哈工大考研自动控制(参考)
- 格式:ppt
- 大小:4.77 MB
- 文档页数:8
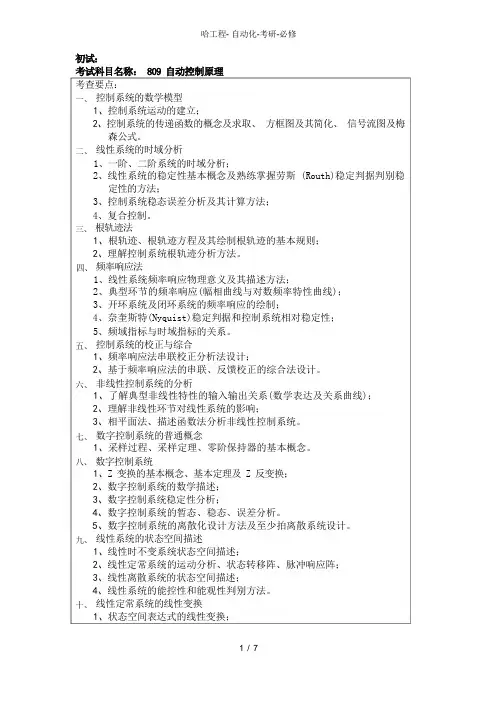
考查要点:一、控制系统的数学模型1、控制系统运动的建立;2、控制系统的传递函数的概念及求取、方框图及其简化、信号流图及梅森公式。
二、线性系统的时域分析1、一阶、二阶系统的时域分析;2、线性系统的稳定性基本概念及熟练掌握劳斯 (Routh)稳定判据判别稳定性的方法;3、控制系统稳态误差分析及其计算方法;4、复合控制。
三、根轨迹法1、根轨迹、根轨迹方程及其绘制根轨迹的基本规则;2、理解控制系统根轨迹分析方法。
四、频率响应法1、线性系统频率响应物理意义及其描述方法;2、典型环节的频率响应(幅相曲线与对数频率特性曲线);3、开环系统及闭环系统的频率响应的绘制;4、奈奎斯特(Nyquist)稳定判据和控制系统相对稳定性;5、频域指标与时域指标的关系。
五、控制系统的校正与综合1、频率响应法串联校正分析法设计;2、基于频率响应法的串联、反馈校正的综合法设计。
六、非线性控制系统的分析1、了解典型非线性特性的输入输出关系(数学表达及关系曲线);2、理解非线性环节对线性系统的影响;3、相平面法、描述函数法分析非线性控制系统。
七、数字控制系统的普通概念1、采样过程、采样定理、零阶保持器的基本概念。
八、数字控制系统1、Z 变换的基本概念、基本定理及 Z 反变换;2、数字控制系统的数学描述;3、数字控制系统稳定性分析;4、数字控制系统的暂态、稳态、误差分析。
5、数字控制系统的离散化设计方法及至少拍离散系统设计。
九、线性系统的状态空间描述1、线性时不变系统状态空间描述;2、线性定常系统的运动分析、状态转移阵、脉冲响应阵;3、线性离散系统的状态空间描述;4、线性系统的能控性和能观性判别方法。
十、线性定常系统的线性变换1、状态空间表达式的线性变换;2、对偶性原理;3、线性系统的结构分解。
十一、李雅普诺夫稳定性分析1、李亚普诺夫意义下运动稳定性的基本概念;2、李亚普诺夫第二法主要定理;3、系统运动稳定性判据。
十二、线性反馈系统的时间域综合1、状态反馈和输出反馈;2、极点配置的设计方法;3、状态观测器的设计;4、状态观测器和状态反馈组合系统。
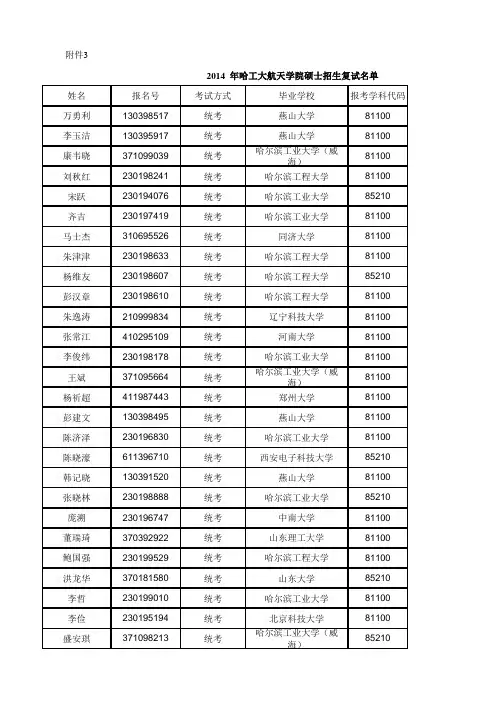
附件32014 年哈工大航天学院硕士招生复试名单姓名报名号考试方式毕业学校报考学科代码万勇利130398517统考燕山大学81100李玉洁130395917统考燕山大学8110081100康韦晓371099039统考哈尔滨工业大学(威海)刘秋红230198241统考哈尔滨工程大学81100宋跃230194076统考哈尔滨工业大学85210齐吉230197419统考哈尔滨工业大学81100马士杰310695526统考同济大学81100朱津津230198633统考哈尔滨工程大学81100杨维友230198607统考哈尔滨工程大学85210彭汉章230198610统考哈尔滨工程大学81100朱逸涛210999834统考辽宁科技大学81100张常江410295109统考河南大学81100李俊纬230198178统考哈尔滨工业大学8110081100王斌371095664统考哈尔滨工业大学(威海)杨祈超411987443统考郑州大学81100彭建文130398495统考燕山大学81100陈济泽230196830统考哈尔滨工业大学81100陈晓濠611396710统考西安电子科技大学85210韩记晓130391520统考燕山大学81100张晓林230198888统考哈尔滨工业大学85210庞溯230196747统考中南大学81100董瑞琦370392922统考山东理工大学81100鲍国强230199529统考哈尔滨工程大学81100洪龙华370181580统考山东大学85210李哲230199010统考哈尔滨工业大学81100李俭230195194统考北京科技大学8110085210盛安琪371098213统考哈尔滨工业大学(威海)李泽辉230194553统考哈尔滨工业大学85210李冬博230193758统考哈尔滨工业大学81100李蒙230192826统考哈尔滨工业大学81100何逵田430496165统考中南大学85210肖为栋360194578统考南昌大学81100郝信420597319统考华中科技大学武昌分校81100钟思会420599391统考武汉科技大学81100王琨宁330199286统考中国计量学院81100朱宁230197860统考哈尔滨工业大学85210都业贵230196418统考郑州大学81100于洋371096571统考山东大学85