正流量与负流量
- 格式:docx
- 大小:18.70 KB
- 文档页数:2
正流量和负流量控制的区别正流量控制和负流量控制的区别在我们常见的挖掘机中,除了小松使用LS控制外,大部分都使用负流量控制。
近年来有部分的公司推出正流量控制,并且如此这般地说正流量有诸多好处,那么正流量真的有那么神吗?挖掘机上为了更有效地利用发动机的功率通常都采用恒功率变量泵,所谓的恒功率变量泵通俗一点说就是泵的压力与泵的流量的乘积是一个常数,如果这个数值大于发动机的功率时就会出现我们常说的憋车。
所以每个设计者就其设计思想来说,都必须是使整个液压系统的功率无限接近发动机的功率而又绝对不能大于发动机的功率。
挖掘机的恒功率控制在挖掘机的恒功率控制上分为两个部分:一是泵内部的功率控制:他是根据本泵的输出压力和他泵(另一个泵)的输出压力对泵的排量进行的控制,当压力升高时,泵的排量随之减小;当压力降低时,泵的排量随之增大;如果系统的压力低于先导压力时则引入先导压力对其排量进行控制.无论是对于正流量还是负流量,就此一部分而言,不管是从理论上还是从结构上都没有什么不同,也就是说在此部分没有什么正流量和负流量之分.这是液压泵恒功率控制的主体,在此不作讨论.二是外部信号对泵的功率的控制:这里说的外部信号是指先导操作系统,主压力系统,发动机系统等等等等一切与泵的功率控制有关的信息的综合.在负流量中是负压信号和其它信号的综合,在正流量中是正压信号和其它信号的综合.这两个其它信号也没有什么不同,关键就在于负压信号和正压信号的区别.我们知道,在挖掘机上,各执行元件的速度会随操作手柄的行程的变化而变化,液压系统会根据这种变化对其排量进行控制,负流量和正流量的区别就在于这种变化的信号采集位置的不同.什么是负流量控制系统?手柄行程越大,对应的二次先导压力也会越大,由二次先导压力控制的主阀芯的开启度也会越大, 与之对应, 主阀芯的开启度越大,主油路分向执行元件的油越多,执行元件的速度就会越快,通过中位流经负压信号发生装置的油越少,负压信号的压力值就会越小;反之如果手柄行程越小,对应的二次先导压力也会越小,由二次先导压力控制的主阀芯的开启度也会越小, 与之对应, 主阀芯的开启度越小,主油路分向执行元件的油越少,执行元件的速度就会越慢, 通过中位流经负压信号发生装置的油就越多,负压信号的压力值就会越大.液压泵根据负压信号的压力值的大小来对其排量进行控制.这就是负流量控制.他的信号采集点是主油路中主控制阀的出口处什么是正流量控制系统?正流量控制系统,是力士乐上世纪80年代的技术,主要特点是:操纵手柄的先导压力不仅控制换向阀,还用来调节油泵的排量。
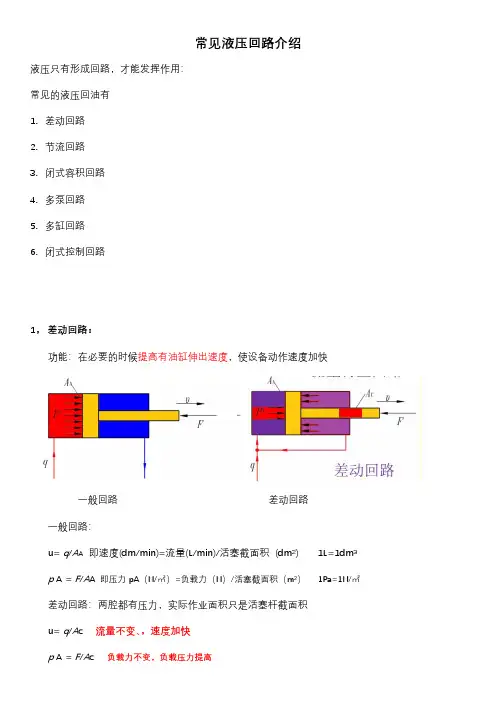
常见液压回路介绍液压只有形成回路,才能发挥作用: 常见的液压回油有 1. 差动回路 2. 节流回路 3. 闭式容积回路 4. 多泵回路 5. 多缸回路 6. 闭式控制回路1, 差动回路:功能:在必要的时候提高有油缸伸出速度,使设备动作速度加快一般回路 差动回路 一般回路:u= q /A A 即速度(dm/min)=流量(L/min)/活塞截面积 (dm²) 1L=1dm ³p A = F /A A 即压力pA (N/㎡)=负载力(N )/活塞截面积(m²) 1Pa=1N/㎡ 差动回路:两腔都有压力,实际作业面积只是活塞杆截面积 u= q /A C 流量不变、,速度加快p A = F /A C 负载力不变,负载压力提高2、节流回路功能:通过控制流量来控制油缸速度进口节流出口节流旁路节流2.1 进口节流通过调节进口节流口面积,控制进入油缸的流量,最终控制油缸速度;2-1-1 进口节流 2-1-2 能量消耗 2-1-3 进口节流(恒压)能量消耗:液压功率=压力×流量(压强每升高5Mpa,液压温度上升约3°)图2-1-2图2-1-3,进入油缸流量qA与压差开方成正比,为保持恒定压力,增加溢流阀,成本最低,但会产生新的能耗,多余流量从溢流阀流出qY=qP-qA 溢流阀作为恒压阀2-1-4 能量消耗图2-1-5 采用恒压泵 图2-1-6 采用流量调节阀为减少能量损耗,用恒压泵实时调节泵输出流量,使输出流量几乎全部进入油缸,如超出油缸所需,减小泵排量。
