星玛电梯资料 ann
- 格式:doc
- 大小:778.50 KB
- 文档页数:30
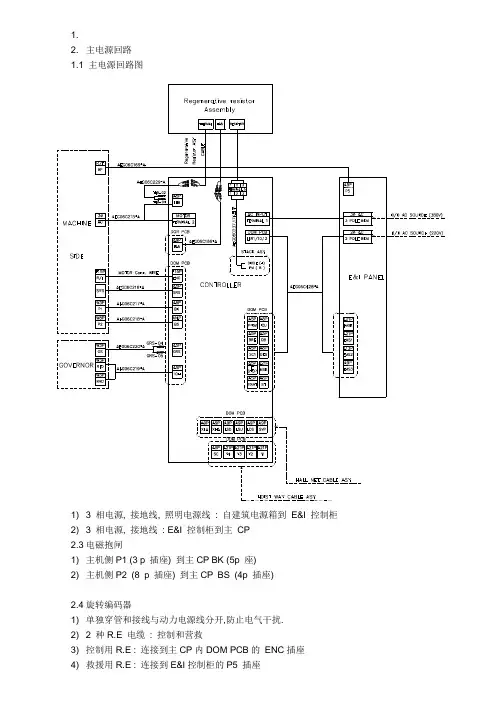
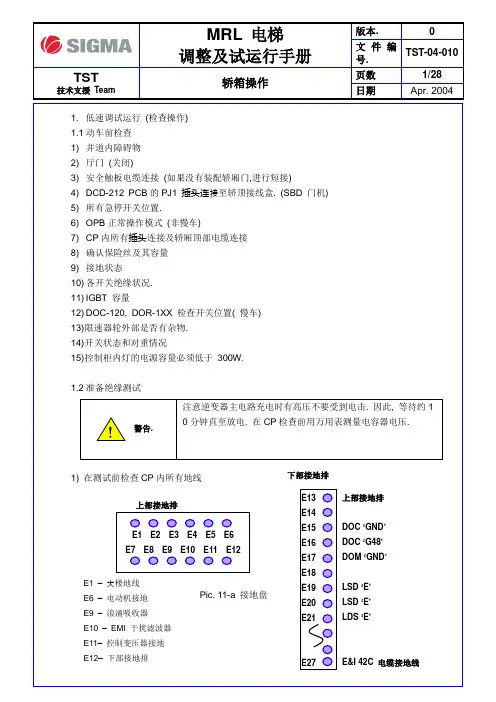
1.2. 主电源回路1.1 主电源回路图1) 3 相电源, 接地线, 照明电源线: 自建筑电源箱到E&I 控制柜2) 3 相电源, 接地线: E&I 控制柜到主CP2.3 电磁抱闸1) 主机侧P1 (3 p 插座) 到主CP BK (5p 座)2) 主机侧P2 (8 p 插座) 到主CP BS (4p 插座)2.4 旋转编码器1) 单独穿管和接线与动力电源线分开,防止电气干扰.2) 2 种R.E 电缆: 控制和营救2.5 限速器1) 限速器装置的OS插头连接主CP内DOM PCB的GRS 插座2) 限速器RTD,RRD的插头连接到主CP内DOM PCB 的10H .2.6 主CP到E&I 控制柜1) 配置: 0.75sq*42C + 2.0sq*6C + 0.5sq*1 pair2) 路线: CP 到E&I 控制柜图. 10-b 随行电缆图3.2 随行电缆安装1) 在轿箱底提供电缆夹, 当电梯在最底层平层时检查随行电缆最低处与地坑地面距离为300±30mm .2.3 4.2) 最顶层限位开关: EVV 8C * 1 根3) 地坑照明开关: EVV 3C * 1 根4) 厅呼梯串行通信电缆5) 层显按钮( EVV * 25C*1 根)厅门, 1st地坑开关, 对讲机,消防开关, 驻停开关, DC24V电源a. 楼层数量>16 : EVV 25C.b. 楼层数量<,= 16 : EVV 21C.3.2 井道电缆布置图3.4呼梯 PCB (DHG PCB)1) HI1: 1#2) HI2 : 2#3) HVF : VIP 开关输入 4) HP : 驻停开关输入 5) HC2 : 2#电梯厅到站钟输出 6) HC1 : 1#电梯厅到站钟输出 7) HF2 : 2#电梯厅到站灯输出 8) HF1 : 1#电梯厅到站灯输出 9) HA : 呼梯通信线 10) HDC : 残疾下呼按钮输入 11) HUC : 残疾上呼按钮输入 12) HD : 普通下呼按钮输入 13) H U : 普通上呼按钮输入 14) 单片机: AT 89C51 导轨1) 1列呼梯2) 2列呼梯4 地坑开关和照明.4.1图. 10-j 地坑开关盒外形图4.2 安装位置1)地坑深度<1550mm5. 轿顶 5.1接线清单1) 参照电气接线图. 电气图出厂放置在 E&I 控制柜内.(1) 平层感应器 (2) 轿内显示(3)(4) (5) 轿门开关 (CDS) 图. 10-k 地坑盒安装b. 地坑开关安装 22) 地坑深度 > 1550mm(6) 门机(7) 轿箱照明/应急灯 (8) 安全钳开关(SCS)/CDFS (9) 检修灯及插座 (插座)(10)(11) 称重装置(PTM/微动开关)(12) TOCI (轿顶检修盒) (13) 风扇(14) BGM 背景音乐扬声器(15) EES(安全窗开关)如果不提供安全窗开关, 参照右图B短接P48V和EES 开关输入.。
一、LG电梯已被OTIS集团收购,改名SIGMA星玛,其电梯型号很多:LG在韩国有两个工厂:昌原(日立合资),仁川(三菱合资)和日立合资的工厂:和日立的YP,YPVF相同,但派生出高速型号HVP1。
和仁川合资的工厂:和三菱SPVF相同,大连工厂最早生产的L/MED电梯就是SPVF的升级型号。
仁川工厂现已完全被三菱收购,L/MED电梯停产。
独立开发的LVP电梯数量较少,后期L/MGP电梯,前年以前生产DI系列(DI1,DL1,DLS,DSI,SI210,SI220,DI2,DI4)现在1.75米以下电梯大量采用韩国SAMIL ELTCH公司(无锡山亿)的控制柜,曳引机采用常熟产品。
型号NEW-DSS。
该控制柜同时也用于小机房电梯。
2米-2.5米电梯还是DI系列DI2,现在也开始使用NEW-DSS控制柜。
3米以上高速梯:早期是日立技术的HVP2,后来有HGP(融入了MGP通讯技术),最后为DI系列DI4。
二、LG早期自己开发的LVP电梯是GOLDSTAR牌子,电路板采用插件形式:MCPU板:运行管理SCPU板:速度控制DRST板:门机、安全回路、10T接触器、机房操作SIGL板:呼梯、开关信号、并联通讯LPHC板:呼梯灯LPIN板:层显ANLG板:电流控制BASE板:GTR晶体管驱动LMTC:监控器,自己制作了这样的监控器,见相册三、MVP电梯和日立YPVF一样,使用的电路板相同,完全互换。
主板:MPU对应MPU6 接口板:FIO对应FIO4或FIO5 轿顶通讯板:SDC SDCL称重板:AD 电流及PWM控制板:ACRA对应ACRA7 基极驱动板:BDC对应BDCC3还有可选的LAMP板负责外呼灯、到站灯、层显等驱动可选的FDD2板用于监控层显四、HVP1电梯相对MVP而言,只是将BDC分开为HBDC和REGN板(分别负责基极驱动和再生驱动)另外多RSC板,用于轿顶MU/MD感应器信号。
老的HVP1还有一些插件板,用于灯的驱动。
星玛电梯轿顶插件说明
星玛电梯轿顶插件说明
简介
•星玛电梯轿顶插件是一款为电梯轿顶配备的创意产品,目的在于提升电梯车厢内的使用体验和美观度。
•本插件由资深创作者团队设计和制造,经过多次测试确保质量和安全性。
•本说明将介绍插件的安装方式,使用方法以及主要功能。
安装方式
•将电梯停靠在楼层,确保电梯停止运行状态。
•打开电梯轿顶,找到适配插件的位置。
•将插件放置在轿顶上方,确保插件与电梯轿顶完美契合。
•使用螺丝刀将插件固定在轿顶上,确保插件稳固不会晃动。
使用方法
•当乘客进入电梯车厢后,插件会自动启动,展示一系列美观度高的图案和照明效果。
•插件的触发器可根据乘客的动作进行调整,例如门关闭时、运行中等。
•乘客可通过触摸屏幕或使用指定的按钮控制插件的样式和效果。
主要功能
•美观性:插件拥有多种图案和照明效果,使电梯乘坐过程更加愉悦。
•互动性:乘客可以通过触摸屏幕或按钮选择不同的插件样式,增加乘坐时的乐趣。
•定制性:创作者团队将为插件提供定制选项,满足不同电梯品牌和风格的需求。
注意事项
•在安装插件之前,请确保电梯轿顶结构完好无损,否则可能影响插件的安全使用。
•本插件仅适用于符合相关安全标准的电梯,不得用于旧型电梯或其它非标准电梯。
•在维护和清洁电梯轿顶时,请先关闭电梯电源,避免与插件造成碰撞或损坏。
•如需要卸下插件,请按照逆向步骤进行,谨慎操作,防止造成不必要的损害。
以上就是星玛电梯轿顶插件的相关说明,希望能够帮助您正确安装和使用本产品。
如有任何疑问或需要进一步帮助,请联系我们专业的售后团队。
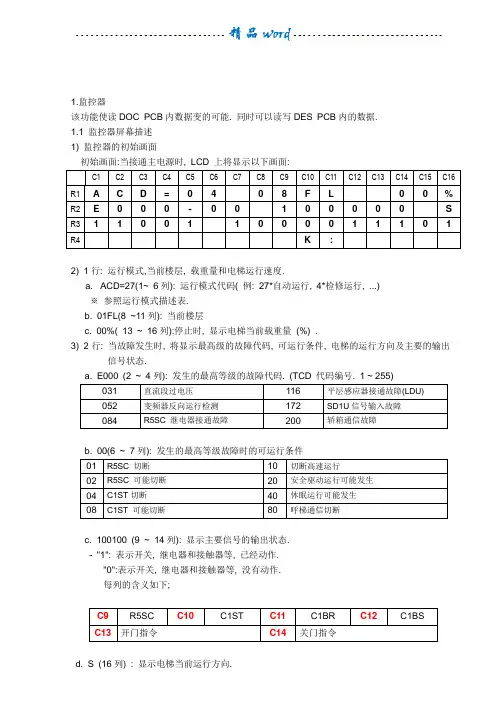
1.监控器该功能使读DOC PCB内数据变的可能. 同时可以读写DES PCB内的数据.1.1 监控器屏幕描述1) 监控器的初始画面初始画面:当接通主电源时, LCD 上将显示以下画面:C1 C2 C3 C4 C5 C6 C7 C8 C9 C10 C11 C12 C13 C14 C15 C16 R1 A C D = 0 4 0 8 F L 0 0 % R2 E 0 0 0 - 0 0 1 0 0 0 0 0 S R3 1 1 0 0 1 1 0 0 0 0 1 1 1 0 1 R4 K :2) 1行: 运行模式,当前楼层, 载重量和电梯运行速度.a. ACD=27(1~ 6列): 运行模式代码( 例: 27*自动运行, 4*检修运行, ...)※参照运行模式描述表.b. 01FL(8 ~11列): 当前楼层c. 00%( 13 ~ 16列):停止时, 显示电梯当前载重量(%) .3) 2行: 当故障发生时, 将显示最高级的故障代码, 可运行条件, 电梯的运行方向及主要的输出信号状态.a. E000 (2 ~ 4列): 发生的最高等级的故障代码. (TCD 代码编号. 1 ~ 255)031 直流段过电压116 平层感应器接通故障(LDU)052 变频器反向运行检测172 SD1U信号输入故障084 R5SC 继电器接通故障200 轿箱通信故障b. 00(6 ~ 7列): 发生的最高等级故障时的可运行条件01 R5SC 切断10 切断高速运行02 R5SC 可能切断20 安全驱动运行可能发生04 C1ST切断40 休眠运行可能发生08 C1ST 可能切断80 呼梯通信切断c. 100100 (9 ~ 14列): 显示主要信号的输出状态.- "1": 表示开关, 继电器和接触器等, 已经动作.-"0":表示开关, 继电器和接触器等, 没有动作.-每列的含义如下;C9 R5SC C10 C1ST C11 C1BR C12 C1BSC13 开门指令C14 关门指令d. S (16列) : 显示电梯当前运行方向.- "S":停止"U": 上行"D": 下行4) 3行: 显示主要信号的输入状态比如开关, 继电器和接触器等.C1 R5SC C5 LDC C9 C1ST C13 CDS C2 48V C6 LDCX C10 C1BR C14 DCLS C3 UL C7 SDS1D C11 Suppress C15 DOLS C4 DL C8 SDS1U C12 LDC C16 SESa. "1":表示开关, 继电器和接触器等, 已经动作.b. "0":表示开关, 继电器和接触器等, 没有动作.5) ACD 代码模式描述模式描述模式描述00 停止01 ALP 运行02 地震控制时门打开03 故障04 检修运行05 地震控制结束06 地震控制07 地震控制低速运行08 最底层运行(规格ROM 或层高故障时)09 层高测量准备0A 层高测量运行0B 最底层低速运行(层高表数据故障时)0C 不使用0D 不使用0E 2次消防运行0F 1次消防运行10 到达运行结束11 地震控制后全层运行12 紧急复归运行13 消防员操作运行14 消防复归运行15 救援到达运行16 救援运行17 救援到达运行结束18 救援返回运行19 火灾运行结束1A 火灾运行1B 机房温度检测运行结束1C 机房温度检测运行1D 不使用1E 紧急发电运行结束1F 紧急发电运行20 控制柜温度检测运行结束21 控制柜温度检测运行22 休眠23 待命运行结束24 独立运行25 司机运行26 备份运行27 自动运行28 空调溢水运行29 LRT 运行(自转角测试)2. 键盘输入运行模式方法分类主号码副号码复位主号码键盘输入副号码键盘输入键盘输入运行相关模式层高测量运行A12E(DES) START 3 FFFF 最底层内选登记A13E(DES)中间层内选登记A14E(DES)最高层内选登记A15E(DES)最底层内选登记(保持)A16E(DES)FFFF 中间层内选登记(保持)A17E(DES)最高层内选登记(保持)A18E(DES)任意层内选登记A19E(DES) xxE -> 楼层存储器相关模式数据读&写A21E(DO+DE)地址增加0FFFFA22E(DO+DE)地址减少8地址输入xxxxE地址再输入BBB保护解除AAE数据输入xxE扫描数据读(当故障发生时扫描5000h ~ )A23E(DO+DE)项目增加0FFFF项目减少8区域增加 1区域减少9扫描数据读当复位发生时扫描4400h ~ )A24E(DO+DE)项目增加0FFFF项目减少8区域增加 1区域减少9统计数据读&删除A25E(DO+DE)项目增加0FFFF项目减少8数据删除CCCC统计数据删除A26E(DO+DE)删除检查 E FFFF 电源正常时复位计数A27E(DO+DE)FFFF 紧急停止扫描数据读A28E(DO+DE)项目增加0FFFF项目减少8所有删除CCCC规格相关模式规格数据读&写A31E(DES) 地址增加0FFFF A32E(DES)地址减小8地址输入xxxxE地址再输入BBB保护解除AAE数据输入xxE故障相关模式TCD 显示A41E(DO+DE)表显示增加0FFFF表显示减少8故障记录显示A42E(DO+DE)表显示增加0表显示减少8首次故障 1FFFF末次故障9显示模式更换 C(时间->扫描)故障记录消除A43E(DO+DE)TCD 消除A44E(DO+DE)DSP 模式DSP 读取A51E(DES)地址增加0FFFF地址减小8地址输入xxxxE地址再次输入BBBDSP 规格书写A52E(DES)参数描述模式无负载点设定A61E(DES) FFFF 满载点设定A62E(DES) 负载输入xxxE FFFF 零负载点调整A64E(DES)半负载点设定A65E(DES) 负载输入xxxE FFFF RTC 设定A69E(DO+DE)数据/时间模式更换 CFFFF数据输入xxE状态检查模式OS ROM 版本检查A01E(DO+DE)FFFF DSP ROM 版本检查A02E(DO+DE)FFFF PCB 保护检查A03E(DO+DE)FFFF门状态检查A71E(DO+DE)FFFF 轿厢负载显示A86E(DO+DE)FFFF装置测试模式门厅检测模式A82E(DO+DE)FFFF 桥厢检查模式A83E(DO+DE)FFFF装置测试模式POSI 测量模式A85E(DES) 向上操作上开关FFFF 向下操作下开关110% 功能测试模式A87E(DES) 测试负载输入(%) xxE FFFFSDS 测试模式A89E(DES) SDS 测试(向上) 3FFFF SDS 测试(向下) 7其它模式LCD 初始化DOC+DES 输入‘0’四次以上FFFF LRT 操作A54E 开始 3 FFFF110% 剪切模式A88E(DES)CRT 数据重启A90E(DOC+DES)其它模式: ‘DEEE’–更换DES PCB ROM版本3. 