210马秀秀230194608统考哈尔滨工业大学85210陈思源230198590统考哈尔滨工业大学81100赵为志130391470统考燕山大学81100王晗230198650统考哈尔滨工业大学81100柳光耀230192231统考哈尔滨工业大学81100郑德鹏370287060统考青岛大学81100史帅刚230198813统考哈尔滨工业大学85210杜太磊371096351统考哈尔滨工业大学81100贾二平230195390统考哈尔滨理工大学81100刘军雨131497329统考河北科技大学85210曾祎230192916统考哈尔滨工业大学8110081100陈杰371098486统考哈尔滨工业大学(威海)张海东230197662统考哈尔滨理工大学85210李桂虎230199913统考东北林业大学81100王德章230194802统考哈尔滨理工大学81100常闯370295984统考青岛科技大学85210周之锐230192840统考哈尔滨工业大学85210王宗鹏410496621统考上海大学81100李蒙蒙370294910统考青岛大学81100王少樊230194758统考哈尔滨工业大学85210吕而立130398856统考东北大学秦皇岛分校81100王凯强120495970统考天津理工大学81100赵汉杰230192839统考哈尔滨工程大学8110085210罗文嘉371097711统考哈尔滨工业大学(威海)刘文志370188234统考青岛大学81100陈岩松230199907统考哈尔滨工业大学81100马秋芳130392873统考燕山大学81100张谦230191773统考哈尔滨工业大学85210郑烁120397883统考哈尔滨工业大学81100李栋345798404统考安徽大学81100高怡然230198804统考哈尔滨工程大学85210刘鑫230193795统考哈尔滨工业大学81100李婷230194834统考哈尔滨工业大学81100匡立生230195553统考南京工程学院81100王晓梅230198561统考哈尔滨工业大学81100陈福财230199261统考哈尔滨工程大学8110081100吴雪彬371099013统考哈尔滨工业大学(威海)李硕230198218统考哈尔滨理工大学81100赵雅聪130296441统考河北联合大学81100荣鹏230198673统考哈尔滨工程大学85210李悦230195597统考西南大学81100职光伸611296973统考西北工业大学85210秦野430498357统考中南大学8521081100阴枭雄371097942统考哈尔滨工业大学(威海)罗慕成230198478统考哈尔滨工程大学85210李兴230194107统考辽宁科技大学85210孙园园412096913统考华北水利水电大学8110085210王鑫371098413统考哈尔滨工业大学(威海)李松510699800统考电子科技大学85210姜楷娜214296904统考华中科技大学81100李洪向371394324统考哈尔滨工业大学81100张毅威210899834统考大连海事大学81100李建鹏210797859统考沈阳航空航天大学8110081100曹凯371099255统考哈尔滨工业大学(威海)高亚军230199417统考哈尔滨理工大学81100荣杰345796050统考安徽大学81100马丽娜413099300统考华北水利水电大学81100徐小淇230192603统考哈尔滨工业大学81100栾春雨230195264统考河北工业大学81100陈旭民230196805统考东北林业大学81100程鹏371099250统考哈尔滨工业大学85210郭闪闪413099394统考华北水利水电大学81100刘瑞杰230194810统考哈尔滨工业大学81100张涛230196147统考哈尔滨工业大学85210魏景阳230194619统考哈尔滨工业大学81100刘洋214098048统考大连工业大学85210王江370597137统考中国海洋大学81100马宽红410193686统考河南工业大学81100江彤阳230194956统考哈尔滨工业大学81100卢泽锦230198416统考东北林业大学81100韩顺顺120197737统考辽宁石油化工大学81100剡瑞413097109统考华北水利水电大学81100孙浩然230197384统考哈尔滨工程大学81100李遥为360181095统考哈尔滨工业大学81100商海洋371198204统考曲阜师范大学81100张瑞230199687统考哈尔滨工业大学81100林航清230197667统考哈尔滨工业大学81100李建凯371196093统考河北工程大学81100陈杰230199