计算方法_第七章
- 格式:ppt
- 大小:838.00 KB
- 文档页数:40

第七章 波浪理论及其计算原理在自然界中;常可以观察到水面上各式各样的波动,这就是常讲的波浪运动,它造成海洋结构的疲劳破坏,也影响船的航行和停泊的安全。
波浪的动力作用也常引起近岸浅水地带的水底泥沙运动,致使岸滩崩塌,建筑物前水底发生淘刷,港口和航道发生淤积,水深减小,影响船舶的通航和停泊。
为了海洋结构物、驾驶船舶和船舶停靠码头的安全,必须对波浪理论有所了解。
一般讲,平衡水面因受外力干扰而变成不平衡状态,但表面张力、重力等作用力则使不平衡状态又趋于平衡,但由于惯性的作用。
这种平衡始终难以达到,于是,水体的自由表面出现周期性的有规律的起伏波动,而波动部位的水质点则作周期性的往复振荡运动。
这就是波浪现象的特性。
波浪可按所受外界的干扰不同进行分类。
由风力引起的波浪叫风成波。
由太阳、月亮以及其它天体引起的波浪叫潮汐波。
由水底地震引起的波浪叫地震水波由船舶航行引起的波浪叫船行波。
其中对海洋结构安全影响最大的是风成波。
风成波是在水表面上的波动,也称表面波。
风是产生波动的外界因素,而波动的内在因素是重力。
因此,从受力的来看;称为重力波。
视波浪的形式及运动的情况,波浪有各种类型。
它们可高可低,可长司短。
波可是静止的一一驻波(即两个同样波的相向运动所产生的波,也可以是移动的——推进波以一定的速度将波形不变地向一个方向传播的波),可以是单独的波,也可以是一个接一个的一系列波所组成的波群。
§7-1 液体波动理论一、流体力学基础1、速度场 描述海水质点的速度随空间位置和时间的变化规律的一个矢量。
),,,(t z y x V V =它的三个分量为:x 方向的量:),,,(t z y x u u =y 方向的量:),,,(t z y x v v =z 方向的量:),,,(t z y x w w =2、速度势 对于作无旋运动的液体,存在一个函数,它能反映出速度的变化,但仅仅是反映速度大小的变化,这个函数称为速度v的势函数,简称速度势: ),,,(t z y x φφ=3、速度与速度势的关系x u ∂∂=φ, y v ∂∂=φ, zw ∂∂=φ 二、海水运动的基本假设1、海水无粘性,只有重力是唯一的外力;2、液体自由液面上的压力为常数;3、液体波动振幅相对于波长为无限小;4、液体作无旋运动。
第七章产品成本计算的基本方法——分批法本章思维导图课题产品成本计算的分批法课时6课时(270min)教学目标知识技能目标:1.掌握分批法的特点、适用范围、计算程序和计算方法2.掌握简化分批法的应用条件、基本生产二级帐的作用以及在生产费用分配上的特点。
素质目标:培养学生的辩证思维和逻辑思维能力,培养学生在国家先进制造战略下将所学知识应用到实践问题分析中,做到学以致用。
教学重难点教学重点:分批法的概念及适用范围,简化分批法的概念和特点教学难点:分批法和简化分批法的成本计算程序教学方法讲授法、问答法、案例分析法、讨论法教学用具电脑、投影仪、多媒体课件、教材教学设计第1节课:考勤(2 min)→传授新知(28 min)→课堂讨论(15 min)第2节课:问题导入(5 min)→传授新知(20 min)→课堂练习(15 min)→课堂小结(3 min)→作业布置(2 min)教学过程主要教学内容及步骤设计意图第一节课问题导入 【教师】提出问题:通过问题导入现代环境下怎样的企业适合用分批法法?与品种法有何区别?⏹【学生】思考、分组讨论并回答⏹【教师】通过学生的回答引入新课题:产品成本计算的分批法,引导学生思考分批法的概念,及其与品种法的区别,激发学生的学习兴趣传授新知⏹【教师】讲解分批法的概念、适用范围、特点、成本计算程序和简化分批法一、分批法的概念及适用范围分批法也称订单法,是以产品的批别或订单作为成本计算对象,归集和分配生产费用、计算产品成本的方法。
这种方法主要适用于小批、单件,管理上不要求分步骤计算成本的多步骤企业,如精密仪器、专用设备、重型机械和船舶制造企业,也可用于新产品的试制、机器设备修理、来料加工和辅助生产的工具模具制造企业等。
【教师】播放视频“分批法”(详见教材),帮助学生了解分批法【学生】观看、思考、理解二、分批法的特点(一)成本计算对象分批法是以产品的批别作为成本计算对象,这也是它区别于其他成本计算方法的最重要特征。

第七章 框架-剪力墙结构在水平荷载下的近似计算方法 本章导学框架:剪力墙结构是由框架和剪力墙组成的一种复合结构体系,它兼 具框架结构和剪力墙结构的优点,因而成为高层建筑的主要结构体 系。
在水平荷载作用下,因为框架与剪力墙的变形性质不同,不能 直接把总水平剪力按抗侧刚度的比例分配到每榀结构上,而是必须 采用协同工作方法求得侧移和各自的水平层剪力及内力。
