平面关节型机械手设计二
- 格式:pdf
- 大小:262.57 KB
- 文档页数:11
总体方案设计根据课题设计任务书的要求,确定总体方案:1.抓重:10kg2.坐标形式:圆柱坐标3.自由度:3定为方式:机械挡块(行程开关)。
驱动方式:液压驱动。
控制方式:PLC(可编程序控制)定位精度:±2mm。
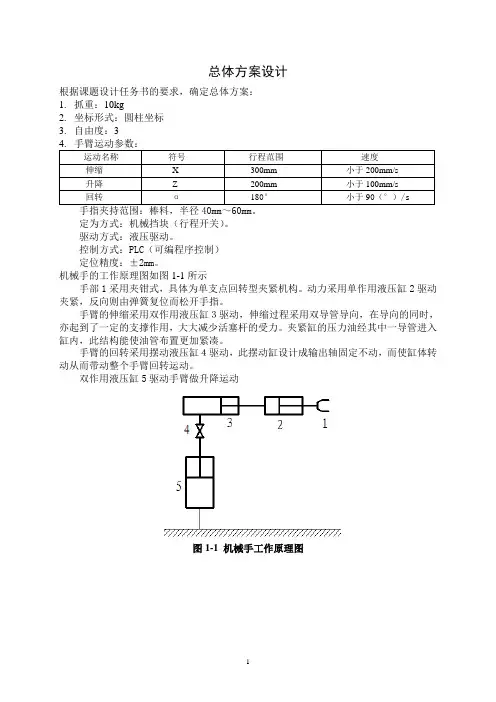
机械手的工作原理图如图1-1所示手部1采用夹钳式,具体为单支点回转型夹紧机构。
动力采用单作用液压缸2驱动夹紧,反向则由弹簧复位而松开手指。
手臂的伸缩采用双作用液压缸3驱动,伸缩过程采用双导管导向,在导向的同时,亦起到了一定的支撑作用,大大减少活塞杆的受力。
夹紧缸的压力油经其中一导管进入缸内,此结构能使油管布置更加紧凑。
手臂的回转采用摆动液压缸4驱动,此摆动缸设计成输出轴固定不动,而使缸体转动从而带动整个手臂回转运动。
双作用液压缸5驱动手臂做升降运动图1-1 机械手工作原理图手部设计手部(亦称抓取机构)是用来直接握持工件的部件,由于被握持工件的形状、尺寸大小、重量、材料性能、表面处理等的不同,则机械手的手部机构是多种多样的,大部分的手部结构是根据特定的工件要求而设计的(林建龙,王小北,2003)。
常用的手部,按其握持工件的原理,大致可分成夹持式和吸附式两大类。
本设计采用常用的夹钳式手部结构,它是最常见的夹持式结构。
夹钳式手部是由手指、传动机构和驱动装置三部分组成的,它对抓取各种形状的工件具有较大的适应性,可以抓取轴、盘和套类零件(殷际英,何广平,2003)。
一般情况下多采用两个手指,少数采用三指或多指。
本设计中的工件是棒料,所以选择较简单的两指结构。
夹钳式手部设计的基本要求:1、应具有适当的夹紧力和驱动力手指握力(夹紧力)大小要合适,力量过大则动力消耗多,结构庞大,不经济,甚至会损坏工件;力量过小则夹持不住或产生松动、脱落。
在确定握力时,除考虑工件总量外,还应考虑传送或操作过程中所产生的惯性力和振动,亦保证工件夹持安全可靠(杨永清等,2008)。
对于手部的驱动装置来说,应有足够的驱动力。
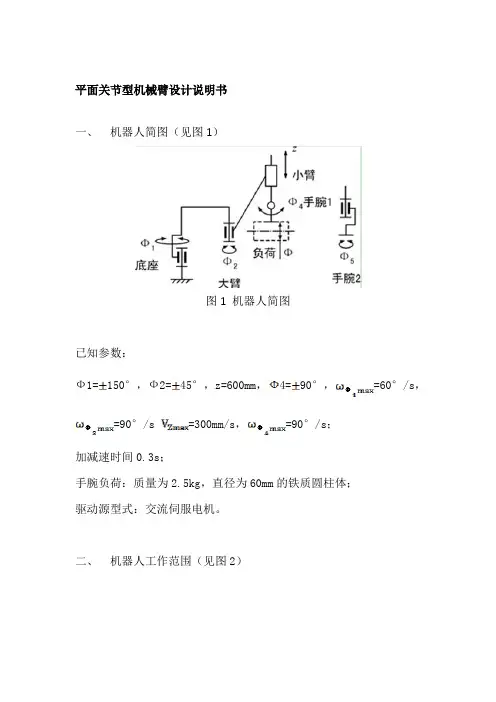
平面关节型机械臂设计说明书一、机器人简图(见图1)图1 机器人简图已知参数:Ф1=150°,Ф2=45°,z=600mm,4=90°,=60°/s,=90°/s =300mm/s,=90°/s;加减速时间0.3s;手腕负荷:质量为2.5kg,直径为60mm的铁质圆柱体;驱动源型式:交流伺服电机。
二、机器人工作范围(见图2)图2 机器人工作范围三、运动简图(见图3)图3 机器人运动简图该平面关节型机器人有以下几种运动结构形式:腰座转动机构: 布置在基座上的腰座安装在角接触球轴承上,电动机M1的轴与谐波发生器的中心轮连接,谐波发生器的刚轮与腰座固定部分联结,而谐波发生器的柔轮则与腰座的输出部分联接,当电机M1转动时带动腰座实现回转运动。
手臂转动机构: 布置在腰座上的大臂安装在角接触球轴承上,电动机M2的轴与谐波发生器的中心轮连接,谐波发生器的刚轮与大臂固定部分联结,而谐波发生器的柔轮则与大臂的输出部分联接,当电机M2转动时带动大臂实现回转运动。
手臂举升机构: 包括手腕机构在内的机体沿固定在上、下支承板中的两个导向柱可以上下移动。
在上支承板上装有电机基座,电机通过联轴器与滚珠丝杠相连,滚珠丝杠副的螺母紧固在手臂伸缩组件的机体上。
这样一来,电机M3的转动就变为手臂的上下往复移动。
手腕的俯仰及回转机构: 在手腕机构的机体前后装有电机M4及M5。
M4通过谐波减速器减速后,通过一组直齿齿轮及一组锥齿轮,将电机M4的转动变为手腕的俯仰运动。
电机M5经过谐波减速后,通过两组直齿齿轮传动,将电机M5的转动变为手腕的回转运动。
四、负载分析与结构设计计算1、腕部(见图4)图4 腕部传动简图传递路线:(1)关节4:电机M4—谐波减速器1—轴1—圆柱直齿轮Z1/Z2—轴5—带动手腕的回转运动Ф4(2)关节5:电机M5—谐波减速器2—轴2—圆柱直齿轮Z3/Z4—轴4—带动手腕上下俯仰运动Ф5A、由手腕负载求腕部驱动力矩:已知:手腕负载为M1=2.5kg的铁质圆柱体,且H=D=60mm,已知铁的密度ρ=7300kg/m3则:解得:H=D=75.8mm而(N.m)其中系数的值0.83-0.91.求回转关节驱动力矩T4:设其回转轴D5=60mm,腕部质量m2与负载m1相同均为2.5kg,则:求得=0.18N.m其中f——静摩擦系数其中,——偏心距=0.12N.m其中——腕载对关节4回转轴转动惯量2.求俯仰关节驱动力矩T5:设其回转轴D4=20mm,腕部质量m3与负载m1相同均为2.5kg,则=0.15 N.m则B、初选电机其中:——关节电机的额定功率K——安全系数,K=1.2-2——负载最大角速度对回转关节4:对回转关节5:初选选取电机M4与M5相同,型号为:MSMA系列(小惯量),其主要参数为:r/min联接键的选择:根据电机轴径,选择:键315(GB1096-79)C、总传动比及各级传动比确定:对回转关节4:=200 (4.10)取对俯仰关节5:(4.11)取D、谐波减速器的选型:1号谐波减速器的型号为杯型谐波减速器:CS-25A-200 i=200 m=0.7kg 2号谐波减速器的型号为杯型谐波减速器:CS-25A-100 i=100 m=0.7kgE、齿轮的选择1.直齿圆柱齿轮Z1、Z2:主动齿轮Z2,转速n1=20r/min,传动比为1,齿轮传动功率100w,选Z1、Z2材料为45调质。
关节型机器人二指平动手爪的设计本文将介绍一种关节型机器人二指平动手爪的设计。
该手爪采用了平动机构和转动机构的结合,具有较高的抓取精度和稳定性。
本文将从机械手爪的工作原理、手爪的设计思路、制作过程等方面对该手爪进行详细介绍。
一、机械手爪的工作原理机械手爪的设计目标是能够将物品抓取并放置到指定的位置。
因此,机械手爪的设计必须考虑以下三个方面:机械手爪的抓取力、抓取精度和抓取范围。
为了满足以上要求,该手爪采用了平动机构和转动机构的结合,手爪有两个抓取指头,每个指头可以独立的伸展和收缩。