858统考哈尔滨工业大学81100陈时雨410794806统考安阳工学院81100赵亚兰130395908统考燕山大学81100王玉342497686统考佳木斯大学81100冯奥凯410299619统考河南大学8110081100范德威371098080统考哈尔滨工业大学(威海)芦士光230194071统考电子科技大学81100孟亭亭370292120统考青岛大学8110081100秦绪功230196809统考哈尔滨工业大学(威海)85210王彬371098930统考哈尔滨工业大学(威海)聂隐372997894统考山东大学81100张凝一230192352统考哈尔滨工业大学85210李嘉瑞230196110统考燕山大学81100郭东硕120697195统考河北工业大学81100卢顺130394203统考燕山大学81100徐勇430698264统考长沙理工大学81100王众370187198统考山东大学81100朴宇鹏230194044统考石家庄铁道大学81100何泽强120492451统考天津工业大学8110085210王浩然371099596统考哈尔滨工业大学(威海)张钧宇230197145统考哈尔滨工业大学85210师少龙371095805统考哈尔滨工业大学81100张培烽230197656统考哈尔滨工业大学81100程星振371098089统考哈尔滨工业大学81100易大为230197004统考哈尔滨工业大学85210孙文钊230197202统考哈尔滨工业大学81100容晨峰371096945统考哈尔滨工业大学81100张大成230191554强军计划哈尔滨工业大学81100李达230191933强军计划西安交通大学81100孙辰昕230192026强军计划大连交通大学81100赵芮230192453强军计划装备学院81100李磊230192452强军计划国防科学技术大学81100名单报考学科名称座位号控制科学与工程正心11-1控制科学与工程正心11-2控制科学与工程正心11-3控制科学与工程正心11-4控制工程正心11-5控制科学与工程正心11-6控制科学与工程正心11-7控制科学与工程正心11-8控制工程正心11-9控制科学与工程正心11-10控制科学与工程正心11-11控制科学与工程正心11-12控制科学与工程正心11-13控制科学与工程正心11-14控制科学与工程正心11-15控制科学与工程正心11-16控制科学与工程正心11-17控制工程正心11-18控制科学与工程正心11-19控制工程正心11-20控制科学与工程正心11-21控制科学与工程正心11-22控制科学与工程正心11-23控制工程正心11-24控制科学与工程正心11-25控制科学与工程正心11-26控制工程正心11-27控制科学与工程正心11-29控制科学与工程正心11-30控制工程正心11-31控制科学与工程正心11-32控制科学与工程正心11-33控制科学与工程正心11-34控制科学与工程正心11-35控制工程正心11-36控制科学与工程正心11-37控制工程正心11-38控制工程正心11-39控制科学与工程正心11-40控制科学与工程正心11-41控制科学与工程正心11-42控制科学与工程正心11-43控制科学与工程正心11-44控制工程正心11-45控制科学与工程正心11-46控制科学与工程正心11-47控制工程正心11-48控制科学与工程正心11-49控制科学与工程正心11-50控制工程正心11-51控制科学与工程正心11-52控制科学与工程正心11-53控制工程正心11-54控制工程正心11-55控制科学与工程正心11-56控制科学与工程正心11-57控制科学与工程正心11-59控制科学与工程正心11-60控制科学与工程正心11-61控制工程正心11-62控制科学与工程正心11-63控制科学与工程正心11-64控制科学与工程正心11-65控制工程正心11-66控制科学与工程正心11-67控制科学与工程正心11-68控制工程正心11-69控制科学与工程正心11-70控制科学与工程正心11-71控制科学与工程正心11-72控制科学与工程正心11-73控制科学与工程正心11-74控制科学与工程正心12-1控制科学与工程正心12-2控制科学与工程正心12-3控制工程正心12-4控制科学与工程正心12-5控制工程正心12-6控制工程正心12-7控制科学与工程正心12-8控制工程正心12-9控制工程正心12-10控制科学与工程正心12-11控制工程正心12-12控制工程正心12-13控制科学与工程正心12-14控制科学与工程正心12-15控制科学与工程正心12-16控制科学与工程正心12-17控制科学与工程正心12-18控制科学与工程正心12-19