电动助力转向系统的控制系统设计
- 格式:ppt
- 大小:587.00 KB
- 文档页数:40
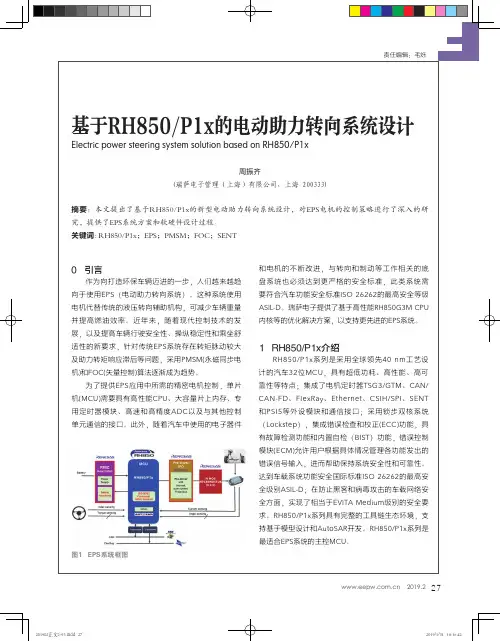
图1 EPS系统框图
2 系统设计
EPS系统如图1所示,包含以下。
A、电源管理部分:提供EPS系统所需要的各种电压,并能实现自我诊断和保护,提供对MCU的外部看门狗监控、SPI通信等;
B、传感器部分:采集电机的位置和电流等信号,电池电压等;
C、通信部分:包括CAN、SENT、SPI等,获取方向盘扭矩、车速等信息;
D、MCU控制部分:根据扭矩信号和车辆的状态,控制EPS助力策略;的PWM输出信号;
D、ENCA编码器:ENCA
信号,获得电机的位置;
E、TPBA定时器模式缓冲器
器的激励信号。
关于电机位置/转速信号的获取
多种方式:如果使用旋变编码器来检测电机位置以使用TPBA产生旋变编码器的激励信号
样返回的Sin和Cos信号,
信息;如果使用增量式编码器时
图2 EPS电机控制框图
图3 EPS软件控制框图
ELECTRONIC ENGINEERING & PRODUCT WORLD2019.2
严刚(1984-),男,嵌入式研发工程师,主要研究方向:智能家用电器基础技术研究及产品应用。
51
2019.2。
电动助力转向课程设计一、教学目标本课程旨在让学生了解和掌握电动助力转向系统的基本原理、结构和应用,培养学生分析和解决实际问题的能力,提高学生的实践技能和科学素养。
具体目标如下:1.知识目标:学生能够描述电动助力转向系统的工作原理、主要组成部分和性能特点;了解电动助力转向系统在现代汽车中的重要作用。
2.技能目标:学生能够运用所学知识分析电动助力转向系统的性能,进行简单的故障诊断和维修;能够设计并实施一个小型的电动助力转向系统实验。
3.情感态度价值观目标:培养学生对汽车行业的兴趣和热情,增强学生对科技创新的认识,培养学生的团队协作能力和责任感。
二、教学内容本课程的教学内容主要包括以下几个部分:1.电动助力转向系统的原理:介绍电动助力转向系统的工作原理,包括电动机、转向机、控制器等主要部件的作用和相互关系。
2.电动助力转向系统的结构:讲解电动助力转向系统的结构组成,包括电动机、转向机、控制器、电源、传感器等部件的布局和连接方式。
3.电动助力转向系统的性能:分析电动助力转向系统的性能特点,如助力效果、响应速度、能耗等,并与传统机械转向系统进行比较。
4.电动助力转向系统的应用:介绍电动助力转向系统在现代汽车中的应用情况,以及未来发展趋势。
5.故障诊断与维修:讲解电动助力转向系统的故障诊断方法,如症状分析、故障码读取、实际操作等;介绍常见的故障维修方法和安全注意事项。
三、教学方法为了提高教学效果,本课程将采用多种教学方法相结合的方式进行授课:1.讲授法:通过讲解电动助力转向系统的原理、结构和应用,使学生掌握基本知识。
2.讨论法:学生针对实际案例进行分析讨论,提高学生分析问题和解决问题的能力。
3.案例分析法:通过分析典型故障案例,使学生了解电动助力转向系统的故障诊断和维修方法。
4.实验法:安排实验室实践环节,让学生亲自动手进行实验,增强学生的实践技能。
四、教学资源为了支持本课程的教学,我们将准备以下教学资源:1.教材:选择权威、实用的教材,为学生提供系统、全面的学习资料。
目录摘要 (I)ABSTRACT (II)第1章绪论 (1)1.1转向助力系统的国内外研究现状与发展趋势 (1)1.2选题的目的和意义 (3)1.3本课题研究的内容和拟解决的主要问题 (4)1.3.1 本课题的主要内容 (4)1.3.2 拟解决的主要问题 (4)第2章EPS系统的组成 (5)2.1EPS工作原理与结构组成 (5)2.2传统液压动力转向系统 (5)2.3电动助力转向系统特点 (6)2.4EPS的类型 (6)2.5助力系统的关键部件 (7)2.5.1 助力电机 (7)2.5.2 转矩传感器 (7)2.5.3 