凸优化经典算法宝典
- 格式:pdf
- 大小:212.82 KB
- 文档页数:6
凸优化可行域法
凸优化是一类特殊形式的数学优化问题,其中目标函数和约束条件都是凸函数。
在凸优化中,可行域法是一种常见的方法,它专注于确定问题的可行解的集合,即满足约束条件的解。
可行域法的一般步骤如下:
1. 定义问题:将凸优化问题明确定义,包括目标函数和约束条件。
2. 确定可行域:找到问题的可行解的集合,即满足所有约束条件的解。
可行域通常是凸集,因为约束条件是凸的。
3. 选择算法:选择适当的算法来在可行域中寻找最优解。
常用的算法包括梯度下降、内点法、投影梯度法等。
4. 迭代求解:使用选择的算法进行迭代,逐步逼近最优解。
在每次迭代中,算法都会在当前解的附近搜索更好的解。
5. 判断收敛:监控算法的收敛性,确保迭代在某种条件下停止。
这可能涉及到目标函数值的变化、梯度的大小、或者其他收敛标准。
6. 解释结果:解释算法的输出,即在可行域中找到的最优解。
这可能涉及到问题的实际背景和意义。
需要注意的是,可行域法适用于凸优化问题,因为凸优化问题的可行解集合是凸集。
对于非凸问题,可行域法可能无法找到全局最优解,因为非凸问题的解空间可能包含多个局部最优解。
在实践中,具体的可行域方法和算法选择取决于问题的特性和约束条件的形式。
凸优化问题广泛应用于许多领域,包括机器学习、信号处理、运筹学等。
凸优化问题的解法与应用凸优化问题是指满足下列条件的优化问题:目标函数是凸函数,约束条件是凸集合。
凸优化问题是最优化问题中的一类比较特殊的问题,也是应用非常广泛的一类问题。
凸优化问题在工业、金融、电力、交通、通信等各个领域都有着广泛的应用。
本文将介绍凸优化问题的基本概念、解法和应用。
一、凸优化问题的基本概念1. 凸函数凸函数是指函数的图形总是位于函数上方的函数,即满足下列不等式:$$f(\alpha x_1 + (1-\alpha)x_2) \le \alpha f(x_1) + (1-\alpha) f(x_2),\quad x_1, x_2 \in \mathbb{R}, 0 \le \alpha \le 1$$凸函数有很多种性质,如单调性、上凸性、下凸性、严格凸性等,这些性质都与函数的图形有关。
凸函数的图形总是呈现出向上凸起的形状。
2. 凸集合凸集合是指集合内任意两点间的线段都被整个集合所包含的集合。
凸集合有很多常见的例子,如球、多面体、凸多边形、圆等。
凸集合的特点在于其内部任意两点之间都可以通过一条线段相连。
3. 凸组合凸组合是指将若干个向量按照一定比例相加后所得到的向量。
具体地,对于$n$个向量$x_1, x_2, \cdots, x_n$,它们的凸组合定义为:$$\alpha_1 x_1 + \alpha_2 x_2 + \cdots + \alpha_n x_n, \quad\alpha_1 + \alpha_2 + \cdots + \alpha_n = 1, \quad \alpha_i \ge 0 $$凸组合可以看做是加权平均的一种特殊形式。
在凸优化问题中,凸组合常常被用来表示优化变量之间的关系。
二、凸优化问题的解法凸优化问题可以用很多方法来求解,其中比较常用的有梯度下降算法、最小二乘法、线性规划、二次规划、半定规划等。
1. 梯度下降算法梯度下降算法是一种基于梯度信息的优化算法。
凸优化处理方法一、引言凸优化是一类重要且广泛应用的数学问题求解方法。
在实际问题中,我们常常需要优化一个目标函数,同时满足一些约束条件。
凸优化处理方法就是解决这类问题的有效工具。
本文将介绍凸优化的基本概念和处理方法,包括问题的建模、优化算法、收敛性分析等方面。
二、凸优化的基本概念凸优化是指目标函数和约束条件都是凸函数的优化问题。
凸函数是指函数的图像上任意两点的连线位于函数图像的上方。
凸函数具有许多有用的性质,例如局部最小值也是全局最小值等。
因此,凸优化问题具有较好的可解性和稳定性。