控制科学与工程正心12-20控制科学与工程正心12-21控制科学与工程正心12-22控制科学与工程正心12-23控制科学与工程正心12-24控制工程正心12-25控制科学与工程正心12-26控制科学与工程正心12-27控制工程正心12-28控制科学与工程正心12-29控制工程正心12-30控制科学与工程正心12-31控制科学与工程正心12-32控制科学与工程正心12-33控制科学与工程正心12-34控制科学与工程正心12-35控制科学与工程正心12-36控制科学与工程正心12-37控制科学与工程正心12-38控制科学与工程正心12-39控制科学与工程正心12-40控制科学与工程正心12-41控制科学与工程正心12-42控制科学与工程正心12-43控制科学与工程正心12-45控制科学与工程正心12-46控制科学与工程正心12-47控制科学与工程正心12-48控制科学与工程正心12-49控制科学与工程正心12-50控制科学与工程正心12-51控制工程正心12-52控制科学与工程正心12-53控制工程正心12-54控制科学与工程正心12-55控制科学与工程正心12-56控制科学与工程正心12-57控制科学与工程正心12-58控制科学与工程正心12-59控制科学与工程正心12-60控制科学与工程正心12-61控制工程正心12-62控制工程正心12-63控制科学与工程正心12-64控制科学与工程正心12-65控制科学与工程正心12-66控制工程正心12-67控制科学与工程正心12-68控制科学与工程正心12-69控制科学与工程正心12-70控制科学与工程正心12-71控制科学与工程正心12-72控制科学与工程正心12-73。
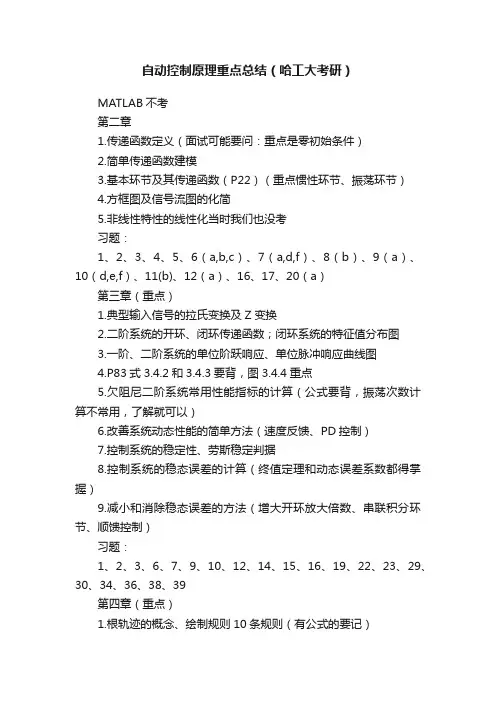
自动控制原理重点总结(哈工大考研)MATLAB不考第二章1.传递函数定义(面试可能要问:重点是零初始条件)2.简单传递函数建模3.基本环节及其传递函数(P22)(重点惯性环节、振荡环节)4.方框图及信号流图的化简5.非线性特性的线性化当时我们也没考习题:1、2、3、4、5、6(a,b,c)、7(a,d,f)、8(b)、9(a)、10(d,e,f)、11(b)、12(a)、16、17、20(a)第三章(重点)1.典型输入信号的拉氏变换及Z变换2.二阶系统的开环、闭环传递函数;闭环系统的特征值分布图3.一阶、二阶系统的单位阶跃响应、单位脉冲响应曲线图4.P83式3.4.2和3.4.3要背,图3.4.4重点5.欠阻尼二阶系统常用性能指标的计算(公式要背,振荡次数计算不常用,了解就可以)6.改善系统动态性能的简单方法(速度反馈、PD控制)7.控制系统的稳定性、劳斯稳定判据8.控制系统的稳态误差的计算(终值定理和动态误差系数都得掌握)9.减小和消除稳态误差的方法(增大开环放大倍数、串联积分环节、顺馈控制)习题:1、2、3、6、7、9、10、12、14、15、16、19、22、23、29、30、34、36、38、39第四章(重点)1.根轨迹的概念、绘制规则10条规则(有公式的要记)2.特殊根轨迹(与负反馈跟轨迹对比记忆),参数根轨迹3.基于根轨迹法的校正(重点)(幅角条件重点)(过程及公式需要记)(附加开环零点(PD 控制)、串联超前校正、串联迟后校正、串联超前—迟后校正(一般不会考,太复杂)、反馈校正(移动不希望开环极点))习题:1、2、3、5、6、7、8、9、11、14、15、16、17第五章(重点)(我们当时给Bode图求传递函数是必考的)1.典型环节的频率特性图(Nyquist图、Bode图、渐近Bode图)(Nichols图不考)2.控制系统开环Nyquist图、开环渐近Bode图的粗略画法3.非但未反馈系统的闭环频率特性不考(P226的5.3.5)4.Nyquist判据(根据Nyquist图判定、根据Bode图判定)5.稳定裕度——图示(由Nyquist图计算;由Bode图的计算)及具体计算(相角裕度、幅值裕度)6.怎样根据系统的开环Bode图计算开环放大倍数及稳态误差7.二阶系统开环频域指标与闭环动态性能指标的关系(教材中p.246的式(5.8.2)、p.246的式(5.8.1))8.高阶系统的经验公式(教材中p.249的式(5.8.7)、p.249的式(5.8.8))9.教材P251的5.9.4,P252的5.9.8,5.9.9,加个公式1sin Mγγ=10.基于频率法的校正(过程及公式需要记下来)(串联超前校正、串联迟后校正、串联迟后—超前校正、希望频率特性法校正、局部反馈校正(移动不希望折点))习题:2、3、4、5、7、8、12、14、16、18、20、21、27、34、35、36、37、38、40、41、42、43、46、49第六章1.