图2-1-5采用流量调节阀,通过调节节流孔大小,实时控制压差,控制进入油缸流量 2.2 出口节流通过调节出口节流面积,限制油液流出,有杆腔有压力,油缸速度降低;图2-2-1 图2-2-2油缸速度与有杆腔流量qB 成正比,qB 由PB 和A 就决定,所以调节节流孔大小可以调节速度。
图2-2-3 图2-2-4 图2-2-5 以上原理同进口节流相似使用单向节流阀的进口节流回路:由于两腔面积不同,同样的速度时,进出流量不同,所以不同程度的节流。
工程机械液压系统节能技术综述与发展1 工程机械液压系统节能技术1.1 液压系统的节能技术工程机械液压系统节能实现目的需要借助于节能液压元件。
节能液压元件能量的消耗一般都是集中于油液泄露、内摩擦等环节上,在这一些环节中流量和压力都会存在损失。
在工程机械液压系统中常见的能量转换元件又液压泵、液压马达以及液压缸等,这些元件的能量损失相对来讲比较大,一些其他的元件能耗相对较小。
目前从节能液压元件入手所做的优化是将齿轮式结构更换为叶片式结构,在经过一系列的发展和进步之后形成柱塞式结构。
提高的不仅是负载速度,还有容积效率以及机械效率。
在工业生产中现在采用的比较多的具有节能效果的元件又柱塞泵,能够大大降低摩擦所造成的能耗,在这一过程中采用的方式在一些斜盘以及柱塞和缸体的表面涂抹特殊材料,这样达到降低能耗的目的。
另外的则是针对液压泵的优化和改进,即丰富液压泵的变量控制方式。
另外针对液压系统作出的功率匹配技术也提高工程机械的节能效果。
这种技术最大程度上解决了液压系统输出功率与负载特性曲线之间的协调性问题,降低流量和压力的损耗,提升液压系统的能量利用率。
虽然目前液压系统的功率匹配技术还处于发展和完善阶段,但是前景非常广阔。
关于正流量和负流量的控制技术也在不断地提高。
正流量主要是依靠主控阀阀芯先导控制压力,负流量则是借助液压泵的作用,完成对排量的控制。
工程机械液压系统节能技术还表现在负载传感控制系统的发展和完善上面,负载传感控制系统能够反馈负载流量和压力,这种反馈可以以电液信号的方式实现,促进了负载压力与系统流量之间的适应和匹配性。
除此之外,在工程机械液压系统节能技术中表现最为突出的是柴油机电喷控制,因为柴油机是工程机械液压系统的动力源。
电喷控制技术能够提高喷油泵的循序量,并且可以确保转速不影响到喷油泵工作,工作效率会大大提高。
1.2 回收再利用能量技术能量的回收再利用技术与发动机息息相关。
众所周知,发动机在运转的过程中会输出并负载能量,进而达到对能量的回收再利用。
正流量与负流量我们知道,在挖掘机上,各执行元件的速度会随操作手柄的行程的变化而变化,液压系统会根据这种变化对其排量进行控制,负流量和正流量的区别就在于这种变化的信号采集位置的不同.负流量:手柄行程越大,对应的二次先导压力也会越大,由二次先导压力控制的主阀芯的开启度也会越大, 与之对应, 主阀芯的开启度越大,主油路分向执行元件的油越多,执行元件的速度就会越快,通过中位流经负压信号发生装置的油越少,负压信号的压力值就会越小;反之如果手柄行程越小,对应的二次先导压力也会越小,由二次先导压力控制的主阀芯的开启度也会越小, 与之对应, 主阀芯的开启度越小,主油路分向执行元件的油越少,执行元件的速度就会越慢, 通过中位流经负压信号发生装置的油就越多,负压信号的压力值就会越大.液压泵根据负压信号的压力值的大小来对其排量进行控制.这就是负流量控制.他的信号采集点是主油路中主控制阀的出口处.正流量:在正流量的主控制阀上没有负压信号发生装置,他的信号采集于二次先导.其它部分与负流量没有什么区别.与负流量相比正流量为什么操作敏感性好:由于负压控制的信号采集点在主挖掘阀的出口处,只有主控制阀有动作时此负压信号才会发生变化,从而使泵的排量发生变化,这就使得液压泵的控制永远滞后于主控制阀的控制.而在正流量中,由于泵的控制信号采集于二次先导压力,此压力信号同时发送液压泵和主控制阀,这就是使的两者的动作可以同步进行.这就是“与负流量相比正流量操作敏感性好”的主要原因.与负流量相比正流量为什么节油:在负流量控制的液压系统中,负压信号的压力大约是5MPa到6MPa,此压力只用于产生负压信号;而正流量控制的液压系统中,由于没有此装置,他的回油压力仅仅是背压(一般在0.5MPa左右),这就减少了一个不必要的功率损失,从而使的正流量的挖掘机在完成同样工作量的情况下一定比负流量控制的挖掘机省油.。

