缓和曲线计算原理
- 格式:doc
- 大小:817.50 KB
- 文档页数:21
公路缓和曲线知识与计算公式未知2010-04-04 17:34:42 本站一、缓和曲线缓和曲线是设置在直线与圆曲线之间或大圆曲线与小圆曲线之间,由较大圆曲线向较小圆曲线过渡的线形 , 是道路平面线形要素之一。
1 .缓和曲线的作用1 )便于驾驶员操纵方向盘2 )乘客的舒适与稳定,减小离心力变化3 )满足超高、加宽缓和段的过渡,利于平稳行车4 )与圆曲线配合得当,增加线形美观2 .缓和曲线的性质为简便可作两个假定:一是汽车作匀速行驶;二是驾驶员操作方向盘作匀角速转动,即汽车的前轮转向角从直线上的 0 °均匀地增加到圆曲线上。
S=A2/ρ( A :与汽车有关的参数)ρ=C/s C=A2由上式可以看出,汽车行驶轨迹半径随其行驶距离递减,即轨迹线上任一点的半径与其离开轨迹线起点的距离成反比,此方程即回旋线方程。
3 .回旋线基本方程即用回旋线作为缓和曲线的数学模型。
令:ρ=R , l h=s 则 l h=A2/R4 .缓和曲线最小长度缓和曲线越长,其缓和效果就越好;但太长的缓和曲线也是没有必要的,因此这会给测设和施工带来不便。
缓和曲线的最小长度应按发挥其作用的要求来确定:1 )根据离心加速度变化率求缓和曲线最小长度为了保证乘客的舒适性,就需控制离心力的变化率。
a1=0,a2=v2/ ρ ,a s= Δ a/t ≤ 0.62 )依驾驶员操纵方向盘所需时间求缓和曲线长度 (t=3s)3 )根据超高附加纵坡不宜过陡来确定缓和曲线最小长度超高附加纵坡(即超高渐变率)是指在缓和曲线上设置超高缓和段后,因路基外侧由双向横坡逐渐变成单向超高横坡,所产生的附加纵坡。
4 )从视觉上应有平顺感的要求计算缓和曲线最小长度缓和曲线的起点和终点的切线角β最好在 3°—— 29°之间,视觉效果好。
《公路工程技术标准》规定:按行车速度来求缓和曲线最小长度,同时考虑行车时间和附加纵坡的要求。
5 .直角坐标及要素计算1 )回旋线切线角( 1 )缓和曲线上任意点的切线角缓和曲线上任一点的切线与该缓和曲线起点的切线所成夹角。
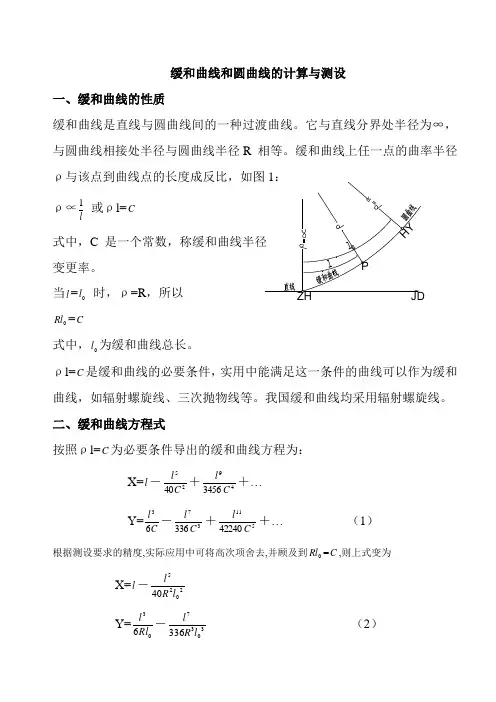
缓和曲线和圆曲线的计算与测设一、缓和曲线的性质缓和曲线是直线与圆曲线间的一种过渡曲线。
它与直线分界处半径为∞,与圆曲线相接处半径与圆曲线半径R 相等。
缓和曲线上任一点的曲率半径ρ∝l1 或ρl=C式中,C 变更率。
当l =0l 时,ρ=R ,所以0Rl =C式中,0l 为缓和曲线总长。
ρl=C 是缓和曲线的必要条件,实用中能满足这一条件的曲线可以作为缓和曲线,如辐射螺旋线、三次抛物线等。
我国缓和曲线均采用辐射螺旋线。
二、缓和曲线方程式按照ρl=C 为必要条件导出的缓和曲线方程为:X=l -2540C l +493456C l +…Y=Cl 63-37336C l +51142240C l + (1)根据测设要求的精度,实际应用中可将高次项舍去,并顾及到0Rl =C ,则上式变为X=l -202540l R lY=036Rl l -3037336l R l (2)式中,x 、y 为缓和曲线上任一点的直角坐标,坐标原点为直缓点(ZH )或缓直点(HZ );通过该点的缓和曲线切线为x 轴,如图2:l 为缓和曲线上任一点P 到ZH (或HZ )的曲线长;0l 为缓和曲线总长度。
当l =0l 时,x=x 0,y=y 0,代入式(2)得:X 0=0l -23040R lY 0=Rl 62-340336Rl (3)式中,x 0 、y 0 为缓圆点(HY )或圆缓点(YH )的坐标。
三、缓和曲线常数计算β0、δ0、m 、p 、 x 0、y 0 等称为缓和曲线常数。
其物理意义及几何关系由下图,图3可得知:β0——缓和曲线的切线角,即HY (或YH )点的切线与ZH (或HZ )点切线的交角;亦即圆曲线一端延长部分所对应的圆心角。
δ0——缓和曲线的总偏角;m —切垂距,即ZH (或HZ )到由圆心O 向切线所作垂线垂足的距离; p —圆曲线内移量,为垂线长与圆曲线半径R 之差。
常数计算公式如下:X 0=0l -23040R lY 0=Rl 62-340336Rlβ0=π18020R lδ0=031β=π 18060R lm=2l -230240R lp=24R l 20-3402688Rl ≈24Rl 20 (4) 下面我们推证常数β0、δ0 、m 、p 、x 0、y 0。
11.2.1 带缓和曲线的圆曲线的测设为了保障车辆行驶安全,在直线与圆曲线之间加入一段半径由∞逐渐变化到R的曲线,这种曲线称为缓和曲线。
目前常用的缓和曲线多为螺旋线,它有一个特性,曲率半径ρ与曲线长度l成反比。
数学表达为:ρ∝1/l 或ρ·l = k ( k为常数)若缓和曲线长度为l0,与它相连的圆曲线半径为R,则有:ρ·l = R·l0 = k目前我国公路采用k = 0.035V3(V为车速,单位为km/h),铁路采用k = 0.09808V3,则公路缓和曲线的长度为l0 = 0.035V3/R ,铁路缓和曲线的长度为:l0 = 0.09808V3/R 。
