《信号检测与估计》第十章习题解答
- 格式:pdf
- 大小:123.05 KB
- 文档页数:4

1. 令观测样本由1(,....)i ix s w i n =+=给出,其中{}i w 是一高斯白噪声,其均值为零,方差为1。
假定s的先验概率密度为22())s f a a =-试用平方和均匀代价函数分别求s 的贝叶斯估计。
解:2()(|))2i i x s p x s -=-,1,...,i n =222111()()1(|)(|))()exp()222n n n ni ii i i i x s x s p s p x s π===--==-=-∑∏x且12221()()exp(2)2p s s s π=-=-(1) 采用平方代价函数,相应贝叶斯估计为最小均方误差估计mse s[|](|)mse sE s sp s ds +∞-∞==⎰x x21222121221222112221112()(|)()111(|)()exp()()exp(2)()()222()11()exp(2)()22(2)11()exp()()22(1)211()exp()exp(()22n ni i n ni i nn ii i nn i i i i x s p s p s p s s p p x s s p xx s s s p x n s x s p πππππ=+=+=+==-==---=---++=-+-=--∑∑∑∑x x x x x x x 221112222211112)2(1)(2)111()exp()exp()()222()(())1111()exp()exp()1()222(1)nnnin ii i nnni i n ii i i x xn s s n p x x x s n n p n ππ+==+===+-+=----++--+∑∑∑∑∑∑x x 分析(|)p s x ,发现其为高斯型的;而mse s为其条件均值,因此可以直接得到 1()1ni mse i x s n ==+∑ (2) 采用均方代价函数,相应贝叶斯估计为最大后验估计map sln((|))|0map p s s ss∂==∂x ,也即满足 ln((|))ln(())[]|0map p s p s ss s∂∂+==∂∂x x 故有1()0nmapmap ii x ss=--=∑ 所以111n map i i s x n ==+∑2. 设观测到的信号为x n =θ+其中n 是方差为2n σ、均值为零的高斯白噪声。

《信号检测与估计》第十章习题解答10.1 设线性滤波器的输入信号为()()()t n t s t x +=,其中()[]0E =t s ,()[]0E =t n ,并且已知()ττ-e =S R ,()ττ-2e=N R ,()0=τsn R ,求因果连续维纳滤波器的传递函数。
解:连续维纳滤波器与离散维纳滤波器的形式是相同的,即()()()()+⎦⎤⎢⎣⎡−⋅⋅=s B s P s B s H xs w112opt σ 因此需要求解()t s 的复功率谱和()t x 的时间信号模型。
考虑到信号与噪声不相关,因此观测数据的功率谱就等于信号的复功率谱加上噪声的复功率谱。
对观测数据的复功率谱进行谱分解,就可以得到()t x 的时间信号模型。
()t s 的复功率谱为()()()20s -10s 1-s --121111e e e e s s s d d d s P S −=−++=+==∫∫∫∞−+∞++∞∞−τττττττ ()t n 的复功率谱为()2s -2-44e es d s P N −==∫+∞∞−τττ因此,观测数据的复功率谱为()()()()()()()()()s s s s ss ss s P s P s P N S X −+−++=−+−=+=2211-226441122 取12=w σ()()()()s s ss B +++=2126()()()()()()()()()s s s s s s s s B s P s B s P N xs +=−==1-2-262-2-1-2612--2令()()()s B s P s F xs -=,()τf 是()s F 的拉普拉斯反变换。