液压挖掘机的三种流量控制方式摘要:在液压挖掘机的负载适应控制策略中,负流量(Negative Flow Control)、正流量控制(Positive Flow Control)及负荷传感器控制(Load Sensing Control)三种流量控制方式的流行称谓,是按其泵控特性来分类的。
本文通过对多种厂牌型号挖掘机的比较分析,提出了旁通流量控制(By-pass Flow Control)、先导传感控制(Pilot Sensing Control)及负荷传感控制的分类。
这一分类方法,对于设计时比较不同控制系统的性能和维修时理解不同控制系统结构和功能的特点,都有所裨益。
1.流量控制在挖掘机的液压系统内,流量Q、压力P及能耗(流量损失ΔQ、压力损失ΔP)等参数的变化,反映了液压传动过程的控制特性。
液压系统工作时,压力P不是系统的固有参数,而是由外负荷决定的。
因此,当发动机转速n e一定时,要对液压系统的功率进行调节,其实是对液压缸、液压马达等执行元件的进油量Q a进行调节(参看图1)。
图1.流量调节如图2所示,有两种方法调节系统流量。
第一种方法是泵控方式,通过改变主泵的每转排量q来调节主泵的输出流量Q p,称为容积调速。
常见的容积调速方式包括:①利用主泵出口压力P P与主泵排量q的乘积保持不变的恒扭矩控制;②利用发动机转速传感(ESS)使主泵吸收的扭矩p P q与主泵转速n的乘积保持不变的恒功率控制;③在临近系统溢流压力时,减小主泵排量的压力切断控制;④配用破碎头等作业附件时,由外部指令限定主泵最大排量的最大流量二段控制;⑤双泵系统中,利用两泵出口压力的平均值与主泵流量乘积保持不变的交叉功率控制(相加控制或总功率控制);⑥多泵系统中,因主泵组的液压总功率大于发动机的输出功率,为防止发动机出现失速,采用了极限负荷控制。
除了容积调速,还有一种泵控方式是通过动力模式下的变功率控制,利用外部指令设定不同工况下不同的发动机输出功率来改变主泵转速n e,从而调节主泵输出流量Q=nq。

近年来有部分的公司推出正流量控制,并且如此这般地说正流量有诸多好处,而我们日常生活中的常见的是负流量控制的,正负流量到底有什么差别呢?我们一起分析一下吧。
正流量控制系统:????? ?优点:主泵和先导操作手柄输出的压力成正比例关系(依据这些判断对主泵的液压油排量加以控制,因此得名正流量)主控制器根据先导压力信号及其变化趋势判断出流量需求及这种需求的变化趋势。
实现了对变量泵的实时控制,做到按需求供油。
相对于负流量控制系统,正流量”响应时间更短,流量动摇更小,可操作性更好,可提高工作效率约9%节油12%左右,系统的可靠性也更高。
????? ?缺点:技术含量高,只有少数几个企业掌握了这项技术。
负流量控制系统:?? 优点:能够充分利用发动机功率,根据负荷的大小自动调节泵流量,自动适应外载变化。
?? 缺点:使用过程中流量波动大、响应时间长、支配性能差。
????????从上面的分析可以看出,与“负流量”相比,正流量”除了技术难度高以外,其它性能方面都超过了负流量”随着“正流量”普及,采用“负流量”技术的厂家会感到越来越大的市场压力。
液压挖掘机作为一类快速、高效的旌工机械愈来愈被人们所认识。
它是一种大功率设备,其节能性的好坏直接影响了设备使用的经济性和可靠性。
挖掘机回转液压系统是液压挖掘机的重要组成部分,对其整机性能有着巨大的影响,本文通过研究挖掘机的节能,分析对比了传统挖掘机回转液压系统与负载敏感回转液压系统的效率1.1课题研究的背景和意义挖掘机是重要的建筑机械装备,应用于港口建设、房屋建筑、水利建设、国防工程、农田开发、道路工程等土石方施工和矿山的采掘,其对减轻人类的体力劳动,保证工程质量,加速建设速度,提高生产率发挥着巨大作用。
随着国民经济的快速发展,挖掘机在工程建设领域,特别是基础设施建设中的作用越来越明显,作为一类快速、高效的施工机械愈来愈被人们所认识。