11.2.2 带缓和曲线的圆曲线的主点及主元素的计算带缓和曲线的圆曲线的主点有直缓点ZH、缓圆点HY、曲中点QZ、圆缓点YH、缓直点HZ 。
带缓和曲线的圆曲线的主元素及计算公式:切线长 T h = q+(R+p)·tan(α/2)曲线长 L h = 2l0+R·(α-2β0)·π/180°外矢距 E h = (R+p)·sec(α/2)-R切线加长 q = l0/2-l03/(240R2)圆曲线相对切线内移量 p = l02/(24R)切曲差 D h = 2T h -L h式中:α 为线路转向角;β0为缓和曲线角;其中q、p、β0缓和曲线参数。
11.2.3 缓和曲线参数推导dβ = dl/ρ = l/k·dl两边分别积分,得:β= l2/(2k) = l/(2ρ)当ρ = R时,则β =β0β0 = l0/(2R)若选用点为ZH原点,切线方向为X轴,垂直切线的方向为Y轴,建立坐标系,则:dx = dl·cosβ = cos[l2/(2k)]·dldy = dl·sinβ = si n[l2/(2k)]·dl考虑β很小,sinβ和cosβ即sin(l2/(2k))和cos(l2/(2k))可以用级数展开,等式两边分别积分,并把k = R·l0代入,得以曲线长度l为参数的缓和曲线方程式:X = l-l5/(40R2l02)+……Y = l3/(6Rl0)+……通常应用上式时,只取前一、二项,即:X = l-l5/(40R2l02)Y = l3/(6Rl0)另外,由图可知,q = X HY-R·sinβ0p = Y HY-R(1-cosβ0)以β0= l0/(2R)代入,并对sin[l0/(2R)]、cos[l0/(2R)]进行级数展开,取前一、二项整理可得:q = l0/2-l03/(240R2)p = l02/(24R)若仍用上述坐标系,对于圆曲线上任意一点i,则i点的坐标X i、Y i可以表示为:Xi = R·sinψi+qYi = R·(1-cosψi)+p11.2.4 带缓和曲线的圆曲线的主点桩号计算及检核ZH桩号 = JD桩号-T hHY桩号 = ZH桩号+l0QZ桩号 = HY桩号+L/2YH桩号 = QZ桩号+L/2 = HY桩号+L = ZH桩号+l0+LHZ桩号 = YH桩号+l0 = ZH桩号+L hJD桩号 = ZY桩号-T h+D h(检核)11.2.5 带缓和曲线的圆曲线的主点的测设过程:(1)在JD点安置经纬仪(对中、整平),用盘左瞄准直圆方向,将水平度盘的读数配到0°00′00″,在此方向量取T h,定出ZH点;(2)从JD沿切线方向量取T h-X HY,然后再从此点沿切线垂直方向量取Y HY , 定出HY点;(3)倒转望远镜,转动照准部到度盘读数为α,量取T h,定出HZ点;(4)从JD沿切线方向量取T h-X HY,然后再从此点沿切线垂直方向量取Y HY , 定出YH点;(5)继续转动照准部到度盘读数为(α+180°)/2,量取E h,定出QZ点。
程序使用说明Fx9750、9860系列程序包含内容介绍:程序共有24个,分别是:1、0XZJSCX2、1QXJSFY3、2GCJSFY4、3ZDJSFY5、4ZDGCJS6、5SPJSFY7、5ZDSPFY8、5ZXSPFY9、6ZPJSFY 10、7ZBZFS 11、8JLHFJH 12、9DBXMJJS13、9DXPCJS 14、9SZPCJS 15、GC-PQX 16、GC-SQX17、PQX-FS 18、PQX-ZS 19、ZD-FS 20、ZD-PQX21、ZD-SQX 22、ZD-ZS 23、ZDSP-SJK 24、ZXSP-SJK其中,程序2-14为主程序,程序15-24为子程序。
每个主程序都可以单独运算并得到结果,子程序不能单独运行,它是配合主程序运行所必需的程序。
刷坡数据库未采用串列,因为知道了窍门,数据库看起很多,其实很少。
程序1为调度2-8程序;程序2为交点法主线路(含不对称曲线)中边桩坐标正反计算及极坐标放样程序;程序3为主线路中边桩高程计算及路基抄平程序;程序4为线元法匝道中边桩坐标正反计算及极坐标放样程序;程序5为匝道线路中边桩高程计算及路基抄平程序;程序6为任意线型开口线及填筑边线计算放样程序;程序7专为主线路开口线及填筑边线计算放样程序,只需测量任意一点三维数据,即可马上计算出该点相对于中桩法线上的偏移量;程序8专为匝道线路开口线及填筑边线计算放样程序,只需测量任意一点三维数据,即可马上计算出该点相对于中桩法线上的偏移量;程序9为桥台锥坡计算放样程序;程序10为计算两点间的坐标正反算程序;程序11为距离后方交会计算测站坐标程序;程序12为任意多边形面积周长计算程序;程序13为导线近似平差计算程序;程序14为水准近似平差计算程序;程序2-8所用数据库采用的串列,匝道用的File 1;主线用的File 2。
第一步:先用Excel按照文字说明输入完整条线路对应数据;第二步:保存为CSV格式,然后设置单元格格式、数字格式、科学计数、小数位数设置10位以上并保存;第三步:用FA-124导入,匝道数据列表文件选择“File 1”,主线数据列表文件选择“File 2”。