在实际操作中,机器人先是根据被取物品的大小和形状调整机械手爪的指头长度和间距,然后通过电机驱动机械手的指头向物体方向移动。
将指头与物品接触后,驱动手爪指头收缩,并施加一定的压力将物品抓住。
然后通过电机控制机械手爪的转动,把物品移动到指定位置,释放手爪,完成抓取和放置过程。
二、设计思路1.机械臂的选型这里我们选用六轴关节式机器人,因为关节型机器人可以自由的旋转和移动,且具有高度的灵活性,可以适应不同场合和任务的需求。
本文设计的机械手爪采用世界上最流行的夹持器机械构建方案---平动指夹,因为平动指夹结构简单,稳定性好,夹取的物品不易滑动。
而且,其自身的构成元件也有一定的标准化,使得机械手爪的制作更为方便。
3.机械手爪的结构设计该机械手爪结构设计简单,主要组成结构为基座、两个手指和手指收缩机构等。
手指采用平动结构设计,中央采用弹簧压板的形式对两个指头进行约束和稳固,同时保证了精度和稳定性。
手指的长度可以根据抓取物品的大小和形状进行调整,手指移动的方向可以通过电机控制,实现精准抓取的目的。
三、制作过程1. 机械手爪的制作材料本文设计的机械手爪使用2根异形铝杆,1个电机驱动装置,两个指夹部件,两个壳体,两个弹簧压板,一些紧固螺栓,1个主板等。
这些材料都可以在市面上购买到。
市场上的电机驱动装置品种齐全,大家可以根据实际情况和要求进行挑选。
![毕业设计(论文)-平面关节型机械手设计[管理资料]](https://uimg.taocdn.com/55aede4d960590c69fc37676.webp)
毕业设计说明书平面关节型机械手设计学生姓名学号系别专业班级指导教师填写日期平面关节型机械手设计摘要在现代工业中,生产过程的机械化,自动化已经成为突出主题。
在机械工业中,加工、装配等环节中运用的机械手已经越来越普遍。
它可降低工人的劳动强度,提高生产效率和质量。
平面关节型机械手采用两个回转关节和一个移动关节;两个回转关节控制前后左右运动,而移动关节则实现上下运动,其工作空间如工作空间图,它的纵截面为矩形的回转体,纵截面高为移动关节的行程长,两回转关节转角的大小决定回转体截面的大小、形状。
工业机械手是一种模仿人手部分动作,按照预先设定的程序,轨迹或其他要求,实现抓取、搬运工件或操作工具的自动化装置。
它在二十世纪五十年代就已用于生产,是在自动上下料机构的基础上发展起来的一种机械装置,开始主要用来实现自动上下料和搬运工件,完成单机自动化和生产线自动化,随着应用范围的不段扩大,现在用来夹持工具和完成一定的作业。
实践证明它可以代替人手的繁重劳动,减轻工人的劳动强度,改善劳动条件,提高劳动生产率。
关键字:机械手;轴承;气缸目录摘要 (I)前言 (1)第一章概论 (2)第一节机械手简史 (2)第二节机械手发展概况 (2)第三节机械手的发展趋势 (3)第四节机械手的组成、分类及型式 (4)上部分机械手的组成 (4)下部分机械手的分类及型式 (4)第五节机械手的应用及应用误区 (8)上部分机械手的应用 (8)下部分机械手应用误区 (9)第二章机械手工作原理及设计思想 (11)第三章机械手设计 (12)第一节手指设计 (13)第二节设计时要注意的问题 (13)第三节零件的设计 (13)第四节移动关节的设计 (16)第五节驱动方式的比较 (16)第六节气缸的设计 (17)第四章机械手臂部的设计及有关计算计 (18)第一节小臂的设计 (18)第二节设计时注意的问题 (18)第三节小臂结构的设计 (18)第四节轴的设计 (19)第五节轴承的选择 (19)第六节轴承摩擦力矩的设计 (20)第七节驱动选择 (21)第二部分大臂的设计计算 (22)第一节结构的设计 (22)第二节轴的设计计算 (22)第三节轴承的选择 (23)第四节轴承摩擦力矩的计算 (24)第五节伺服系统的选择 (24)第五章机身的设计 (25)小结 (26)参考文献 (27)致谢 (28)前言用于再现人手的的功能的技术装置称为。
江苏城市职业学院毕业设计(论文)( 2011 届)设计(论文)题目平面关节型机械手设计办学点(系)张家港办学点(工程系)专业机械设计与制造班级11机械(普)学号110404350532学生姓名邵强指导教师杜微娜职称助教摘要 (3)一、概论 (4)1、机械手的工作原理及设计思想 (4)2、机械手应用及应用中容易出现的误区 (5)3、机械手的发展及发展前景 (6)二、机械手的总体设计 (7)三、手指设计 (9)1、设计时应注意的问题 (10)2、零件的计算 (10)3、手指夹紧力的计算 (11)四、移动关节的设计计算 (12)1、驱动方式的比较 (12)2、汽缸的设计 (13)五、小臂的设计 (14)1、结构的设计 (14)2、轴的设计计算 (15)3、轴承摩擦力矩的计算 (15)4、驱动的选择 (16)六、大臂的设计 (16)1、结构的设计 (17)2、轴的设计计算 (17)3、轴承摩擦力矩的计算 (18)4、伺服系统的选择 (18)七、机身的设计 (17)1、设计时应注意的问题 (17)2、设计的效果说明 (18)结论 (20)致谢 (21)参考文献 (22)平面关节型机械手设计[摘要] 平面关节型机械手采用两个回转关节和一个移动关节;两个回转关节控制前后左右运动,而移动关节则实现上下运动,其工作空间如工作空间图,它的纵截面为矩形的回转体,纵截面高为移动关节的行程长,两回转关节转角的大小决定回转体截面的大小、形状。