采样定理(Shannon定理)2.零阶保持器(ZOH)的传递函数及频率特性(P291公式6.3.2)3.常用输入信号的Z变换与反变换(教材p295表6.4.1的前5行及倒数第3行)4.离散系统脉冲传递函数的求取(带有零阶保持器的为重点)5.离散系统的稳定性定理(|z|<1)(劳斯稳定判据w变换)6.数字控制系统模拟化设计的条件(设计条件不考)7.数字控制系统离散化设计的基本思路(章节6.10.2和6.10.3不考)8.数字PID不考9.最少拍无差系统的设计理念、优缺点(P334公式6.10.5,6.10.6)习题:1、2、4、7、9、11、18、21第七章1.典型非线性环节数学表达式的写法2.相轨迹图的概念、作图方法——等倾线法(章节7.4.1不考)(章节7.4.3重点)(回画等倾线)3.用相平面法分析非线性系统4.极限环与线性系统临界稳定状态的区别5.如何通过描述函数法计算非线性系统自持振荡(极限环)的振幅和角频率6.P414图7.6.10重点,例7.6.2重点。
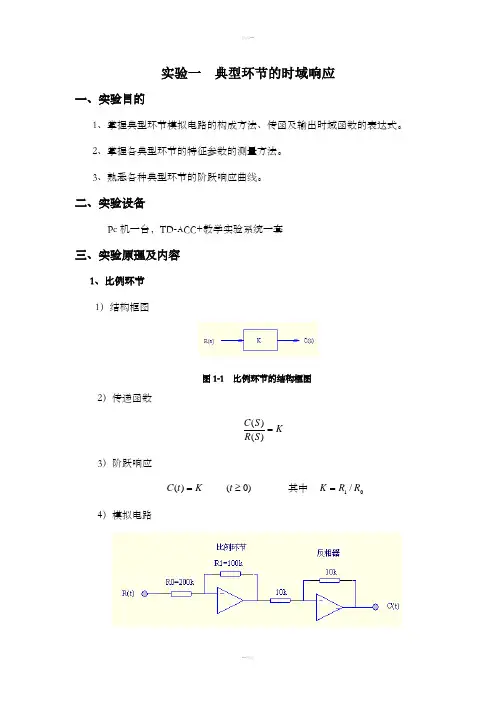
实验一 典型环节的时域响应一、实验目的1、掌握典型环节模拟电路的构成方法、传函及输出时域函数的表达式。
2、掌握各典型环节的特征参数的测量方法。
3、熟悉各种典型环节的阶跃响应曲线。
二、实验设备Pc 机一台,TD-ACC+教学实验系统一套三、实验原理及内容1、比例环节 1)结构框图图1-1 比例环节的结构框图2)传递函数K S R S C =)()( 3)阶跃响应K t C =)( )0(≥t 其中 01/R R K =4)模拟电路图1-2 比例环节的模拟电路图注:图中运算放大器的正相输入端已经对地接了100k 电阻。
不需再接。
2、积分环节1)结构框图图1-3 积分环节的结构框图2)传递函数TSS R S C 1)()(= 3)阶跃响应t Tt C 1)(=)0(≥t 其中 C R T 0= 4)模拟电路图1-4 积分的模拟电路图3、比例积分环节1)结构框图图1-5 比例积分环节的结构框图2)传递函数 TSK S R S C 1)()(+= 3)阶跃响应t TK t C 1)(+= )0(≥t 其中 01/R R K = ;C R T 0= 4)模拟电路图1-6 比例积分环节的模拟电路图4、惯性环节1)结构框图图1-7 惯性环节的结构框图2)传递函数3)阶跃响应)1()(/T t e K t C --= 其中 01/R R K = ;C R T 1=4)模拟电路图1-8 惯性环节的模拟电路图四、实验步骤1、按图1-2比例环节的模拟电路图将线接好。
检查无误后开启设备电源。
2、将信号源单元的“ST ”端插针与“S ”端插针用“短路块”。
将信号形式开关设在“方波”档,分别调节调幅和调频电位器,使得“OUT ”端输出的方波幅值小于5V ,周期为10s 左右。
3、将方波信号加至比例环节的输入端R (t ),用示波器的“CH1”和“CH2” 表笔分别监测模拟电路的输入R (t )端和输出C(t)端。
记录实验波形及结果。


【关键字】系统Harbin Institute of Technology课程设计论文课程名称:自动控制元件及线路设计题目:捡乒乓球机器人小车的设计院系:航天学院控制科学与工程系班级:1304105班设计者:杨明阳01徐云飞02姚晨蔚16指导教师:马广程设计时间:2016年3-5月捡乒乓球机器人小车摘要:随着科学技术的日益发展,越来越多的科技被应用在了生活的方方面面。
当然也包括运动赛场上,帮助选手以及裁判解决一部分的麻烦,使得比赛进行的更加流畅。
这里为解决乒乓球比赛上乒乓球的捡取问题,设计了一种以单片机作为主控制器的自动捡球机器人。
该捡球机器人采用风扇产生的吸力来实现捡球;利用超声波传感器实现对乒乓球的自动识别;通过红外传感器监测周围环境,实现自动躲障。
本系统会在裁判对每一个球做出判决后开始工作,先按照预定路线绕场地前进,同时在行进过程中利用传感器寻找掉落的小球。
当找到目标并确认后,改变预定路线转而向目标前进,最终捡起乒乓球,之后再回到原点。
完成捡球功能,保证比赛的连续性。