框架剪力墙结构计算的近似方法是将结构分解成平面结构单元,它适用 于比较规则的结构,而且只能计算平移时的剪力分配,如果有扭转 ,要单独进行扭转计算,再将两部分内力叠加。
这种方法概念清楚 ,结果的规律性较好。
本章主要学习框架:剪力墙结构计算的近似方法,学习中要求同学们熟练掌握协同 工作方法的两种计算简图,熟练掌握铰接体系和刚接体系的计算方 法的区别与联系。
知识学习第一节 概述一.基本假定框剪结构体系在水平荷载作用下的内力分析是一个三维空间超 静定问题,通常把它简化为平面结构来计算,并在结构分析中作如 下基本假定:①楼板在自身平面内刚度无限大。
这一假定保证楼板将整个计 算区段内的框架和剪力墙连成一个整体,在水平荷载作用下,框架 和剪力墙之间不产生相对位移。
②当结构体型规则、剪力墙布置比较对称均匀时,结构在水平 荷载作用下不计扭转的影响;否则应考虑扭转的影响。
③不考虑剪力墙和框架柱的轴向变形及基础转动的影响。
④结构为线弹性结构。
二.计算简图用连续化解法求总剪力墙与总框架之间的相互作用力,都要解 决如何合并总剪力墙、总框架,以及确定总剪力墙和总框架之间的 连接和相互作用关系,以便于确定计算简图。
框剪结构用连续化方 法求解时,根据连杆刚度情况可以确定两种计算简图:铰接体系和 刚接体系。
1.铰接体系在基本假定的前提下,计算区段内结构在水平荷载作用下,处 于同一楼面标高处各片剪力墙及框架的水平位移相同。
此时可把平 行于水平荷载作用方向的所有剪力墙综合在一起成总剪力墙(一般 简化为整体墙),把平行于水平荷载作用方向的所有框架综合在一 起成总框架。
计算方法引论:数值代数⏹解线性方程组的直接法⏹解线性方程组最小二乘问题⏹解线性方程组的迭代法⏹矩阵特征值和特征向量的计算⏹非线性方程及非线性方程组解法第七章线性方程组最小二乘问题•线性最小二乘问题•满秩分解•广义逆矩阵•Gram-Schmidt方法•Householder变换•Givens变换•奇异值分解线性最小二乘问题•线性代数方程组Ax=b(1)–相容:有解, 可能有无穷多解(欠定).–不相容(矛盾,超定):无解.–广义解:最小二乘解.总存在,可能有无穷多.•最小二乘解–求剩余平方和║Ax -b ║2的最小值点–求正规方程(法方程)A T Ax =A T b (通常意义)的解–二者等价:象数据拟合法那样用微分法可得⎪⎪⎩⎪⎪⎨⎧=+++=+++=+++mn mn m m n n n n b x a x a x a b x a x a x a b x a x a x a 22112222212111212111满秩分解与广义逆矩阵•满秩矩阵:A,rank(A)=min{m,n}m×n–行满秩:A,rank(A)=mm×n–列满秩:A,rank(A)=nm×n•满秩分解A= B m×r A r×n,rank(A)=rm×n–(不惟一)可取A的线性无关列为B,它们表出A各列的系数对应为C•广义逆矩阵(惟一)–A+=C T(CC T)-1(B T B)-1B T•注:广义逆矩阵可多个方式定义并确认其惟一性.似乎用奇异值分解更简明实用A+计算•满秩矩阵–行满秩: A+=A T(AA T)-1–列满秩: A+=(A T A)-1A T •非零向量–行向量:x=(x1,x2 ,…,x n)x +=x T/(x12+…+x n2)–列向量x=(x1, x2,…,x n) Tx +=x T/ (x12+…+x n2) •例[][]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=-⨯⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=-⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡--=21211012151112111212211AA +计算又例•A 作满秩分解消元所有列都用1、3列表出131042611713013⎛⎫⎪= ⎪ ⎪⎝⎭A 0.0535710.0178570.0714290.160710.0535710.214290.369050.0119050.380950.422620.0297620.452380.208330.0416670.16667+-⎛⎫⎪- ⎪⎪=-- ⎪- ⎪ ⎪-⎝⎭A 消元矩阵解释•求A +–·–·1–·1131040011100000⎛⎫⎪--⎪ ⎪⎝⎭131040011100111⎛⎫⎪-- ⎪⎪--⎝⎭ ③–②·1 ②–①·2 ③–①·1 1113013210011110⎛⎫⎛⎫⎪=⎪⎪-⎝⎭⎪⎝⎭A 