显示器模式3.1 00000 = LCD 初始化1) 准备a. 检查显示器软件版本b. 连接DOA-100与DOC-120后设定开关3至DOA’ON’的位置’.2) 屏幕检查a. 按'0' 四次以上LCD将在3秒内显示.3.2 A01E = OS ROM 版本检查1) 屏幕检查a. 在第四行输入A01E检查版本号.C1 C2 C3 C4 C5 C6 C7 C8 C9 C10 C11 C12 C13 C14 C15 C16 R1 A C D = 2 7 [ 8 5 ] 5 0 % R2 E 0 0 0 - 0 0 1 0 0 0 0 0 S R3 1 1 0 0 1 1 0 0 0 0 1 1 1 0 1 R4 V 0 1 . 0 0 9 9 / 0 7 / 1 5b. 例) 版本1.0, 编成日期为1999年7月15日.c. 2.5秒后自动重启3.3 A02E = DSP ROM 版本检查1) 屏幕检查a. 在第四行输入A02E后检查版本号及日期.A C D = 2 7 [ 5 ] 5 0 %E 0 0 0 - 0 0 1 0 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 1V O 3 . 0 0 9 9 . 0 7b. 例) 版本3.00, 编成日期为1999年7月.c. 2.5秒后自动重启.3.4 A03E = PCB 保护检查: 此模式只适用韩国范围内1) 屏幕检查a. 如果系统未应用PCB保护功能(出口型)* 在第四行显示"PROTECT DESABLED" .A C D = 2 7 [ 5 ] 5 0 %E 0 0 0 - 0 0 1 0 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 1P R 0 T E C T D I S A B L E D b. 6秒后自动重启.3.5 A12E = 楼层高度测量操作1) 准备a. 检查E&I盘上急停开关是否位于‘停止’位置.2) 屏幕检查a. 输入’A12E’并按’3’后确认ACD = 09 .(此状态将持续至底层DL开关输入.)A C D = 0 9 0 0 F L 0 0 ME 0 0 0 - 0 0 1 0 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 1 W E n a b l e K :b. 当显示‘W Enable’ ,检查DOC PCB上开关2至‘Write’. 此后LCD上将显示FHM MD .c. 当轿厢达到最底层并由DL开关停止, 按3号按钮, 执行楼层高度测量命令.d. LCD 屏幕状态如下;A C D = 0 A [ 0 F ] 1 5 ME 0 0 0 - 0 0 1 0 0 0 0 U1 1 0 0 1 1 0 0 0 0 1 1 1 0 1F H M S T K :f. 当开始楼高测量操作时, 第四行将显示FHM ST.g. 轿厢运行起到UL开关操作.h. 当楼高测量完成, LCD 屏幕状态为;A C D = 0 A [ 1 6 ] 5 0 %E 0 0 0 - 0 0 1 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 1F H M P A S S K :i. 如果FHM成功, 将显示FHM PASS.2) 惯例a. 输入'FFFF' 消除楼高测量操作模式.b. LCD 屏幕状态如下;A C D = 2 7 [ 1 6 ] 5 0 % E 0 0 0 - 0 0 1 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 1K:c. ACD=27 将在自动模式中显示.d. 如果没有显示FHM, 屏幕将显示; A C D = 0 9 [ ] 0 0 M E 0 0 0 - 0 0 1 0 0 0 0 S 1 1 0 0 1 1 0 0 0 0 1 1 1 0 1 FHMFAILK:e. 显示FHM 错误, 表示楼高测量失败.f. 轿厢将自动恢复至底层.3.6 A19E =轿厢呼叫登记 1) 屏幕检查a. 输入‘A19E ’后, 检查第四行是否显示‘CALL ’ . 2) 呼叫a. 12层有呼叫服务, 用十进制键入‘12E ’.3.7 A23E = 故障轨迹数据记取 (故障轨迹数据清除 A22E $3FF2 =>”00”) 1) 屏幕检查a. 输入A23E 后将显示"TRC X-Y"X: 行程的所有阻块号. Y : 当前阻块号.b. 读取较高值项, 输入'0'. 低值项, 输入'8'例) 如果在原始屏幕上输入两次'0', 指示如下. (地址每400将增加1)c. LCD 屏幕A C D = 0 3 [ F ] 5 0 %E 0 0 0 - 0 0 1 0 0 0 0 S0 2 : 5 0 0 8 = 0 0 0 0 0 0 9 1 T R C 3 - 1 K :d. 显示数据及地址为十六进制.e. 读取高级阻块序号, 输入'0'. 低的, 输入'8'例) 如果在A23E原始屏上输入'1'一次, 指示如下. (地址每400将增加1)A C D = 0 3 [ F ] 5 0 %E 0 0 0 - 0 0 1 0 0 0 0 S0 0 : 5 4 0 0 = 0 8 2 4 1 6 2 2 T R C 3 - 2 K :注释] 参照轨迹数据参照方法f. 输入’FFFF’,取消A23E模式3.8 A24E = 重启轨迹读取1) 屏幕检查a. 方法同上述A23E模式.(地址自4400开始)A C D = 0 3 [ F ] 5 0 %E 0 0 0 - 0 0 1 0 0 0 0 S0 0 : 4 4 0 0 = 0 8 2 4 1 6 2 2T R C 3 - 1 K :b. 输入’FFFF ’,取消A24E 模式3.9 A25E = 统计数据读取 1) 屏幕检查a. 输入A25E 后第四行将显示"STA 数据".b. 读取高值数据, 输入'0'. 低值, 输入'8'例) 如果在A25E 原始屏幕上输入'0'两次, 指示如下. LCD 屏幕.c. 消除数据号值, 输入'CCCC'. 但数字1~9无法消除. 例) 如果在数据号12输入"CCCC" , 原始数据将变为'0'.4.输入’FFFF ’取消A25模式3.10 A26E = 统计数据消除 1) 屏幕检查a. 10~22内所有统计数据输入A26E 后消除. A C D = 2 7 [ F ] 5 0 % E 0 0 0 - 0 0 1 0 0 0 0 S S T A D A T A R E S E T [E]ENTERK:b. 取消A26E 模式, 输入'FFFF'.0S A E 1T C 0=A D 0 =0D 2- 0A 70T 0A [4 15K F 0.:]002 03 50k 0 M%SStatistic data NumberStatistic value注释] 参照轨迹数据参考方法0S A E 3T C 0=AD 0 =0 D 2-A 70T 0A[12K F 03:]085 0c 50n 0 t%SStatistic data NumberTotal running count1S A E 2T C 0=AD 0 =0 D 2-A 70T 0A [1 K F 0 :]C0C 0c C 50n C 0 t%S注释] 统计数据单位1) 距离 [km] 2) 时间 [hh:mm:ss] 3) 计数 [cnt]4) 比率 [%]3.11 A27E = 非电源故障重启计数读取 1) 屏幕检查a. 输入A27E 后第四行将显示"重启计数". LCD 屏幕b. 输入’FFFF ’取消A27E 模式c. 当运行记录清除(A43E )完成,非电源故障重启计数将清除.d. 维保经A43E 停止后清除重启计数.3.12 A28E = 急停轨迹数据读取 1) 屏幕检查a.输入A28E 后第四行显示"ESTPxx-yy" . LCD 屏幕b. 第二行 "FL=" 急停产生层, "DATA=" 急停原因与TCD164有关.c. 第三行 "DATE=" 急停产生时间的日期. (7月10日16:15安全回路断开时发生)d. 输入'0' 键显示下一数据,输入’8’键显示下一数据.e. 输入’CCCC ’、进入自动重启模式,清除所有储存数据.f. 'FFFF'可以在未清除数据情况下重启此模式3.12 A31, 32E= SPEC ROM 读/写 1) 准备工作a. 在E &I 盘内设定急停开关至‘Stop ’位置.2) 屏幕检查a. 输入A31E 并确认第四行显示‘SPEC : DAT’ . A C D = 0 3 [ F ] 0 0 % E-1SC R A E n e C 0t sD 0=e =00t 2-0C 701n 0t[1 11K F 00:]011 03 503 0 1%SNon power failure Reset Countthe latest occurred reset (Nov. 1st 13:31)D E A F A S C L T T D =E P =0=025027 7- D /0[A 11T 0K F A :]=16 0: 501 005%2 Total Traced data countThe rank of the present Traced data count1 1 0 0 1 1 0 0 0 0 1 1 1 0 1 S P E C : D A T K :b. 使用HEX进入四-地址进行读取.例.) 如果输入地址'0068', LCD 屏幕状态如下;A C D = 0 3 [ F ] 0 0 %E 0 0 0 - 0 0 1 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 10 0 6 8 : x 0 1 K :c. 地址及数据在HEX内显示.'x01'内'x' 表示HEX 值'01' 为实际数据.d. 地址增加读取地址大于2的数据, 输入'0'.e. 地址减小读取地址小于2的数据,输入'8'.f. 地址输入转化读取数据中若读取其它地址, 输入'BBB'.LCD 屏幕状态A C D = 0 3 [ F ] 0 0 %E 0 0 0 - 0 0 1 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 1A D D R : D A T K :**注释**ⓐ因为规格数据只可使用16BIT的较低的8BITA, 所以必须只能用偶数数据.ⓑ如果错误地输入了奇数数据, 数据将被识别为相应的偶数数据.g. 数据保护取消与数据输入读取地址数据进行校正并输入'AAE'.LCD 屏幕状态A C D = 0 3 [ F ] 0 0 %E 0 0 0 - 0 0 1 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 1 0 0 6 8 : x 0 1 K : A A E** 注释**如果第四行显示‘W enable’, 检查SW2是否处于写保护状态. 再次输入‘AAE’h. 使用输入二-地址数据进行校正.例.)如果校正数据为十进制’13’, 输入'0C'.LCD 屏幕状态A C D = 0 3 [ F ] 0 0 %E 0 0 0 - 0 0 1 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 10 0 6 8 : x 0 1 K : 0 C Ei. 如果书写数据失败, 将显示'FAIL', 当书写规格错误时检查下列各项.* 确认急停开关位于E&I盘的‘Stop’处.* 确保SW2位于‘WE’.* 电梯运行时不要操作SW2.* 数据书写时, 可以输入0x0000~3fff 地址.(实际地址为50000~53FFF.)* 规格书写/读取时在二地址间移动.3.13 A41E = TCD 显示1) 屏幕检查a. 输入A41E.LCD 屏幕状态A C D = 2 7 [ F ] 0 0 %E 1 2 1 - 9 0 0 7 2 0 2 0 1 81 1 0 0 1 1 0 0 0 0 1 1 1 0 1 T 0 4 - 0 1 K :①.第2行第1列~第2行第7列: 显示TCD数据及第一次发生故障操作.②.第4行第1列~第4行第4列: 显示所有发生故障次数.③.第2 行第1列~第2行第8列: 显示'001'表示第一次发生的故障.b. TCD 查询①. 输入’0’按序查询所有故障.②. 倒序查询当前故障, 按'8'.c. 输入’FFFF’退出此模式.3.14 A42E = 故障代码表1) 屏幕检查a. 输入A42E.LCD 屏幕状态A C D = 2 7 [ F ] 0 0 % E 1 2 1 - 9 0 0 7 2 0 2 0 1 8 C n t = 0 0 1 0 7 2 0 2 1 3 2 L O G 0 4 - 0 1 K :①第2行: 显示TCD代码及操作代码.②第2行8~16列: 故障时间, 7月20日8:18 PM③第3行: 故障次数计数并显示如Cnt=xxx.④第3 行8~16列: 故障清除时间, 7月20日9:32 PM⑤第4 行: 显示代码表内代表xx的所有TCD .2) TCD 搜索a. 