1.2道路线形的基本介绍道路运输在整个国民经济生活中起着重要作用。
道路的新建和改建,测量工作必须先行,所以公路施工测量所承担的任务也是非常大的,为了更好的进行道路施工工作,下面就道路线形进行一下简单的介绍。
一般所说的路线,是指道路中线的空间位置。
中线在水平面上的投影称作路线的平面;沿中线竖直剖切再行展开则是路线的纵断面;中线上任一点法向切面是道路在该点的横断面。
无论是铁路、公路还是地铁隧道和轻轨,由于受到地形、地物、地质及其他因素的限制,经常要改变线路前进的方向。
当线路方向改变时,在转向处需用曲线将两直线连接起来。
因此,线路工程总是由直线和曲线所组成。
曲线按其线形可分为:圆曲线、缓和曲线、复曲线和竖曲线等。
公路中线应满足的几何条件是:线形连续平滑;线形曲率连续(中线上任一点不出现两个曲率值);线形曲率变化率连续(中线上任一点不出现两个曲率变化值)。
考虑上述几何条件,顾及计算与敷设方便,现代公路平面线形要素由直线、圆曲线和缓和曲线构成,称之为平面线形三要素。
其中缓和曲线的曲率半径是从∞逐渐变到圆曲线半径R 的变量。
在与直线连接处半径为∞,与圆曲线连接处半径为R ,曲线上任一点的曲率半径与该点至起点的曲线长成反比。
目前公路线形设计已开始使用非对称线形(成为非对称平曲线)设计,特别是在互通立交匝道和山区高速高速公路线形设计中,这种线形设计使用得较多。
非对称线形分为完全非对称线形和非对称非完整线形两种,所谓“完全非对称曲线”的含义就是第一缓和曲线和第二缓和曲线起点处(ZH 或HZ )的半径为∞,圆半径为R ,第一缓和曲线长1s l ,第二缓和曲线长为2s l ,12s s l l ≠。
所谓“非完整”的含义是第一缓和曲线和第二缓和曲线的半径不是∞,而是1R 、2R 。
而坐标法成为高速公路放样的主要方法,坐标法放样线路中线的这个操作过程中,最重要的一部就是计算线路放样点的坐标。
2 路线中桩坐标计算原理在实际工程中,线路的设计由专门的设计方完成,在线路完成设计得到审批后设计方便把所设计线路的线路要素(或者称为曲线要素)提供给施工方。
圆曲线带有缓和曲线的曲线元素计算原理圆曲线带有缓和曲线的曲线元素计算原理1、缓和曲线的概念汽车在直线上行驶时,离心力为零;在曲线上行驶,就会产生离心力,如果某路线的直线段与圆曲线直接连接时,汽车从直线进入圆曲线那一瞬间就会突然产生离心力,驶出圆曲线又立即消失。
同时驾驶员在直线进入圆曲线或回到直线时迅速改变行车方向,造成驾驶操纵紧张,因而造成行成不安全、乘客不舒适。
汽车在以高速进入较小半径圆曲线时,这种现象尤为明显。
为了缓和行车方向的突然变化及离心力的突然产生和消失,确保高速行车的安全和舒适,需要在直线段和圆曲线之间插入一段曲率半径由无穷大逐渐变化到圆曲线半径的过渡性曲线,这种曲线就叫做缓和曲线。
缓和曲线的作用是使汽车在不降低车速的情况下能均匀徐缓转向,由直线段逐渐过渡到圆曲线或曲圆曲线逐渐过渡到直线段,从而保证行车平稳、旅客舒适。
在设有超高和加宽时,缓和曲线也作为逐步超高及加宽的部分。
2、数学模型字母含义:(1)、曲线主要桩点名称简称汉语拼音缩写英语缩写交点交点JD IP转点转点ZD TP第一缓和曲线起点直缓点ZH TS第一缓和曲线终点缓圆点HY SC 曲线中点曲中点QZ MC第二缓和曲线起点圆缓点YH CS第二缓和曲线终点缓直点HZ ST(2)、曲线已知参数:R:圆曲线半径Ls:缓和曲线长度α:转向角(3)、曲线要素计算:β0:切线角(缓和曲线角);δ0:缓和曲线总偏角;b0:缓和曲线反偏角;P:内移值;q:切垂距(切线增值);T H:切线长;L H:曲线总长(两段缓和曲线+圆曲线的长度);Ly:圆曲线长度;E H:外矢距;D H:切曲差;X0:以ZH点或HZ点为坐标原点,ZH或HZ的切线为X轴,ZH 或HZ的法线方向为Y 轴,缓和曲线终点(HY点或YH点)的X坐标增量;Y0:以ZH点或HZ点为坐标原点,ZH或HZ的切线为X轴,ZH 或HZ的法线方向为Y轴,缓和曲线终点(HY点或YH点)的Y坐标增量;(4)、待求点字母含义:L:待求点至ZH点或HZ的曲线长度;:以ZH点或HZ点为坐标原点,ZH或HZ的切线为X轴,ZH或HZ的法线方向为Y 轴,待求点的X坐标增量;:以ZH点或HZ点为坐标原点,ZH或HZ的切线为X轴,ZH或HZ的法线方向为Y轴,待求点的Y坐标增量;二、缓和曲线公式1、基本公式如上图所示,缓和曲线的半径随着曲线长度的增大而成反比地均匀减小,即在缓和曲线上任一点的曲率半径ρ与曲线的长度L呈反比关系。
公路缓和曲线计算公式讲解公路缓和曲线是指在设计公路线形时为了使车辆在曲线上能够顺利转弯而采用的一种曲线形式。
在公路设计中,缓和曲线的设计是非常重要的,因为它直接关系到车辆在曲线上的安全行驶和舒适性。
在本文中,我们将对公路缓和曲线的计算公式进行详细的讲解,希望能够帮助大家更好地理解和应用这一知识。
一、缓和曲线的类型。
在公路设计中,常见的缓和曲线类型有三种,分别是圆曲线、过渡曲线和螺旋曲线。