100131042100011111100*********4210011111⎛⎫⎛⎫ ⎪⎪=-- ⎪⎪ ⎪⎪⎝⎭⎝⎭⎛⎫⎛⎫ ⎪= ⎪ ⎪--⎝⎭ ⎪⎝⎭AA+性质•X=A+满足Penrose方程–AXA=A(P1)–XAX=X(P2)–(AX)T=(AX)(P3)–(XA)T=(XA)(P4)•性质–A可逆A+=A-1–(A T)+= (A+)T–(A T A)+=A+(A T)+–(A+A)2=A+A,(AA+)2=AA+•注:不具有逆的某些性质[][]2222))(())((乃知)(1141))(()()()(故2/1)()(,1)(1121)()()(1)(,1121)(,01,11++++++++++++++≠=⎥⎦⎤⎢⎣⎡=≠==⎥⎦⎤⎢⎣⎡==⎥⎦⎤⎢⎣⎡===⎥⎦⎤⎢⎣⎡=xyxyxyxyxyyxyxyxyxxyxyyxyx方程组(1)的解•方程组(1)有解iff AA+b=b–充分性:AA+b=b,则x=A+b满足(1)–必要性:有Ax=b即有AA+(Ax)=b, AA+b=b •(1)有解则其通解为(2)x=A+b+(I-A+A)z, z任意n维向量–(1)有解则A+b是解而A(I-A+A)=A-AA+A=O–设y是解.令z=y-A+b则Az=o.于是z=(I-A+A)z,从而y=A+b+z=A+b+(I-A+A)z.方程组(1)的解(续)•(1)有解时A+b为其通解(2)中惟一2-范数最小者.一般情况下(1)的最小二乘解通解亦(2), A+b仍为其通解中惟一2-范数最小者–(1)有解通解是(2).由于(A+)T(I-A+A)=(A+)T (A+A)T(I-A+A)=(A+)T (A+A-A+A)=O.得║x ║2 = ║A+b║2+║(I-A+A)z║2 +(A+b)T(I-A+A)z= ║A+b║2+║(I-A+A)z║2>0,当(I-A+A)z≠o–一般情况下.令b=c+d, c=AA+b,d=(I-AA+)b,则c T d=0,A T d=o,Ax=c有解y=A+c+(I-A+A)z=A+b+(I-A+A)z,且║b-Ax║2=║c+d-Ax║2 =║c-Ax║2 +║d║2 > ║d║2 ,当Ax≠c.乃证得(1)的最小二乘解通解亦(2).其中A+b为惟一2-范数最小者前己证得.Gram-Schmidt 正交化•G-S 方法可将线性无关的向量组正交化–β1=α1, r 11=║β1║,q 1=β1/r 11–β2=α2-r 12q 1, r 12=(α2, q 1), r 22=║β2║,q 2=β2/r 22–βk =αk -r 1k q 1 -r 2k q 2 -…-r k-1,,k q k , r ik =(αk , q i ), i =1,2, …,k -1, r kk =║βk ║, q k =βk /r kk , k =3, …,n•矩阵表示–A=QR–(α1α2 …αn )=(q 1q 2…q n )⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡nn n n r r r r r r22211111•G-S 方法•修改的G-S 方法–后一算法改变原算法:算出后立即修改使之皆与正交,以后对它们逐个作类似处理.–二算法主要运算量是乘法和加法运算各mn 2次1112/||||=βααfor j = 2:nT T T 112211j j j j j j j --=----βαβαββαββαβ 2/||||j j j =βββ endfor j = 1:n2/||||j j j =βαα for k = j +1:nT k k j k j =-ααβαβ endend1β211,,,n j j j =-:ααααβαβ211,,,2,3,,.n j j j j n =-=:ααααβαβT 211,,,2n j j j j =-=:ααααβαβ1β•A =QR•各列正交化过程5251103202230012---⎛⎫⎪-⎪= ⎪- ⎪-⎝⎭A 0.980580.0377430.176600.0764720.196120.188710.883020.3823600.981310.176600.07647200.397360.91766-⎛⎫⎪-- ⎪= ⎪⎪-⎝⎭Q 5.0990 1.9612 5.49130.588350 2.0381 1.5852 2.528800 2.5166 3.267200.76472---⎛⎫⎪- ⎪=⎪- ⎪⎝⎭R T T 22121(0.076923,0.38462,2,0)=-=-βαβαβ22|||| 2.0381=βT 