关键词: 机械手轴承汽缸[Abstract] Selective Compliance Assembly Robot Arm have two slew joints andone move joints , two slew joints control the moving of the front and back l eft and right . the move joints control the moving of up and down . the wor k room as work room drawing . the vertical section is a rectangle slew . the high of the vertical section is move joints’journey ,the move angle of the two slew joints decide the big and small and figure of the vertical section .Key words: manipulator axletree cylinder一、机械手概论工业机械手是一种模仿人手部分动作,按照预先设定的程序,轨迹或其他要求,实现抓取、搬运工件或操作工具的自动化装置。
平面关节式教学机器人设计毕业设计中文摘要本次设计的课题为平面关节式教学机器人,通过对平面关节式教学机器人的开发设计,为我学院选修课《机械手与机器人》提供一个可以直观感受关节坐标式机器人的教学工具,该设计完成后经过进一步的试验设计可以实现该课程的实践教学,丰富该课程的教学手段、提高教学水平。
本文主要对平面关节式机器人的结构进行了优化设计,包括机器人的底座、轴、大臂、小臂等零件进行了更加细致的设计,减轻了各个零件的质量,使结构尺寸设计的更加合理,对零件的各个部分进行了更加细致的分析和设计,同时考虑了实际装配的一些问题,对零件进行了合理的工艺处理,对需要配合的地方给出了合理的配合,使结构更加符合教学机器人结构简单、价格便宜、操作方便等特点。
关键词机器人教学关节 SCARA毕业设计外文摘要目录1 引言 (1)1.1研究背景及现状 (1)1.2课题研究的意义 (2)1.3SCARA机器人本体结构 (2)2SCARA型机器人臂结构的设计 (4)2.1 电机的设计计算 (4)2.2轴的设计 (5)2.2.1轴的材料选择 (5)2.2.2估计轴的最小直径 (5)2.2.3 轴的结构设计 (5)2.2.4轴的校核 (8)2.3SCARA型机器人的底座机构关键零件的设计 (9)2.4 大臂的结构设计 (11)2.5小臂的结构设计 (12)2.6SCARA型机器人大臂与小臂连接处关节设计 (13)2.7电机托设计 (14)2.8SCARA型机器人手腕的设计 (16)2.8.1 滚珠丝杠花键轴的选择 (18)2.8.2 同步带的选择 (21)3平面关节式教学机器人的总体装配图 (23)4润滑 (24)结束语 (25)致谢 (26)参考文献 (27)附录一设备使用说明书 (28)附录二三维装配图 (29)附录三外购件明细表 (30)1 引言SCARA机器人很类似人的手臂的运动,它包含肩关节、肘关节和腕关节来实现水平和垂直运动,在平面内进行定位和定向,是一种固定式的工业机器人。
摘要机械手,顾名思义,机械原件做成的像人手一样的器械,可替代人手完成一些大量重复、复杂、危险的工作。
机器手是由机械与电子相互结合产生的产品。
使用机械手的目的有以下几点:劳动生产率得到提升,使加工过程更先进,更高效,减轻人们劳动负担,改善人们的劳动环境等等。
按照要求可以进行自动化技术装备。
机械手可以代替手工进行工作,降低劳动消耗程度,改进在工作中所需的物质设备条件,提升单位时间制作产品的数量。
经常在工业生产中出现的频繁工件无法用手工来解决的困难时,那么机械手就可以完美替代人手进行工业生产劳动;而且,机械手的工作环境相当广泛,可以在高低温、放射性等有毒污染环境下工作,占据相当大的优势,所以机械手在工厂运作中占据着不可替代的作用。
本次课程设计基于机械设计原理,在了解了四自由度关节型机械手的基本信息后,介绍了其使用范围,按照设计原理和步骤设计了一台有着四自由度的关节型机械手。
机械手的发明极大地改善了工人的工作环境,简化了工人的工作内容,提高整体的生产劳动效率,是人类生产活动中有利的帮手。
本论文运用了机械手工作原理和设计、四自由度设计等各方面的专业知识,在设计四自由度的关节型机械手的过程中,结合已有的知识解决过程中的难题,并进行深入探讨,如何在已有的基础上融入自己的创意和想法,使机械手设计得更为简洁,实用性更强。
关键词:关节型机械手,机械设计,四自由度ABSTRACTThe manipulator, as the name implies, is a human-like device made of mechanical originals, which can replace a lot of repetitive, complicated and dangerous work. The robot is a product produced by the combination of machinery and electronics. The purpose of using the robot is as follows: the labor productivity is improved, the processing process is more advanced, more efficient, the labor burden is reduced, the working environment is improved, and the like. Automated technical equipment is available upon request. The robot can replace the manual work, reduce the labor consumption, improve the physical and equipment conditions required in the work, and increase the number of products produced per unit time. When the frequent occurrence of frequent workpieces in industrial production cannot be solved by hand, it is the most effective way to