圆曲线是一种由圆弧组成的曲线形式,它的曲率是恒定的。
过渡曲线是一种由直线段和圆弧段组成的曲线形式,它的曲率是逐渐变化的。
螺旋曲线是一种由圆弧和直线段交替组成的曲线形式,它的曲率也是逐渐变化的。
在实际的公路设计中,我们需要根据具体的情况选择合适的缓和曲线类型,以确保车辆在曲线上的安全行驶和舒适性。
二、缓和曲线的计算公式。
1. 圆曲线的计算公式。
在公路设计中,圆曲线的计算是非常常见的。
圆曲线的计算公式如下:L = (V^2) / (127R)。
其中,L表示圆曲线的长度(单位,米),V表示车辆的设计速度(单位,公里/小时),R表示圆曲线的半径(单位,米)。
根据这个公式,我们可以计算出圆曲线的长度,从而确定圆曲线的位置和形状。
2. 过渡曲线的计算公式。
过渡曲线是一种由直线段和圆弧段组成的曲线形式,它的计算公式如下:L = (V^2) / (a)。
其中,L表示过渡曲线的长度(单位,米),V表示车辆的设计速度(单位,公里/小时),a表示过渡曲线的加速度(单位,米/秒^2)。
根据这个公式,我们可以计算出过渡曲线的长度,从而确定过渡曲线的位置和形状。
3. 螺旋曲线的计算公式。
螺旋曲线是一种由圆弧和直线段交替组成的曲线形式,它的计算公式比较复杂。
螺旋曲线的计算需要考虑曲线的曲率变化和车辆的行驶轨迹,因此通常需要借助计算机软件来进行精确计算。
三、缓和曲线的设计原则。
在公路设计中,缓和曲线的设计需要遵循一些基本原则,以确保车辆在曲线上的安全行驶和舒适性。
缓和曲线半径计算公式缓和曲线是指将两条直线或曲线段平滑地连接起来的过渡曲线。
在道路设计、铁路设计等领域中广泛应用。
计算缓和曲线半径的公式基于几何学原理和交通工程的需求。
在计算缓和曲线半径之前,首先需要了解以下几个关键参数:1.设计速度(Vd):即车辆在缓和曲线上行驶的目标速度。
2.过渡长度(L):即缓和曲线的总长度。
3.动摩擦因数(f):即车辆行驶过程中的轮胎与路面之间的摩擦系数。
4.允许超高(e):在垂直方向上,车辆离开水平线的最大允许值。
基于以上参数,可以通过以下公式计算缓和曲线半径:R=Vd^2/(127*f*e)其中,R表示缓和曲线半径。
需要注意的几点是:1.这个公式是根据欧拉公式推导得来的,适用于大多数情况。
但对于特定道路设计,如复杂弯道或高速公路等,可能需要采用更复杂的公式进行计算。
2.设计速度需要根据具体路段的要求进行选择。
一般来说,缓和曲线的设计速度应与前后道路的设计速度相匹配,以确保平稳过渡。
3.允许超高是指驶过缓和曲线过程中,车辆会偏离水平线的程度。
允许超高的值应根据实际需要进行确定。
4.确定缓和曲线总长度的计算需要根据具体情况进行。
一般来说,它被设定为车辆达到设计速度所需的时间内行驶的距离。
5.动摩擦因数是一个经验值,根据道路状况、车辆类型等因素进行选择。
一般来说,可以参考交通工程相关规范或手册中的推荐值。
需要注意的是,以上计算仅为基本公式,实际应用中还会受到其他因素的影响,如地形、道路条件、车辆特性等。
因此,在进行具体的设计和计算时,建议参考相关的交通工程规范和设计手册,确保计算结果符合实际需求。
另外一种就是用回旋线(放射螺旋型)作为缓和曲线。
回旋线是一种曲率随曲线长度成比例变化的曲线,不仅可以使线形更加美观,而且与驾驶员匀速转动方向盘由圆曲线驶入直线或者由直线驶入圆曲线的轨迹线相符合。
其基本公式为:
rl=A2;
其中:r—回旋线上某点曲率半径(m);
l—回旋线上其点到原点的曲线长(m);
A—回旋线参数;
由于rl是长度的二次方,故令C=A2,A表征曲率变化的缓急程度,因此在缓和曲线上,r随l的变化而变化,在缓和曲线的终点处,l=L
s,r=R,RL s=A2,即
A=√(RL s);
其中:R—回旋线所连接的圆曲线半径;
L s—回旋线形的缓和曲线长度。
如图是缓和曲线敷设的基本图示,其几何元素的计算公式如下:
q =L s/2-L s3/(240×R2) (m);
p=L s2/(24R)-L s4/(2384×R3) (m
);
β=28.6479L s/R(。
);
T=(R+p)tan(α/2)+q(m);
L=(α-2β)πR/180+2Ls(m);
E=(R+p)/cos(α/2) -R(m);。
公路缓和曲线段原理及缓和曲线计算公式一、缓和曲线缓和曲线是设置在直线与圆曲线之间或大圆曲线与小圆曲线之间,由较大圆曲线向较小圆曲线过渡的线形,是道路平面线形要素之一。
1.缓和曲线的作用1)便于驾驶员操纵方向盘2)乘客的舒适与稳定,减小离心力变化3)满足超高、加宽缓和段的过渡,利于平稳行车4)与圆曲线配合得当,增加线形美观2.缓和曲线的性质为简便可作两个假定:一是汽车作匀速行驶;二是驾驶员操作方向盘作匀角速转动,即汽车的前轮转向角从直线上的0°均匀地增加到圆曲线上。
S=A2/ρ(A:与汽车有关的参数)ρ=C/sC=A2由上式可以看出,汽车行驶轨迹半径随其行驶距离递减,即轨迹线上任一点的半径与其离开轨迹线起点的距离成反比,此方程即回旋线方程。
3.回旋线基本方程即用回旋线作为缓和曲线的数学模型。