2(0.037743,0.18871,0.98131,0)=-βT T13235.4913, 1.5852=-=βαβαT T T33131232(0.44444,2.2222,0.44444,1)=--=-βαβαββαβ32|||| 2.5166=βT3(0.17660,0.88302,0.17660,0.39736)=-β-3.2672T4(0.058480,0.29240,0.058480,0.70175)=---β42||||0.76472=βT4(0.076472,0.38236,0.076472,0.91766)=--β12|||| 5.0990=αT1(0.98058,0.19612,0,0)=βT 12 1.9612=-βαT T T 1424340.58835, 2.5288,0.32672=-=-=-βαβαβαHouseholder 变换•定义–H =I -2ww T , ║ w ║ =1•性质–H T =H–H T H =H 2=I–任一x ,║Hx ║=║x ║–任给x 及y ,║y ║=║x ║≠0,总有H 使Hx=y , 不难验证:取w =(x-y )/ ║x-y ║即可.–y 常取坐标轴方向,如y = -sign(x 1 )║x ║ e 1v =x +sign(x 1)║x ║ e 1(w =v / ║v ║)H =I -βvv T ,β=2/v T v用此变换可将矩阵化成上三角(消元)Household变换:算法•变换Hx= -αe1:计算v(存入x)及α=sign(x1)║x║,β–η=max{|xi|}计算v及β时引入的比例因子–xi=x i/η, 1≤i≤n–α= sign(x1)║x║–x1=x1+α, β =(αx1)-1, α= ηα•计算A=HA(H由β,v给出)–设A=(a1… aq)则HA=A-βvv T A=(…a j -βvv T a j…)–算法:对j=1,2,…,qσ=v T aja j =a j -σβv•由此不难导出化上三角的算法Household 正交化•Householder 变换可实现QR 分解–A =QR , Q m ×m 正交阵, R m ×n 上三角阵–实现:作Q p …Q 2Q 1A=R , Q k 是H-变换.p =min{m -1,n }, 即得A =QR , Q =Q 1Q 2…Q p -1•典型步(对照右边矩阵表示)–象消元法那样将右下角矩阵第一列对角元下全变成零(己是则免,H =I )–Ĥ=I -βvv T ,β=2/v T v同前,H =diag(I Ĥ)也是H-变换T⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡*=⎥⎦⎤⎢⎣⎡*⎥⎦⎤⎢⎣⎡v o v o I H A o r A H A O R H I β•Householder 正交化(QR 分解)算法1.输入m n ⨯∈A R ,置1,min(1,).k p m n ==- 2.max(||,,1,,).ik a i k k m η==+ 3.若0η=,则0,0k kk d r ==,否则221/,,,sign()(),1,,,,,,1,,ik ik kk kkmkkk kk k kk kk m j ik ij k i k ij ij j ik a a i k ma a a a a d a r a a d j k n a a a i k m j k n ηαααηαττ-====++=+==-⎛⎫==+ ⎪⎝⎭=-==+∑ 4.若k <p ,则k = k +1,转步骤2;否则,结束. 11213111(1)(2)2223222(1)(2)(3)333333(1)(2)(3)444,,r r r r r r βββ⎛⎫ ⎪⎛⎫⎛⎫ ⎪ ⎪ ⎪=== ⎪ ⎪ ⎪⎪ ⎪ ⎪⎝⎭⎝⎭⎪⎝⎭A r d v v v v v v v v v (1)11213(1)(2)2223(1)(2)(3)333(1)(2)(3)444,r r r ⎛⎫ ⎪⎛ ⎪==⎪⎪⎝ ⎪⎝⎭A r v v v v v v v v v 运算量:乘、加各次求Q=H 1…H P I 另需乘、加次数各存储方式: 2313mn n -22312()3m n mn n -+2.0198 1.9612 5.49130.588350.20.39223 1.9652 2.157302230012⎛⎫ ⎪- ⎪ ⎪- ⎪-⎝⎭•A =QR•正交化过程k = 1525110320223012---⎛⎫⎪-⎪= ⎪- ⎪-⎝⎭A 5.0990 1.9612 5.49130.588350 2.0381 1.5852 2.528800 