关键词:捡乒乓球机器人超声波传感器红外传感器过程控制目录1.功能设计----------------------------------------------------------42.系统的性能指标和技术要求------------------------------------------43.背景及意义--------------------------------------------------------44.系统的总体结构与设计方案------------------------------------------54.1 预定路线前进---------------------------------------------------64.2 目标寻找-------------------------------------------------------74.3 捡起目标乒乓球-------------------------------------------------94.4 判断乒乓球是否捡起---------------------------------------------94.5 绕开障碍-------------------------------------------------------94.6 返回原点------------------------------------------------------105.执行元件---------------------------------------------------------105.1 行进电机的选择------------------------------------------------105.1.1 直流伺服电机结构-------------------------------------------105.1.2 直流伺服电机驱动原理---------------------------------------115.1.3 直流伺服电机的分类及特点-----------------------------------115.1.4 指标的计算和直流伺服电机的选择-----------------------------125.1.5 直流伺服电机调速-------------------------------------------15直流伺服电机调速原理------------------------------------15直流速度控制方式----------------------------------------155.2 捡球装置的选择------------------------------------------------225.2.1 捡球原理级实现---------------------------------------------235.2.2 吸球管设计-------------------------------------------------246.测量元件---------------------------------------------------------266.1 测速传感器的选取----------------------------------------------266.1.1 三种传感器的对比分析---------------------------------------266.1.2 对光电编码器的论证分析和选取-------------------------------286.2 位置和躲障传感器的选取----------------------------------------346.2.1 常用传感器及特点-------------------------------------------346.2.2 根据超声传感器实现定位和物体识别---------------------------366.2.3 根据红外感器实现障碍躲躲-----------------------------------416.3 根据红外传感器实现捡球信号的反馈------------------------------446.4 传感器设计中的缺陷及可改进的地方------------------------------456.4.1 传感器设计中的缺陷-----------------------------------------456.4.2 传感器设计中可改进的部分-----------------------------------457.单片机-----------------------------------------------------------467.1 常用单片机----------------------------------------------------467.2 单片机选型----------------------------------------------------477.3 所选单片机特点及可行性----------------------------------------478.