令:ρ=R,l h=s 则 l h=A2/R4.缓和曲线最小长度缓和曲线越长,其缓和效果就越好;但太长的缓和曲线也是没有必要的,因此这会给测设和施工带来不便。
缓和曲线的最小长度应按发挥其作用的要求来确定:1)根据离心加速度变化率求缓和曲线最小长度为了保证乘客的舒适性,就需控制离心力的变化率。
a1=0,a2=v2/ρ,a s=Δa/t≤0.62)依驾驶员操纵方向盘所需时间求缓和曲线长度(t=3s)3)根据超高附加纵坡不宜过陡来确定缓和曲线最小长度超高附加纵坡(即超高渐变率)是指在缓和曲线上设置超高缓和段后,因路基外侧由双向横坡逐渐变成单向超高横坡,所产生的附加纵坡。
4)从视觉上应有平顺感的要求计算缓和曲线最小长度缓和曲线的起点和终点的切线角β最好在3°——29°之间,视觉效果好。
《公路工程技术标准》规定:按行车速度来求缓和曲线最小长度,同时考虑行车时间和附加纵坡的要求。
5.直角坐标及要素计算1)回旋线切线角(1)缓和曲线上任意点的切线角缓和曲线上任一点的切线与该缓和曲线起点的切线所成夹角。
说明:线路平面由圆曲线、缓和曲线、直线三个线元组成,通过坐标反算里程及偏距是施工测量必不可少的一步。
其中较难处理是缓和曲线部分,现将缓和曲线反算里程及偏距的思路及原理写出来,与各位测量同仁一起探讨,不妥之处敬请斧正。
1.平面缓和曲线四种类型及其切垂距和偏距计算模型左入左出右入右出把以上左转曲线和右转曲线公式进行整理分析。
左转:入缓和曲线(X-P)*cos(-β)+(Y-Q)*sin(-β)→D(Y-Q)*cos(-β)-(X-P)*sin(-β)→C出缓和曲线(X-P)*cos(β)+(Y-Q)*sin(β)→D(Y-Q)*cos(β)-(X-P)*sin(β)→C右转:入缓和曲线(X-P)*cos(β)+(Y-Q)*sin(β)→D(Y-Q)*cos(β)-(X-P)*sin(β)→C出缓和曲线(X-P)*cos(-β)+(Y-Q)*sin(-β)→D(Y-Q)*cos(-β)-(X-P)*sin(-β)→C假设变量W为曲线方向判别符号,且规定W=1为右转,W=-1为左转,旋转角β=K,则以上公式简化为:入缓和曲线(X-P)×cos(W×K)+(Y-Q)×sin(W×K)→D(Y-Q)×cos(W×K)-(X-P)×sin(W×K)→C出缓和曲线(X-P)×cos(-W×K)+(Y-Q)×sin(-W×K)→D(Y-Q)×cos(-W×K)-(X-P)×sin(-W×K)→C2.趋近法求算缓和曲线里程及偏距(以上推导公式的应用)HHQX1 (计算入缓和曲线里程及偏距)程序清单:X:?Y:?W:(输入切线坐标和线路转向参数,1为左转,-1为右转X-S ZH→L:(测点对应缓和曲线长,估计值D O:S ZH+(L-L5÷(40×R2×l012)+ L9÷(3456×R4×l014))→P: W×(L3÷(6×R×l01)- L7÷(336×R3×l013))→Q:90×L2÷(π×R×l01)→K: (X-P)×cos(W×K)+(Y-Q)×sin(W×K)→D: (Y-Q)×cos(W×K)-(X-P)×sin(W×K)→C: L+D →L: LpWhile Abs(D)≥0.001: (循环语句。
缓和曲线长度计算公式
1缓和曲线(Horizontal Curve)
缓和曲线(Horizontal Curve)是指在道路曲线设计中,既要满足视距要求,又要满足最小转弯半径等安全要求的曲线。
它包括各种圆弧和椭圆曲线。
曲线体系是构成道路设计、规划和施工的重要一环,它能减少驾驶员的视距,同时能增加可用轨道宽度。
2缓和曲线长度计算
缓和曲线长度的计算可以用三种椭圆曲线公式来完成,即Purvisky贴合曲线(Purvisky tangent Curve)、Stull抛物线(Stull Parabolic Curve)和Camelback立体线(Camelback Vertical Curve)。
缓和曲线长度的计算并不是一个十分复杂的过程,可以按照以下几个步骤简单地计算:
(1)计算曲线横坡。
主要参数含义分别为曲线中心角、曲线中心距、曲线转角以及曲线上两端的交叉距离;
(2)根据横坡、曲线中心角和交叉距离,通过上述三种不同的椭圆公式来计算曲线长度。
(3)计算曲线长度时,若范围较大,需要将曲线分成多段,重复(2)步骤对每一段曲线分别计算,最后累加结果和得出最终的缓和曲线长度。
3总结
缓和曲线(Horizontal Curve)是道路曲线设计中重要的一环,能达到视距要求和最小转弯半径安全要求,它包括各种圆弧和椭圆曲线。
由于椭圆曲线的复杂性,缓和曲线长度的计算并不是一个复杂的过程,通常应该按照横坡、曲线中心角和交叉距离等参数来进行,再通过Purvisky贴合曲线、Stull抛物线和Camelback立体线三种不同的椭圆公式来实现。
缓和曲线计算公式的推导对于搞公路铁路工程的人来说,缓和曲线并不陌生,它是在直线和圆曲线之间的一段过渡曲线,其目的是使曲线的曲率半径连续变化,从而使车辆的向心加速度变化连续,降低旅客由车辆转弯引起的不适感。
缓和曲线类型有回旋线、三次抛物线、Bloss曲线、正弦一波型、半波正弦型等曲线。
