水利设施等纹理清晰。
2.3匀色镶嵌1、匀色镶嵌处理步骤和原则通过镶嵌线对融合后的DOM影像进行镶嵌处理,对相邻镶嵌区域间影像的匀色处理,保持景与景之间接边处色彩过渡自然,地物合理接边,无重影和发虚现象。
保持地物的完整性和合理性。
色彩调整后,正射影像的直方图大致成正态分布,影像清晰,反差适中,色彩自然,无因太亮或太暗失去细节的区域。
(1)镶嵌前检查镶嵌前精度检查主要是通过影像叠加显示、量测、目视观察等方法进行。
具体要求及方法如下:1)景与景之间同名地物点接边误差应满足合同要求;2)相邻景的同一线性地物是否保持连续,如接边误差不超限,出现线性地物连接错位现象时,应进行局部校正;接边超限时应查明原因,并进行必要的返工;3)时相相同或相近的镶嵌影像纹理、色彩应自然过渡;时相差距较大、地物特征差异明显的镶嵌影像,允许存在光谱差异,但同一地块内光谱特征应尽量一致。
(2)彩色组合方式影像镶嵌采用RED、GREEN、BLUE的真彩色波段组合方式,即选择波段3/2/1的顺序作为红、绿、蓝三通道进行影像镶嵌波段组合,其中ZY3、GF1、GF2和SJ-9数据为蓝/绿/红/近红外4波段数据,可直接选择3、2、1进行数据波段组合,但是ZY01-02C数据只有绿/红/近红外三个波段,没有蓝色波段通道,因此需要对ZY01-02C数据进行模拟真彩色。
(3)镶嵌原则根据工作区影像成果情况,保证在重叠区域合理使用各种影像资料:1)前期制作成果优先于后期制作成果;2)高分辨率成果优先于低分辨率成果;3)同期成果影像质量好的成果优先于质量相对差的成果(影像质量包括光谱信息、噪声、斑点、饱和度、云雪覆盖等方面)。
2、镶嵌线选择采用“计算机自动选取为主、人工选取为辅,计算机自动选取与人工选取相结合”的方式,选择合适镶嵌线。
镶嵌线应尽量选取线状地物或地块边界等明显分界线,避开云、雾、雪及其他质量相对较差的区域,使镶嵌处无裂缝、模糊、重影现象。
时相相同或相近的镶嵌影像纹理、色彩自然过渡,不同时相影像镶嵌时保证同一地块内纹理、色彩一致。
3、精度检查1)影像镶嵌处是否存在裂缝、错位、模糊、扭曲和重影现象。
2)时相相同或相近的镶嵌影像,纹理、色彩是否过渡自然。
如果出现上述情况应及时查清原因,进行必要的返工,直到满足要求为止。
4、多源包中自动匀色镶嵌处理(1)镶嵌预处理在进行正式镶嵌之前允许用户首先进行影像的预镶嵌。
用户可通过预镶嵌进行接边线自动采集和影像自动匀色或手动匀色,同时可生成一个低分辨率的预览效果图。
同时用户也可以对预镶嵌采集的接边线进行手动编辑,并正式应用到影像正式镶嵌结果中。
主要包括自动匀色均衡和接边线自动采集两种技术。
(2)匀色均衡PCI Geomatics提供了多种匀色技术,GXL提供了五个算法供用户选择来改善镶嵌影像的匀色处理:1)OVERLAP(叠加)该匀色算法基于匹配输入影像的重叠区域。
系统在重叠区域进行最小二乘分析,以确定最终镶嵌的最佳辐射差异,然后当每个影像加入镶嵌文件时对其进行辐射变换。
此方法需要每对输入栅格相邻影像具备足够的重叠度——例如大于10%,以及高质量地理参考。
如果影像间由于不同的光照和视角,使得同一特征在重叠影像中看起来存在差异,则不会得到理想的效果。
如果采用此匀色方法并指定局部(LOCLMASK)或全局(GLOBMASK)掩膜,掩膜中必须包含重叠区域的部分像元,以便影像输出。
2)LUT(查找表)该匀色算法基于预先存放于源影像中、用于匀色的查找表(LUT)段。
它将为所有影像通道寻找一个LUT 段。
例如:将一幅RGB彩色影像加入镶嵌文件,每个输入文件将需要3个LUT段。
3)HISTOGRAM(直方图)该匀色算法基于按顺序用输入影像匹配目标镶嵌影像直方图。
此外,HISTOGRAM方法也可以包含一个区域倍数和一个直方图末端修整百分比。
该方法按顺序将输入影像匹配至目标镶嵌影像。
同时,它还支持使用专用的掩膜。
该方法不需要十分精确的地理参考和高重叠度,对于更大的数据集效果会更好。
4)REFERENCE(参考)该匀色算法基于将原影像直方图与特定参考影像直方图匹配。
可选地,REFERENCE方法可以包含一个区域倍数和一个直方图末端修整百分比。
该方法不需要十分精确的地理参考和高重叠度,对于同一辐射度分布的数据集效果会更好。
参考影像不需要与输入影像拥有相同分辨率或投影,因为它可以重投影至输入影像的投影。
5)NEIGHBORHOOD(邻域)该算法基于相邻区域的像素值,确定一系列模型的系数,然后应用模型来调整图像的色彩。
算法采用循序渐进迭代法,直到相邻区域的像素值一样为止。
(3)创建拼接线GXL主要提供了如下几种接边线自动采集方法:1)MINDIFF最小差异方法该方法适于镶嵌的大多数情况。
该算法针对区域内同一地点灰度值最小差异,确定每个相邻影像重叠区域的拼接线。
2)MINRELDIFF最小相对差异方法该算法针对区域内同一地点灰度值变化的最小差异,确定每个相邻影像重叠区域的拼接线。
该方法用在不同影像相同部分的数据看起来完全不同的情况下效果更加。
3)EDGE边缘特征方法该方法用于城区镶嵌、或影像包含很多线性特征地物的效果更好。
EDGE方法的目的是避免拼接线穿越线性特征地物。
MAXDATA代表拼接线在实际影像像元的界限上。
(亦即:当确定影像边界时,无数据像元将被忽略)(4)预处理启动并输入镶嵌预处理模块参数,在提交作业界面中单击镶嵌预处理,镶嵌预处理模块参数输入界面随即打开,如下图所示:图4-3镶嵌预处理模块参数输入界面图(5)影像镶嵌处理影像镶嵌是镶嵌预处理的后续操作。
须首先进行镶嵌预处理以生成包含匀色效果和接边线的xml文件,随后才能利用该xml文件进行对应的影像镶嵌。
3质量检查和控制措施及时对处理成果进行检查,对检查过程中出现的问题进行文字记录,为DOM数据处理提供依据。
3.1遥感影像纠正质量检查(1)纠正控制点定位是否准确,分布是否均匀;(2)纠正控制点单点最大误差是否超限;(3)纠正控制点残差中误差是否超限;(4)纠正影像精度是否超限。