use the robot at this time; moreover, the robot can work under high and low temperature, radioactive and other toxic pollution environments, occupying considerable advantages. Therefore, the robot plays an irreplaceable role in the operation of the factory.This course design is based on the mechanical design principle. After understanding the basic information of the four-degree-of-freedom articulated manipulator, the scope of its use is introduced. An articulated manipulator with four degrees of freedom is designed according to the design principles and steps. The invention of the robot greatly improved the working environment of the workers, simplified the work content of the workers, and improved the overall production labor efficiency, which is a favorable helper in human production activities. This thesis uses the professional knowledge of the working principle , and in-depth discussion, How to integrate your own ideas and ideas on the existing basis, so that the robot is designed to be more concise and practical.Key Words: Articulated manipulator;Mechanical Design;Four degrees of freedom目录1 绪论 (1)1.1 引言 (1)1.2 设计目的 (2)1.3 关节机械手研究概况 (2)1.3.1 国外研究现状 (2)1.3.2国内研究现状 (3)1.4 关节型机械手构成机件的作用 (4)2 总体方案设计 (5)2.1 机械手工程概述 (5)2.2 工业机械手总体设计方案论述 (6)2.3 机械手机械传动原理 (7)2.4 机械手总体方案设计 (8)3手部设计计算 (9)3.1对手部设计的要求 (9)3.2拉紧装置 (10)3.3机械运动范围(速度) (12)3.4手部右腔流量 (12)3.5手部工作压强 (12)4 移动关节的设计计算 (12)4.1驱动方式的比较 (12)4.2汽缸的设计 (13)5小臂的设计 (16)5.1 小臂结构的设计要求 (16)5.2 小臂结构的设计 (16)5.3小臂电机及减速器选型 (16)5.4小臂的计算 (17)5.5 轴的设计计算 (18)5.6 轴承的选择 (18)5.7 轴承的校核 (18)5.8 计算轴承摩擦力矩: (19)5.9步进电动机和齿轮选择 (20)6 大臂的设计计算 (20)6.1大臂部结构设计的基本要求 (20)6.2 大臂的结构设计 (22)6.3 大臂电机及减速器选型 (22)6.4大臂的计算 (23)6.5 轴的设计计算 (24)6.6轴承的选择 (24)6.7 轴承摩擦力矩的计算 (25)6.8步进电动机和齿轮的选择 (25)7. 机身的设计 (27)8 电机选型有关参数计算 (27)8.1 相关参数的计算 (28)8.2 电机型号的选择 (30)总结与展望 (31)致谢 (32)参考文献 (33)1 绪论1.1 引言上世纪八十年代以来,我国的社会、经济、科学技术都取得了突飞猛进的进展,在科学技术这一领域,机器人学也在不断地发展与进步。

平面关节型机械手江苏城市职业技术学院毕业论文课题名称平面关节型机械手姓名王如鹏学号0733010221专业机电一体化班级07职机电(2)指导老师朱云开2011年12 月目录引言----------------------------------------------------------- 3 摘要----------------------------------------------------------- 6 第一章机械手总体设计-----------------------------------------71.1 主要技术参数-------------------------------------------- 71.2 结构特点图---------------------------------------------- 8第二章手指设计 ---------------------------------------------- 92.1 设计是要注意的问题-------------------------------------- 92.2 零件的计算---------------------------------------------- 102.3 手指抓紧力的计算---------------------------------------- 10第三章移动关节的设计计算----------------------------------- 12 3.1 驱动方式的比较 ----------------------------------------- 12 