而在我国回旋线被广泛采用,故本文详细介绍回旋线作为缓和曲线的计算方法,顺便讲一点有趣的历史。
一、回旋线的定义回旋线(clothoid)又称为欧拉螺旋线(Euler spiral)、羊角螺旋(Cornu spirals),菲涅尔螺旋(Fresnel spirals)、辐射螺旋线(Radiation helix),它被定义为:线上任意点的曲率半径与该点到坐标原点的曲线长成反比的曲线。
二、为什么需要缓和曲线回旋线最重要的性质—曲率随弧长线性变化回旋线的曲率是随弧长线性变化的,这也是它能作为缓和曲线的原因,下面将给出证明。
三、预备一些数学背景知识1、任意曲线的弧长微分公式推导如图所示,笛卡尔坐标系下,在曲线上任取一段弧微元ds,当ds足够小时,可认为弧线和弦线相等,则有:ⅆs=√(ⅆx)2+(ⅆy)2而ⅆy=y′ⅆx,则有:ⅆs=√(ⅆx)2+(y′ⅆx)2=√1+(y′)2ⅆx特别的,当曲线为参数方程形式时x=f(t)y=g(t)ⅆs=√f′2(t)+g′2(t)ⅆt2、任意曲线的曲率公式曲线的曲率(curvature)是单位切向量对于弧长的旋转速度,也就是弧的切线偏转角与该弧长之比的绝对值,通过微分来定义,曲率表明曲线某一点附近的弯曲程度。
其表达式为:k=|ⅆθⅆs|式中:k表示曲率,ⅆθ表示曲线在该点处切线与x轴夹角的变化微元,也等于曲线在该点处的偏转角微元,ⅆs表示曲线的长度变化微元,加绝对值是为了保证曲率是正值。
下面将给出曲率求解过程:设曲线的方程为y =f (x ),且具有二阶导数,则曲线在点M 处的切线斜率为:y ′=tan θ则y ′′=ⅆ(tan θ)ⅆθⅆθⅆx =sec 2θⅆθⅆx 即ⅆθⅆx =y ′′1+tan 2θ=y ′′1+y ′2又ⅆs =√1+(y ′)2ⅆx ,故y =f (x )在点M 处的曲率为:k =|ⅆθⅆs| =|y ′′1+y′2ⅆx √1+y ′2ⅆx|=|y ′′(1+y ′2)32|这就是曲率方程的一般形式,特别地,当曲线为参数方程形式时x =f (t )y =g (t )k =|f ′(t )g ′′(t )−g ′(t )f ′′(t )(f ′2(t )+g ′2(t ))32|三、回旋线方程的推导我们从回旋线的定义可以得到它的重要性质,即曲线上任意点的曲率半径与该点到坐标原点的曲线长成反比。
圆曲线带有缓和曲线的曲线元素计算原理1、缓和曲线的概念汽车在直线上行驶时,离心力为零;在曲线上行驶,就会产生离心力,如果某路线的直线段与圆曲线直接连接时,汽车从直线进入圆曲线那一瞬间就会突然产生离心力,驶出圆曲线又立即消失。
同时驾驶员在直线进入圆曲线或回到直线时迅速改变行车方向,造成驾驶操纵紧张,因而造成行成不安全、乘客不舒适。
汽车在以高速进入较小半径圆曲线时,这种现象尤为明显。
为了缓和行车方向的突然变化及离心力的突然产生和消失,确保高速行车的安全和舒适,需要在直线段和圆曲线之间插入一段曲率半径由无穷大逐渐变化到圆曲线半径的过渡性曲线,这种曲线就叫做缓和曲线。
缓和曲线的作用是使汽车在不降低车速的情况下能均匀徐缓转向,由直线段逐渐过渡到圆曲线或曲圆曲线逐渐过渡到直线段,从而保证行车平稳、旅客舒适。
在设有超高和加宽时,缓和曲线也作为逐步超高及加宽的部分。
2、数学模型字母含义:(1)、曲线主要桩点名称简称汉语拼音缩写英语缩写交点交点JD IP转点转点ZD TP第一缓和曲线起点直缓点ZH TS第一缓和曲线终点缓圆点HY SC 曲线中点曲中点QZ MC第二缓和曲线起点圆缓点YH CS第二缓和曲线终点缓直点HZ ST(2)、曲线已知参数:R:圆曲线半径Ls:缓和曲线长度α:转向角(3)、曲线要素计算:β0:切线角(缓和曲线角);δ0:缓和曲线总偏角;b0:缓和曲线反偏角;P:内移值;q:切垂距(切线增值);T H:切线长;L H:曲线总长(两段缓和曲线+圆曲线的长度);Ly:圆曲线长度;E H:外矢距;D H:切曲差;X0:以ZH点或HZ点为坐标原点,ZH或HZ的切线为X轴,ZH或HZ的法线方向为Y 轴,缓和曲线终点(HY点或YH点)的X坐标增量;Y0:以ZH点或HZ点为坐标原点,ZH或HZ的切线为X轴,ZH或HZ的法线方向为Y轴,缓和曲线终点(HY点或YH点)的Y坐标增量;(4)、待求点字母含义:L:待求点至ZH点或HZ的曲线长度;:以ZH点或HZ点为坐标原点,ZH或HZ的切线为X轴,ZH或HZ的法线方向为Y 轴,待求点的X坐标增量;:以ZH点或HZ点为坐标原点,ZH或HZ的切线为X轴,ZH或HZ的法线方向为Y轴,待求点的Y坐标增量;二、缓和曲线公式1、基本公式如上图所示,缓和曲线的半径随着曲线长度的增大而成反比地均匀减小,即在缓和曲线上任一点的曲率半径ρ与曲线的长度L呈反比关系。
1.2道路线形的基本介绍道路运输在整个国民经济生活中起着重要作用。
道路的新建和改建,测量工作必须先行,所以公路施工测量所承担的任务也是非常大的,为了更好的进行道路施工工作,下面就道路线形进行一下简单的介绍。
一般所说的路线,是指道路中线的空间位置。