输入0按序搜索所有故障.b. 输入8倒序搜索当前故障c. 搜索首次故障, 输入‘1’. 输入‘9’搜索最后一次故障.d. 只可以搜索16个故障.e. 故障代码表结构为FIFO.3) 显示模式更改a. 在故障时间模式下输入‘C’ .LCD 屏幕状态.A C D = 2 7 [ 5 ] 0 0 0 M E 1 2 1 - 9 0 0 5 0 % S E 1 F 1 8 0 8 0 0 0 0 0 0 T R C 0 4 - 0 1 K :①第1行: 显示ACD 代码, 当故障发生时的楼层及速度.②第2行: 显示TCD代码及操作代码.③第2行, 8~16列: 轿厢负载及运行方向④第3行: 用hexa代码显示24个主输入及8个输出- C1~C6 8 4 2 1C1 R5SX R5SY R5SC SURPC2 C1ST C1BR DOLS LDSC3 CDS LDU LDC LDDC4 UL SD1U SD2U SD2DC5 SDS1 DL SHOE RDMCC6 Mainte M High R1MM CLS- C8~C9 8 4 2 1C7 R5CS SUPRS C1ST C1BRC8 R2OP R2CL R1MM R2DM* C1的C= 12(十进制) = 8+4 : 输入一般信号R5SX 及R5SY* C2的1= 1(十进制) = 1 : 输入LDC 一般信号* C3的F= 15(十进制) = 8+4+2+1 : 输入CDS,LDU, LDC 及LDD一般信号* C8的7 = 7(十进制) = 8 : 输入SUPRS,C1ST 及C1BR的一般信号* C9的2= 2(十进制) = 2 : 输入R2CL的一般信号- 故障发生时速度曲线.0 1 2 3 4 5 6 7 8停止加速起始加速加速结尾正常速度运行减速起始减速减速结尾速度曲线3.15 A43E = 故障记录表清除1) 屏幕表检查a. 输入A43E.LCD 屏幕状态A C D = 2 7 [ 8 ] 0 0 0 ME 0 5 5 - 0 0 1 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 1 L O G C L E A R※如果继续此模式, 故障内容及痕迹将被消除.b. 显示‘ LOG CLEAR’ 4 秒后, 恢复正常模式(ACD=27).3.16 A51E= DSP 存储器读取1) 屏幕检查a. 输入A51E后, 确认第四行为DSP ADDR.LCD 屏幕状态A C D = 2 7 [ 5 ] 0 0 0 ME 0 0 0 - 0 0 1 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 1D S P A D D R K :b. 输入地址读取四处十六进制数据后, 输入'E'.例.) 如果输入'1000' 地址,LCD 屏幕状态A C D = 2 7 [ 5 ] 0 0 0 ME 0 0 0 - 0 0 1 0 0 0 0 S1 0 0 0 = x 32 1 F A A 5 5D S P A D D R K :①第3行显示地址及数据.②显示地址及数据为十六进制.③'x321F AA55'的'x' 表示十六进制数值, '321F AA55' 为实际值.④数据显示为十六进制的4字节总计.c. 地址增加输入’0’读取数据.显示已经输入的4个较高地址以上的数据.d. 数据减小输入’8’读取低数据.显示已经输入的4个较低地址以下的数据.e. 输入FFFF解除此模式.3.17 A52E = DSP 规格书写1) 准备a. 将急停开关在E&I屏上设至‘Stop’处.b. 检查DPC-11X的J1J开关是否设定至第3第4针用来书写数据.c. 检查DOC-120 PCB的SW2 是否位于‘WRITE’ 位置[如果未执行DSP WRITE, 将发生故障.(=TCD 60)]2) 屏幕检查a. 输入A52E.LCD 屏幕状态A C D = 0 3 [ F ] 0 0 %E 0 0 0 - 0 0 1 0 0 0 0 S1 0 0 0 = x 32 1 F A A 5 5D S P A D D R K :b. 以下特征将按顺序显示在LCD第四行.DSP SPECWAITSUCCESS OR FAILc. 输入FFFF退出此模式.3.18 A54E = 手动LRT 操作1) 操作a. 在E&I盘内设置急停开关至‘RUN’位置.2) 屏幕检查a. 检查ACD=29的操作模式.LCD 屏幕状态A C D = 2 9 [ 5 ] 5 0 %E 0 0 0 - 0 0 1 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 1 R O T M D K :b. 检查轿厢停运后, 按‘3’键开始LCD 屏幕状态A C D = 2 9 [ 5 ] 5 0 %E 0 0 0 - 0 0 1 0 0 0 0 U1 1 0 0 1 1 0 0 0 0 1 1 1 0 1 R O T S T K :c. 之后显示‘ROT ST’d. LRT 操作运行后, 显示‘LRT PASS’LCD 屏幕状态A C D = 2 9 [ 5 ] 5 0 %E 0 0 0 - 0 0 1 0 0 0 0 U1 1 0 0 1 1 0 0 0 0 1 1 1 0 1 L R T P A S S K :3) 提示a. 输入FFFF退出此模式.b. 之后显示ACD=273.19 A61E= 无负载点设定1) 准备a. DE&I盘内设置急停开关至‘STOP’位置.b. 确认DOC-120PCB的SW2位于‘WRITE’位置.c. 确认DOC-120 PCB的R5SC继电器(检查安全回路用)关闭.2) 屏幕检查a. 当通过’A61E’完成‘NO LOAD POINT’ 设定后, 第四行显示'SUCCESS' .LCD 屏幕状态A C D = 0 3 [ 1 6 ] 0 0 %E 0 0 0 - 0 0 1 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 1 S U C C E S S K :※参考①如果轿厢未位于最底层, 第四行显示‘MOV BOT’ .②如果R5SC 继电器没有关闭, 将显示‘R5SC OFF’ .③如果显示‘W Enable’ , 检查DOC PCB的SW2是否位于‘Write’位置.b. 当无负载点设定失败, 将显示'FAIL' .LCD 屏幕状态A C D = 0 3 [ 1 6 ] 0 0 %E 0 0 0 - 0 0 1 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 1F A I L K :如果显示器上显示‘FAIL’ , 现将设定NO LOAD POINT .3.19 A62E= 满载点设定1) 准备a. 将轿厢运行至最底层, 满载100% (POT 传感器)b. 将E&I屏内急停开关设置至‘Stop’处.c. 确认DOC-120PCB的SW2置于WRITE 位置.d. 确认DOC-120 PCB的R5SC (检查安全回路用) 继电器关闭.2) 屏幕检查a. 键入‘A62E’.LCD 屏幕状态.A C D = 0 3 [ 1 6 ] 0 0 %E 0 0 0 - 0 0 1 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 1 L O A D ? K : 1 0 0 E 当第四行显示负载信息时, 用十进制的3个数字键入轿厢内实际负载.例) 100% →100E.b. 满载点设定通过A62E设定后, 第四行显示'SUCCESS' .LCD 屏幕状态A C D = 0 3 [ 1 6 ] 1 0 0 %E 0 0 0 - 0 0 1 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 1 S U C C E S S K :c. 当满载点设定失败后, 显示'FAIL'.LCD 屏幕状态A C D = 0 3 [ 1 6 ] 0 0 %E 0 0 0 - 0 0 1 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 1F A I L K :如果显示器显示‘FAIL’, 现将设定满载点.注释: 满载点设定前必须先进行空载设置.3.21 A69E = 时间设定模式1) 提示a. 确认E&I屏内急停开关位于‘Stop’位置2) 屏幕检测a. 输入A69E后,确认第四行显示RTC SET.b. 第3行, 显示日期和时间.c. 输入’FFFF’两次退出此模式.d. 输入’C’更换日期/时间模式.A C D = 0 3 [ F ] 0 0 %a 9 / 1 7 / 0 7 / S U N1 3 : 5 0 : 3 0R T C S E T K :3) 年, 月, 日及星期几设定a. 更换日期, 输入'C', 确认第四行显示‘DateSet’.b.按顺序输入年, 月, 日进行更改.例.) 输入2004年1月14日(星期三) : 输入‘04E,01E,14E,03E’c. 检查在第四行输入年, 月, 日及星期几.D A T A SE T K : 0 4 E0 4 / K : 0 1 E 0 4 / 0 1 / K : 1 4 E 0 4/1/14K:3Ed. 输入FFFF 退出此模式e. 如果月份及日期设置错误, 显示错误提示. 例.) 第13个月, 25小时等. 4) 时间设定a. 更改时间, 输入'C' 两次, 确认LCD 屏幕第四行显示‘TimeSet’. T I M E S E T K :b. 按顺序输入小时, 分钟, 秒进行更改.例.) 输入P .M 03:45, 30 sec: 键入 15E, 45E, 30E. (24小时计算) c. 检查第四行输入的小时, 分钟, 秒. d. 输入FFFF 退出此模式. T I M E S E T K : 1 5 E 1 5 / K : 4 5 E 1 5 / 4 5 / K : 3 0 E 1 5/45/3K:FFFF3.22 A71E = 门状态检查 1) 屏幕检查a. 输入A71E 后第四行显示"INV DOOR" . LCD 屏b. 第3行 门输出状态O I A E :N C 00VD 00=00D 0- O 30I O 0:R[0 10K 100:]000000000 1%SO : 0 0 0残疾人门信号( '1' On )强迫关门信号输出( '1' On )门CPU 重试信号( '1' On )c. 第3行门输入状态I : 0 0 0 0 0 0 0 0DOOR CPU WDT 信号( '1' 常规)门故障#1门故障#2门故障#3MON 信号( '1' 探测)CLS 信号( '1' 探测)2) 门故障组合门故障3 门故障2 门故障1 门位置0 0 1温度0 1 1电压 1 0 1电流 1 1 1 命令信号 1 1 03.23 A82E = 门厅检查模式1) 提示此模式用来检查门厅B/T ID, 指示器, 门厅呼叫记录指示灯, 门厅信号灯...2) 屏幕检查a. 输入’A82E’后第四行显示"HALL CHK" . 此模式适用于服务操作和OLS ON状态下.LCD 屏幕状态A C D = 2 7 [ F ] 0 0 %E 0 0 0 - 0 0 1 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 1H A L L C H K K :3) 检查点a. DHG PCB的楼层拨码开关设定状态.(十六进制值)b. HA连接器3与4之间的DC24V检查.c. HA正确连接情况下按B/T后,检查B/T灯持续亮2~3秒.d. 检查是否IND 数字, 指示灯及附加灯(检查, 满载)按命令闪烁.e. 当以上2,4项在正常状态下, 自DHG PCB上分离HA连接器.f. 在各层B/T上重复以上a~e项.g. 当所有指示器关闭用来保护PCB防止电震时,自DHG PCB上分离HA连接器.h. 输入’FFFF’取消A82E模式.3.24 A83E = 轿厢检查模式1) 提示此模式用来检查轿厢方面的DCL PCB ID .2) 屏幕检查a.输入A83E后第四行显示"CAR CHECK" . 此模式适用于服务操作及OLS ON的状态下.LCD 屏状态A C D = 2 7 [ F ] 0 0 %E 0 0 0 - 0 0 1 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 1C A R C H K K :b. 按顺序显示楼层特性(B2~B1, 1 ~ 10, 20, 30...).c. 按顺序点亮CPI 灯(上, 下, 满载, 停止服务) .d. 第6秒重复以上a~b 项.e. 输入’FFFF’取消A83E模式.3.25 A85E = POSI 测试模式1) 准备a. E&I盘的ERO 开关必须位于‘ON’位置.POSI测量必须通过E&I盘在门厅内操作.b. 使用E&I盘的上/下按钮运行轿厢c. POSI 测量方法中, 轿厢必须位于最上或最下之外的楼层.d. 轿厢不可以位于门区. 在任何楼层进行操作结果相同.2) 屏幕检查a. 