3.2 汽缸的设计---------------------------------------------- 12第四章小臂的设计------------------------------------------- 14 4.1设计时注意的问题---------------------------------------- 14 4.2 小臂结构的设计------------------------------------------ 15 4.3 轴的设计计算 ------------------------------------------- 16 4.4 轴承的选择 --------------------------------------------- 17 4.5 轴承摩擦力矩的计算 ------------------------------------- 18 4.6 驱动选择 ----------------------------------------------- 18第五章大臂的设计计算---------------------------------------- 195.1 大臂结构的设计------------------------------------------ 19 5.2 轴的设计计算 ------------------------------------------- 20 5.3 轴承的选择 --------------------------------------------- 21 5.4 轴承摩擦力矩的计算 ------------------------------------- 22 5.5 伺服系统的选择 ----------------------------------------- 22第六章机身的设计 ------------------------------------------ 23 6.1 设计时注意的问题---------------------------------------- 236.2 三个自由度 -------------------------------------------- 24毕业设计总结--------------------------------------------------- 25 参考文献------------------------------------------------------- 26引言平面关节型机械手是应用最广泛的机械手类型之一,既可以用于实际生产,又可以用于教学实验和科学研究。
毕业设计〔论文〕-关节型机械手设计〔全套图纸〕 .doc摘要本文设计的关节型机械手采用圆柱坐标式,能完成上料、翻转等功能。
此机械手主要由手爪、手腕、手臂和机身等局部组成,具有手腕回转、手臂伸缩、手臂升降和手臂回转4个自由度,能够满足一般的工业要求。
该机械手由电位器定位,实行点位控制,控制系统采用PLC可编程控制,具有良好的通用性和灵活性。
该机械手为液压驱动,4个自由度和手爪的夹紧都由液压缸驱动,在油路的布置和规划中结合机械制造的根底,不断使油路符合制造的可行性,而且将油路布置成空间结构,使机械手的结构更加简洁和紧凑。
关键字:关节型机械手圆柱坐标液压缸可编程控制全套CAD图纸,加153893706AbstractIn this paper, the design of the joint-type robot using cylindrical coordinates of type, can be completed on the expected, inversion and other functions. Mainly by the manipulator hand, wrist, arm and body parts, etc., with rotating wrists, arms stretching, arm movements and arm rotation four degrees of freedom, able to meet the general requirements of the industry.The manipulator by the potentiometer position, the implementation of the control points, the control system using PLC programmable control, has a good generality and flexibility.The manipulator for the hydraulic-driven, four degrees of freedom and the clamping gripper driven by the hydraulic cylinder in the circuit layout and planning based on the combination of machinery manufacturing, and continuously so that the feasibility of manufacturing in line with the circuit, but also circuit layout into a spatial structure, so that the structure of manipulator more concise and compact.Keywords: joint-type robot cylindrical coordinates hydraulic cylinders PLC.