要求()τf 是因果的,可将s 平面右半平面的极点扔掉,()()()[]12e 61,e Re e21-s s +=−==∫τττπτs F s ds s F jf C给()τf 取因果,并做拉普拉斯变换,得到()s d s F +⋅+=⋅⋅+=∫∞++11126e e 1260s --τττ()()()()()()())()()122261112626211112opt +++=+×+×+++×=⎦⎤⎢⎣⎡−⋅⋅=+ss ss s s s B s P s B s H xs wσ10.2 设已知()()()n n n s n x +=,以及()()()z z z G S 4.014.0192.01−−=−,()1=z G N ,()0=z G sn ()n s 和()n n 不相关。
信号检测与估计知识点一、知识概述《信号检测与估计知识点》①基本定义:信号检测与估计呢,简单说就是从一堆有干扰的数据里找到真正的信号,还得把这个信号的一些特征估摸出来。
就好比在很嘈杂的菜市场找朋友的声音(信号),还得判断朋友声音的大小之类的特征(估计)。
②重要程度:在通信、雷达、图像处理这些学科里超级重要。
就拿雷达来说,如果不能准确检测和估计信号,那根本就不知道飞机在哪呢,整个防空系统都得乱套。
③前置知识:得先知道概率论、随机过程这些基础知识。
不然,信号检测与估计里那些关于概率、随机变量啥的根本理解不了。
④应用价值:在通信领域,可以提升信号传输准确性;在医学上,检测病人的生理信号,像心电图啥的,估计其参数有助于诊断病情;在工业自动化里,对检测到的信号进行估计,能更好控制生产流程。
二、知识体系①知识图谱:信号检测与估计在信号处理这个大的学科里面是很核心的部分,就像心脏在人体里的位置一样重要。
②关联知识:和信号处理里的滤波、调制解调关系密切。
比如说滤波后的信号可能才更有利于检测和估计,而检测估计的结果可以反馈给调制解调改变参数。
③重难点分析:- 掌握难度:这个知识点有点难,难点在于要同时考虑到噪声和信号的混合情况,还得建立合适的模型。
按我的经验,很多时候分不清哪些是噪声干扰带来的变化,哪些是信号本身的特征。
- 关键点:把握好概率统计的方法,准确地建立信号模型是关键。
④考点分析:- 在考试中很重要,如果是在电子通信等相关专业的考试里,经常考。
- 考查方式可能是给一些含噪声的信号数据,让你进行检测和估计参数,也可能是叫你设计一个简单的信号检测方案。
三、详细讲解【理论概念类】①概念辨析:- 信号检测就是判断信号是否存在。
咱们看谍战片里的电台接收情报,接收员得判断接收到的微弱声音(可能包含信号和噪声)里是不是有真正要接收的情报信号,这就是信号检测。
- 信号估计是对信号的各种参数,像幅度、相位等进行估计。
好比知道有信号了,还得估摸这个信号是多强、频率是多少之类的。
信号检测估计复习资料第二章随机信号及其统计描述1.两个随机过程不相关一定独立。
()2.严格的平稳随机过程不一定是宽平稳随机过程。
()3.平稳随机过程的功率谱密度与自相关函数是一对傅里叶变换。
()4.白噪声是一种理想化模型,在实际中是不存在的。
()5.功率谱密度是样本函数x在单位频带内在1欧姆电阻上的平均功率值。
()6.加性噪声按功率谱密度分为()噪声和()噪声。
7.有色噪声的功率谱密度在频率范围内是均匀分布的。
()8.对于白噪声下面哪个量是均匀分布的()。
A.噪声电压B.噪声电流C.噪声功率D.噪声功率谱密度9.在信号检测与估计理论中,通信接收机中的噪声可以近似为平稳随机过程。
()第三章经典检测理论1.什么是二元检测,其本质是什么?画出其理论模型。
2.二元检测中有两类错误的判决概率,两类正确判决概率。
( )3.下面哪种概率是虚警概率()。
A.P(D0|H0)B.P(D1|H0)C.P(D1|H1)D. P(D0|H1)4.二元检测中有先验概率和后验概率,P(H0)是()概率,P (H0|x)是()概率。
5.下面哪个为后验概率密度函数()。
A.f(x|H0)B.f(x|H1,a)C.f(a|x)D.f(a)6.经典检测理论中常用的4个检测准则分别为()、()、()和()。
7.最大后验概率准则和最小错误概率准则判决公式是不同的。
()8.最大后验概率准则为何称为理想观测者准则?9.极大极小风险准则是在先验概率未知的情况下,使可能出现的最大风险达到极小的判别准则。
()10.Neyman-Pearson准则规定,在给定( )概率情况下,使得()概率尽可能大。
11.最大后验估计和最大似然估计的使用条件。
12.下面哪种判决准则是时平均风险最小的准则()。
A.最大后验概率准则B.最小错误概率准则C.Bayes准则D.Neyman-Pearson准则13.当先验概率未知和代价函数均未知时,使用的判决准则是Neyman-Pearson准则。