输入A85E, 确认POSI TEST的第四行. (确认ACD = 04.)LCD 屏状态A C D = 0 4 [ F ] 0 0 %E 0 0 0 - 0 0 1 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 1 P O S I T E S T K :①.如果轿厢位于门区, 显示'POSI TEST'.②.如果轿厢脱离门区, 'POSI TEST'显示后显示'UP Drive'.根据LCD屏指示运行轿厢.b. 轿厢位于门区内①. 使用E&I上/下按钮运行轿厢,使这脱离门区.②.如果轿厢脱离门区, 显示'UP DRIVE'表示向上运行.LCD 屏状态A C D = 0 4 [ F ] 0 0 %E 0 0 0 - 0 0 1 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 1 U P D R I V E K :③. 如果显示向上驱动, 在E&I屏内按向上按钮④. 经过门区时测量POSI 特性.⑤. 测量结束后, 'DN Drive'显示表示轿厢向相反方向.LCD 屏状态A C D = 0 4 [ F ] 1 5 ME 0 0 0 - 0 0 1 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 1D N D R I VE K :⑥. 如果显示'DN DRIVE' , 在E&I盘内按下按钮.⑦. 经过轿厢时检查POSI特性.⑧. 如果轿厢脱离门区, 显示'STOP'信息.A C D = 0 4 [ F ] 1 5 ME 0 0 0 - 0 0 1 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 1 S T O P K :c. 如果POSI 测量完成. 第四行显示'POSI FIN'.LCD 屏状态A C D = 0 4 [ F ] 0 0 %E 0 0 0 - 0 0 1 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 1P O S I F I N K :d. 如果测量POSI 失败, 第四行显示'FAIL'.如果POSI测量失败, (FFFF)退出模式后再次进行POSI测量,e. 输入FFFF退出模式.3.26 A86E = 轿厢负载模式1) 屏幕检查a. 输入’A86E’后检查第四是否显示“WD:XXX%’b. ‘XXX’为系计算的轿厢当前负载.LCD 屏状态A C D = 2 7 [ F ] 0 4 %E 0 0 0 - 0 0 1 0 0 0 0 S1 4 F 0 0 0 0 0 0 0 0 0W D : 0 0 4 % K :①第3行的4个数字为通过轨道输入的各负载传感器的AD反向值. 如果应用电位计, 剩下的为最先输入.②第四行的信息‘WD’为计算的实际负载c. 输入FFFF退出模式3.27 A87E = 110% 功能测试模式1) 屏幕检查a. 输入A87E后第四行显示信息"110-> " .LCD 屏状态A C D = 2 7 [ F ] 0 4 %E 0 0 0 - 0 0 1 0 0 0 0 S1 4 F 0 0 0 0 0 0 0 0 01 1 0 - > K :b. 不适当的"110->XX"输入数据为0 至99.例) 若试图用100%负载测试20%的轿厢负载时, 输入"20E".输入”20E”后第四行将显示"110->20" .c. 如果负载超过显示数值, "FULL" 灯亮, BZ 操作及关门限制.d. 输入’FFFF’取消A87E模式.3.28 A88E = 110% 剪切模式* 110% 剪切模式为在检测人员检测情况下可进行一次110%负载运行的一项功能.1) 屏幕检查a. 输入A88E后第四行将显示信息"110% CUT"并于2.5秒后将消息.A C D = 2 7 [ F ] 0 4 % E 0 0 0 - 0 0 1 0 0 0 0 S 1 4 F 0 0 0 0 0 0 0 0 0 1 1%CUTK:b. 轿厢开始运行后模式将自动取消.3.29 A89E = SDS 检查模式 1. 屏幕检查a. 输入A89E 后第四行显示信息"SDS CHK" .b. SDS 操作位置的检查-> 如果轿厢到达最高层, 1U/2U 显示数据为"0000". 运行至最高层后, 测量数据将显示如下;c. 强迫减速功能测试** 提示: 关门空载时进行测试 (DMC S/W ON).轿厢位于中间层以下时键入 "3" 进行向上运行测试. 检查轿厢减速在SDS 操作中是否更改良好 (减速运行直至进行 UL S/W 操作)轿厢位于中间层以上时键入 "7" 进行向下运行测试.检查轿厢减速在SDS 操作中是否更改良好.(减速运行直至进行 DL S/W 操作) 2U S A 1E U D C U :S D :0 =010C200H 700K0 [2 1D K F D ::]:216 77 033 49%S/W operates distance (unit:mm)2U S A 1E U D C U :S D :2=16C 276H 738K4 [2 1D K F D ::]:216 77 033 49%2U S A 1E U D C U :S D :2 =16C 276H 738K 4 [ 2 1D K F D ::]:23 16 77 033 49 % 2U S A 1E U D C U :S D :2 =16C 276H 738K 4 [ 2 1D K F D ::]:27 16 77 033 49%d. 输入’FFFF ’取消A89E 模式.3.30 A90E = CRT 数据重启模式 主板的所有记录的CRT 控制数据重启 (CRT 控制数据: 服务层数据及门定时器) 1) 屏幕检查 ** A C D = 2 7 [ F ] 0 4 % E 0 0 0 - 0 0 1 0 0 0 0 S 1 1 0 0 1 0 0 0 0 0 1 1 1 0 0 C RTRESETK:a. 输入A90E 后第四行将显示信息"CRT Reset" 并于2.5秒后将消除.4. 扫描数据参考方法4.1. 故障记录表参照模式: 正常模式下键入‘A42E ’ 4.2. 按键功能‘0’ : 逻辑故障表内计数增加 ‘8’ : 逻辑故障表内计数减少 ‘1’ : 查看第一次发生的故障TCD ‘9’ : 查看最后一次发生的故障TCD‘C ’ : 显示 TCD 故障发生时间 显示故障扫描数据 (切换) ‘FFFF ’ : 退出故障记录表参考模式* 键盘使用方法与扫描数据显示操作相同.< 故障发生时间显示 >故障发生时间月,日,小时,分均由二位数字表示May 15th14H 20M< 扫描数据显示 >23 22 21 20 19181716 15 14 13 12 R5SX SCS R5SC SUPRS C1ST C1BR DOLS LDS CDS LDU LDC LDD 1110987654321C T A E 1R C 2F CD 201=3010- 0-30 001[0 1K 00:]10006%00 0MU显示发生次序: 所有11次故障的第1次 故障次数 : 当逻辑故障表被清空时初始化故障代码 故障解决时间显示故障发生时的运行模式故障发生时的电梯运行位置故障时运行速度发生的故障代码TCD 故障发生时电梯的运行方向.故障发生时的载重量显示逻辑故障发生次序 故障发生时的输入信号状态参照 A .故障发生时的输出信号状态参照 B .故障发生时的速度曲线阶段参照 C .关于每个故障的附加说明信息.UL SD1U SD2U SD2D SD1D DL SHOE RDMCMaint MHigh R1MM CLSR5SX:辅助安全回路信号 SCS:安全钳开关 R5SC:安全回路 C1ST:主回路接触器 C1BR:抱闸接触器 DOLS:开门限位信号 LDS:厅门开关 CDS:轿门开关 LDU:上平层感应器 * SUPRS : 速度CPU 运行标志 * R1MM : MSK 操作运行信号输入 LDC:平层感应器信号 * Maint M : 机房慢车运行信号输入 * High : 轿箱高速转换开关输入 LDD:下平层感应器信号 UL:上限位 SD1U:上换速开关1 SD2U:上换速开关2 SD1D:下换速开关1 DL:下限位 SHOE:安全触板信号 RDMC:门机切断信号 CLS:关门限位信号 SD2D:下换速开关27 6 5 4 3 2 1 0 R5SCSUPRSC1STC1BRR2OPR2CLR1MLR2DM0 1 2 3 4 5 6 7 8停止加速开始的平滑段稳定加速段加速结束的平滑段正常速度运行减速开始的平滑段稳定减速段减速结束的平滑段速度曲线结束TCD51056707492 96979899114附加信息标志位伺服系统Hexa deci-mal value高速模式 DOC 板 减速比ΦB 错误轿顶慢车 关门限位 关门限位 安全回路 关断故障 1 输入/输出 R7RD 曳引机 ΦA 错误轿内慢车 轿门开关 轿门开关 主接触器 接通故障 2轿箱 额定速度 正常 (轿箱) 厅门开关 厅门开关 抱闸接触器 3 模式正常(俄罗斯机房) 开门限位 开门限位 厅门继电器4厅呼 旋转编码器 开门限位 5电机 平层感应器 6 CRT IGBT上换速开关1 7故障 CT 圈数 下换速开关1 8并联 遮磁板编号机房慢车9 监控器 楼层数 正常(轿箱) A派遣B规格CD服务 E2 段减速时间 F备注某位置1时故 障检测出TCD116117119126130132133134135标志位关断故障 关断故障 下换速开关1 十六进制值 (m/min)十六进制值关门限位 关门限位 关门限位 关门限位 1接通故障 接通故障 下换速开关2 轿门开关 轿门开关 轿门开关 轿门开关 2 上换速开关2 厅门开关 厅门开关 厅门开关 厅门开关 3 上换速开关1 开门限位 开门限位 开门限位 开门限位 4平层继电器(RDZ) 平层继电器(RDZ) 平层继电器(RDZ)56 78 9 A B C D E F强迫换速R e m a r k设置位是0时检测出故障故障检测出时在运行C P U 中记录速度故障发生时的载重量状态 (15t h 位: 最小载重)故障检测出时相应位输入 (有输入时置1)故障检测出时相应位输入 (有输入时置1)故障检测出时相应位输入 (有输入时置1)故障检测出时相应位输入 (有输入时置1)。

1. 系统概要1.1 概要1) Sigma 电梯电源分散和变频控制电梯2) 什么是分散控制系统?系统分配和指派单独的计算机微处理机去独立完成其各自功能.每功能部分的信号由该部分的微处理机独立完成.所有微处理机间通过网络以通信的方式相互连接.这样一来可以提高系统的可靠性,安全性及抗干扰性能.同时对增加功能时也非常方便.3) 系统结构- Si210 控制系统结构图-. 图表-. 分散微处理机的主要功能1) 规格说明2) 控制柜内部件功能* : 选项PCB3) 可应用的外部设备注意: - Di1 电梯应用的Si210 控制屏自2003年1月.- 可以从控制屏的名牌上识别控制屏的类型.2-1. 概要统一控制屏(后称: CP) 指中速电梯的CP(Si1, Di1) 统一为Si210 CP. 典型编号没有因为应用Si210而改变. 例如:1) Di1 电梯的Di1-PA15(1000)-CO-060-08/08, 2) Si1 电梯*的Si1-PA15(1000)-CO-060-08/08-CP上标有CP的类型 .统一前统一后2-2. 主要更改部分: Di1(SAV1,MAV1,DAV1,HAV1)与Si1(SBD1)的区别在于是否应用分散式控制。