目录摘要 (i)Abstract ……………………………………………………………………………i i1 绪论 (1)1.1 研究目的及意义 (1)1.2 本课题研究内容 (2)2 机械手的总体设计 (3)2.1 工业机械手的组成 (3)执行机构 (3)驱动机构 (4)控制系统 (4)2.2 关节型机械手的主要技术参数 (4)2.3 圆柱坐标式机械手运动简图 (5)3关节型机械械系统设计 (6)3.1 手部 (6)夹紧力的计算 (6)夹紧缸驱动力计算 (7)两支点回转型手指的夹持误差分析与计算 (8)夹紧缸的计算 (10)3.2 腕部 (11)腕部设计的根本要求 (11)腕部回转力矩的计算 (12)手腕回转缸的设计计算 (14)3.3 臂部 (15)手臂伸缩液压缸 (15)手臂回转液压缸 (23)4 机械手的液压驱动系统 (27)4.1 程序控制机械手的液压系统 (27)4.2 液压系统 (27)各液压缸的换压回路 (27)调速方案 (28)减速缓冲回路 (29)4.3 液压系统的合成 (29)5 机械手的可编程控制 (31)5.1 输入输出触点的分配 (31)行程开关的分配 (31)手动按钮的分配 (31)输入输出继电器的分配 (32)5.2 外部接线图 (32)5.3 控制面板设计 (33)5.4 状态控制图 (34)5.5 梯形图 (35)结论…………………………………………………………………………………37致谢…………………………………………………………………………………38 参考文献……………………………………………………………………………391 绪论机械手是近几十年开展起来的一种高科技自动化生产设备。
平面多关节机械臂的机构设计与运动学分析一、引言机器人技术的迅猛发展,使得多关节机械臂在制造、物流等领域发挥着重要作用。
在过去的几十年里,平面多关节机械臂的机构设计与运动学分析一直是研究的热点。
本文将探讨平面多关节机械臂的机构设计原理和运动学分析方法。
二、机构设计原理当设计平面多关节机械臂时,关键是确定关节的类型和机械结构的连接方式。
常见的关节类型有旋转关节和平移关节。
旋转关节可以实现机械臂在平面内的转动,平移关节可以实现机械臂的伸缩运动。
而机械结构的连接方式包括刚性连接和柔性连接。
刚性连接可以提供更高的精度和稳定性,而柔性连接则可以使机械臂具有更好的柔韧性和适应性。
三、运动学分析方法机械臂的运动学分析是研究机械臂运动规律的重要方法。
在平面多关节机械臂中,可以采用连杆法进行运动学分析。
连杆法是基于连杆机构的原理,并结合空间向量的运算进行分析。
首先,确定机械臂的坐标系和关节角度的定义,然后利用连杆法建立起机械臂各个连杆之间的关系式,最后通过空间向量的运算求解出机械臂的位姿和速度。
四、机构设计与运动学分析的应用平面多关节机械臂的机构设计与运动学分析在很多领域都有广泛的应用。
例如,在制造业中,机械臂可以代替人工完成重复性、高强度的作业,提高生产效率和产品质量。
在物流领域,机械臂可以实现货物的搬运和分拣,提高物流效率。
在医疗领域,机械臂可以用于手术操作和康复训练,帮助提高医疗水平和治疗效果。
五、结论平面多关节机械臂的机构设计与运动学分析是机器人技术的重要组成部分。
通过合理的机构设计和准确的运动学分析,可以使机械臂具有更好的性能和适应性。
未来,随着机器人技术的不断发展,平面多关节机械臂将在更多领域得到应用和发展。
因此,进一步研究机构设计原理和运动学分析方法具有重要意义,能够推动机器人技术的发展进步。
摘要本说明书所设计的关节型机械手应用圆柱坐标式整体机构,能够实现夹取、安放、搬运棒形工件等功能。
这个机械手主要由手爪、手腕、手臂、腰部和机座等部分组成,主要的活动功能体现在整个机械手的四个自由度以及手爪的闭合。
其中四个自由度包括腰部的回转,腰部的升降,手臂的伸缩,手腕部的回转。
这个机械手的整体规模一般,适用于小巧型工业零件的抓取和搬运,如电子加工业等。
该机械手主要就是靠液压缸的油压变化来实现4个自由度和手爪的夹取。
在油路的布置和规划中应用了液压传动的原理以及机械制造的原理,使得油路能够更加的符合机械设计过程中的合理性和可靠性,安全性和经济性。
充分利用好机构的相互配合关系,合理布置零件间的空间结构,使本设计更加的合理完善。
关键字:关节型机械手圆柱坐标液压缸四自由度AbstractThis explanation is designed articulated robot application type cylindrical coordinates overall organization, to achieve gripping, put the rod work piece handling functions. The robot gripper mainly by the wrists, arms, waist and base and other components, the main event features embodied in the entire four degrees of freedom and the robot gripper closure. Four degrees of freedom, including rotation, waist lifting, telescopic arm, wrist rotation of the waist. The overall size of the robot is generally suitable for compact industrial parts crawl and handling, such as electronic processing industry.The robot is mainly by hydraulic cylinders to achieve change gripping four degrees of freedom and a gripper. In the oil circuit layout and planning of the application of the principles and the principles of hydraulic transmission machinery manufacturing, making