2.51663.2672000.76472-⎛⎫⎪-- ⎪= ⎪-⎪-⎝⎭R 0.980580.0377430.176600.0764720.196120.188710.883020.3823600.981310.176600.076472000.397360.91766---⎛⎫⎪-- ⎪= ⎪---⎪-⎝⎭Q a 1 = (5,1,0,0)T ,5η= 1.0198α=T11(2.0198,0.2,0,0)==a v 11110.48548, 5.0990d r β===-a 1 = (1,0.2,0,0)T ,a 11 =1+1.098= 2.019 8用以变换A 的后三列得到1Household 正交化算例(续)•正交化过程k = 2•正交化过程k = 3T2(0.39223,2,0),2η==a 220.19612 1.0190 1.2152a =+=T22(1.2152,1,0)==a v 22220.80755, 2.0381d r β===-2.0198 1.9612 5.49130.588350.2 1.2152 1.5852 2.528801 2.3094 2.6943012⎛⎫⎪- ⎪⎪- ⎪-⎝⎭用以变换A 的最后一列得到用以变换A 的后二列得到T3(2.3094,1), 2.3094η==a T3(1,0.43301)=a 1.0897α=T33(2.0897,0.43301)==a v 33330.43913, 2.5166d r β===-2.01981.9612 5.49130.588350.21.2152 1.58522.528801 2.08973.2672000.433010.76472⎛⎫ ⎪- ⎪ ⎪⎪-⎝⎭T2(0.19612,1,0), 1.0190α==a T 11T 22T330.48548,(2.0198,0.2,0,0)0.80755,(1.2152,1,0)0.43913,(2.0897,0.43301)βββ======v v v R 如前,Q 可由下面的信息生成Givens 变换•定义–G =G (i ,k ,θ)=I +s (e i e k T -e k e i T )+c (e i e i T +e k e k T )•性质–G T G =I–任给x 可使y =G x 的k 分量为零:r =(x i 2+x k 2)1/2 ≠0c =x i /r ,s =x k /r•可用以化上三角形一如消元过程⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-=11),,(c s s c k i G θendend ,11, else ,11, if else 0,1 0 if 22cts tc x x t stc ts x x t x x s c x i k k i ik k =+===+==≥===Givens 正交化算例•算例•过程525110320223012---⎛⎫⎪-⎪= ⎪- ⎪-⎝⎭A 0.980580.0377430.176600.0764720.196120.188710.883020.3823600.981310.176600.076472000.397360.91766--⎛⎫⎪- ⎪=⎪-⎪⎝⎭Q 5.09901.9612 5.49130.5883502.0381 1.5852 2.528800 2.51663.267200.76472---⎛⎫⎪- ⎪=⎪- ⎪-⎝⎭R (2,1)元变为零,t = 0.2, c = 0.980 58, s = 0.196 12.一行:5.099 0 –1.961 2 –5.491 3 –0.588 35二行:0 0.392 23 –1.961 2 2.157 3(3,2)元变零,t = 0.196 12, c = 0.192 45, s = 0.981 31.二行:0 2.038 1 1.585 2 –2.528 8三行:0 0 2.309 4 –2.694 3(4,3)元变零,t = 0.433 01, c = 0.917 66, s = 0.397 36.QR 分解定理•定理设A 是m ×n (m ≥ n ) 矩阵,则A 有QR 分解, 其中Q 是m ×n 的正交矩阵,R 是具有非负对角元的上三角矩阵;而且当m = n 且A 非奇异时R 的对角元皆正上述分解还是唯一的•证⎛⎫= ⎪⎝⎭R A Q O 于是,有T 12T11||||⎛⎫= ⎪ ⎪⎝⎭Q A A v α 1 n –1对(1)(1)m n -⨯-矩阵A 1应用数学归纳法假定,得 212⎛⎫= ⎪⎝⎭R A Q O 其中,Q 2是(m –1)×(m –1)正交矩阵,R 2是具有非负对角元的(1)(1)n n -⨯-上三角矩阵. 