分散式控制指门PCB(DCD)与DCL PCB之间的通讯功能, Si1应用此功能.Si1,Di1统一后的CP应用此功能. 但Di1没有反射连接器.因此此功能可以通过使用接线盒的CONN PCB 来实现.DR 电缆轮廓:参照电缆上标签来连接.- 当使用Si210控制柜驱动动Di1电梯, 针对门部门需要进行如下工作.①配线及DR电缆(# AEG05C372)②将DR电缆的插头插入DCL-242 PCB的DRIN/DROUT 插座里.③在DR电缆的别一侧, 连接插针至Y3-01,02, Y4-08,09 和接线端子至TERM1-01.④注意: TERM1-01不是接地线,为P48V线. (如果不连接,将产生TCD 145故障)⑤检查地址$0014中规格数据为$01H.⑥轿厢顶部接线盒与Di1比较没有改变⑦如果门PCB上出现任何故障, 将产生TCD 192 .(参照Y4-08的连接)2) OPB 部分①DCL PCB 改变带Di210 的Di1 (Di1 CP): 应用DCL-240 PCB带Si210 的Di1 (统一CP): 应用DCL-242 PCB②DCL PCB上的DIP开关的功能负载检测器的规格数据(电位计)不同.< DCL-240 PCB >< DCL-242 PCB >3) 轿厢部分Di1与Si1装饰的概念有所区别, 此文件描述了关于控制系统的区别.负载检测器的应用如下:- Di1: 应用微开关和电位计- Si1: 应用压力传感器(韩国)①以上在使用统一CP后仍然应用.②安装过程与以前相同.③负载检测器(微开关与电位计)的调整如下:★规格数据地址: $0018H1) 微开关: $00H2) 电位计X 1EA: $41H3) 电位计X 2EA: $42H★负载补偿(应用电位计时)1) 空载点设定: “ A61E “ (同Di1 CP)2) 满载点设定: “A62E” (保证轿厢100% 负载,在显示器上设定“100E” )→详细情况如下.A62E –满载点设定[预备工作]- 将轿厢放置在最底层并保持轿厢100%满载.- 通过DOR-131 PCB上的正常/停止开关来使其停止.- 在DOC-1XX PCB上设置SW2 至WE.- 空载点设定后执行满载点设定.[检查 LCD]- 按 “A62E” 并检查LCD 是否如下:- 当完成满载点设定, 第四行显示“SUCCESS” .如果失败, 第四行显示“FAIL” .检查LCD 上是否显示当前负载.注意:-如果轿厢不在最底层,第四行显示 “MOVE BOT”. - 如果 R5SC 没有关闭f, “显示 “R5SC”. - 如果 SW2 没有到 WE,显示 “W ENABLE” . -如果空载设定存在问题,显示 “CHK NOLD”.4) 曳引机部件Di1和Si1关于曳引机的区别 ① 关于TM 的抱闸控制系统- Di1: TM 型(TKXS,TKM,TKL,TKXL) / 通过使用BSR,BDR 电阻来对电阻进行控制 - Si1: TM 型(WLC,WMC) / 使用DPB-100 PCB 控制电流. ② 旋转编码器连接(以下称: R.E)Di1: R.E 电缆末端由线套构成连接在DOC-1XX 的AD 线套上. Si1: 由末端带插头的电缆构成并连接在DOM PCB 的“TMLRE” 终端 统一后① 关于TM 的抱闸控制系统- Di1: TM 型(TKXS,TKM,TKL,TKXL) / 通过DPB-100 PCB 控制电流. - Si1: TM 型(WLC,WMC) / 通过 DPB-100 PCB 控制电流. ②R.E 的连接(同前)- Di1: R.E 电缆末端由线套构成连接在DOC-1XX 的AD 线套上.拆除DOC 与DOM PCB当显示 “LOAD ?”, 输入“100E”.- Si1: 由末端带插头的电缆构成并连接在DOM PCB的“TMLRE” 终端5) 电气部分①统一CP图: 1273(H)*750(W)*395(D)②自动公告: 当Di1电梯使用统一后的CP后,按如下操作:Front Side View◆自动公告系统没有类似Di1 CP的改变.◆扬声器(Y3-19,20)的随行电缆与Di1 CP相似.◆随行电缆Y3-19,20连接在SC-08,09而非DOM PCB.◆DOV-200 PCB 位于DOC-1XX PCB后面.◆当使用DOV-200 PCB 设备,规格数据地址为$0014设置为$01.③C1BR, C1ST 接触器(以下称: CTT.)(制造者: LG→INDIA TELCO)④IPM, DPP PCB◆使用S-IPM时15kW 堆与11kW 堆结构相同.即, 没有使用R.IGBT*, 使用DPP-131 PCB, 其它堆设备同等同于11kW. *R.IGBT: 再生IGBT⑤电缆颜色应用⑥ 电动机电力电缆应用乙烯颜色(帽) (自2002年23周)⑦ 应用控制电源的变压器:不同型号门机的电源变压器不同.⑧ ROM 版本 ( 2003年3月)⑨ 随行电缆及 EVV 电缆★ 标准: 信号电缆(36C)+电力电缆(6C)+通讯电缆(2C)如果为 DAV1 门类型: 应用信号电缆(42C)+电力电缆(6C)+通讯电缆(2C). ★ 如果应用Y5, 6, 应增加附加信号电缆(30C). (观光梯, 空调, VMD, 轿厢门关闭设置等..)※附件上有电缆的剖面图.附件 1.随行电缆的剖面图DIV.ColorR,U BlackS,V RedT,W BlueDIV.SBD1Drawing NOAEG02C272*A,B Application-SAV1,MAV1AEG05C368*A DAV1,HAV1AEG05C368*B380, 400, 440V 380, 400, 440VRemarkKorean market only Terminal 12P Terminal 12PDIV.DOC-120 PCB OS ROM M_LON ROM DPC-121 PCB OS ROM V2.02 / V2.03V2.00 / V2.01 V3.01 / V3.20DCL-242 PCBC_LON ROMV2.00 / V2.01Version RemarkROM Type : M27C2001-12F1TKXS TR M/C:V3.01 (TCD58)*BK: 黑, WH: 白附件2. EVV 电缆剖面图附件3. PCB 应用1) PCB 控制屏2) P C B in o th e rs。
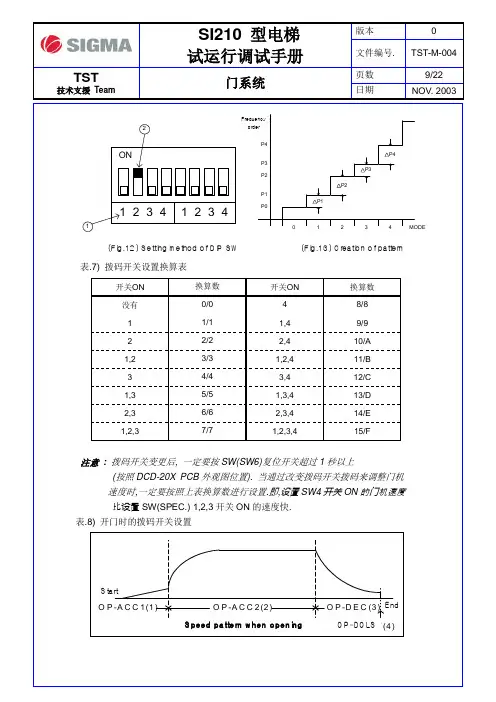
TST技术支援 Team门系统页数 1/22 日期NOV.20031.轿门机的试运行(SAV1)1.1 厅门钩锁及离合器的调整※ 应在厅门设备内调整厅门钩锁及离合器. 地坎L 、地坎C 及轿厢门设备与中心 一致并保持平衡.1)调整厅门钩锁① 确认门与JAMB 和地坎L 的中心一致,间隙精确② 如果吊钩与爪子间隙为2±0.5mm , 开关行程在4±0.5mm 或以下时检查 间隙. (见表1)2)调整离合器① 层门地坎与在轿厢上下运行时的间距 必须保证在8±1mm ,垂直调整使前 后左右小于等于1mm. 层门与轿厢地 坎的标准距离应为30m.(见图2)② 固定额度的离合器调整完毕, 应该进行紧固,用衬套调整离合器 凸轮使在轿门完全关闭情况下可变动的额度大约在72±1mm. 此时,增大衬套的插入,打开的尺寸也同时增大.3)调整门开关凸轮① 调整凸轮与开关的距离为1±0.5mm 或稍小.(见图3) 2±0.5(图1) 厅门钩锁 & 开关112±0.5行程4±0.510±2地坎C地坎L固定8±1(图2) 离合器图纸 72±2 30±2 可变动额度(图3) 凸轮与开关的装配1±0.5mmTST技术支援Team 门系统页数2/22日期NOV.2003②调整凸轮的宽度使其缓慢靠近门,同时调整开门触点尺寸为18±2mm(见图5)③打开开关盖,缓慢靠近门,调整开门触点尺寸为18±2mm(见图6)4)调整安全触板①触板投影:单面触板:35mm双面触板:25mm②使用挡块,确认在门完全打开与关闭时行程是否正常(见表1)表1)安全触板运行距离部分运行位置尺寸两面完全打开时门与触板间距离13±3mm 当门打开一半时48±2mm 门全关时触板间距离6±1mm单面完全打开时门与导触板距离35±2mm当门打开一半时35±2mm门全关时触板间距离35±2mm中心线(图5) 调整凸轮与开关开关凸轮开关开关18±2mm(图6) 调整轿门TST技术支援 Team门系统页数 3/22 日期NOV.2003③安全触板的连接 安全触板应该与轿厢上部接线盒及MIC 连接器连接. 安全触板与关门命令相承接,因此,当安全触板断开时,开门可以进行而无法关门.(见图7)※ 当安全触板断开时,可以开门但不可以关门 (这说明触板与关门命令输入相关连)1.2门设备控制电路(图) 1) 轿门系统① 调整开关包括根据规格在反向或调整过程中的加速/减速开关及用来调整速度模 式的其它开关(SW1~SW5).② VR1用来在PCB 内中心调整低电压的设定.(从中间向右为降低电压,向左为增 大电压)③ 指示灯包括控制柜PCB 的灯(LD2,LD3)来指示开关、门(PCB)的正常的指示灯 (LD4)、IPM 的异常指示灯(LD5)、控制柜PCB 的正常/异常指示灯(LD1)及 DOLS 和DLCS 指示灯(LD7)④ DCD-201 PCB 与DCD-203/4 PCB 的区别*DCD-201 PCB :附在PCB 上的电解电容*DCD203/4 PCB :接线端子位于附在DCD-201 PCB 上的电解电容上. 电解电 容在PCB 外侧(见表2与图8,9) (图7) 安全触板连接SESP48(48V DC) 关门命令 控制柜门 PCBTST技术支援Team 门系统页数4/22日期NOV.2003表2) DCD-201 PCB与DCD-203/4 PCB的区别板类型名称DCD-201 PCB DCD-203 PCB DCD-204 PCB门型 SAV1 MAV1 DAV1电动机输出末端未使用使用使用防嗓音外部电解电容NO YES提供电源(调解器键) 3Φ 100/110V⑤DCD-201 PCB及DCD-203/4 PCB特征DCD-201 PCB 是DC根据SAV1标准,链接端的电解电容器的容量,DCD-20 3/4 PCB与DCD-201 PCB相同,但电解电容器的容量增大至最小临时电压时,可以通过MAV1和DAV1内正常门操作中加长移动电缆进行再生,以此使快速停止简化(见表3)表3)根据门类型名称应用电解电容门型电解电容MOTOR I P MSAV1470㎌50W600V/10AMAV12200㎌80W600V/10ADAV14700㎌200W600V/15A⑥DCD-20X PCB 外部图TST技术支援Team 门系统页数5/22日期NOV.20032)连接器与销钉的描述①门机DCD-20X PCB有四个连接器,功能见表4表4)功能连接器插针号信号功能1 R2CL 关闭命令2 NUDGE 强迫开门运行命令3 SES SES 输出(通常为 48V)4 DMC DC 48V 输入5 SES2 安全触板失效(全部关闭时)6 EARTH 控制柜构架接地7PJ1 8 SS100V S相9 TS100V T相10 R2OP 开门命令11 HCL 残疾人运行命令12 DERR 门故障13 DOLS 完全开门输出14 GND15 SES1(图9) DCD-20X PCB 外部图(MAV1,DAV1)TST技术支援Team 门系统页数6/22日期NOV.2003连接器插针号信号功能1 U 门机U相2 V 门机V相PJ2 3 W 门机W相4 TH2 恒温器输入25 TH1 恒温器输入1连接器插针号信号功能1 PD1 二极管No.1阳极2 PD3 二极管No.3阳极3 PD5 二极管No.5阳极4 VCC DC+15V5 VCCR +15V用来检查没有插入的连接器6 PT3 变压器No.3 EMITTER7 PT1 变压器No.1 EMITTERPJ6 8 PD2 二极管No.3阳极9 PT4 二极管No.1阳极10 GND 接地1112 PT5 变压器No.5 EMITTER13 PT4 变压器No.4 EMITTER14 PT2 变压器No.2 EMITTER3) 通电前检查点(DR电缆:参照系统第9页)①确认PJ1,PJ2 PCB接线端子的电缆没有干扰电路盘②确认门机地线固定在PCB盒盖上.③当通电前手动开关门时,确保手动开/关的力在10~30kg4) 检查连接器电压①在轿厢上部接线盒DMC开关打开时检查连接器电压TST技术支援Team 门系统页数7/22日期NOV.2003②在连接器插头没有插入门PCB的情况下,如果轿厢接线盒上门的安全开关打开,输出电压必如表5表5)供电情况下插针输出电压连接插针号信号检查点电压4 DMC No.4 ~ 14(接地) DC 48V6 EARTH No.6(F.G接地)~14번(GND接地) 0 V8 SS100V No.8~9 .插针 8~17 见♠PJ1 9 TS100V No.9~8 插针 9~17 见♠12 DERR No.12 ~ 14(GND) 0 V13 DOLS No.13 ~ 14(GND) 0 V14 GND 0 V17 RS100V No.17~8.插针 No.17~9 见♠♠:适用于SAV1型,AC 100V适用于MAV1,DAV1型,AC110V※如果No.8↔9, 8↔17, 9↔17间电压的区别在AC100V±20V(低电压)或稍高,门PCB 不能很好地进行操作. 因此,检查控制柜与轿厢上部接线盒之间的连接,确认控制柜是否提供了电源.1.3 门机驱动测试1) 检查轿厢门开关与挡块①确认在开关门时,挡块是否有轻轻接触②轿门开关的操作应该如表6测试者在断电缓慢关门时检查轿门开关的操作(见图6,表11)表6)门开关的操作位置部分运行位置门开关关门前 9mm内③关闭DMC开关插入连接器后,打开DMC开关检查门的驱动YESD.M.C 开关打开TST技术支援 Team门系统页数 8/22 日期NOV.2003④ 根据低速模式开关操作进行门的操作a) 慢车:门始终打开(on-car 和in-car 相同) b) In-car :门的驱动,关门按钮必须打开 c) On-car :关门按钮必须打开2) 门驱动检查点① 在检查线端安全触板开关触点的触点电阻(等于小于10Ω) ② 检查检测器的调整状态③ 根据on-car 操作开关检查门的操作 ※ SAV1:如果按重启键,LD2每隔几秒闪烁 MAV1:如果按重启键,LD3每隔几秒闪烁DAV1:如果按重启键,LD2和LD3每隔几秒同时闪烁1.4 调整图形1) 拨码开关的功能及设定方法如图13所示,门的速度图示由增加∆P1,∆P2及原始模式0的P0构成 (或31关开始,模式0,开门开始,模式31). PCB 上存储的增加值是通过拨码开关的对重值增加的. 换算为十六进制的对重值由在PCB 内的拨码开关决定. 打开越多的开关(见图10.2)换算值就越大(见表7). 因此,为了增加增大门的速度值,就要多打开拨码开关的. 拨码开关设定见表8,9.DOLS 输出← 门开关 →操作← DOLS → 移动48V 0 V 48V 0V 全 打开(图11) 开关操作及输出。
星玛电梯资料系统
1. 系统概要
1.1 概要
1) MRL 电梯
电源分散及变频控制电梯
2) 什么是分散控制系统?