系统硬件清单-----------------------------------------------------489.自评-------------------------------------------------------------48 9.1 优点----------------------------------------------------------489.2 缺点以及不足--------------------------------------------------4910.分工------------------------------------------------------------4911.心得体会--------------------------------------------------------50参考文献-----------------------------------------------------------50一、功能设计1.裁判做出判决后自行定位乒乓球掉落位置2.迅速移动至掉落乒乓球所在位置3.捡起乒乓球,并回到起点4.行进过程中躲避场地选手以及其他人员或障碍5.利用尺寸确认目标乒乓球二、系统的性能指标和技术要求1.机器人移动至乒乓球顶点位置精度±3cm2.机器人移动速度≤2 m/s3.紧急刹车时间≤0.3s4.总捡球时间≤21s5.判断乒乓球是否捡起6.能够辨认出乒乓球和障碍物三、背景及意义随着人们对机器人技术智能化本质认识的加深,机器人技术开始源源不断地向人类活动的各个领域渗透。
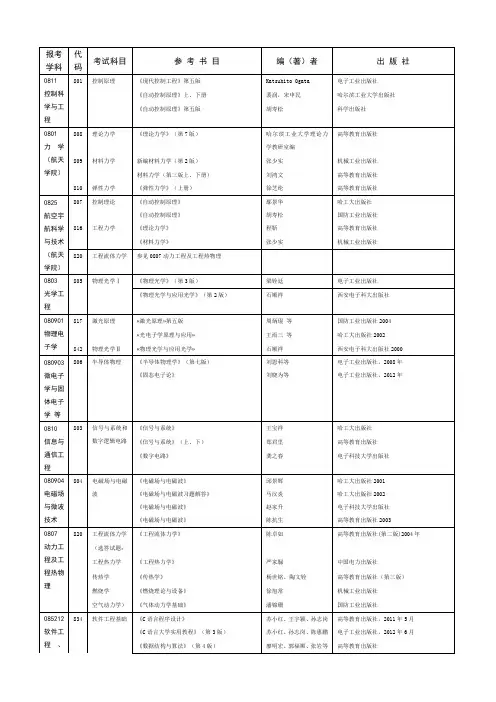
主要学校自动控制原理考研教材
1、华南理工大学
《自动控制原理》高国燊、余文烋编,华南理工大学出版社2005年第二版;《自动控制原理学习指导与精选题型详解》陈来好、彭康拥编,华南理工大学出版社2004年1月;《现代控制理论》(第二版)刘豹主编,机械工业出版社或《线性系统理论基础》尤昌德编,电子工业出版社
2、华中科技大学
胡寿松主编《自动控制原理》,国防工业出版社
3、北京工业大学
孙亮,杨鹏.《自动控制原理》.北京工业大学出版社,2006.
4、电子科技大学
李友善主编《自动控制原理》,国防工业出版社
5、哈尔滨工业大学
1)801控制原理
2)807控制理论
《自动控制原理》鄢景华哈工大出版社
《自动控制原理》胡寿松国防工业出版社
6、重庆大学
1)839自动控制原理一(控制理论与控制工程专业)
《自动控制原理》学校自编教材或梅晓榕主编《自动控制原理》科学出版社出版2004年3月1日出版
2)844自动控制原理二(电气工程、控制科学与工程专业)
《自动控制原理》涂植英主编重庆大学出版社《自动控制原理》胡寿松主编科学出版社(第四版)
7、华东理工大学
8、长沙理工大学
《自动控制原理》,李益华主编,湖南大学出版社,2010年《现代控制理论》,黄辉先主编,湖南大学出版社,2006年
9、广东工业大学
胡寿松,自动控制原理,科学出版社,2002。
哈工大 2007 年 秋 季学期自动控制元件及线路试 题题号 一 二 三 四五 六 七 八 九 十 卷面分 平时分 总分 满分值 20 20 810 20 10 12 得分值班学号 姓名一.(20分) 1.两台完全相同的永磁直流电动机的轴连在一起组成电动机-发电机组。
每台电机,电阻8a R =Ω,电感0.02H a L =,转动惯量32210kg m J -=⨯⋅。
(1)电动机电压120V m U =,电流10.25A m I =。
发电机不接负载,此时机组转速120rad/s ω=。
求发电机电枢电压1g U 和每台电机的空载阻转距f T 。
(2)电动机电压230V m U =,发电机电枢端接负载电阻160L R =Ω。
求机组转速2ω,电动机电流2m I ,发电机电枢电流2g I 。
(3)求电机本身的机电时间常数m τ、电磁时间常数e τ和传递函数(转角为输出量)。
2.输入信号是电枢电压a u ,输出信号是电机转角θ。
绘出直流电动机动态框图,标出)(s I a ,),(),(s T s E em a 及扰动力矩)(s T c 。
3.绘出直流电动机电枢控制的 机械特性曲线,标出理想空载 转速和堵转转矩,标出电动机、 发电机和反接制动状态。
4.在右侧3条去磁曲线上添写适当的材料名称。
5.为了获得大转矩,直流力矩电机电枢形状为( )。
设电枢体积、磁密、电流和导线总长度不变,用物理知识给予解释。