据统计,2003年我国挖掘机总销售量突破6万台,其中国内液压挖掘机销量总和达到3.48万台,成为世界第一大挖掘机市场。
正流量控制和负流量控制的区别在我们常见的挖掘机中,除了小松使用LS控制外,大部分都使用负流量控制。
近年来有部分的公司推出正流量控制,并且如此这般地说正流量有诸多好处,那么正流量真的有那么神吗?挖掘机上为了更有效地利用发动机的功率通常都采用恒功率变量泵,所谓的恒功率变量泵通俗一点说就是泵的压力与泵的流量的乘积是一个常数,如果这个数值大于发动机的功率时就会出现我们常说的憋车。
所以每个设计者就其设计思想来说,都必须是使整个液压系统的功率无限接近发动机的功率而又绝对不能大于发动机的功率。
挖掘机的恒功率控制在挖掘机的恒功率控制上分为两个部分:一是泵内部的功率控制:他是根据本泵的输出压力和他泵(另一个泵)的输出压力对泵的排量进行的控制,当压力升高时,泵的排量随之减小;当压力降低时,泵的排量随之增大;如果系统的压力低于先导压力时则引入先导压力对其排量进行控制.无论是对于正流量还是负流量,就此一部分而言,不管是从理论上还是从结构上都没有什么不同,也就是说在此部分没有什么正流量和负流量之分.这是液压泵恒功率控制的主体,在此不作讨论.二是外部信号对泵的功率的控制:这里说的外部信号是指先导操作系统,主压力系统,发动机系统等等等等一切与泵的功率控制有关的信息的综合.在负流量中是负压信号和其它信号的综合,在正流量中是正压信号和其它信号的综合.这两个其它信号也没有什么不同,关键就在于负压信号和正压信号的区别.我们知道,在挖掘机上,各执行元件的速度会随操作手柄的行程的变化而变化,液压系统会根据这种变化对其排量进行控制,负流量和正流量的区别就在于这种变化的信号采集位置的不同.什么是负流量控制系统?手柄行程越大,对应的二次先导压力也会越大,由二次先导压力控制的主阀芯的开启度也会越大, 与之对应, 主阀芯的开启度越大,主油路分向执行元件的油越多,执行元件的速度就会越快,通过中位流经负压信号发生装置的油越少,负压信号的压力值就会越小;反之如果手柄行程越小,对应的二次先导压力也会越小,由二次先导压力控制的主阀芯的开启度也会越小, 与之对应, 主阀芯的开启度越小,主油路分向执行元件的油越少,执行元件的速度就会越慢, 通过中位流经负压信号发生装置的油就越多,负压信号的压力值就会越大.液压泵根据负压信号的压力值的大小来对其排量进行控制.这就是负流量控制.他的信号采集点是主油路中主控制阀的出口处什么是正流量控制系统?正流量控制系统,是力士乐上世纪80年代的技术,主要特点是:操纵手柄的先导压力不仅控制换向阀,还用来调节油泵的排量。
所谓正负流量控制,说的是泵的控制方式。
负流量控制是通过负载返作用于泵,控制泵的排量,从而实现有动作时流量大,无动作时流量小。
正流量控制是人为控制泵的排量,需要大流量时就控制着输出一个大流量,需要小流量就控制着输出一个小流量。
液压系统中所有的控制都是由阀执行的。
简单的来说正负流量控制是指变量泵通过压力控制得到所需流量,负流量控制就是随着液控压力提高,泵摆向较小的排量。
正流量控制就是随着液控压力提高,泵摆向较大的排量。
挖掘机上为了更有效地利用发动机的功率通常都采用恒功率变量泵,所谓的恒功率变量泵通俗一点说就是泵的压力与泵的流量的乘积是一个常数,如果这个数值大于发动机的功率时就会出现我们常说的憋车。
所以每个设计者就其设计思想来说,都必须是使整个液压系统的功率无限接近发动机的功率而又绝对不能大于发动机的功率。
挖掘机的恒功率控制在挖掘机的恒功率控制上分为两个部分:一是泵内部的功率控制:他是根据本泵的输出压力和他泵(另一个泵)的输出压力对泵的排量进行的控制,当压力升高时,泵的排量随之减小;当压力降低时,泵的排量随之增大;如果系统的压力低于先导压力时则引入先导压力对其排量进行控制.无论是对于正流量还是负流量, 就此一部分而言,不管是从理论上还是从结构上都没有什么不同,也就是说在此部分没有什么正流量和负流量之分.这是液压泵恒功率控制的主体,在此不作讨论. 二是外部信号对泵的功率的控制:这里说的外部信号是指先导操作系统,主压力系统,发动机系统等等等等一切与泵的功率控制有关的信息的综合.