系统分配和指派单独的计算机微处理机去独立完成其各自功能.每功能部分的
信号由该部分的微处理机独立完成.所有微处理机间通过网络以通信的方式相互连接.这样一来可以提高系统的可靠性,安全性及抗干扰性能.同时对增加功能时也非常方便.
2. 系统结构
2.1 si220 系统构成图
2.2 分散控制器的主要功能
2.3 主要规格
1)规格
2) 控制柜内功能区说明
* : 可选 PCB
3) 可应用的外部设备
4) 变频发动机应用表。
1.监控器该功能使读DOC PCB内数据变的可能. 同时可以读写DES PCB内的数据.1.1 监控器屏幕描述1) 监控器的初始画面初始画面:当接通主电源时, LCD 上将显示以下画面:C1 C2 C3 C4 C5 C6 C7 C8 C9 C10 C11 C12 C13 C14 C15 C16 R1 A C D = 0 4 0 8 F L 0 0 % R2 E 0 0 0 - 0 0 1 0 0 0 0 0 S R3 1 1 0 0 1 1 0 0 0 0 1 1 1 0 1 R4 K :2) 1行: 运行模式,当前楼层, 载重量和电梯运行速度.a. ACD=27(1~ 6列): 运行模式代码( 例: 27*自动运行, 4*检修运行, ...)※参照运行模式描述表.b. 01FL(8 ~11列): 当前楼层c. 00%( 13 ~ 16列):停止时, 显示电梯当前载重量(%) .3) 2行: 当故障发生时, 将显示最高级的故障代码, 可运行条件, 电梯的运行方向及主要的输出信号状态.a. E000 (2 ~ 4列): 发生的最高等级的故障代码. (TCD 代码编号. 1 ~ 255)031 直流段过电压116 平层感应器接通故障(LDU)052 变频器反向运行检测172 SD1U信号输入故障084 R5SC 继电器接通故障200 轿箱通信故障b. 00(6 ~ 7列): 发生的最高等级故障时的可运行条件01 R5SC 切断10 切断高速运行02 R5SC 可能切断20 安全驱动运行可能发生04 C1ST切断40 休眠运行可能发生08 C1ST 可能切断80 呼梯通信切断c. 100100 (9 ~ 14列): 显示主要信号的输出状态.- "1": 表示开关, 继电器和接触器等, 已经动作.-"0":表示开关, 继电器和接触器等, 没有动作.-每列的含义如下;C9 R5SC C10 C1ST C11 C1BR C12 C1BSC13 开门指令C14 关门指令d. S (16列) : 显示电梯当前运行方向.- "S":停止"U": 上行"D": 下行4) 3行: 显示主要信号的输入状态比如开关, 继电器和接触器等.C1 R5SC C5 LDC C9 C1ST C13 CDS C2 48V C6 LDCX C10 C1BR C14 DCLS C3 UL C7 SDS1D C11 Suppress C15 DOLS C4 DL C8 SDS1U C12 LDC C16 SESa. "1":表示开关, 继电器和接触器等, 已经动作.b. "0":表示开关, 继电器和接触器等, 没有动作.5) ACD 代码模式描述模式描述模式描述00 停止01 ALP 运行02 地震控制时门打开03 故障04 检修运行05 地震控制结束06 地震控制07 地震控制低速运行08 最底层运行(规格ROM 或层高故障时)09 层高测量准备0A 层高测量运行0B 最底层低速运行(层高表数据故障时)0C 不使用0D 不使用0E 2次消防运行0F 1次消防运行10 到达运行结束11 地震控制后全层运行12 紧急复归运行13 消防员操作运行14 消防复归运行15 救援到达运行16 救援运行17 救援到达运行结束18 救援返回运行19 火灾运行结束1A 火灾运行1B 机房温度检测运行结束1C 机房温度检测运行1D 不使用1E 紧急发电运行结束1F 紧急发电运行20 控制柜温度检测运行结束21 控制柜温度检测运行22 休眠23 待命运行结束24 独立运行25 司机运行26 备份运行27 自动运行28 空调溢水运行29 LRT 运行(自转角测试)2. 键盘输入运行模式方法分类主号码副号码复位主号码键盘输入副号码键盘输入键盘输入运行相关模式层高测量运行A12E(DES) START 3 FFFF 最底层内选登记A13E(DES)中间层内选登记A14E(DES)最高层内选登记A15E(DES)最底层内选登记(保持)A16E(DES)FFFF 中间层内选登记(保持)A17E(DES)最高层内选登记(保持)A18E(DES)任意层内选登记A19E(DES) xxE -> 楼层存储器相关模式数据读&写A21E(DO+DE)地址增加0FFFFA22E(DO+DE)地址减少8地址输入xxxxE地址再输入BBB保护解除AAE数据输入xxE扫描数据读(当故障发生时扫描5000h ~ )A23E(DO+DE)项目增加0FFFF项目减少8区域增加 1区域减少9扫描数据读当复位发生时扫描4400h ~ )A24E(DO+DE)项目增加0FFFF项目减少8区域增加 1区域减少9统计数据读&删除A25E(DO+DE)项目增加0FFFF项目减少8数据删除CCCC统计数据删除A26E(DO+DE)删除检查 E FFFF 电源正常时复位计数A27E(DO+DE)FFFF 紧急停止扫描数据读A28E(DO+DE)项目增加0FFFF项目减少8所有删除CCCC规格相关模式规格数据读&写A31E(DES) 地址增加0FFFF A32E(DES)地址减小8地址输入xxxxE地址再输入BBB保护解除AAE数据输入xxE故障相关模式TCD 显示A41E(DO+DE)表显示增加0FFFF表显示减少8故障记录显示A42E(DO+DE)表显示增加0表显示减少8首次故障 1FFFF末次故障9显示模式更换 C(时间->扫描)故障记录消除A43E(DO+DE)TCD 消除A44E(DO+DE)DSP 模式DSP 读取A51E(DES)地址增加0FFFF地址减小8地址输入xxxxE地址再次输入BBBDSP 规格书写A52E(DES)参数描述模式无负载点设定A61E(DES) FFFF 满载点设定A62E(DES) 负载输入xxxE FFFF 零负载点调整A64E(DES)半负载点设定A65E(DES) 负载输入xxxE FFFF RTC 设定A69E(DO+DE)数据/时间模式更换 CFFFF数据输入xxE状态检查模式OS ROM 版本检查A01E(DO+DE)FFFF DSP ROM 版本检查A02E(DO+DE)FFFF PCB 保护检查A03E(DO+DE)FFFF门状态检查A71E(DO+DE)FFFF 轿厢负载显示A86E(DO+DE)FFFF装置测试模式门厅检测模式A82E(DO+DE)FFFF 桥厢检查模式A83E(DO+DE)FFFF装置测试模式POSI 测量模式A85E(DES) 向上操作上开关FFFF 向下操作下开关110% 功能测试模式A87E(DES) 测试负载输入(%) xxE FFFFSDS 测试模式A89E(DES) SDS 测试(向上) 3FFFF SDS 测试(向下) 7其它模式LCD 初始化DOC+DES 输入‘0’四次以上FFFF LRT 操作A54E 开始 3 FFFF110% 剪切模式A88E(DES)CRT 数据重启A90E(DOC+DES)其它模式: ‘DEEE’–更换DES PCB ROM版本3. 显示器模式3.1 00000 = LCD 初始化1) 准备a. 检查显示器软件版本b. 连接DOA-100与DOC-120后设定开关3至DOA’ON’的位置’.2) 屏幕检查a. 按'0' 四次以上LCD将在3秒内显示.3.2 A01E = OS ROM 版本检查1) 屏幕检查a. 在第四行输入A01E检查版本号.C1 C2 C3 C4 C5 C6 C7 C8 C9 C10 C11 C12 C13 C14 C15 C16 R1 A C D = 2 7 [ 8 5 ] 5 0 % R2 E 0 0 0 - 0 0 1 0 0 0 0 0 S R3 1 1 0 0 1 1 0 0 0 0 1 1 1 0 1 R4 V 0 1 . 0 0 9 9 / 0 7 / 1 5b. 例) 版本1.0, 编成日期为1999年7月15日.c. 2.5秒后自动重启3.3 A02E = DSP ROM 版本检查1) 屏幕检查a. 在第四行输入A02E后检查版本号及日期.A C D = 2 7 [ 5 ] 5 0 %E 0 0 0 - 0 0 1 0 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 1V O 3 . 0 0 9 9 . 0 7b. 例) 版本3.00, 编成日期为1999年7月.c. 2.5秒后自动重启.3.4 A03E = PCB 保护检查: 此模式只适用韩国范围内1) 屏幕检查a. 如果系统未应用PCB保护功能(出口型)* 在第四行显示"PROTECT DESABLED" .A C D = 2 7 [ 5 ] 5 0 %E 0 0 0 - 0 0 1 0 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 1P R 0 T E C T D I S A B L E D b. 6秒后自动重启.3.5 A12E = 楼层高度测量操作1) 准备a. 检查E&I盘上急停开关是否位于‘停止’位置.2) 屏幕检查a. 输入’A12E’并按’3’后确认ACD = 09 .(此状态将持续至底层DL开关输入.)A C D = 0 9 0 0 F L 0 0 ME 0 0 0 - 0 0 1 0 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 1 W E n a b l e K :b. 当显示‘W Enable’ ,检查DOC PCB上开关2至‘Write’. 此后LCD上将显示FHM MD .c. 当轿厢达到最底层并由DL开关停止, 按3号按钮, 执行楼层高度测量命令.d. LCD 屏幕状态如下;A C D = 0 A [ 0 F ] 1 5 ME 0 0 0 - 0 0 1 0 0 0 0 U1 1 0 0 1 1 0 0 0 0 1 1 1 0 1F H M S T K :f. 当开始楼高测量操作时, 第四行将显示FHM ST.g. 轿厢运行起到UL开关操作.h. 当楼高测量完成, LCD 屏幕状态为;A C D = 0 A [ 1 6 ] 5 0 %E 0 0 0 - 0 0 1 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 1F H M P A S S K :i. 如果FHM成功, 将显示FHM PASS.2) 惯例a. 输入'FFFF' 消除楼高测量操作模式.b. LCD 屏幕状态如下;A C D = 2 7 [ 1 6 ] 5 0 % E 0 0 0 - 0 0 1 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 1K:c. ACD=27 将在自动模式中显示.d. 如果没有显示FHM, 屏幕将显示; A C D = 0 9 [ ] 0 0 M E 0 0 0 - 0 0 1 0 0 0 0 S 1 1 0 0 1 1 0 0 0 0 1 1 1 0 1 FHMFAILK:e. 显示FHM 错误, 表示楼高测量失败.f. 轿厢将自动恢复至底层.3.6 A19E =轿厢呼叫登记 1) 屏幕检查a. 输入‘A19E ’后, 检查第四行是否显示‘CALL ’ . 2) 呼叫a. 12层有呼叫服务, 用十进制键入‘12E ’.3.7 A23E = 故障轨迹数据记取 (故障轨迹数据清除 A22E $3FF2 =>”00”) 1) 屏幕检查a. 输入A23E 后将显示"TRC X-Y"X: 行程的所有阻块号. Y : 当前阻块号.b. 读取较高值项, 输入'0'. 低值项, 输入'8'例) 如果在原始屏幕上输入两次'0', 指示如下. (地址每400将增加1)c. LCD 屏幕A C D = 0 3 [ F ] 5 0 %E 0 0 0 - 0 0 1 0 0 0 0 S0 2 : 5 0 0 8 = 0 0 0 0 0 0 9 1 T R C 3 - 1 K :d. 显示数据及地址为十六进制.e. 读取高级阻块序号, 输入'0'. 低的, 输入'8'例) 如果在A23E原始屏上输入'1'一次, 指示如下. (地址每400将增加1)A C D = 0 3 [ F ] 5 0 %E 0 0 0 - 0 0 1 0 0 0 0 S0 0 : 5 4 0 0 = 0 8 2 4 1 6 2 2 T R C 3 - 2 K :注释] 参照轨迹数据参照方法f. 输入’FFFF’,取消A23E模式3.8 A24E = 重启轨迹读取1) 屏幕检查a. 方法同上述A23E模式.(地址自4400开始)A C D = 0 3 [ F ] 5 0 %E 0 0 0 - 0 0 1 0 0 0 0 S0 0 : 4 4 0 0 = 0 8 2 4 1 6 2 2T R C 3 - 1 K :b. 输入’FFFF ’,取消A24E 模式3.9 A25E = 统计数据读取 1) 屏幕检查a. 输入A25E 后第四行将显示"STA 数据".b. 读取高值数据, 输入'0'. 低值, 输入'8'例) 如果在A25E 原始屏幕上输入'0'两次, 指示如下. LCD 屏幕.c. 消除数据号值, 输入'CCCC'. 但数字1~9无法消除. 例) 如果在数据号12输入"CCCC" , 原始数据将变为'0'.4.输入’FFFF ’取消A25模式3.10 A26E = 统计数据消除 1) 屏幕检查a. 10~22内所有统计数据输入A26E 后消除. A C D = 2 7 [ F ] 5 0 % E 0 0 0 - 0 0 1 0 0 0 0 S S T A D A T A R E S E T [E]ENTERK:b. 取消A26E 模式, 输入'FFFF'.0S A E 1T C 0=A D 0 =0D 2- 0A 70T 0A [4 15K F 0.:]002 03 50k 0 M%SStatistic data NumberStatistic value注释] 参照轨迹数据参考方法0S A E 3T C 0=AD 0 =0 D 2-A 70T 0A[12K F 03:]085 0c 50n 0 t%SStatistic data NumberTotal running count1S A E 2T C 0=AD 0 =0 D 2-A 70T 0A [1 K F 0 :]C0C 0c C 50n C 0 t%S注释] 统计数据单位1) 距离 [km] 2) 时间 [hh:mm:ss] 3) 计数 [cnt]4) 比率 [%]3.11 A27E = 非电源故障重启计数读取 1) 屏幕检查a. 