2-1 1[()]2E x t =,1212(,)3X t t R t t = 2-2 略。
2-3111[()]sin cos 333E x t t t=++12112212121111111(,)sin cos sin cos sin()cos()9999999X R t t t t t t t t t t =+++++++-2-4 [()]0E X t =,20(,)cos R t t w τστ+=2-5 [()]0E X t =,20(,)cos 2a R t t w ττ+= 2-6 略。
2-7 [()]0E X t =,10(,)200R t t τττ⎧=⎪+=⎨⎪≠⎩2-8 1210()()()2cos(10)(21)X X X R R R eτττττ-=+=++,2[()](0)5X E X t R ==,2(0)2X X R σ==2-9 11()()cos 22jw jw X X o G w R e d w e d τττττ∞∞---∞-∞==⎰⎰00()()()22X P w w w w w ππδδ=-++2-10 00()(()())2Y X X aG w G w w G w w =-++2-11 ())()X R u ττ=+-3-1 二元信号统计检测的贝叶斯平均代价C 为110000000100100110111111()()=()()()() ()()()()ij i i j j i C c P H P H H c P H P H H c P H P H H c P H P H H c P H P H H ===+++∑∑ 利用01()1()P H P H =-1101()1()P H H P H H =- 0010()1()P H H P H H =-得平均代价C 为[][]0011010110011011110100101110111000111011000101()1()1()() ()()()1() ()() ()()()()()()C c P H P H H c P H P H H c P H P H H c P H P H H c c c P H H P H c c c c P H H c c P H H =-⎡-⎤+-+⎣⎦+⎡-⎤⎣⎦=+-+⎡-+---⎤⎣⎦3-2 1)由于各假设j H 的先验概率()(0,1,2)j P H j =相等,所以采用最大似然准则。
一、概念:1. 匹配滤波器。
概念:所谓匹配滤波器是指输出判决时刻信噪比最大的最佳线性滤波器。
应用:在数字信号检测和雷达信号的检测中具有特别重要的意义。
在输出信噪比最大准则下设计一个线性滤波器是具有实际意义的。
2. 卡尔曼滤波工作原理及其基本公式(百度百科)首先,我们先要引入一个离散控制过程的系统。
该系统可用一个线性随机微分方程(Linear Stochastic Difference equation)来描述:X(k)=A X(k-1)+B U(k)+W(k)再加上系统的测量值:Z(k)=H X(k)+V(k)上两式子中,X(k)是k时刻的系统状态,U(k)是k时刻对系统的控制量。
A和B是系统参数,对于多模型系统,他们为矩阵。
Z(k)是k时刻的测量值,H是测量系统的参数,对于多测量系统,H为矩阵。
W(k)和V(k)分别表示过程和测量的噪声。
他们被假设成高斯白噪声(White Gaussian Noise),他们的covariance 分别是Q,R(这里我们假设他们不随系统状态变化而变化)。
对于满足上面的条件(线性随机微分系统,过程和测量都是高斯白噪声),卡尔曼滤波器是最优的信息处理器。
下面我们来用他们结合他们的covariances 来估算系统的最优化输出(类似上一节那个温度的例子)。
首先我们要利用系统的过程模型,来预测下一状态的系统。
假设现在的系统状态是k,根据系统的模型,可以基于系统的上一状态而预测出现在状态:X(k|k-1)=A X(k-1|k-1)+B U(k) (1)式(1)中,X(k|k-1)是利用上一状态预测的结果,X(k-1|k-1)是上一状态最优的结果,U(k)为现在状态的控制量,如果没有控制量,它可以为0。
到现在为止,我们的系统结果已经更新了,可是,对应于X(k|k-1)的covariance还没更新。