三、凸优化问题的建模凸优化问题的一般形式为:$$\begin{align*}\min_{x} & \quad f(x) \\\text{s.t.} & \quad g_i(x) \leq 0, \quad i=1,2,\dots,m \\& \quad h_j(x) = 0, \quad j=1,2,\dots,p\end{align*}$$其中,$x$是优化变量,$f(x)$是目标函数,$g_i(x)$是不等式约束条件,$h_j(x)$是等式约束条件。
这个问题的目标是找到一个$x$的取值,使得目标函数最小化,并且满足所有的约束条件。
四、凸优化的处理方法凸优化问题的处理方法主要有两类:一类是基于一阶导数的方法,另一类是基于二阶导数的方法。
1. 基于一阶导数的方法基于一阶导数的方法主要有梯度下降法和牛顿法。
梯度下降法是一种迭代的方法,通过不断沿着目标函数的负梯度方向更新变量的取值,直到收敛到最优解。
牛顿法则是通过利用目标函数的二阶导数信息进行迭代,求解目标函数的最优解。
这两种方法在凸优化问题中都有较好的效果。
2. 基于二阶导数的方法基于二阶导数的方法主要有拟牛顿法和内点法。
拟牛顿法是一种近似求解牛顿法的方法,通过构造目标函数的二阶导数矩阵的逆矩阵近似来求解最优解。
内点法则是一种通过将不可行问题转化为可行问题来求解的方法,通过引入惩罚项来逼近不可行的约束条件,从而求解最优解。

凸优化证明题摘要:一、引言二、凸优化基本概念1.凸函数2.凸优化问题三、凸优化证明方法1.解析法2.梯度下降法3.牛顿法四、凸优化证明题实例解析1.解析法实例2.梯度下降法实例3.牛顿法实例五、结论正文:一、引言凸优化是运筹学中的一个重要分支,它在很多领域都有广泛的应用,例如机器学习、信号处理、经济学等。
凸优化问题的解决可以帮助我们找到最优解,从而提高效率和降低成本。
在解决凸优化问题时,证明是一个关键环节。
本文将介绍凸优化证明题的解题方法。
二、凸优化基本概念1.凸函数凸函数是指在其定义域内,任意两点之间的函数值都大于等于这两点连线的函数。
凸函数的图像呈现出一种向上凸起的形状。
2.凸优化问题凸优化问题是指在给定凸函数目标函数和凸约束条件下,寻找一个最优解的问题。
凸优化问题的解具有最优性,即任意其他解都至少和最优解一样差。
三、凸优化证明方法1.解析法解析法是凸优化证明中最常用的方法。
它主要通过分析目标函数和约束条件的性质,推导出最优解的存在性和唯一性。
2.梯度下降法梯度下降法是一种迭代优化算法,它是解决凸优化问题的有效工具。
通过计算目标函数的梯度,并不断更新解的方向,最终可以收敛到最优解。
3.牛顿法牛顿法是一种二阶优化算法,它具有更快的收敛速度。
牛顿法通过计算目标函数的二阶梯度,并更新解的方向,同样可以收敛到最优解。
四、凸优化证明题实例解析1.解析法实例假设我们要解决以下凸优化问题:最小化:f(x) = x^2约束条件:g(x) = x - 1 ≤ 0我们可以通过解析法证明,该问题的最优解为x=1。
2.梯度下降法实例我们继续以上述凸优化问题为例,使用梯度下降法求解。
初始解:x0 = 2学习率:α= 0.1迭代次数:T = 100通过梯度下降法,我们可以得到最优解x≈1.0000。
3.牛顿法实例我们再以上述凸优化问题为例,使用牛顿法求解。
初始解:x0 = 2迭代次数:T = 10通过牛顿法,我们可以得到最优解x≈1.0000。
分布式凸优化算法分布式凸优化算法是在分布式环境下解决凸优化问题的一种方法。
在现实应用中,由于数据量大、计算量大、问题复杂等因素,往往需要利用分布式计算资源来进行高效的求解。
分布式凸优化算法通过将问题分解为多个子问题,并分配给不同的节点进行计算和优化,然后通过节点间的通信和协作来实现全局最优解的求解。
分布式凸优化算法的核心思想是将原问题分解为多个子问题,并将这些子问题分配给不同的计算节点进行处理。
在每个节点上,需要通过优化算法来求解分配给它的子问题的局部最优解。
然后,节点之间通过通信和协作来更新各自的解,并逐步接近全局最优解。
一般来说,分布式凸优化算法可以分为同步和异步两种方式。
同步算法要求节点在每一轮迭代之后进行同步,并在同步时更新本地解。
异步算法不要求节点同步,允许节点按需更新解。