车速传感器 (8)2.5.4 电子控制单元 (9)2.6本章小结 (11)第3章EPS系统的硬件设计 (12)3.1EPS系统硬件电路结构 (12)3.2单片机最小系统电路 (12)3.2.1 时钟电路 (12)3.2.2 复位 (13)3.3电源电路 (14)3.4电动机的驱动 (15)3.5三态缓冲器 (17)3.6电动机的变频调速控制 (18)3.7电动机H桥驱动方式 (18)3.8本章小结 (19)第4章EPS控制策略和软件设计 (20)4.1EPS系统的控制要求 (20)4.1.1 回正控制 (20)4.1.2 阻尼控制 (20)4.2转向助力特性曲线的选择 (21)4.2.1 助力特性的理论研究 (21)4.2.2 助力特性曲线的选择 (21)4.3EPS的软件设计 (22)4.3.1 开发环境 (22)4.3.2 数字滤波程序设计 (24)4.3.3AD模块 (25)4.3.4 电机助力子程序 (26)4.3.5 系统主程序 (27)4.4本章小结 (27)第5章软件下载及系统的试验 (28)5.1STC单片机程序下载器的使用 (28)5.2系统的试验 (30)5.3系统的调试 (30)5.4本章小结 (30)结论 (32)参考文献 (33)致谢 (34)附录A (35)附录B (43)附录C (46)第1章绪论1.1 转向助力系统的国内外研究现状与发展趋势助力转向系统按照提供动力的形式大致可以分为了纯机械式转向系统(Manual Steering,简称MS)、液压式转向系统(Hydraulic Power Steering,简称HPS)、电控液压式转向系统(Electro Hydraulic Power Steering,简称EHPS)、电动助力式转向系统(Electric Power Steering,简称EPS)。
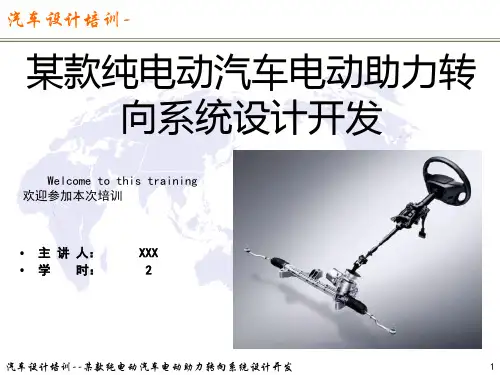
汽车电动助力转向系统的设计概述汽车电动助力转向系统是一种电子辅助转向系统,为驾驶员提供操纵方向盘的力量辅助,以改善驾驶操控性和舒适性。
该系统通过电动助力装置来替代传统的液压助力转向系统,具有更高的效率和响应性。
本文将详细介绍汽车电动助力转向系统的设计原理和关键技术。
设计原理汽车电动助力转向系统的设计基于电动助力装置和转向控制单元的协同工作。
电动助力装置负责提供对转向系统的力量辅助,转向控制单元那么负责监测车辆的转向情况并根据驾驶员的输入进行控制。
电动助力装置电动助力装置由电机、减速器、传感器和控制单元组成。
电机负责提供动力,减速器那么用于降低电机的转速并增加转力。
传感器用于监测转向力和转向角度,并向控制单元提供反应信息。
控制单元根据传感器的反应信号来确定输出力的大小和方向。
转向控制单元转向控制单元由微处理器和控制算法组成。
微处理器负责处理传感器的数据和执行控制算法。
控制算法根据驾驶员的转向输入,计算出相应的助力输出指令,并通过电动助力装置将助力传递给转向系统。
关键技术功率电子技术汽车电动助力转向系统需要提供足够的力量辅助,因此需要采用功率电子技术来实现高效能的能量转换和控制。
功率电子技术包括电机驱动技术、功率开关技术和电源管理技术,它们的协同工作可以有效提高电动助力转向系统的效率和可靠性。
传感器技术传感器技术在汽车电动助力转向系统中起到了至关重要的作用。
传感器可以实时监测转向力和转向角度,从而提供准确的反应信息给控制单元。
常用的传感器包括转向力传感器和转向角度传感器,它们需要具有高精度和可靠性,以确保系统的准确性和稳定性。
控制算法控制算法是汽车电动助力转向系统的核心局部,它决定了系统的性能和操控性。
控制算法根据传感器的反应信息和驾驶员的转向输入,计算出相应的助力输出指令。
常用的控制算法包括比例-积分-微分〔PID〕控制算法和模糊控制算法,它们能够确保系统的稳定性和响应性。
设计考虑功率和效率汽车电动助力转向系统需要提供足够的助力,同时也要确保系统的功率和效率。