我们用P表示covariance:P(k|k-1)=A P(k-1|k-1) A’+Q (2)式(2)中,P(k|k-1)是X(k|k-1)对应的covariance,P(k-1|k-1)是X(k-1|k-1)对应的covariance,A’表示A的转置矩阵,Q是系统过程的covariance。
一、填空题说明填空题(每空1分,共10分)或(每空2分,共20分)二、第1章填空题1.从系统的角度看,信号检测与估计的研究对象是 加性噪声情况信息传输系统中的接收设备 。
从信号的角度看,信号检测与估计的研究对象是 随机信号或随机过程 。
2.信号检测与估计的基本任务:以数理统计为工具,解决接收端信号与数据处理中 信息恢复与获取 问题。
3.信号检测与估计的基本任务:以数理统计为工具,从被噪声及其他干扰污染的信号中 提取、恢复 所需的信息。
4.信号检测是在噪声环境中,判断 信号是否存在或哪种信号存在 。
信号检测分为 参量检测和 非参量检测 。
参量检测是以 信道噪声概率密度已知 为前提的信号检测。
非参量检测是在 信道噪声概率密度为未知 情况下的信号检测。
5.信号估计是在噪声环境中,对 信号的参量或波形 进行估计。
信号估计分为 信号参量估计和 信号波形估计 。
信号参量估计是对 信号所包含的参量(或信息) 进行的估计。
信号波形估计是对 信号波形 进行的估计。
6.信号检测与估计的数学基础:数理统计中贝叶斯统计的 贝叶斯统计决策理论和方法 。
三、第2章填空题1.匹配滤波器是在输入为 确定信号加平稳噪声 的情况下,使 输出信噪比达到最大 的线性系统。
2.匹配滤波的目的是从含有噪声的接收信号中,尽可能 抑制噪声,提高信噪比 。
3.匹配滤波器的作用:一是使滤波器 输出有用信号成分尽可能强 ;二是 抑制噪声,使滤波器输出噪声成分尽可能小 。
4.匹配滤波器的传输函数与输入 确定信号频谱的复共轭 成正比,与输入 平稳噪声的功率谱密度 成反比。
3.匹配滤波器传输函数的幅频特性与输入 确定信号的幅频特性成 正比,与输入 平稳噪声的功率谱密度 成反比。
4.物理不可实现滤波器也称作非因果滤波器:是指 物理上不可能实现或不满足因果规律 的滤波器。
5.物理不可实现匹配滤波器的冲激响应)(t h 满足: 0)(≠t h , ∞<<∞-t 。

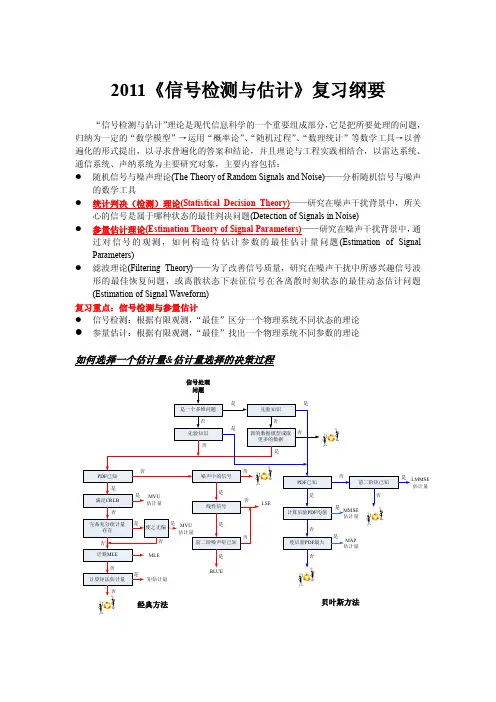
2011《信号检测与估计》复习纲要“信号检测与估计”理论是现代信息科学的一个重要组成部分,它是把所要处理的问题,归纳为一定的“数学模型”→运用“概率论”、“随机过程”、“数理统计”等数学工具→以普遍化的形式提出,以寻求普遍化的答案和结论,并且理论与工程实践相结合,以雷达系统、通信系统、声纳系统为主要研究对象,主要内容包括:● 随机信号与噪声理论(The Theory of Random Signals and Noise)——分析随机信号与噪声的数学工具● 统计判决(检测)理论(Statistical Decision Theory)——研究在噪声干扰背景中,所关心的信号是属于哪种状态的最佳判决问题(Detection of Signals in Noise)● 参量估计理论(Estimation Theory of Signal Parameters)——研究在噪声干扰背景中,通过对信号的观测,如何构造待估计参数的最佳估计量问题(Estimation of Signal Parameters)● 滤波理论(Filtering Theory)——为了改善信号质量,研究在噪声干扰中所感兴趣信号波形的最佳恢复问题,或离散状态下表征信号在各离散时刻状态的最佳动态估计问题(Estimation of Signal Waveform) 复习重点:信号检测与参量估计 ● 信号检测:根据有限观测,“最佳”区分一个物理系统不同状态的理论 ● 参量估计:根据有限观测,“最佳”找出一个物理系统不同参数的理论如何选择一个估计量&估计量选择的决策过程信号处理否估计量LSE经典方法贝叶斯方法如何选择一个检测器-二元信号检测如何选择一个检测器-多元信号检测*注:ARMA:自回归滑动平均BLUE:最佳线性无偏估计CFAR:恒虚警率CRLB :Cramer-Rao下限EM:数学期望最大化GLRT:广义似然比检验IID:独立同分布LLR:对数似然比LMMSE:线性最小均方误差LMP:局部最大势LRT:似然比检验LSE:最小二乘估计LSI:线性时不变MAP:最大后验概率MLE:最大似然估计MMSE:最小均方误差估计MVU:最小方差无偏NP:Neyman-Pearson准则PRN:伪随机噪声RBLS:Rao-Blackwell-Lehmann-Scheffe定理ROC:接收机工作特性UMP:一致最大势WGN:白色高斯噪声WSS:广义平稳2011《信号检测与估计》复习参考题参数估计部分:1.基本概念理解:最小方差无偏估计,最佳线性无偏估计,最大似然估计,最小二乘估计,矩方法估计,最小均方误差估计,最大似然估计,线性最小均方误差估计,一般(经典)线性模型和贝叶斯线性模型。