在负流量中是负压信号和其它信号的综合,在正流量中是正压信号和其它信号的综合.这两个其它信号也没有什么不同,关键就在于负压信号和正压信号的区别.我们知道,在挖掘机上,各执行元件的速度会随操作手柄的行程的变化而变化,液压系统会根据这种变化对其排量进行控制,负流量和正流量的区别就在于这种变化的信号采集位置的不同.什么是负流量控制系统?手柄行程越大,对应的二次先导压力也会越大,由二次先导压力控制的主阀芯的开启度也会越大, 与之对应, 主阀芯的开启度越大,主油路分向执行元件的油越多,执行元件的速度就会越快,通过中位流经负压信号发生装置的油越少,负压信号的压力值就会越小;反之如果手柄行程越小,对应的二次先导压力也会越小,由二次先导压力控制的主阀芯的开启度也会越小, 与之对应, 主阀芯的开启度越小,主油路分向执行元件的油越少,执行元件的速度就会越慢, 通过中位流经负压信号发生装置的油就越多,负压信号的压力值就会越大.液压泵根据负压信号的压力值的大小来对其排量进行控制.这就是负流量控制.他的信号采集点是主油路中主控制阀的出口处什么是正流量控制系统?正流量控制系统,是力士乐上世纪80年代的技术,主要特点是:操纵手柄的先导压力不仅控制换向阀,还用来调节油泵的排量。
负载敏感、负流量、正流量的区别(二)系统稳定性与响应性对于液压系统的流量控制,可用图2来分析系统控制过程的特性。
控制量(流量)达到目标值的时间(响应时间)越短,动态响应就快;控制过程中超调量(控制偏差)越小,稳定时间就短。
响应快、稳定时间短,就表明控制的动态特性好。
系统稳定之后,流量的实际值与目标值之差就是稳态偏差。
稳态偏差小,表明静态特性好,即系统稳定性好。
图2 系统的控制过程从流量特性来看(图3),在旁通流量控制(图3-a)和先导传感控制(图3-b)系统中,当操作手柄中位时,主泵有备用流量,因此都比无备用流量的负荷传感控制(图3-c)的动态响应快。
由于旁通流量控制的信号采集点位于主控阀的旁通油路末端,泵控滞后于阀控的延时较先导传感控制长一些,所以动态响应较慢。
(a) (b) (c)图3 流量特性的比较从泵控特性来看(图4),无论旁通流量控制(图4-a),还是先导传感控制(图4-b),控制压力Pi与与流量Q的关系曲线都是有坡度的,不像负荷传感控制中压差ΔP与流量Q的关系曲线那样陡变(图4-c)。
因此,旁通流量控制和先导传感控制的超调量比负荷传感控制小(参看图3),动态特性比负荷传感控制好。
图4 泵控特性的比较一般的旁通流量控制和先导传感控制都是采用机-液结构实现比例控制,由于存在机械惯性,不可避免地存在静态误差,最终也会影响系统的控制性能。
在神钢的挖掘机上采用了电液比例技术加以改进,但是,这两种控制系统的主要问题都是一种开环控制,无法对执行元件负荷压力对流量的影响作出实时响应。
负荷传感控制系统具有较好的静态特性,是因为对流量采用了闭环控制,如图5所示。
当负荷PLS增大,使发动机转速n下降时,主泵流量Q会减小,主控阀节流前的压力Pp随之减小。
于是,压差ΔPLS(=Pp-PLS)将减小。
主泵的LS阀调大主泵排量q,反之亦然。
即使发动机转速下降或上升,泵流量Q(=n*q)都相对稳定在目标值左右,流量Q的调节过程与发动机的转速无关,也就是说,对于外界干扰(负荷变动),因负荷传感反馈信号ΔPLS的作用,负荷传感控制系统具有很好的稳定性,增大了系统的刚度。
挖掘机三种液压系统,一个就在国内比较多见的负流量,还有一种就是被炒得很火的正流量,另外一种就是欧州最为常用的负荷传感。
正流量与负流量同是开中心,负荷传感为闭中心。
开中心典型为负流量,其价格相对底兼,至于正流量价格一定不低,其成功批量应用可以说是等于零!呵呵!开中心的代表为川崎,闭中心的代表为德国林德LSC(1978年就已经在Altas上应用,如果了解小松,你们就知道其Class的由来,这里不多做介绍),我要更正一点就是rexroth在中挖并没有历史,各位力士迷们希望别以为力士乐都行!哈哈!都知道螺纹插装阀不如SUN吧!径向柱塞不如合格龙吧!应用上有地区因素:因欧州人生活水平较高,他们对可操作要求高,所以具动作可预知性且与负载无关的LSC在欧州最为流行,但其价格比负流量高点!在亚洲地区劳动力便宜且劳动力充足,这就决定在中国的老板更偏向于采用需要比较丰富经验才能开好的动作与负载压力有关的负流量系统。