这样,令T 121221||||,⎛⎫⎛⎫== ⎪ ⎪ ⎪⎝⎭⎝⎭Q Q R Q R αv 000 则Q 和R 满足定理的要求. 存在性得证.再证唯一性. 设m = n 且A 非奇异,易知R 对角元皆正,假定==A QR QR ,其中,Q , Q 是m m ⨯正交矩阵,R , R 是具有正对角元的上三角矩阵. A 非奇异蕴含着R , R 的对角元均为正数,因此,有 T 1-=Q Q RR 既是正交矩阵又是对角元均为正数的上三角矩阵,只能是单位矩阵. 从而,必有=Q Q ,=R R 即分解是唯一的先证存在性,用数学归纳法. 当n = 1时,定理显然成立. 现假定已经对所有p ×(n –1)矩阵成立,这里假设(1)p n ≥-,设m n ⨯矩阵A 的第一列为1α(可为零向量),则由定理7.5知,存在m m ⨯正交矩阵Q 1,使得T 11121||||=Q e αα于是,有T 12T11||||⎛⎫=⎪ ⎪⎝⎭0Q A A v α 1 n –1 对(1)(1)m n -⨯-矩阵A 1应用数学归纳法假定,得212⎛⎫= ⎪⎝⎭R A Q O 1m –1最小二乘解:列满秩•列满秩时求(1)的最小二乘解–形成正规方程A T Ax=A T b(n阶)(乘法和加法各mn2/2次) 用平方根法(乘法和加法各n3/6次)用G-S作A=QR:R T Rx=R T Q T b,Rx=Q T b(各mn2次) –用Householder变换或Givens变换作QR分解║Ax-b║2 =║Q T Ax-Q T b║2==║Rx-c1║2+║c2║2,解x=R-1c1,最小值║c2║2注: 若记Qm×m =(Q1 Q2), Q1是m×n阵则有c1=Q1b,c2=Q2b⎥⎦⎤⎢⎣⎡-⎥⎦⎤⎢⎣⎡21ccxOR最小二乘解:列满秩算例•求最小二乘解•求最小二乘解L123525110320223012x x x ---⎛⎫⎛⎫⎛⎫ ⎪ ⎪- ⎪ ⎪ ⎪= ⎪ ⎪ ⎪- ⎪ ⎪ ⎪⎝⎭-⎝⎭⎝⎭12326102831081442814399x x x ---⎛⎫⎛⎫⎛⎫ ⎪ ⎪ ⎪-=- ⎪ ⎪ ⎪ ⎪ ⎪ ⎪--⎝⎭⎝⎭⎝⎭正规方程5.0190001.9912 2.038105.4913 1.58522.5166⎛⎫⎪- ⎪⎪-⎝⎭T( 1.6023,0.23099, 1.2982)=---x 5.09901.9612 5.49130.5883502.0381 1.5852 2.528800 2.51663.26720000.76472-⎛⎫ ⎪-- ⎪=⎪- ⎪-⎝⎭R 5251103202230012---⎛⎫ ⎪- ⎪= ⎪- ⎪-⎝⎭A 方程H-正交化增广矩阵T ( 1.6023,0.23099, 1.2982)=---x 剩余是0.764 721.9612奇异值分解(SVD)•矩阵奇异值–A m ×n 的奇异值σ1≥σ2≥…≥σr >σr+1=…=σn =0是A T A 的特征值λ1, …,λn 的平方根•奇异值分解定理),,diag(正交阵,1Tr n n m m σσΣV U V O O O ΣU A =⎥⎦⎤⎢⎣⎡=⨯⨯形式阵即得矩,,1,连同,得,,,1由),,,(阵 正交增.则,,1,/令,,),,,(证.取TTT21T TT21分解補成r k u Av o Av o Av A v o Av A n r k u u u U u u r k Av u v Av A I V V v v v V k k k k k kk m kj j k k k k k k k n =====+========σδσλ奇异值分解(续)•推论(记号同前)–分解形式A=σ1u1v1T+σ2u2v2T+…+σr u r v r TA=ÛΣŴT, Û=(u1u2…u r),Ŵ =(v1v2…v r)–空间关系R(A)=Span{u1,u2,…,u r}N(A)=Span{v r+1,v r+2,…,v n}R(A T)=Span{v1,v2,…,v r}N(A T)=Span{u r+1,u r+2,…,u m}R(A)=N(A T)⊥, R(A T)=N(A)⊥SVD 与A+•X =A +满足Penrose 方程–AXA =A (P1)–XAX =X (P2)–(AX )T =(AX )(P3)–(XA )T =(XA )(P4)•由SVD 解出X =A +T T 111T111rr ru v u v UO O O ΣV A σσ++=⎥⎦⎤⎢⎣⎡=-+T 11T:乃得唯一解得(P4)代入得(P3)代入得(P2)代入得(P1)代入对应分块SVD 解.