3一、简答题注释简答题(每题5分,共20分)或(每题4分,共20分)二、第1章简答题1.从系统和信号的角度看,简述信号检测与估计的研究对象。
答:从系统的角度看,信号检测与估计的研究对象是加性噪声情况信息传输系统中的接收设备。
从信号的角度看,信号检测与估计的研究对象是随机信号或随机过程。
2.简述信号检测与估计的基本任务和所依赖的数学基础。
答:解决信息传输系统接收端信号与数据处理中信息恢复与获取问题,或从被噪声及其他干扰污染的信号中提取、恢复所需的信息。
信号检测与估计所依赖的数学基础是数理统计中贝叶斯统计的贝叶斯统计决策理论和方法。
3.概述信号在传输过程中与噪声混叠在一起的类型。
答:信号在传输过程中,噪声与信号混杂在一起的类型有3种:噪声与信号相加,噪声与信号相乘(衰落效应),噪声与信号卷积(多径效应)。
与信号相加的噪声称为加性噪声,与信号相乘的噪声称为乘性噪声,与信号卷积的噪声称为卷积噪声。
加性噪声是最常见的干扰类型,也是最基本的,因为乘性噪声和卷积噪声的情况均可转换为加性噪声的情况。
三、第2章简答题1.简述匹配滤波器概念及其作用。
答:匹配滤波器是在输入为确定信号加平稳噪声的情况下,使输出信噪比达到最大的线性系统。
匹配滤波器的作用:一是使滤波器输出有用信号成分尽可能强;二是抑制噪声,使滤波器输出噪声成分尽可能小,减小噪声对信号处理的影响。
2.根据匹配滤波器传输函数与输入确定信号及噪声的关系,简述匹配滤波器的原理。
答:匹配滤波器传输函数等于输入确定信号频谱的复共轭除以输入平稳噪声的功率谱密度,再附加相位项T ω-,其中T 为输入确定信号的持续时间或观测时间。
由于匹配滤波器传输函数的幅频特性与输入确定信号的幅频特性成正比,与输入噪声的功率谱密度成反比;对于某个频率点,信号越强,该频率点的加权系数越大,噪声越强,加权越小。
从而起到加强信号,抑制噪声的作用。
对于信号,匹配滤波器的相频特性与输入信号的相位谱互补,使输入信号经过匹配滤波器以后,相位谱将全部被补偿掉。
一、简答题注释简答题(每题5分,共20分)或(每题4分,共20分)二、第1章简答题1.从系统和信号的角度看,简述信号检测与估计的研究对象。
答:从系统的角度看,信号检测与估计的研究对象是加性噪声情况信息传输系统中的接收设备。
从信号的角度看,信号检测与估计的研究对象是随机信号或随机过程。
2.简述信号检测与估计的基本任务和所依赖的数学基础。
答:解决信息传输系统接收端信号与数据处理中信息恢复与获取问题,或从被噪声及其他干扰污染的信号中提取、恢复所需的信息。
信号检测与估计所依赖的数学基础是数理统计中贝叶斯统计的贝叶斯统计决策理论和方法。
3.概述信号在传输过程中与噪声混叠在一起的类型。
答:信号在传输过程中,噪声与信号混杂在一起的类型有3种:噪声与信号相加,噪声与信号相乘(衰落效应),噪声与信号卷积(多径效应)。
与信号相加的噪声称为加性噪声,与信号相乘的噪声称为乘性噪声,与信号卷积的噪声称为卷积噪声。
加性噪声是最常见的干扰类型,也是最基本的,因为乘性噪声和卷积噪声的情况均可转换为加性噪声的情况。
三、第2章简答题1.简述匹配滤波器概念及其作用。
答:匹配滤波器是在输入为确定信号加平稳噪声的情况下,使输出信噪比达到最大的线性系统。
匹配滤波器的作用:一是使滤波器输出有用信号成分尽可能强;二是抑制噪声,使滤波器输出噪声成分尽可能小,减小噪声对信号处理的影响。
2.根据匹配滤波器传输函数与输入确定信号及噪声的关系,简述匹配滤波器的原理。
答:匹配滤波器传输函数等于输入确定信号频谱的复共轭除以输入平稳噪声的功率谱密度,再附加相位项T ω-,其中T 为输入确定信号的持续时间或观测时间。
由于匹配滤波器传输函数的幅频特性与输入确定信号的幅频特性成正比,与输入噪声的功率谱密度成反比;对于某个频率点,信号越强,该频率点的加权系数越大,噪声越强,加权越小。