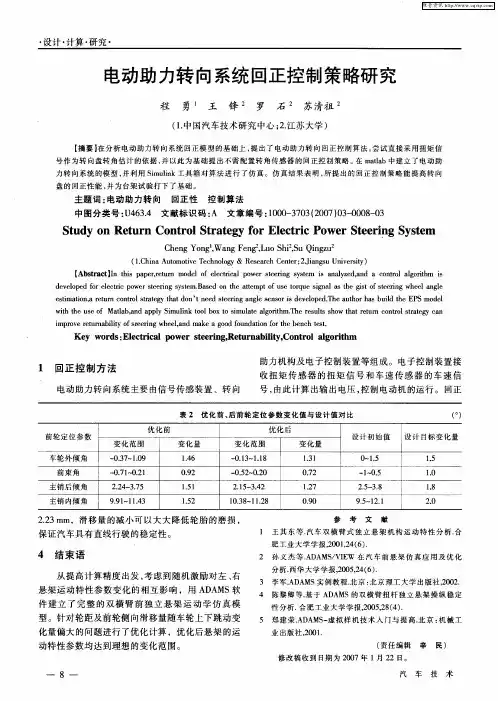
2007年7月农业机械学报第38卷第7期电动助力转向系统建模与补偿控制策略*申荣卫 林 逸 台晓虹 施国标 【摘要】 分析了电动助力转向系统各组成部分的数学模型,建立了基于M atlab /Simulink 的电动助力转向系统仿真模型。
构建了电动助力转向系统的两层控制策略,上层控制策略采用基本助力控制和补偿控制的方法确定目标电流,下层控制策略通过P ID 调节器完成对目标电流的准确跟踪控制。
仿真结果表明,设计的控制策略解决了转向轻便性和路感的问题,同时改善了转向的动态效果和回正能力。
关键词:车辆 电动助力转向 数学模型 补偿控制中图分类号:U 463.4文献标识码:AResearch on Modeling and Compensation Control Strategy ofElectric Power Steering SystemShen Rong wei 1 Lin Yi 1 T ai Xiaohong 2 Shi Guobiao1(1.B eij ing I nstitute of T echnology 2.X ingtai Vocational and Technical College )AbstractThe mathematic m odels o f electric pow er steering sy stem w er e analyzed and the simulation model based on M atlab/Simulink was built.Tw o layers contro l strategies w er e pro posed,w hich are top layer co ntrol strateg y and botto m layer contro l strateg y .T he top layer co ntrol strateg y calculates the target current by the methods o f basic assist control and compensation contro l ,and the botto m layer co ntrol strategy regulates the actual curr ent to tr ack the tar get current by the PID controller.The sim ulation results show ed that the problem s o f steering easiness and ro ad feel w ere solved ,the steer ing dynamic effect w as impr oved ,and the return ability w as increased .Key words Vehicle,Electric po wer steering ,M athematic model,Compensation control收稿日期:2006-03-07*北京市科委奥运用电动客车项目(项目编号:D0305002040111)申荣卫 北京理工大学机械与车辆工程学院 博士生,100081 北京市林 逸 北京理工大学机械与车辆工程学院 教授 博士生导师台晓虹 邢台职业技术学院汽车工程系 讲师,054035 河北省邢台市施国标 北京理工大学机械与车辆工程学院 讲师 引言电动助力转向系统(EPS)由于具有节能、环保和助力性能好等优点而受到越来越多的关注。
电动助力转向系统毕业设计开题报告一、选题背景和意义随着汽车行业的不断发展,电动助力转向系统在汽车领域起到越来越重要的作用。
电动助力转向系统可以通过对转向助力的控制,提供更好的操控性和驾驶舒适度,并减轻驾驶员的转向压力。