the oil to be more in line with the mechanical design process rationality and reliability, safety and economy. Take full advantage of a good relationship with each other agencies, rational arrangement of space between the structural components, making the design more reasonable and perfect.Keywords: articulated manipulator cylindrical coordinates cylinder four degrees of freedom目录摘要 (1)目录 (3)1.1研究目的 (4)1.2 研究意义 (4)2 机械手的总体设计 (6)2.1 关节型机械手的组成 (6)2.1.1 执行机构 (9)2.1.2 驱动机构 (10)2.2 圆柱坐标式机械手运动简图 (10)3 关节型机械手机械系统设计 (11)3.1 手部 (11)3.1.1 夹紧力的计算 (11)3.1.2夹紧缸驱动力计算 (11)3.2 腕部 (12)3.2.1 腕部设计的基本要求 (12)3.2.2 腕部回转力矩的计算 (13)3.2.3 手腕回转缸的设计计算 (14)3.3 臂部 (14)3.3.1 手臂伸缩液压缸 (14)3.3.2手臂回转液压缸 (20)结论 (22)参考文献 (23)致谢 (24)+1 绪论机械手这几十年在中国已经发展起来成为一种高新技术自动化生产设备。
摘要平面关节型机械手采用两个回转关节和一个移动关节;两个回转关节控制前后左右运动,而移动关节则实现上下运动,它的纵截面为矩形的回转体,纵截面高为移动关节的行程长,两回转关节转角的大小决定回转体截面的大小、形状[11]。
能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。
它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
关键词:机械手,轴承,汽缸ABSTRACTSelective Compliance Assembly Robot Arm have two slew joints and one move joints ; two slew joints control the moving of the front and back left and right , the move joints control the moving of up and down , the vertical section is a rectangle slew , the high of the vertical section is move joints’ journey , the move angle of the two slew joints decide the big and small and figure of the vertical section .Mechanical hand, is also called from begins, auto hand can imitate the manpower and arm's certain holding function, with by presses the fixed routine to capture, the transporting thing 'OR' operation tool's automatic operation installment. It may replace person's strenuous labor to realize the production mechanization and the automation, can operate under the hostile environment protects the personal safety, thus widely applies in departments and so on machine manufacture, metallurgy, electron, light industry and atomic energy.Key words:manipulator, axletree , cylinder目录摘要 (I)ABSTRACT.................................................................................................... I I 第1章总体设计....................................................... 错误!未定义书签。
基于教学的关节型机械手的结构设计一、引言随着科技的发展和社会的进步,越来越多的教育机构和企业开始引入教学机器人来进行教学活动。
而关节型机械手作为一种重要的教学工具之一,在教学中发挥了重要作用。
本文将基于教学的目的和需求,对关节型机械手的结构进行设计。
二、关节型机械手的结构设计要求1.灵活性:关节型机械手应具备较高的灵活性,能够在不同的教学场景中完成各种动作。
它应该有足够的自由度,以适应各种姿势和动作。
2.精度:关节型机械手应具有较高的精度和控制能力,可以精准地完成各种动作。
它应该能够精确控制每个关节的位置和力度,以满足教学需求。
4.易操作性:关节型机械手的结构应简单明了,易于操作和控制。
教学者和学生应能够轻松地理解和掌握其使用方法,提高教学效果。
三、关节型机械手的结构设计方案基于以上要求,以下是一个可能的关节型机械手的结构设计方案:1.关节设计:机械手可采用类似于人的手臂的结构,由多个关节连接而成。