从而起到加强信号,抑制噪声的作用。
对于信号,匹配滤波器的相频特性与输入信号的相位谱互补,使输入信号经过匹配滤波器以后,相位谱将全部被补偿掉。
第二章 随机信号及其统计描述1.求在实数区间[]b a ,内均匀分布的随机变量X 均值和方差。
解: 变量X 的概率密度 ⎪⎪⎩⎪⎪⎨⎧≤≤-=其他,,01)(b x a a b x p均值 []⎰∞∞-+===2)(ba dx x xp X E m X方差 ⎰∞∞--=-=12)()()(222a b dx x p m x X Xσ2.设X 是具有概率密度函数)(x p 的随机变量,令x 的函数为0),exp(>-=a ax y试求随机变量y 的概率密度函数)(y p 。
解: 反函数0,ln 1>-=a y ax 雅可比式为 aydy dx J 1-==所以 0),ln 1(1)ln 1()(>-=-⋅=a y ap ay y a p J y p 4. 随机过程)(t X 为)sin()cos()(00t B t A t X ωω+=式中,0ω是常数,A 和B 是两个互相独立的高斯随机变量,而且0][][==B E A E ,222][][σ==B E A E 。
求)(t X 的均值和自相关函数。
7. 设有状态连续、时间离散的随机过程)2sin()(t t X Ω=π,式中t 只能取正整数,即 ,3,2,1=t ,而Ω为在区间)1,0(上均匀分布的随机变量,试讨论)(t X 的平稳性。
8.平稳随机过程)(t X 的自相关函数为1)10cos(22)(10++=-τττe R X ,求)(t X 均值、二阶原点矩和方差。
解: 可按公式求解[])()0(,)0()(,)(222∞-==∞=X X X X X X R R R t X E R m σ。
但在求解周期性分量时,不能得出)(∞R ,为此把自相关函数分成两部分: ()12)10cos(2)()()(1021++=+=-τττττeR R R X X X由于)10cos(2)(1ττ=X R 的对应的随机过程为 是随机变量为常数,ϕϕA t A t X ),10cos()(1+=所以[]0)(1=t X E而对于12)(102+=-ττeR X ,有1)(2=∞X R ,即[]1)(2±=t X E所以[][][]1)()()(21±=+=t X E t X E t X E 可理解为1)(=∞X R从而有 []5)0()(2==X R t X E ,)()0(2∞-=X X X R R σ=4因此)(t X 的均值、二阶原点矩和方差分别为[]1)(±=t X E []5)(2=t X E 42=X σ9. 若随机过程)(t X 的自相关函数为)cos(21)(0τωτ=X R ,求)(t X 的功率谱密度。
数字信号处理上机实验答案(第三版-第十章)第十章上机实验数字信号处理是一门理论和实际密切结合的课程,为深入掌握课程内容,最好在学习理论的同时,做习题和上机实验。
上机实验不仅可以帮助读者深入的理解和消化基本理论,而且能锻炼初学者的独立解决问题的能力。
本章在第二版的基础上编写了六个实验,前五个实验属基础理论实验,第六个属应用综合实验。
实验一系统响应及系统稳定性。
实验二时域采样与频域采样。
实验三用FFT对信号作频谱分析。
实验四IIR数字滤波器设计及软件实现。
实验五FIR数字滤波器设计与软件实现实验六应用实验——数字信号处理在双音多频拨号系统中的应用任课教师根据教学进度,安排学生上机进行实验。
建议自学的读者在学习完第一章后作实验一;在学习完第三、四章后作实验二和实验三;实验四IIR数字滤波器设计及软件实现在。
学习完第六章进行;实验五在学习完第七章后进行。
实验六综合实验在学习完第七章或者再后些进行;实验六为综合实验,在学习完本课程后再进行。
10.1 实验一: 系统响应及系统稳定性1.实验目的(1)掌握求系统响应的方法。
(2)掌握时域离散系统的时域特性。
(3)分析、观察及检验系统的稳定性。
2.实验原理与方法在时域中,描写系统特性的方法是差分方程和单位脉冲响应,在频域可以用系统函数描述系统特性。
已知输入信号可以由差分方程、单位脉冲响应或系统函数求出系统对于该输入信号的响应,本实验仅在时域求解。
在计算机上适合用递推法求差分方程的解,最简单的方法是采用MATLAB语言的工具箱函数filter函数。
也可以用MATLAB 语言的工具箱函数conv函数计算输入信号和系统的单位脉冲响应的线性卷积,求出系统的响应。