中线在水平面上的投影称作路线的平面;沿中线竖直剖切再行展开则是路线的纵断面;中线上任一点法向切面是道路在该点的横断面。
无论是铁路、公路还是地铁隧道和轻轨,由于受到地形、地物、地质及其他因素的限制,经常要改变线路前进的方向。
当线路方向改变时,在转向处需用曲线将两直线连接起来。
因此,线路工程总是由直线和曲线所组成。
曲线按其线形可分为:圆曲线、缓和曲线、复曲线和竖曲线等。
公路中线应满足的几何条件是:线形连续平滑;线形曲率连续(中线上任一点不出现两个曲率值);线形曲率变化率连续(中线上任一点不出现两个曲率变化值)。
考虑上述几何条件,顾及计算与敷设方便,现代公路平面线形要素由直线、圆曲线和缓和曲线构成,称之为平面线形三要素。
其中缓和曲线的曲率半径是从∞逐渐变到圆曲线半径R的变量。
在与直线连接处半径为∞,与圆曲线连接处半径为R,曲线上任一点的曲率半径与该点至起点的曲线长成反比。
目前公路线形设计已开始使用非对称线形(成为非对称平曲线)设计,特别是在互通立交匝道和山区高速高速公路线形设计中,这种线形设计使用得较多。
非对称线形分为完全非对称线形和非对称非完整线形两种,所谓“完全非对称曲线”的含义就是第一缓和曲线和第二缓和曲线起点处(ZH或HZ)的半径为∞,圆半径为R,第一缓和曲线长1s l ,第二缓和曲线长为2s l ,12s s l l ≠。
所谓“非完整”的含义是第一缓和曲线和第二缓和曲线的半径不是∞,而是1R 、2R 。
而坐标法成为高速公路放样的主要方法,坐标法放样线路中线的这个操作过程中,最重要的一部就是计算线路放样点的坐标。
2 路线中桩坐标计算原理在实际工程中,线路的设计由专门的设计方完成,在线路完成设计得到审批后设计方便把所设计线路的线路要素(或者称为曲线要素)提供给施工方。
所提供的曲线要素一般包括:线路中各曲线段的起点坐标、起点里程、起点半径、终点坐标、终点里程、终点半径、交点坐标、曲线参数、转角(包括用一定的符号表示左右转)、两条切线长(起点与终点各所对应的两条切线)、曲线长。
当然不同的工程项目所提供的曲线要素也不一样,以上所述的要素是大多数设计方会提供的,有的设计方在提供上述要素的前提下,还提供曲线段的外距、中点坐标、弦长或者走向方位角等要素,供施工方在计算施工坐标时予以相互检核。
所以,为了保证原理的通用性,我们需要用最少的、最通用的、最有利于使用、最有利于推算的条件来讲解。
通过对多份实际工程中用到的曲线元素的分析,得出了计算最复杂曲线(非完整缓和曲线)的中、边桩坐标及中桩→边桩坐标方位角的最少条件。
中桩,指的是为表示中线位置和线形等,沿路线中线所设置的编有桩号的桩或标志。
中桩测设是指沿着直线或曲线详细测设中桩,是工程中放样测量的重要组成部分。
中桩的放样方法有多种,但随着测量仪器的日益先进,测量手段也开始发生变化且趋向于简单,测量的结果也日益精确,当然所要求的放样元素也由所变化。
现在工程中实际用到的放样仪器主要是全站仪、GPS-RTK ,这就决定我们在计算线路的放样元素时,得出的主要对象是桩位在总体坐标系中的二维坐标(高程放样是在其单独的高程坐标系中单独进行的)。
经过总结,发现进行中桩坐标计算时,无论其是何种曲线段只要给出下述条件即可进行相应的计算。
条件:线路中各曲线段的起点坐标1x 1y 、起点里程1s 、起点半径1r 、终点坐标2x 2y 、终点里程2s 、终点半径2r 、交点坐标3x 3y 、曲线参数A 、转向(-1或1)。
由于在圆曲线、完整缓和曲线段及非完整缓和曲线段中桩、边桩坐标计算过程中,需要先建立局部坐标系然后进行二维坐标之间的转换,所以下面首先对二维坐标系之间的转换进行讲解:2.1二维直角坐标系的转换两个直角坐标系(如右图)进行相互转换的旋转角称为欧勒角,对于二维直角坐标系两个坐标系之间的夹角大小等于其欧勒角。
对于二维直角坐标系已知P 点在局部坐标系中的坐标,()P P A B ,局部坐标系原点0,()x y 以及局部坐标系相对于总体坐标系的坐标方位角,则P 在总体坐标系中的坐标为:00cos sin sin cos p P P p x x A y y B θθθθ⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦- 将矩阵换算为方程式的形式为:00cos sin sin cos pppPPpx x A B yy A B θθθθ=+-⎫⎪⎬=++⎪⎭式中0x 0y 与θ值可由计算人员提供。
同样,若已知P 点在总体坐标系中的坐标,()P Px y ,可按下式将其换算为在局部坐标系中的坐标,()P PA B :00()()()()cos sin sin cos PPP PPP y y x x A y y x x B θθθθ⎫=-+-⎪⎬=--+-⎪⎭在前期的预备知识了解后,下面就工程中可能遇到的十一种路段,如何进行中桩坐B标的计算逐一的进行详细的讲解。
2.2直线段中桩坐标计算原理首先说清的一点是,直线段不具有交点坐标。