每个关节都应具备自由度,可以进行旋转和弯曲动作。
关节的设计应注重灵活性和精度,以满足不同教学需求。
2.手指设计:机械手的手指应具备完整的运动能力,包括握取、抓取和放置等动作。
手指的设计可参考人的手指结构,采用多个关节连接的方式,每个关节都可进行弯曲和伸展动作,实现不同的手指姿势。
3.控制系统设计:机械手的控制系统应具备较高的精度和灵敏度,能够准确地控制每个关节的位置和力度。
可以采用传感器来感知机械手的位置和力度,然后通过电子控制系统来进行控制。
控制系统应具备人机交互界面,方便教学者和学生进行操作和控制。
5.动力源设计:机械手可采用电动或气动等方式提供动力。
电动机驱动的机械手可以提供较高的精度和控制能力,适用于精细操作的教学需求。
气动机械手则具有较高的动力和速度,适用于较大力度的教学需求。
四、结论关节型机械手是一种重要的教学工具,合理的结构设计可以提高教学效果。
本文基于教学的目的和需求,提出了关节型机械手的结构设计方案。
毕业论文题目关节型工业机械手的结构设计学院机械工程学院专业机械工程及自动化班级机自0917班学生廉开发学号20090421170指导教师苏东宁二〇一三年六月三日摘要关于该关节型工业机械手的具体研究方法。
本次设计工作首先对实体安川机器人进行了细致的研究,了解了其内部的具体结构,安川机器人的结构可分为六个轴系,然后根据六个轴系对其内部结构进行分解,以便了解各个零件之间的配合,这样就对安川机器人有了大体的了解。
下面就进行尺寸的测量,尺寸的测量只需要测量一下大体的外观尺寸,而内部尺寸可根据零件的配合进行合理的设计。
然后,进行计算(包括电机功率的计算,轴的设计,齿轮的参数计算),接着可依据相关资料,选取恰当的电机。
最后,可根据实体与之前所掌握的知识对机械手的结构进行设计分析。
关键词:伺服电机、机械手抓、移动旋转。
ABSTRACTHere is about the research method of the industrial manipulator joints. The design work on the real first AnChuan robot has carried on the detailed research, understand the internal structure of concrete, AnChuan robot structure can be divided into six axis, and then according to the six axis of its internal structure decomposition, in order to understand the cooperation between the various parts of the, thus for AnChuan robot have roughly understanding. Below is the size of the measurement, the size of the measurement only need to measure the general appearance of the size, and the internal dimension can be reasonable according to the parts of the design. Then, computing (including motor power calculation, the design of the shaft, the gear parameter calculation), then can according to relevant data, select the appropriate machine. Finally, according to the entity and prior knowledge on the structure of the manipulator design analysis.Keywords:servo motor rotate, manipulator grabbing and moving.目录摘要 (I)ABSTRACT (II)1 前言 (1)1.1 机械手国内外发展现状 (1)1.2 多关节型工业机械手概述 (2)1.3 机械手组成与分类 (3)1.3.1机械手组成 (3)1.3.2机械手分类 (3)2机械手的设计方案 (5)2.1设计任务的提出 (5)2.2 机械手设计方案 (5)2.2 方案特点 (6)3.1 电机的选型 (7)3.1.1 初步估算机械手的质量 (7)3.1.2计算各个轴的转速及转矩 (8)3.1.3 计算电机功率 (10)3.2 锥齿轮设计 (10)3.2.1 齿轮精度、材料 (10)3.2.2 按齿面接触疲劳强度设计 (11)3.2.3 按齿根弯曲强度设计 (12)3.2.4 锥齿轮参数计算 (12)3.3 同步带轮的设计 (13)3.3.1 同步齿形带传动计算 (13)3.3.2 带轮几何尺寸的计算 (15)3.4 减速器的设计 (16)3.4.1 减速器减速比的计算 (16)3.4.2 减速器输出轴径的计算 (16)4 机械手各结构设计 (18)4.1 手爪结构的设计 (18)4.1.1 手爪的设计要求 (18)4.1.2 手爪的分类 (18)4.1.3 手部结构形式的确定 (18)4.2 手腕结构的设计 (18)4.2.1 手腕的设计要求 (19)4.2.2 手腕结构形式的确定 (19)4.3 手臂结构的设计 (19)4.3.1 手臂的设计要求 (19)4.3.2 手臂结构 (20)4.3.3 小臂结构形式的确定 (20)4.4 小臂后箱体的结构设计 (20)4.5 连接杆件的设计 (21)5 关键轴的校核 (22)5.1 腕部输入轴的结构 (22)5.2 轴的校核 (22)6 结论 (25)参考文献 (26)致谢 (27)1前言1.1机械手国内外发展现状1962年,美国机械铸造公司试制成一台数控试教机械手。