输入A27E 后第四行将显示"重启计数". LCD 屏幕b. 输入’FFFF ’取消A27E 模式c. 当运行记录清除(A43E )完成,非电源故障重启计数将清除.d. 维保经A43E 停止后清除重启计数.3.12 A28E = 急停轨迹数据读取 1) 屏幕检查a.输入A28E 后第四行显示"ESTPxx-yy" . LCD 屏幕b. 第二行 "FL=" 急停产生层, "DATA=" 急停原因与TCD164有关.c. 第三行 "DATE=" 急停产生时间的日期. (7月10日16:15安全回路断开时发生)d. 输入'0' 键显示下一数据,输入’8’键显示下一数据.e. 输入’CCCC ’、进入自动重启模式,清除所有储存数据.f. 'FFFF'可以在未清除数据情况下重启此模式3.12 A31, 32E= SPEC ROM 读/写 1) 准备工作a. 在E &I 盘内设定急停开关至‘Stop ’位置.2) 屏幕检查a. 输入A31E 并确认第四行显示‘SPEC : DAT’ . A C D = 0 3 [ F ] 0 0 % E-1SC R A E n e C 0t sD 0=e =00t 2-0C 701n 0t[1 11K F 00:]011 03 503 0 1%SNon power failure Reset Countthe latest occurred reset (Nov. 1st 13:31)D E A F A S C L T T D =E P =0=025027 7- D /0[A 11T 0K F A :]=16 0: 501 005%2 Total Traced data countThe rank of the present Traced data count1 1 0 0 1 1 0 0 0 0 1 1 1 0 1 S P E C : D A T K :b. 使用HEX进入四-地址进行读取.例.) 如果输入地址'0068', LCD 屏幕状态如下;A C D = 0 3 [ F ] 0 0 %E 0 0 0 - 0 0 1 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 10 0 6 8 : x 0 1 K :c. 地址及数据在HEX内显示.'x01'内'x' 表示HEX 值'01' 为实际数据.d. 地址增加读取地址大于2的数据, 输入'0'.e. 地址减小读取地址小于2的数据,输入'8'.f. 地址输入转化读取数据中若读取其它地址, 输入'BBB'.LCD 屏幕状态A C D = 0 3 [ F ] 0 0 %E 0 0 0 - 0 0 1 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 1A D D R : D A T K :**注释**ⓐ因为规格数据只可使用16BIT的较低的8BITA, 所以必须只能用偶数数据.ⓑ如果错误地输入了奇数数据, 数据将被识别为相应的偶数数据.g. 数据保护取消与数据输入读取地址数据进行校正并输入'AAE'.LCD 屏幕状态A C D = 0 3 [ F ] 0 0 %E 0 0 0 - 0 0 1 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 1 0 0 6 8 : x 0 1 K : A A E** 注释**如果第四行显示‘W enable’, 检查SW2是否处于写保护状态. 再次输入‘AAE’h. 使用输入二-地址数据进行校正.例.)如果校正数据为十进制’13’, 输入'0C'.LCD 屏幕状态A C D = 0 3 [ F ] 0 0 %E 0 0 0 - 0 0 1 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 10 0 6 8 : x 0 1 K : 0 C Ei. 如果书写数据失败, 将显示'FAIL', 当书写规格错误时检查下列各项.* 确认急停开关位于E&I盘的‘Stop’处.* 确保SW2位于‘WE’.* 电梯运行时不要操作SW2.* 数据书写时, 可以输入0x0000~3fff 地址.(实际地址为50000~53FFF.)* 规格书写/读取时在二地址间移动.3.13 A41E = TCD 显示1) 屏幕检查a. 输入A41E.LCD 屏幕状态A C D = 2 7 [ F ] 0 0 %E 1 2 1 - 9 0 0 7 2 0 2 0 1 81 1 0 0 1 1 0 0 0 0 1 1 1 0 1 T 0 4 - 0 1 K :①.第2行第1列~第2行第7列: 显示TCD数据及第一次发生故障操作.②.第4行第1列~第4行第4列: 显示所有发生故障次数.③.第2 行第1列~第2行第8列: 显示'001'表示第一次发生的故障.b. TCD 查询①. 输入’0’按序查询所有故障.②. 倒序查询当前故障, 按'8'.c. 输入’FFFF’退出此模式.3.14 A42E = 故障代码表1) 屏幕检查a. 输入A42E.LCD 屏幕状态A C D = 2 7 [ F ] 0 0 % E 1 2 1 - 9 0 0 7 2 0 2 0 1 8 C n t = 0 0 1 0 7 2 0 2 1 3 2 L O G 0 4 - 0 1 K :①第2行: 显示TCD代码及操作代码.②第2行8~16列: 故障时间, 7月20日8:18 PM③第3行: 故障次数计数并显示如Cnt=xxx.④第3 行8~16列: 故障清除时间, 7月20日9:32 PM⑤第4 行: 显示代码表内代表xx的所有TCD .2) TCD 搜索a. 输入0按序搜索所有故障.b. 输入8倒序搜索当前故障c. 搜索首次故障, 输入‘1’. 输入‘9’搜索最后一次故障.d. 只可以搜索16个故障.e. 故障代码表结构为FIFO.3) 显示模式更改a. 在故障时间模式下输入‘C’ .LCD 屏幕状态.A C D = 2 7 [ 5 ] 0 0 0 M E 1 2 1 - 9 0 0 5 0 % S E 1 F 1 8 0 8 0 0 0 0 0 0 T R C 0 4 - 0 1 K :①第1行: 显示ACD 代码, 当故障发生时的楼层及速度.②第2行: 显示TCD代码及操作代码.③第2行, 8~16列: 轿厢负载及运行方向④第3行: 用hexa代码显示24个主输入及8个输出- C1~C6 8 4 2 1C1 R5SX R5SY R5SC SURPC2 C1ST C1BR DOLS LDSC3 CDS LDU LDC LDDC4 UL SD1U SD2U SD2DC5 SDS1 DL SHOE RDMCC6 Mainte M High R1MM CLS- C8~C9 8 4 2 1C7 R5CS SUPRS C1ST C1BRC8 R2OP R2CL R1MM R2DM* C1的C= 12(十进制) = 8+4 : 输入一般信号R5SX 及R5SY* C2的1= 1(十进制) = 1 : 输入LDC 一般信号* C3的F= 15(十进制) = 8+4+2+1 : 输入CDS,LDU, LDC 及LDD一般信号* C8的7 = 7(十进制) = 8 : 输入SUPRS,C1ST 及C1BR的一般信号* C9的2= 2(十进制) = 2 : 输入R2CL的一般信号- 故障发生时速度曲线.0 1 2 3 4 5 6 7 8停止加速起始加速加速结尾正常速度运行减速起始减速减速结尾速度曲线3.15 A43E = 故障记录表清除1) 屏幕表检查a. 输入A43E.LCD 屏幕状态A C D = 2 7 [ 8 ] 0 0 0 ME 0 5 5 - 0 0 1 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 1 L O G C L E A R※如果继续此模式, 故障内容及痕迹将被消除.b. 显示‘ LOG CLEAR’ 4 秒后, 恢复正常模式(ACD=27).3.16 A51E= DSP 存储器读取1) 屏幕检查a. 输入A51E后, 确认第四行为DSP ADDR.LCD 屏幕状态A C D = 2 7 [ 5 ] 0 0 0 ME 0 0 0 - 0 0 1 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 1D S P A D D R K :b. 输入地址读取四处十六进制数据后, 输入'E'.例.) 如果输入'1000' 地址,LCD 屏幕状态A C D = 2 7 [ 5 ] 0 0 0 ME 0 0 0 - 0 0 1 0 0 0 0 S1 0 0 0 = x 32 1 F A A 5 5D S P A D D R K :①第3行显示地址及数据.②显示地址及数据为十六进制.③'x321F AA55'的'x' 表示十六进制数值, '321F AA55' 为实际值.④数据显示为十六进制的4字节总计.c. 地址增加输入’0’读取数据.显示已经输入的4个较高地址以上的数据.d. 数据减小输入’8’读取低数据.显示已经输入的4个较低地址以下的数据.e. 输入FFFF解除此模式.3.17 A52E = DSP 规格书写1) 准备a. 将急停开关在E&I屏上设至‘Stop’处.b. 检查DPC-11X的J1J开关是否设定至第3第4针用来书写数据.c. 检查DOC-120 PCB的SW2 是否位于‘WRITE’ 位置[如果未执行DSP WRITE, 将发生故障.(=TCD 60)]2) 屏幕检查a. 输入A52E.LCD 屏幕状态A C D = 0 3 [ F ] 0 0 %E 0 0 0 - 0 0 1 0 0 0 0 S1 0 0 0 = x 32 1 F A A 5 5D S P A D D R K :b. 以下特征将按顺序显示在LCD第四行.DSP SPECWAITSUCCESS OR FAILc. 输入FFFF退出此模式.3.18 A54E = 手动LRT 操作1) 操作a. 在E&I盘内设置急停开关至‘RUN’位置.2) 屏幕检查a. 检查ACD=29的操作模式.LCD 屏幕状态A C D = 2 9 [ 5 ] 5 0 %E 0 0 0 - 0 0 1 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 1 R O T M D K :b. 检查轿厢停运后, 按‘3’键开始LCD 屏幕状态A C D = 2 9 [ 5 ] 5 0 %E 0 0 0 - 0 0 1 0 0 0 0 U1 1 0 0 1 1 0 0 0 0 1 1 1 0 1 R O T S T K :c. 之后显示‘ROT ST’d. LRT 操作运行后, 显示‘LRT PASS’LCD 屏幕状态A C D = 2 9 [ 5 ] 5 0 %E 0 0 0 - 0 0 1 0 0 0 0 U1 1 0 0 1 1 0 0 0 0 1 1 1 0 1 L R T P A S S K :3) 提示a. 输入FFFF退出此模式.b. 之后显示ACD=273.19 A61E= 无负载点设定1) 准备a. DE&I盘内设置急停开关至‘STOP’位置.b. 确认DOC-120PCB的SW2位于‘WRITE’位置.c. 确认DOC-120 PCB的R5SC继电器(检查安全回路用)关闭.2) 屏幕检查a. 当通过’A61E’完成‘NO LOAD POINT’ 设定后, 第四行显示'SUCCESS' .LCD 屏幕状态A C D = 0 3 [ 1 6 ] 0 0 %E 0 0 0 - 0 0 1 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 1 S U C C E S S K :※参考①如果轿厢未位于最底层, 第四行显示‘MOV BOT’ .②如果R5SC 继电器没有关闭, 将显示‘R5SC OFF’ .③如果显示‘W Enable’ , 检查DOC PCB的SW2是否位于‘Write’位置.b. 当无负载点设定失败, 将显示'FAIL' .LCD 屏幕状态A C D = 0 3 [ 1 6 ] 0 0 %E 0 0 0 - 0 0 1 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 1F A I L K :如果显示器上显示‘FAIL’ , 现将设定NO LOAD POINT .3.19 A62E= 满载点设定1) 准备a. 将轿厢运行至最底层, 满载100% (POT 传感器)b. 将E&I屏内急停开关设置至‘Stop’处.c. 确认DOC-120PCB的SW2置于WRITE 位置.d. 确认DOC-120 PCB的R5SC (检查安全回路用) 继电器关闭.2) 屏幕检查a. 键入‘A62E’.LCD 屏幕状态.A C D = 0 3 [ 1 6 ] 0 0 %E 0 0 0 - 0 0 1 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 1 L O A D ? K : 1 0 0 E 当第四行显示负载信息时, 用十进制的3个数字键入轿厢内实际负载.例) 100% →100E.b. 满载点设定通过A62E设定后, 第四行显示'SUCCESS' .LCD 屏幕状态A C D = 0 3 [ 1 6 ] 1 0 0 %E 0 0 0 - 0 0 1 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 1 S U C C E S S K :c. 当满载点设定失败后, 显示'FAIL'.LCD 屏幕状态A C D = 0 3 [ 1 6 ] 0 0 %E 0 0 0 - 0 0 1 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 1F A I L K :如果显示器显示‘FAIL’, 现将设定满载点.注释: 满载点设定前必须先进行空载设置.3.21 A69E = 时间设定模式1) 提示a. 确认E&I屏内急停开关位于‘Stop’位置2) 屏幕检测a. 输入A69E后,确认第四行显示RTC SET.b. 第3行, 显示日期和时间.c. 输入’FFFF’两次退出此模式.d. 输入’C’更换日期/时间模式.A C D = 0 3 [ F ] 0 0 %a 9 / 1 7 / 0 7 / S U N1 3 : 5 0 : 3 0R T C S E T K :3) 年, 月, 日及星期几设定a. 