在进行中桩坐标计算时,首先根据起点坐标1x 1y 与终点坐标2x 2y 计算起点至终点的坐标方位角jdjz :2121arctany y jdjzx x-=-在得到计算起点至终点的坐标方位角jdjz 后,即可计算该直线段上任意里程s 的坐标,计算方式为:1111()()cos sin jdjz x x s s y y jdjzs s =+-=+- 这样,直线段的任意要求里程的中桩坐标就求出来了。
2.2圆曲线段中桩坐标计算原理现在的铁路公路为了顾及到车辆行驶的安全性,防止使驾驶员的产生视觉疲劳,经常布设圆曲线,圆曲线是一种比较简单的线形,但因圆曲线段的线路走向较直线段较为复杂,所以在计算中桩过程中,为了坐标的计算方便以及后续的坐标系转换,须建立单独的坐标系,首先在局部坐标中计算各个桩号的中桩坐标,然后再根据局部坐标系原点在全局坐标系中的坐标以及局部坐标系X 轴方向在全局坐标系中的坐标方位角进行坐标转换。
2.2.1 圆曲线段中桩坐标计算通用原理由于路线的转向不同,局部坐标系的建立方式也有所不同,这里先讲述圆曲线段中桩坐标计算的通用原理。
如右图所示,以曲线起点ZY 为坐标原点,以顺着线路方向的切线为X 轴,以切线的垂线方向为Y 轴,两个轴构成测量坐标系。
则该圆曲线段上任意里程的中桩在局部坐标系中的坐标为:sin 1cos 180R x y R S R Rϕϕϕ=⎡⎤=⎣⎦⋅-=o式中s 为曲线段距离,即曲线段桩号差值。
在计算出桩位在局部坐标系中的坐标后,就必须进行坐标系之间的转换:00cos sin sin cos pppPPpx x A B yy A B θθθθ=+-⎫⎪⎬=++⎪⎭这里叙述的两个轴的定义只是为了叙述原理方便所定义的,并不代表全部情况,随着线路转向不同的而不同,当然x ,y 的计算公式也因坐标系的不同而不同,实际线路计算时需灵活处理。
同时顾及坐标计算的方便以及后续坐标系的转换,这里建议在建立坐标系时建立测量坐标系而不是数学坐标系。
2.2.1 圆曲线段左、右转的处理方式圆曲线段之所以要讨论左、右转的问题,主要是顾及到在局部坐标系中的坐标保证是正值,同时保证为了后期的坐标转换的方便,很容易通过图形来表示:通过我们也可以很容易的总结出桩位在各自的局部坐标系中的坐标,中()式为线路左转时的局部坐标的计算公式,()式为线路右转时的局部坐标的计算公式:sin 1cos 180R x y R S R R ϕϕϕ=⎡⎤=⎣⎦⋅-=osin 1cos 180R x y R S R Rϕϕϕ=⎡⎤=⎣⎦⋅-=o无论线路是左转还是右转,在计算完桩位在局部坐标系中坐标后都需要进行坐标系的转换,公式不再赘述,公式中的各个量得含义也不变。
2.3完整缓和曲线段中桩坐标计算原理直线的半径为无穷大;进入圆曲线时,则半径为R ,所以从直线段过渡到圆曲线时,汽车的行驶曲率半径是不断变化,这一变化路段即为缓和曲线段。
2.3.1 完整缓和曲线段中桩坐标计算通用原理由于缓和曲线段没有统一的曲率半径,所以计算桩位坐标的过程是比较困难比较繁琐的,所以为了坐标计算的方便以及后续的坐标系转换,也须建立单独的坐标系。
以下图为例建立坐标系,该坐标系的建立方式为:原点位于ZH ,X 轴过原点正向垂直于ZH →JD式中p lpp dl dy dl dx ββsin cos ==将cos β、sin β按级数展开:积分得:在计算出桩位在局部坐标系中的坐标后,就必须进行坐标系之间的转换:00cos sin sin cos pppPPpx x A B yy A B θθθθ=+-⎫⎪⎬=++⎪⎭这里叙述的两个轴的定义只是为了叙述原理方便所定义的,并不代表全部情况,随着线路转向不同的而不同,当然x ,y 的计算公式也因坐标系的不同而不同,实际线路计算时需灵活处理。
同时顾及坐标计算的方便以及后续坐标系的转换,这里建议在建立坐标系时建立测量坐标系而不是数学坐标系,这样有利于坐标系的统一。
2.3.2 完整缓和曲线段不同过渡方式的左、右转的处理方式这里之所以要强调不同过渡方式的不同,是因为不同的过渡方式附带的不同转向所导致的坐标系的建立方式不同以及坐标计算公式不同,但坐标系建立的原则就是保证x 值与y 均保证为正值,方便后期的坐标转换。
现在就不同的过渡方式以及不同的转向进行逐一讨论:1.线路是由大半径过渡到校半径,转向是左转这里为了计算出的中桩坐标都是正值,而且为了后期的坐标系的转换的方便这里建议建立坐标系的方式为:原点位于QD(起点),X轴经过原点正向垂直于ZH→JD切线的方向,Y轴经过过原点正向指向与于ZH→JD切线的方向一致。
这样各个桩位在局部坐标系总的值为:式中l为所求桩位距离QD的曲线长即为里程差,0l为完整的缓和曲线长度,R为终点半径。
P2.线路是由大半径过渡到校半径,转向是右转这里建议建立坐标系的方式为:原点位于QD(起点),X轴经过原点正向指向ZH →JD切线的方向,Y轴经过过原点正向垂直于ZH→JD切线方向,构成测量坐标系。
这样各个桩位在局部坐标系总的值为:式中各字母的含义与前面所述一样,在此不再赘述。
3.线路是由小半径过渡到大半径,转向是左转这里建议建立坐标系的方式为:原点位于ZD(终点),X轴经过原点正向指向ZD →JD切线的方向,Y轴经过原点正向垂直于ZD→JD切线方向,构成测量坐标系。