因此,对电动助力转向系统进行深入研究和开发具有重要的理论和实践意义。
二、研究内容和目标本课题主要研究电动助力转向系统的工作原理、控制方法以及其在汽车行业的应用。
具体来说,研究内容包括:1.电动助力转向系统的基本原理和工作机制;2.不同控制方法在电动助力转向系统中的应用;3.电动助力转向系统的动力学建模和仿真分析;4.电动助力转向系统的实验设计和数据分析。
本课题的研究目标主要包括:1.深入理解电动助力转向系统的工作原理和控制方法;2.分析不同控制方法的优缺点,并选择最佳的控制策略;3.建立电动助力转向系统的动力学模型,并进行仿真分析;4.设计实验验证电动助力转向系统的性能和可靠性。
三、研究方法和技术路线本课题主要采用理论研究和实验研究相结合的方法。
首先,通过查阅文献和资料,了解电动助力转向系统的基本原理和控制方法。
其次,对电动助力转向系统进行动力学建模,并通过仿真分析,验证模型的准确性和可靠性。
然后,设计实验平台,搭建电动助力转向系统的硬件环境,开展实验研究,并进行数据分析。
最后,根据实验结果和分析,总结出电动助力转向系统的性能特点和优化方向。
技术路线如下:1.理论研究:查找相关文献和资料,深入了解电动助力转向系统的基本原理和控制方法;2.动力学模型建立:基于已有的理论研究成果,建立电动助力转向系统的动力学模型;3.仿真分析:利用仿真软件,对电动助力转向系统进行仿真分析,验证模型的准确性和可靠性;4.实验设计:根据仿真结果,设计实验平台,并搭建电动助力转向系统的硬件环境;5.实验研究:开展实验研究,记录实验数据,并进行数据分析;6.总结与展望:根据实验结果和分析,总结出电动助力转向系统的性能特点和优化方向,并对未来的研究提出展望。
简述电动助力转向系统工作原理
电动助力转向系统(Electric Power Steering System,简称EPS)是一种基于电动机驱动的转向系统,通过电子控制单元(Electronic Control Unit,简称ECU)来计算驾驶员的转向指令,并通过电机对转向机构施加力矩,从而实现转向操作。
电动助力转向系统相比传统的液压助力转向系统具有响应更为迅速、节能环保、可靠性较高等优点,在汽车工业中得到了广泛应用。
电动助力转向系统的工作原理可以简述为以下几个步骤:
1. 输入信号
驾驶员通过方向盘转动产生转向指令,这个转向指令由传感器(通常是扭矩传感器)感知并转化成电信号,传递给电子控制单元。
2. 电子控制单元处理
电子控制单元接收到输入信号后,会根据预设的算法和转向的状态进行处理,并确定输出信号,这个输出信号是用来驱动电机的。
3. 电机控制
电子控制单元通过输出信号来驱动电机,控制电机输出适当的力矩,力矩的大小根据驾驶员的转向指令以及车辆的行驶状态来决定。
4. 力矩传递
电机输出的力矩通过转向机构传递给车辆的前轮,产生转向效果。
一般来说,电机输出的力矩是与转向轮的转角成正比的。
5. 系统稳定性控制
电子控制单元还可以根据车辆行驶状况,例如车速、转向角速度等参数进行控制,实现不同工况下的助力控制,以确保系统的稳定性和安全性。
电动助力转向系统通过接收驾驶员的转向指令,经过电子控制单元的处理,通过电机对转向机构施加力矩的方式实现转向操作。
相对于传统的液压助力转向系统,电动助力转向系统具有响应更迅速、能耗更低、可靠性更高的特点,已经成为现代汽车中常见的转向系统。