取U O OO ΣV X O L O K K L ΣM ΣS U M L K S V X ⎥⎦⎤⎢⎣⎡=====⎥⎦⎤⎢⎣⎡=--图示A与A+•SVD绐出A与A+在标准正交基下向量对应关系V1= Span{v,v2,…,v r}, V2= Span{v r+1,v r+2,…,v n},1U1= Span{u,u2,…,u r}, U2=Span{u r+1,u r+2,…,u m}1最小二乘解•(1)的最小二乘解–推导:按前述标准正交基分解,再求║Ax-b║2最小x=c1v1+c2v2+…+c n v nA x=c1σ1u1+c2σ2u2+…+c rσr u rb=u1T b u1+u2T b u2+…+u m T bu m║Ax-b║2最小:c=u k T b/σk,k≤r,其余任意k–最小二乘解通解x=1/σ1u1T b v1+1/σ2u2T b v2+…+1/σr u r T b v r+ v r +…+c n v n, c r+1, …, c n任意c r+1–最小2-范数最小二乘解y=1/σ1u1T b v1+1/σ2u2T b v2+…+1/σr u r T b v rSVD与最小二乘解•上述结果亦可借助SVD得到–A, A+代入通解(2)x=A+b+(I-A+A)z(z任意n维向量)2-范数最小A+b=(1/σ1v1u1T+…+1/σr v r u r T)b(I-A+A)z=(I-(v1v1T+v2v2T+…+v r v r T) )z=(v r+1v r+1T+…+v n v n T)z =c r+1v r+…+c n v n –由SVD直接推出最小二乘解║Ax-b║2=║UΛV T x-b║2=║ΛV T x-U T b║2=║Λc-U T b║2 ,这里Λ=diag(ΣO),c=V T x的i,U T b的i分量u i T b.从而可得结果.分量ci代入正规方程A T Ax=A T b关于A +的定义•A +有多个等价定义–由满秩分解:C T (CC T )-1(B T B )-1B T–由Penrose 方程.–由SVD:–由最小二乘解:(1)中任一b 对应唯一最小2-范数最小二乘解x 所确定的矩阵.–由线性算子确定的矩阵.线性算子f :R m →R nf (y )=x ,当y ∈R (A ), Ax =y f (y )=o ,当y ⊥R (A )•注.一个或几个Penrose 方程可定义多种广义逆T1V O O O ΣU ⎥⎦⎤⎢⎣⎡-。
参考答案:习题七7.1 运用Euler 方法和改进Euler 方法求下列初值问题在给定区间上的数值解, 计算结果保留四位小数。
(1) ⎪⎩⎪⎨⎧=≤≤=-=04.0,2.00,1)0(22h x y y x dxdy; (2) ⎪⎩⎪⎨⎧=≤≤=-=1.0,5.00,1)0(h x y ydxdy。
解:(1) 5,4,3,2,1,0,,04.0,1)0(,),(22====-=n nh x h y y x y x f n8360.08635.08935.09262.09616.01Euler 8299.08583.08894.09232.096.01Euler 2.016.012.008.004.00改进k x (2) 5,4,3,2,1,0,,1.0,1)0(,),(====-=n nh x h y y y x f n6071.06708.07412.0819.0905.01Euler 5905.06561.0729.081.09.01Euler 5.04.03.02.01.00改进k x 7.2 用Euler 方法和改进Euler 方法求初值问题⎪⎩⎪⎨⎧=+=0)0(y bax dx dy的解在),2,1(, ==n hn x n 处的近似值。
bnh ah n n bnh n ah bh anh h n a y bhanh y b anh h y b ax h y y x hf y y y x b ax y x f n n n n n n n n n ++=+++++==++-+=++=++=++=+===+=-+2222121002)1()...210(...2)1()()(),(0,0,),(7.3 运用标准四阶Runge--Kutta 法求初值问题⎪⎩⎪⎨⎧=+=1)1(32y yx x dx dy的解在x =1.1,1.2,1.3处的近似值, 计算结果保留三位小数。
102.2)3.1(,587.1)2.1(,24.1)1.1(===y y y7.4 运用标准四阶Runge--Kutta 法求初值问题⎪⎩⎪⎨⎧=--=1)0(2y xy y dx dy在区间[0,1]上的数值解, 取步长h =0.2, 将计算结果与准确值1)12()(---=x e x y x 进行比较。