系统的时域特性指的是系统的线性时不变性质、因果性和稳定性。
重点分析实验系统的稳定性,包括观察系统的暂态响应和稳定响应。
系统的稳定性是指对任意有界的输入信号,系统都能得到有界的系统响应。
或者系统的单位脉冲响应满足绝对可和的条件。
《信号检测与估计》第十章习题解答10.1 设线性滤波器的输入信号为()()()t n t s t x +=,其中()[]0E =t s ,()[]0E =t n ,并且已知()ττ-e =S R ,()ττ-2e=N R ,()0=τsn R ,求因果连续维纳滤波器的传递函数。
解:连续维纳滤波器与离散维纳滤波器的形式是相同的,即()()()()+⎦⎤⎢⎣⎡−⋅⋅=s B s P s B s H xs w112opt σ 因此需要求解()t s 的复功率谱和()t x 的时间信号模型。
考虑到信号与噪声不相关,因此观测数据的功率谱就等于信号的复功率谱加上噪声的复功率谱。
对观测数据的复功率谱进行谱分解,就可以得到()t x 的时间信号模型。
()t s 的复功率谱为()()()20s -10s 1-s --121111e e e e s s s d d d s P S −=−++=+==∫∫∫∞−+∞++∞∞−τττττττ ()t n 的复功率谱为()2s -2-44e es d s P N −==∫+∞∞−τττ因此,观测数据的复功率谱为()()()()()()()()()s s s s ss ss s P s P s P N S X −+−++=−+−=+=2211-226441122 取12=w σ()()()()s s ss B +++=2126()()()()()()()()()s s s s s s s s B s P s B s P N xs +=−==1-2-262-2-1-2612--2令()()()s B s P s F xs -=,()τf 是()s F 的拉普拉斯反变换。
要求()τf 是因果的,可将s 平面右半平面的极点扔掉,()()()[]12e 61,e Re e21-s s +=−==∫τττπτs F s ds s F jf C给()τf 取因果,并做拉普拉斯变换,得到()s d s F +⋅+=⋅⋅+=∫∞++11126e e 1260s --τττ()()()()()()())()()122261112626211112opt +++=+×+×+++×=⎦⎤⎢⎣⎡−⋅⋅=+ss ss s s s B s P s B s H xs wσ10.2 设已知()()()n n n s n x +=,以及()()()z z z G S 4.014.0192.01−−=−,()1=z G N ,()0=z G sn ()n s 和()n n 不相关。
()n s 代表所希望得到的信号,()n n 代表加性白噪声。
求其物理可实现的因果维纳滤波器的()z H opt 及()[]min 2E n e ,非因果情况的结果如何?试作比较。
解:首先考虑因果解,维纳滤波器的最佳解为()()()()+−⎦⎤⎢⎣⎡⋅⋅=1211z B z G z B z H xs wopt σ 由于信号与噪声不相关,因此()()z G z G S xs =()()()z G z G z G N S X +=根据()n x 的复功率谱进行谱分解,可以求出()z B 和2w σ()()()()()()()()()()()()z z z z z z z z z z z G z G z G N S X 4.014.012.012.0124.014.014.008.2142.0142.0192.01-1-1-1-1-−−−−=−−+−=+−−=+= 取22=wσ,得到 ()1-1-4.012.01z z z B −−=令()()()1−=z B z G z F xs ,由于信号与噪声不相关,()()z G z G S xs =,因此 ()()()()()()()()()11114.012.0192.04.012.014.014.0192.0−−−−−−=−−−−===z z zz z z z B z G z B z G z F S xs 设()n f 是()z F 的Z 反变换,考虑到要对()n f 取因果,因此不考虑单位圆外的极点,应用留数定理求解:()()()[]n n Cn z z F dz zz F jn f 4.04.0,Res 