在能耗上看:负流量在阀中位时都有30L/min左右的流量进入油箱。
我这里只举一种功况:负载轻载移动时,进入油箱的流量为减少很少,但当负载增加到很大,这时进入油箱的流量会增大,然后泵排量减小,当进入油箱流量到达近30L后,负载可以说动作降到非常慢,这样系统压力应该在30MPa,大家算一下这会产生多少节流损失?在挖机这种工况时时发生!应该是一种典型工况!负流量也在一种跟正流量一样的情况,就是当手柄最大,泵近最大排量,可这里是一个很大负载,系统压力高,可是执行机构只需要一点流量,可是近全排量的泵注入!这样大部分油液将经过开中心阀溢流进入油箱!这样将是巨大的能量浪费!别以为正流量是需要多少供多少!在来谈谈林德LSC,哈哈!大家一定说LSC是什么东西了吧!有兴趣去找找Altas 和volvor的负载敏感系统轮挖,也许能给点印像给你!LSC的多路阀就是大家了解的阀后补尝阀,当Rexroth开发1.5回路时,人家已经是双回路了(这可不是定量系统的双回路)。
在我们常见的挖掘机中,长沙挖掘机培训除了小松使用LS控制外,大部分都使用负流量控制。
近年来有部分的公司推出正流量控制,并且如此这般地说正流量有诸多好处,那么正流量真的有那么神吗?让我们在下边以川崎K3V系列为例来分析一下挖掘机上液压泵地控制原理:挖掘机上为了更有效地利用发动机的功率通常都采用恒功率变量泵,所谓的恒功率变量泵通俗一点说就是泵的压力与泵的流量的乘积是一个常数,如果这个数值大于发动机的功率时就会出现我们常说的憋车。
所以每个设计者就其设计思想来说,都必须是使整个液压系统的功率无限接近发动机的功率而又绝对不能大于发动机的功率。
挖掘机的恒功率控制在挖掘机的恒功率控制上分为两个部分:一是泵内部的功率控制:他是根据本泵的输出压力和他泵(另一个泵)的输出压力长沙挖掘机培训对泵的排量进行的控制,当压力升高时,泵的排量随之减小;当压力降低时,泵的排量随之增大;如果系统的压力低于先导压力时则引入先导压力对其排量进行控制.无论是对于正流量还是负流量,就此一部分而言,不管是从理论上还是从结构上都没有什么不同,也就是说在此部分没有什么正流量和负流量之分.这是液压泵恒功率控制的主体,在此不作讨论.二是外部信号对泵的功率的控制:这里说的外部信号是指先导操作系统,主压力系统,发动机系统等等等等一切与泵长沙挖掘机培训的功率控制有关的信息的综合.在负流量中是负压信号和其它信号的综合,在正流量中是正压信号和其它信号的综合.这两个其它信号也没有什么不同,关键就在于负压信号和正压信号的区别.负流量:手柄行程越大,对应的二次先导压力也会越大,由二次先导压力控制的主阀芯的开启度也会越大, 与之对应, 湖南挖掘机培训主阀芯的开启度越大,主油路分向执行元件的油越多,执行元件的速度就会越快,通过中位流经负压信号发生装置的油越少,负压信号的压力值就会越小;反之如果手柄行程越小,对应的二次先导压力也会越小,由二次先导压力控制的主阀芯的开启度也会越小, 与之对应, 主阀芯的开启度越小,主油路分向执行元件的油越少,执行元件的速度就会越慢, 通过中位流经负压信号发生装置的油就越多,负压信号的压力值就会越大.液压泵根据负压信号的压力值的大小来对其排量进行控制.这就是负流量控制.他的信号采集点是主油路中主控制阀的出口处.正流量:在正流量的主控制阀上没有负压信号发生装置,他的信号采集于二次先导.其它部分与负流量没有什么区别.与负流量相比正流量为什么操作敏感性好:由于负压控制的信号采集点在主挖掘阀的出口处,只有主控制阀有动作时此负压信号才会发生变化,从而使泵的排量发生变化,这就使得液压泵的控制永远滞后于主控制阀的控制.而在正流量中,由于泵的控制信号采集于二次先导压力,此压力信号同时发送液压泵和主控制阀,这就是使的两者的动作可以同步进行.这就是湖南挖掘机培训“与负流量相比正流量操作敏感性好”的主要原因.与负流量相比正流量为什么节油:在负流量控制的液压系统中,负压信号的压力大约是5MPa到6MPa,此压力只用于产生负压信号;而正流量控制的液压系统中,由于没有此装置,他的回油压力仅仅是背压(一般在0.5MPa左右),这就减少湖南挖掘机培训了一个不必要的功率损失,从而使的正流量的挖掘机在完成同样工作量的情况下一定比负流量控制的挖掘机省油.。