更换日期, 输入'C', 确认第四行显示‘DateSet’.b.按顺序输入年, 月, 日进行更改.例.) 输入2004年1月14日(星期三) : 输入‘04E,01E,14E,03E’c. 检查在第四行输入年, 月, 日及星期几.D A T A SE T K : 0 4 E0 4 / K : 0 1 E 0 4 / 0 1 / K : 1 4 E 0 4/1/14K:3Ed. 输入FFFF 退出此模式e. 如果月份及日期设置错误, 显示错误提示. 例.) 第13个月, 25小时等. 4) 时间设定a. 更改时间, 输入'C' 两次, 确认LCD 屏幕第四行显示‘TimeSet’. T I M E S E T K :b. 按顺序输入小时, 分钟, 秒进行更改.例.) 输入P .M 03:45, 30 sec: 键入 15E, 45E, 30E. (24小时计算) c. 检查第四行输入的小时, 分钟, 秒. d. 输入FFFF 退出此模式. T I M E S E T K : 1 5 E 1 5 / K : 4 5 E 1 5 / 4 5 / K : 3 0 E 1 5/45/3K:FFFF3.22 A71E = 门状态检查 1) 屏幕检查a. 输入A71E 后第四行显示"INV DOOR" . LCD 屏b. 第3行 门输出状态O I A E :N C 00VD 00=00D 0- O 30I O 0:R[0 10K 100:]000000000 1%SO : 0 0 0残疾人门信号( '1' On )强迫关门信号输出( '1' On )门CPU 重试信号( '1' On )c. 第3行门输入状态I : 0 0 0 0 0 0 0 0DOOR CPU WDT 信号( '1' 常规)门故障#1门故障#2门故障#3MON 信号( '1' 探测)CLS 信号( '1' 探测)2) 门故障组合门故障3 门故障2 门故障1 门位置0 0 1温度0 1 1电压 1 0 1电流 1 1 1 命令信号 1 1 03.23 A82E = 门厅检查模式1) 提示此模式用来检查门厅B/T ID, 指示器, 门厅呼叫记录指示灯, 门厅信号灯...2) 屏幕检查a. 输入’A82E’后第四行显示"HALL CHK" . 此模式适用于服务操作和OLS ON状态下.LCD 屏幕状态A C D = 2 7 [ F ] 0 0 %E 0 0 0 - 0 0 1 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 1H A L L C H K K :3) 检查点a. DHG PCB的楼层拨码开关设定状态.(十六进制值)b. HA连接器3与4之间的DC24V检查.c. HA正确连接情况下按B/T后,检查B/T灯持续亮2~3秒.d. 检查是否IND 数字, 指示灯及附加灯(检查, 满载)按命令闪烁.e. 当以上2,4项在正常状态下, 自DHG PCB上分离HA连接器.f. 在各层B/T上重复以上a~e项.g. 当所有指示器关闭用来保护PCB防止电震时,自DHG PCB上分离HA连接器.h. 输入’FFFF’取消A82E模式.3.24 A83E = 轿厢检查模式1) 提示此模式用来检查轿厢方面的DCL PCB ID .2) 屏幕检查a.输入A83E后第四行显示"CAR CHECK" . 此模式适用于服务操作及OLS ON的状态下.LCD 屏状态A C D = 2 7 [ F ] 0 0 %E 0 0 0 - 0 0 1 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 1C A R C H K K :b. 按顺序显示楼层特性(B2~B1, 1 ~ 10, 20, 30...).c. 按顺序点亮CPI 灯(上, 下, 满载, 停止服务) .d. 第6秒重复以上a~b 项.e. 输入’FFFF’取消A83E模式.3.25 A85E = POSI 测试模式1) 准备a. E&I盘的ERO 开关必须位于‘ON’位置.POSI测量必须通过E&I盘在门厅内操作.b. 使用E&I盘的上/下按钮运行轿厢c. POSI 测量方法中, 轿厢必须位于最上或最下之外的楼层.d. 轿厢不可以位于门区. 在任何楼层进行操作结果相同.2) 屏幕检查a. 输入A85E, 确认POSI TEST的第四行. (确认ACD = 04.)LCD 屏状态A C D = 0 4 [ F ] 0 0 %E 0 0 0 - 0 0 1 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 1 P O S I T E S T K :①.如果轿厢位于门区, 显示'POSI TEST'.②.如果轿厢脱离门区, 'POSI TEST'显示后显示'UP Drive'.根据LCD屏指示运行轿厢.b. 轿厢位于门区内①. 使用E&I上/下按钮运行轿厢,使这脱离门区.②.如果轿厢脱离门区, 显示'UP DRIVE'表示向上运行.LCD 屏状态A C D = 0 4 [ F ] 0 0 %E 0 0 0 - 0 0 1 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 1 U P D R I V E K :③. 如果显示向上驱动, 在E&I屏内按向上按钮④. 经过门区时测量POSI 特性.⑤. 测量结束后, 'DN Drive'显示表示轿厢向相反方向.LCD 屏状态A C D = 0 4 [ F ] 1 5 ME 0 0 0 - 0 0 1 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 1D N D R I VE K :⑥. 如果显示'DN DRIVE' , 在E&I盘内按下按钮.⑦. 经过轿厢时检查POSI特性.⑧. 如果轿厢脱离门区, 显示'STOP'信息.A C D = 0 4 [ F ] 1 5 ME 0 0 0 - 0 0 1 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 1 S T O P K :c. 如果POSI 测量完成. 第四行显示'POSI FIN'.LCD 屏状态A C D = 0 4 [ F ] 0 0 %E 0 0 0 - 0 0 1 0 0 0 0 S1 1 0 0 1 1 0 0 0 0 1 1 1 0 1P O S I F I N K :d. 如果测量POSI 失败, 第四行显示'FAIL'.如果POSI测量失败, (FFFF)退出模式后再次进行POSI测量,e. 输入FFFF退出模式.3.26 A86E = 轿厢负载模式1) 屏幕检查a. 输入’A86E’后检查第四是否显示“WD:XXX%’b. ‘XXX’为系计算的轿厢当前负载.LCD 屏状态A C D = 2 7 [ F ] 0 4 %E 0 0 0 - 0 0 1 0 0 0 0 S1 4 F 0 0 0 0 0 0 0 0 0W D : 0 0 4 % K :①第3行的4个数字为通过轨道输入的各负载传感器的AD反向值. 如果应用电位计, 剩下的为最先输入.②第四行的信息‘WD’为计算的实际负载c. 输入FFFF退出模式3.27 A87E = 110% 功能测试模式1) 屏幕检查a. 输入A87E后第四行显示信息"110-> " .LCD 屏状态A C D = 2 7 [ F ] 0 4 %E 0 0 0 - 0 0 1 0 0 0 0 S1 4 F 0 0 0 0 0 0 0 0 01 1 0 - > K :b. 不适当的"110->XX"输入数据为0 至99.例) 若试图用100%负载测试20%的轿厢负载时, 输入"20E".输入”20E”后第四行将显示"110->20" .c. 如果负载超过显示数值, "FULL" 灯亮, BZ 操作及关门限制.d. 输入’FFFF’取消A87E模式.3.28 A88E = 110% 剪切模式* 110% 剪切模式为在检测人员检测情况下可进行一次110%负载运行的一项功能.1) 屏幕检查a. 输入A88E后第四行将显示信息"110% CUT"并于2.5秒后将消息.A C D = 2 7 [ F ] 0 4 % E 0 0 0 - 0 0 1 0 0 0 0 S 1 4 F 0 0 0 0 0 0 0 0 0 1 1%CUTK:b. 轿厢开始运行后模式将自动取消.3.29 A89E = SDS 检查模式 1. 屏幕检查a. 输入A89E 后第四行显示信息"SDS CHK" .b. SDS 操作位置的检查-> 如果轿厢到达最高层, 1U/2U 显示数据为"0000". 运行至最高层后, 测量数据将显示如下;c. 强迫减速功能测试** 提示: 关门空载时进行测试 (DMC S/W ON).轿厢位于中间层以下时键入 "3" 进行向上运行测试. 检查轿厢减速在SDS 操作中是否更改良好 (减速运行直至进行 UL S/W 操作)轿厢位于中间层以上时键入 "7" 进行向下运行测试.检查轿厢减速在SDS 操作中是否更改良好.(减速运行直至进行 DL S/W 操作) 2U S A 1E U D C U :S D :0 =010C200H 700K0 [2 1D K F D ::]:216 77 033 49%S/W operates distance (unit:mm)2U S A 1E U D C U :S D :2=16C 276H 738K4 [2 1D K F D ::]:216 77 033 49%2U S A 1E U D C U :S D :2 =16C 276H 738K 4 [ 2 1D K F D ::]:23 16 77 033 49 % 2U S A 1E U D C U :S D :2 =16C 276H 738K 4 [ 2 1D K F D ::]:27 16 77 033 49%d. 输入’FFFF ’取消A89E 模式.3.30 A90E = CRT 数据重启模式 主板的所有记录的CRT 控制数据重启 (CRT 控制数据: 服务层数据及门定时器) 1) 屏幕检查 ** A C D = 2 7 [ F ] 0 4 % E 0 0 0 - 0 0 1 0 0 0 0 S 1 1 0 0 1 0 0 0 0 0 1 1 1 0 0 C RTRESETK:a. 输入A90E 后第四行将显示信息"CRT Reset" 并于2.5秒后将消除.4. 扫描数据参考方法4.1. 故障记录表参照模式: 正常模式下键入‘A42E ’ 4.2. 按键功能‘0’ : 逻辑故障表内计数增加 ‘8’ : 逻辑故障表内计数减少 ‘1’ : 查看第一次发生的故障TCD ‘9’ : 查看最后一次发生的故障TCD‘C ’ : 显示 TCD 故障发生时间 显示故障扫描数据 (切换) ‘FFFF ’ : 退出故障记录表参考模式* 键盘使用方法与扫描数据显示操作相同.< 故障发生时间显示 >故障发生时间月,日,小时,分均由二位数字表示May 15th14H 20M< 扫描数据显示 >23 22 21 20 19181716 15 14 13 12 R5SX SCS R5SC SUPRS C1ST C1BR DOLS LDS CDS LDU LDC LDD 1110987654321C T A E 1R C 2F CD 201=3010- 0-30 001[0 1K 00:]10006%00 0MU显示发生次序: 所有11次故障的第1次 故障次数 : 当逻辑故障表被清空时初始化故障代码 故障解决时间显示故障发生时的运行模式故障发生时的电梯运行位置故障时运行速度发生的故障代码TCD 故障发生时电梯的运行方向.故障发生时的载重量显示逻辑故障发生次序 故障发生时的输入信号状态参照 A .故障发生时的输出信号状态参照 B .故障发生时的速度曲线阶段参照 C .关于每个故障的附加说明信息.UL SD1U SD2U SD2D SD1D DL SHOE RDMCMaint MHigh R1MM CLSR5SX:辅助安全回路信号 SCS:安全钳开关 R5SC:安全回路 C1ST:主回路接触器 C1BR:抱闸接触器 DOLS:开门限位信号 LDS:厅门开关 CDS:轿门开关 LDU:上平层感应器 * SUPRS : 速度CPU 运行标志 * R1MM : MSK 操作运行信号输入 LDC:平层感应器信号 * Maint M : 机房慢车运行信号输入 * High : 轿箱高速转换开关输入 LDD:下平层感应器信号 UL:上限位 SD1U:上换速开关1 SD2U:上换速开关2 SD1D:下换速开关1 DL:下限位 SHOE:安全触板信号 RDMC:门机切断信号 CLS:关门限位信号 SD2D:下换速开关27 6 5 4 3 2 1 0 R5SCSUPRSC1STC1BRR2OPR2CLR1MLR2DM0 1 2 3 4 5 6 7 8停止加速开始的平滑段稳定加速段加速结束的平滑段正常速度运行减速开始的平滑段稳定减速段减速结束的平滑段速度曲线结束TCD51056707492 96979899114附加信息标志位伺服系统Hexa deci-mal value高速模式 DOC 板 减速比ΦB 错误轿顶慢车 关门限位 关门限位 安全回路 关断故障 1 输入/输出 R7RD 曳引机 ΦA 错误轿内慢车 轿门开关 轿门开关 主接触器 接通故障 2轿箱 额定速度 正常 (轿箱) 厅门开关 厅门开关 抱闸接触器 3 模式正常(俄罗斯机房) 开门限位 开门限位 厅门继电器4厅呼 旋转编码器 开门限位 5电机 平层感应器 6 CRT IGBT上换速开关1 7故障 CT 圈数 下换速开关1 8并联 遮磁板编号机房慢车9 监控器 楼层数 正常(轿箱) A派遣B规格CD服务 E2 段减速时间 F备注某位置1时故 障检测出TCD116117119126130132133134135标志位关断故障 关断故障 下换速开关1 十六进制值 (m/min)十六进制值关门限位 关门限位 关门限位 关门限位 1接通故障 接通故障 下换速开关2 轿门开关 轿门开关 轿门开关 轿门开关 2 上换速开关2 厅门开关 厅门开关 厅门开关 厅门开关 3 上换速开关1 开门限位 开门限位 开门限位 开门限位 4平层继电器(RDZ) 平层继电器(RDZ) 平层继电器(RDZ)56 78 9 A B C D E F强迫换速R e m a r k设置位是0时检测出故障故障检测出时在运行C P U 中记录速度故障发生时的载重量状态 (15t h 位: 最小载重)故障检测出时相应位输入 (有输入时置1)故障检测出时相应位输入 (有输入时置1)故障检测出时相应位输入 (有输入时置1)故障检测出时相应位输入 (有输入时置1)。