第七章 受扭构件承载力计算7.1 概述工程中的钢筋砼受扭构件有两类:● 一类是 —— 平衡扭矩:是静定结构由于荷载的直接作用所产生的扭矩,这种构件所承受的扭矩可由静力平衡条件求得,与构件的抗扭刚度无关。
如:教材图7·1a 、b 所示受檐口竖向荷载作用的挑檐梁,及受水平制动力作用的吊车梁以及平面曲梁、折线梁、螺旋楼梯等。
● 另一类是 —— 协调扭矩:是超静定结构中由于变形协调条件使截面产生的扭矩,构件所承受的扭矩与其抗扭刚度有关。
如:教材图7·2 所示现浇框架的边梁。
由于次梁在支座(边梁)处的转角产生的扭转,边梁开裂后其抗扭刚度降低,对次梁转角的约束作用减小,相应地边梁的扭矩也减小。
● 本章只讨论平衡扭转情况下的受扭构件承载力计算。
在工程结构中,直接承受扭矩、弯矩、剪力和轴向力复合作用的构件是常遇的。
但规范对弯扭、剪扭和弯剪扭构件的设计计算,是以抗弯、抗剪能力计算理论和纯扭构件的承载力计算理论为基础,采用分别计算和叠加配筋的方法进行的,故有必要先了解纯扭构件的受力性能和承载力的计算方法。
7.2 纯扭构件的受力性能7.2.1 素砼纯扭构件的受力性能素砼构件也能承受一定的扭矩。
素砼构件在扭矩T 的作用下,在构件截面中产生剪应力τ及相应的主拉应力tp σ 和主压应力cp σ(教材图7·3)。
根据微元体平衡条件可知:τστσ==cp tp ,由于砼的抗拉强度远低于它的抗压程度,因此当主拉应力达到砼的抗拉强度时,即t tp f ≥=τσ时,砼就会沿垂直于主拉应力方向裂开(教材图7·3)。
所以在纯扭矩作用下的砼构件的裂缝方向总是与构件轴线成45o的角度。
并且砼开裂时的扭矩T 也就是相当于t f =τ时的扭矩,即砼纯扭构件的受扭承载力co T 。
为了求得co T ,需要建立扭矩和剪应力之间的关系,然后根据强度条件,即砼纯扭构件的破坏条件求出受扭承载力co T 。
7.2.2 素砼纯扭构件的承载力计算(一) 、弹性分析法:用弹性分析方法计算砼纯扭构件承载力时,认为砼构件为单一匀质弹性材料。
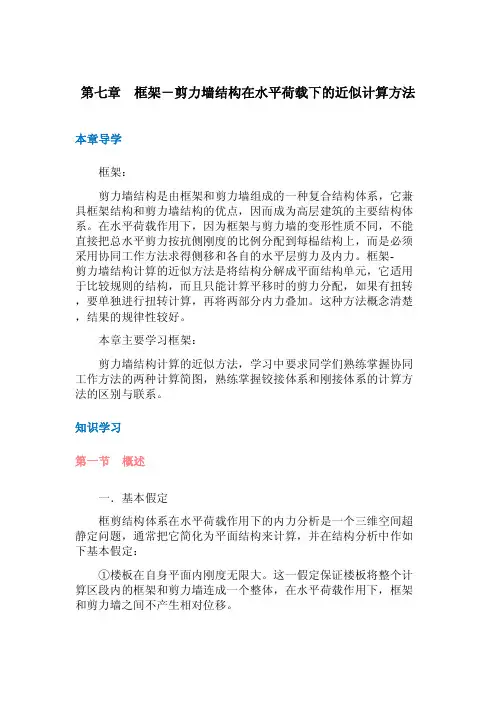
第七章轴向⼒径向⼒及其平衡图7—1 轴向⼒计算原理图第七章轴向⼒径向⼒及其平衡第⼀节产⽣轴向⼒的原因及计算⽅法泵在运转中,转⼦上作⽤着轴向⼒,该⼒将拉动转⼦轴向移动。
因此,必须设法消除或平衡此轴向⼒,⽅能使泵正常⼯作。
泵转⼦上作⽤的轴向⼒,由下列各分⼒组成:1.叶轮前、后盖板不对称产⽣的轴向⼒,此⼒指向叶轮吸⼊⼝⽅向,⽤1A 表⽰;2.动反⼒,此⼒指向叶轮后⾯,⽤2A 表⽰;3.轴台、轴端等结构因素引起的轴向⼒,其⽅向视具体情况⽽定,⽤3A 表⽰;4.转⼦重量引起的轴向⼒,与转⼦的布置⽅式有关,⽤4A 表⽰;5.影响轴向⼒的其它因素。
下⾯分别计算各轴向⼒。
⼀. 盖板⼒1A 的计算(图17—1)由图可知,叶轮前后盖板不对称,前盖板在吸⼊眼部分没有盖板。
另⼀⽅⾯,叶轮前后盖板象轮盘⼀样带动前后腔内的液体旋转,盖板侧腔内的液体压⼒按抛物线规律分布。
作⽤在后盖板上的压⼒,除⼝环以上部分与前盖板对称作⽤的压⼒相抵消外,⼝环下部减去吸⼊压⼒1P 所余压⼒,产⽣的轴向⼒,⽅向指向叶轮⼊⼝,此⼒即是1A 。
假设盖板两侧腔的液体⽆泄漏流动,并以叶轮旋转⾓速度之半2ω旋转,则任意半径R 处的压头h '为(推导见⼗⼋章))R R (g)u u (g g )u (g )u (h h h 22222222228812222-=-=-='''-''='ω(7—1)叶轮出⼝势扬程,当假定21m m v v =,01=u v 时,为 g)v v ()v v (H g v v H g p p H u m u m t t p 222121222222212+-+-=--=-=ρ g)u gH (H g v H t u t 2222122-=-= 即 )u gH (H H t t p 2221-= (7—2)叶轮后盖板任意半径处,作⽤的压头差为)R R (g H h H h p p 22228--='-=ω将上式两侧乘以液体密度ρ和重⼒加速度g ,并从轮毂半径积分到密封环直径,则得盖板轴向⼒1A--==m h m h R R p R R RdR )]R R (gH [g g RdRh A 22221822ωπρρπ )R R (g g )R R (g gR )R R (gH h m h m h m p 482282224422222222-+---=ωπρπρωπρ即 )]R R R (g H )[R R (g A h m p h m 2822222221+---=ωπρ(7—3)这部分轴向⼒也可很⽅便地按压⼒体体积来计算。