1.正负流量控制定义:所谓正负流量控制,说的是泵的控制方式,变量泵有一个控制口,如果这个控制口的控制压力越高,泵的排量越大,就是正流量控制,反之就是负流量控制.正负流量控制是指变量泵通过压力控制得到所需流量:负流量控制就是随着液控压力提高;泵摆向较小的排量。
正流量控制就是随着液控压力提高;泵摆向较大的排量。
现在一般的控制都是负流量控制!最典型的就是工程液压上面的多路阀用的就是负流量控制!(通过多路阀出口的液阻,液阻前后的压差值来控制的泵的流量,要是压差大就促使泵的流量变小,最后在小流量上维持一个平衡。
就是负流量控制)不最近听三一的朋友说!三一现在出了台正流量的挖掘机!从控制的技术水平来将还是在前沿的!主要就是节能。
采用负流量控制的原因是原动机的功率是一个定值,在不超过原动机的能力(功率)的情况下,使输出流量最大(即使工作机械得到最大的速度)。
负流量控制用得很多,基本上是配恒功率泵。
齿轮泵属于定量泵,对于定量泵是没有什么正负控制的。
而所谓的正负控制只是针对变量泵而言的。
泵的排量要有控制信号,在泵没有输出信号时,泵初如排量应为多少呢?很显然,要不就是近零左右的排量,要不就是接近100%左右的排量。
这样大家所谓的正流量与负流量了吧!其就是泵排量与控制信号相对应关系的两种叫法!信号增加排量从零增加叫正排量控制(排量不就是流量吗?)反之就是负流量控制!这种叫法对开式泵和比式泵都是一样的!记住,只是泵的排量与信号的关系,别被挖机的以泵正流量负流量搞得乱晕晕的!你们要知道作为开式系统(阀控系统)最为典型和复杂的应用,在系统中泵只是一个流量源罢了!最重要还是阀的问题。
负流量控制是通过负载返作用于泵,控制泵的排量,从而实现有动作时流量大,无动作时流量小。
正流量控制是人为控制泵的排量,需要大流量时就控制着输出一个大流量,需要小流量就控制着输出一个小流量。
液压系统中所有的控制都是由阀执行的。
负流量一般小日本用得多,负载敏感欧美用得多。
挖掘机控制系统讲解1.中心开式负荷传感系统原理图1表明中心开式负荷传感液压系统(OLSS)的原理。
图2是主泵工作的特性曲线,泵在一定转速下,工作点无论在哪条曲线上,它的纵、横坐标分别是压力和流量,两者的乘积就是功率。
图1中所表示的操纵阀是大为简化了的多路阀示意图,它由先导或机械手柄、踏板控制其开度。
阀芯在中位时,其中心油路是开放的,主泵回油从此通过,故称之为“中心开式”。
手柄、踏板开度增大时,阀芯A口、B口开度也按比例增大,工作油量增多,使阀中心开度减小、回油量减小;反之,回油量则增大。
射流传感器(以下称射流阀)装于多路阀回油路的末端,主阀开度越小,则回油量越大,射流阀的进、出油压差就越大,其输出压差(Pd-Pb)也越大;反之,此压差就越小。
在主泵上还装有负流量控制阀(NC阀),当Pd-Pb压差增大时,它的开度就减小,使控制泵油压Pi减小、主泵输出功率减小;反之,输出功率增大。
该系统在发动机带动主泵空运转时,全部液压油通过主阀中心及射流阀回油箱,此时射流阀进、出油压差最大,输出压差Pd-Pb也最大,NC阀开度最小,控制泵的油压受到最强的节流,输出油压Pi最小,主泵伺服缸驱使主泵输出最小流量。
当人为操作控制手柄、踏板满负荷工作时,情况与以上相反,主阀回油量最小,主泵输出最大功率(见图2)。
当中度负荷工作时,控制主阀开度不大,主泵输出功率介于上述两种情况之间,按与其开度相适应的特性曲线工作(主阀开度大小决定工作的那条曲线),以节省能量。
图3中的(a)、(b)、(c)分别是在空负荷、轻负荷和强阻力作业时该系统的节能效果图。
传统的恒功率控制只在最外特性曲线上工作,所消耗的功率由0abc四边形面积决定;中心开式负荷传感系统也可在最外特性曲线上工作,但当在空负荷、轻负荷和强阻力作业时,消耗功率由0123四边形面积决定,两者的面积差(图中影线部分)就是后者较前者所节省的能量。
2.负流量控制系统原理图4表示负流量控制系统原理。
正流量与负流量
流量
在我们常见的挖掘机中,除了小松使用LS控制外,大部分都使用负流量控制。