6.直流电机电枢绕组一般放在定子上还是转子上? 为什么这么安排?二.(20分)1.绘出异步电动机的等效电路并说明如何利用等效电路求电机电磁转矩。
2. 电机绕组通入交流电t I i ωsin 2=。
单相集中绕组产生( )磁场。
任一固定时刻,磁势在空间的分布波形是什么形状?( )。
单相分布绕组产生( )磁场。
任一时刻磁势在空间的分布波形是什么形状?( ) 注:磁场(椭圆旋转,圆形旋转,脉振,其它);分布波形(正余弦波,方波,阶梯波,三角波,其它)3. 一台三相异步电机额定转速是940r/min ,这是几极电机?说明理由并求转差率。
最新哈⼯⼤研究⽣⼊学复试(⾯试)题库(控制科学与⼯程相关专业)⼀、1.时域闭环系统的动态性能指标都有哪些?(请具体描述三个Tr tp ts td 超调量2.时域闭环系统的稳态性能指标都有哪些?(解答出3种)稳态误差3.分析时域系统稳定的充分必要条件是什么参数。
(举例说明)所有的闭环特征根均具有负实部4.分别说出系统的开环传递函数和闭环传递函数是如何定义的。
传递函数的定义是线性定常系统输出拉式变换与输⼊拉式变换之⽐,开环指断开主反馈回路。
5.时域系统稳定的充分必要条件是什么?(注:⽤ζ解答)ζ要⼤于0⼩于16.如何⽤劳斯判据判断系统的稳定性,并简述该⽅法的优点。
第⼀列均为正数则是稳定的。
不必求解⽅程就可以判定⼀个多项式⽅程中是否存在位于复平⾯右半部的正根。
7.如何应⽤劳斯(Routh)稳定性判据来判别系统的稳定性?同上8.在时域中,⼆阶系统稳定的充分必要条件是什么?(提⽰:⽤阻尼⽐的概念解答)阻尼⽐⼤于0,ζ>0.9.应⽤根轨迹⽅法分析在什么情况下系统稳定?⽆论K为何值,其特征根始终位于复平⾯的左半平⾯。
10.应⽤什么⽅法能使被控系统的频带加宽,加宽中频带对系统的性能有什么影响?可串联超前校正补偿原系统中频段过⼤的负相⾓。
加宽中频带可以保证系统具有适当的相⾓裕度。
11.简述绘制常规根轨迹的⼋条规则。
1)根轨迹的起点和终点:根轨迹起始于开环极点,终⽌于开环零点。
K=0的点称为g→∞的点称为终点。
起点,Kg2)根轨迹的分⽀数与开环有限零点数m和有限极点数n中的⼤者相等,它们连续且对称于实轴。
3) 当极点数n ⼤于零点数m 时,有(n-m)条根轨迹分⽀沿着与实轴交⾓为a ?、交点为a σ的⼀组渐近线趋向于⽆穷远处,且有 4) 实轴上的某⼀区域,若其右边开环实数零、极点个数为奇数,则该区域必是根轨迹。
5) 根轨迹的分离点,两条或两条以上根轨迹分⽀在s 平⾯上相遇⼜⽴刻分开的点。
坐标是下列⽅程的解:1111mn i j i j d z d p ===--∑∑11n m j ij i a p z n m σ==-=-∑∑6) 根轨迹的起始⾓与终⽌⾓。
哈工大自动控制原理哈工大自动控制原理引言•自动控制原理(Automatic Control Principle)是指利用控制系统对被控对象进行调节、管理和控制的学科。
它广泛应用于各个领域,如机械、电子、航空、化工等。
什么是自动控制原理•自动控制原理是一门研究如何设计、分析和改进控制系统的学科。
它主要研究控制系统的建模、控制方法和控制理论。
控制系统的基本组成•控制系统由四个基本组成部分构成:1.被控对象(Plant):也称为系统,在自动控制中是需要被控制的物理实体或过程。
2.传感器(Sensor):用于测量被控对象的状态或输出信号,并将其转换成电信号。
3.执行机构(Actuator):根据控制器的输出信号,将电信号转换成对被控对象施加的作用力、功率等。
4.控制器(Controller):基于传感器测量值,计算出控制器输出信号,并将其发送给执行机构。
自动控制的基本原理•自动控制的基本原理是建立在数学模型和控制方法上的。
其主要包括以下几个方面:1.系统建模:将被控对象的动态特性转化成数学方程。
常见的建模方法有传递函数法、状态空间法等。
2.稳定性分析:通过数学分析和计算,确定控制系统在各种工况下是否稳定。
常见的稳定性分析方法有根轨迹法、频域法等。
3.控制器设计:基于系统模型和稳定性要求,设计出适合的控制器。
常见的控制器设计方法有比例积分微分控制器(PID)方法、模糊控制方法等。
4.闭环控制:将测量信号通过反馈路径返回给控制器,以实现对被控对象的控制。
闭环控制可以提高系统的稳定性和鲁棒性。
自动控制在工程中的应用•自动控制在工程中有着广泛的应用,以下是一些常见的应用领域:1.工业自动化:包括工厂自动化、流水线控制、机器人控制等。
2.交通运输:包括交通信号灯控制、自动驾驶等。
3.航空航天:包括飞行控制、导航系统等。
4.电力系统:包括发电厂控制、电网调度等。
5.化工过程:包括化工生产、反应控制等。
结语•自动控制原理作为一门学科,研究如何设计和改进控制系统。