汽车电动助力转向系统的研究与设计罗苏安;向宝瑜;陈宇;尤虎;杨剑;吴友宇【摘要】描述了电动助力转向系统(EPS)的结构和工作原理,给出了基于MC9S12P64的电子控制单元(ECU)的设计方案,介绍了控制单元、数据采集与处理单元和驱动单元的设计,并完成了控制策略和系统程序设计,对所设计的ECU进行了台架试验和整车试验,结果证明ECU符合设计要求,能够实现在各种行驶工况下提供最佳助力转向的功能.%The structure and mechanism of an electric power steering system (EPS) were introduced. A whole design project ofMC9S12P64 - based electronic control unit( ECU) was presented. And particularly the hardware on controller,current sampling and driving circuit were designed. The control strategies and system programs were proposed. Test - bed experiment and full - car experiment were completed. Based on experimental results, the ECU has been proven effective and can achieve the best power steering function in a variety of driving.【期刊名称】《武汉理工大学学报(信息与管理工程版)》【年(卷),期】2012(034)002【总页数】3页(P190-192)【关键词】电动助力转向;控制策略;台架试验;整车试验【作者】罗苏安;向宝瑜;陈宇;尤虎;杨剑;吴友宇【作者单位】武汉理工大学信息工程学院,湖北武汉430070;武汉理工大学信息工程学院,湖北武汉430070;武汉理工大学信息工程学院,湖北武汉430070;武汉理工大学信息工程学院,湖北武汉430070;武汉理工大学信息工程学院,湖北武汉430070;武汉理工大学信息工程学院,湖北武汉430070【正文语种】中文【中图分类】U463.4;TM921.5随着汽车技术的发展,人们对汽车方向盘转向操纵性能的要求越来越高,既要有适度的转向轻便性,又要满足操纵稳定性[1]。
汽车电动助力转向系统硬件设计摘要:绿色环保背景下电动汽车被提出,电动汽车结构与传统汽车差异较大,其中电动助力转向系统更是具备环保、节能等特性,因此,在对其进行设计时,应注重其与传统转向系统的差异,并着重注意硬件设计。
本文以汽车电动助力转向系统构成为基础,继而提出汽车电动助力转向系统的硬件设计,以供参考。
关键词:电动汽车;转向系统;硬件设计引言:近几年,电动助力转向系统(EPAS)发展迅速,国外已有全新或改进的系统投入使用。
从长远来看,为中小型车配备电动助力转向系统是汽车转向系统发展的一个重要趋势,国内对电动助力转向系统的研究也很重要。
但由于种种原因,国内的研究大多集中在电动助力转向系统的动力学分析和建模上,尚未针对电动助力转向系统种的硬件设计进行探究,为此,有必要在未来发展中对其展开深入剖析。
一、汽车电动助力转向系统构成电动助力转向系统符合现代汽车机电一体化的设计思想,主要由以下部件组成:电子控制单元(FCU)、速度和扭矩传感器、伺服电机、驱动机构和转向柱部件。
关键是电子控制单元,它在很大程度上决定了电动助力转向的控制效率。
电动转向系统的具体支持是:在车辆启动或低速时操作方向盘并将其安装在转向柱上。
扭矩传感器不断检测作用在转向柱上的扭矩,并向电子控制系统发送信号和速度信号。
处理器计算并处理输入信号以确定辅助扭矩的大小和方向,从而控制发动机的电流和方向,并最终为驾驶员提供辅助转向动力。
在如今车流密集化环境内,针对更多不同水平的驾驶人群, 汽车的操纵设计显得尤为重要,如果车速超过某个阈值或发生错误,EPAS将退出支持模式,转向系统将切换到手动转向模式[1]。
二、汽车电动助力转向系统硬件设计1.电机设计(1)EPS系统控制电路的分层设计。
嵌入式EPS系统硬件主要包括整车点火信号、功率监测、扭矩角传感器、转速传感器、负载传感器信号处理、辅助电机驱动和电流反馈、A/D转换、电磁离合器驱动等模块,系统通信和系统错误诊断。