2111=⋅=⋅=−−∫π对()n f 取因果有()()()()n u n u n f n f n 4.0==+ ()n f +的Z 变换记为()z F +,得到()14.0114.0−+∞=−+−=⋅=∑zz z F n n n因此因果维纳滤波器的最佳解为()()()111122.015.04.0112.014.012111−−−−+−=−×−−×=⋅⋅=z z z z z F z B z H w opt σ()[]()()()[]()()()()()()()()()()()()5.02.0,2.04.0146.0Res 2.04.0146.0212.012.05.04.014.0192.0214.014.0192.02.015.04.014.0192.021211111111min 2=⎥⎦⎤⎢⎣⎡−−=−−=⋅−−⋅−−=⎦⎤⎢⎣⎡−−×−−−−=−=∫∫∫∫−−−−−−−z z dzz z jz dzz z z z j z dz z z z z z jzdz z G z Hz G j n e E C C C Cxsopt Sππππ 非因果情况下,()()()()()()()()()()()()()11112.012.0146.04.014.012.012.0124.014.0192.0−−−−−−=−−−−×−−===z z z z z z z z z G z G z G z G z H X S X xs opt ()[]()()()[]()()()()()()()()()()48232.0,12.012.0146.0Res 2.012.0146.0214.014.0192.02.012.0146.04.014.0192.02121111111min 2=⎥⎦⎤⎢⎣⎡⋅−−=⋅−−=⎦⎤⎢⎣⎡−−×−−−−−=−=−−−−−−∫∫∫z z z z dz z z j z dz z z z z z z jzdzz G z Hz G j n e E C C Cxs optSπππ 10.3 已知一维平稳随机信号()n x 的状态方程和量测方程分别为()()()115.0−+−=k w k x k x 和()()()k n k x k y +=,其中,()k w 、()k n 为白噪声,且()[]1E 2=k w ,()[]1E 2=k n ,以及对于任意k 、l 有()()[]0E =l n k w 和()()[]0E =l n k x 。
(1)列出并化简相应的卡尔曼滤波公式。
(2)分析当∞→k 时,()k P 的极限形式。
解:(1)由状态方程和量测方程可知, 5.01=−k A ,11=−k Γ,1=k C由题可知()[]1E 2==k w k Q ,()[]1E 2==k n k R ,[][]0E E ˆ00===k X X X ()()()zzz z z z G X 5.01325.01345.015.01111−+−=−−=−− 所以()[]15.0134−+−=z z G X()()[]34lim 0==+∞→z G R X z X 所以[][]()3402200====X k R X E X E P 因为滤波增益:[]1T1T 1−−−+=kk k k k k k k k R C P C C P H滤波误差方差:()1−−=k k k k k k P C H I P由预测误差方差T 111T 1111−−−−−−−+=k k k k k k k k ΓQ ΓA P A P 可得225.0111+−=−k k P P由最优预测估计可知11ˆ5.0ˆ−−=k k k X X 由最优滤波估计公式[][][]k k k k k k k k k k k k k k k k k Y P X P Y H X P X C Y H X X +−=+−=−+=−−−−1111ˆ15.0ˆ1ˆˆˆ 于是卡尔曼滤波可简化为如下形式初始条件:()00ˆ=X ,34=P L ,3,2,1=k 滤波误差方差:225.0111+−=−k k P P最优滤波估计:()[]()()k y k x k xk k P P +−−=1ˆ15.0ˆ (2)当∞→k 时,卡尔曼滤波进入稳定状态,这时∞−∞→∞→==P P P 1lim lim k k k k因而可得225.011+−=∞∞P P解之得53.0=∞P因此()[]()()()()k y k x k y k x k xk k 53.01ˆ235.01ˆ15.0ˆ+−=+−−=P P。