近年来有部分的公司推出正流量控制,并且如此这般地说正流量有诸多好处,那么正流量真的有那么神吗?让我们在下边以川崎K3V系列为例来分析一下挖掘机上液压泵地
控制原理:
挖掘机上为了更有效地利用发动机的功率通常都采用恒功率变量泵,所谓的恒功率变量泵通俗一点说就是泵的压力与泵的流量的乘积是一个常数,如果这个数值大于发动机的功率时就会出现我们常说的憋车。
所以每个设计者就其设计思想来说,都必须是使整个液压系统的功率无限接近发动机的功率而又绝对不能大于发动机的功率。
挖掘机的恒功率控制
在挖掘机的恒功率控制上分为两个部分:一是泵内部的功率控制:他是根据本泵的输出压力和他泵(另一个泵)的输出压力对泵的排量进行的控制,当压力升高时,泵的排量随之减小;当压力降低时,泵的排量随之增大;如果系统的压力低于先导压力时则引入先导压力对其排量进行控制.无论是对于正流量还是负流量,就此一部分而言,不管是从理论上还是从结构上都没有什么不同,也就是说在此部分没有什么正流量和负流量之分.这是液压泵恒功率控制的主体,在此不作讨论.二是外部信号对泵的功率的控制:这里说的外部信号是指先导操作系统,主压力系统,发动机系统等等等等一切与泵的功率控制有关的信息的综合.在负流量中是负压信号和其它信号的综合,在正流量中是正压信号和其它信号的综合.
这两个其它信号也没有什么不同,关键就在于负压信号和正压信号的区别.
我们知道,在挖掘机上,各执行元件的速度会随操作手柄的行程的变化而变化,液压系统会根据这种变化对其排量进行控制,负流量和正流量的区别就在于这种变化的
信号采集位置的不同.
负流量:
手柄行程越大,对应的二次先导压力也会越大,由二次先导压力控制的主阀芯的开启度也会越大, 与之对应, 主阀芯的开启度越大,主油路分向执行元件的油越多,执行元件的速度就会越快,通过中位流经负压信号发生装置的油越少,负压信号的压力值就会越小;反之如果手柄行程越小,对应的二次先导压力也会越小,由二次先导压力控制的主阀芯的开启度也会越小, 与之对应, 主阀芯的开启度越小,主油路分向执行元件的油越少,执行
元件的速度就会越慢, 通过中位流经负压信号发生装置的油就越多,负压信号的压力值就会越大.液压泵根据负压信号的压力值的大小来对其排量进行控制.这就是负流量控制.他
的信号采集点是主油路中主控制阀的出口处.
正流量:
在正流量的主控制阀上没有负压信号发生装置,他的信号采集于二次先导.其它
部分与负流量没有什么区别.
与负流量相比正流量为什么操作敏感性好:
由于负压控制的信号采集点在主挖掘阀的出口处,只有主控制阀有动作时此负压信号才会发生变化,从而使泵的排量发生变化,这就使得液压泵的控制永远滞后于主控制
阀的控制.
而在正流量中,由于泵的控制信号采集于二次先导压力,此压力信号同时发送液压泵和主控制阀,这就是使的两者的动作可以同步进行.这就是“与负流量相比正流量操作敏感性
好”的主要原因.
与负流量相比正流量为什么节油:
在负流量控制的液压系统中,负压信号的压力大约是5MPa到6MPa,此压力只用于产生负压信号;而正流量控制的液压系统中,由于没有此装置,他的回油压力仅仅是背压(一般在0.5MPa左右),这就减少了一个不必要的功率损失,从而使的正流量的挖掘机在完成同样工作量的情况下一定比负流量控制的挖掘机省油.
一、负流量控制系统:优点:能够充分利用发动机功率,根据负荷的大小自动调节泵流量,自动适应外载变化。
缺点:使用过程中流量波动大、响应时间长、操纵性能差。
二、正流量控制系统:优点:主泵和先导操作手柄输出的压力成正比例关系,(因此得名正流量)主控制器根据先导压力信号及其变化趋势判断出流量需求及这种需求的变化趋势,依据这些判断对主泵的液压油排量加以控制,实现了对变量泵的实时控制,做到了按需求供油。
相对于负流量控制系统,“正流量”的响应时间更短,流量波动更小,可操作性更好,可提高工作效率约9%,节油12%左右,系统的可靠性也更高。
缺点:技术含量高,只有少数几个企业掌握了这项技术。
从上面的分析可以看出,与“负流量”相比,“正流量”除了技术难度高以外,在其它性能方面都超过了“负流量”。
随着“正流量”的普及,采用“负流量”技术的厂家会感到越来越大的市场压力。
?。