根据具体的应用场景和需求,选择合适的算法模式。
以下介绍两种常见的分布式凸优化算法。
1. 分布式次梯度算法(Distributed Subgradient Algorithm)分布式次梯度算法是一种同步算法,在每一轮迭代时,所有的节点都需要进行计算和通信。
算法的步骤如下:-初始化:每个节点随机生成一个初始解。
-计算梯度:每个节点计算其局部子问题的梯度。
-求解次梯度:节点之间进行通信,将各自的梯度进行求和,并求解全局问题的次梯度。
-更新解:每个节点使用次梯度更新自己的解。
-判断停止条件:如果满足停止条件,则算法结束;否则,返回第二步。
2. 分布式次梯度推导算法(Distributed Subgradient Projection Algorithm)分布式次梯度推导算法是一种异步算法,节点之间不要求同步,并允许节点按需更新解。
算法的步骤如下:-初始化:每个节点随机生成一个初始解。
-计算次梯度:每个节点计算其局部子问题的次梯度。
-更新解:节点之间进行通信,获取其他节点的解,并按照一定的规则更新自己的解。
-判断停止条件:如果满足停止条件,则算法结束;否则,返回第二步。
凸优化可行域法
(最新版)
目录
1.凸优化的定义和基本概念
2.凸优化的方法和分类
3.可行域法的原理和应用
4.可行域法的优点和局限性
5.结论
正文
1.凸优化的定义和基本概念
凸优化是数学优化中的一个分支,主要研究如何在凸函数集上寻找最优点或最优解。
凸函数是指满足以下性质的函数:对于函数上的任意两点,函数值总是介于这两点的函数值之间。
凸优化问题的解集是凸的,这意味着从任何解出发,沿着可行解空间的边界,总能找到另一个解。
2.凸优化的方法和分类
凸优化的方法有很多,常见的有线性规划、二次规划、梯度下降等。
根据优化问题的性质,凸优化可以分为无约束优化和有约束优化。
无约束优化是指在全空间中寻找最优点;有约束优化是在满足一定约束条件下寻找最优点。
3.可行域法的原理和应用
可行域法是一种求解有约束凸优化问题的方法,主要通过绘制可行域,即所有满足约束条件的解的集合,然后在可行域内寻找最优点。
具体步骤如下:
(1)根据约束条件绘制可行域;
(2)判断可行域是否为空,如果为空,则无解;
(3)在可行域内找到目标函数的最优点。
可行域法在实际应用中具有广泛的应用,如经济学、工程领域等。
4.可行域法的优点和局限性
可行域法的优点:
(1)直观,易于理解;
(2)求解过程简单,计算量相对较小;
(3)适用于各种有约束的凸优化问题。
局限性:
(1)对于复杂问题,绘制可行域较为困难;
(2)当目标函数不是凸函数时,无法使用可行域法求解。
5.结论
凸优化是一种重要的数学优化方法,可行域法是求解有约束凸优化问题的有效手段。
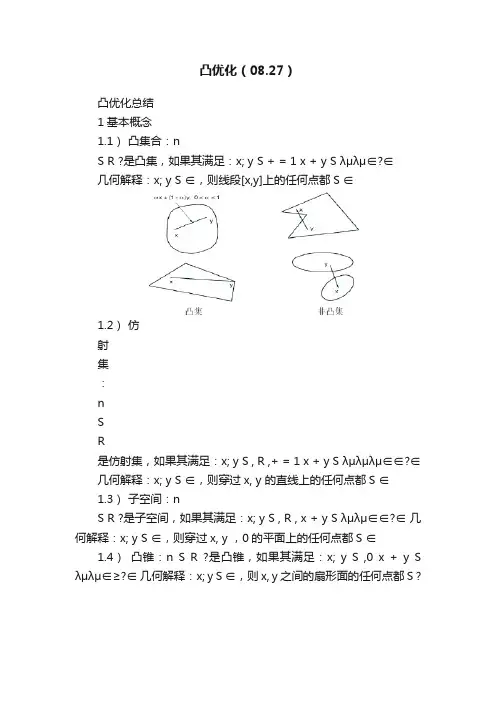
凸优化(08.27)凸优化总结1基本概念1.1)凸集合:nS R ?是凸集,如果其满足:x; y S + = 1 x + y S λμλμ∈?∈几何解释:x; y S ∈,则线段[x,y]上的任何点都S ∈1.2)仿射集:nSR是仿射集,如果其满足:x; y S , R ,+ = 1 x + y S λμλμλμ∈∈?∈几何解释:x; y S ∈,则穿过x, y 的直线上的任何点都S ∈1.3)子空间:nS R ?是子空间,如果其满足:x; y S , R , x + y S λμλμ∈∈?∈ 几何解释:x; y S ∈,则穿过x, y ,0的平面上的任何点都S ∈1.4)凸锥:n S R ?是凸锥,如果其满足:x; y S ,0 x + y S λμλμ∈≥?∈ 几何解释:x; y S ∈,则x, y 之间的扇形面的任何点都S ?集合C 是凸锥的充分必要条件是集合C 中的元素的非负线性组合仍在C 中,作为一般化结果,其中非负线性组合的数目可以推广到无穷1.5)超平面:满足{}Tx a x = b (a 0)≠的仿射集,如果b=0则变为子空间1.6)半空间:满足{}Tx a x b (a 0)≤≠的凸集,如果b=0则变为凸锥1.7)椭球体:{}T -1c c =x (x-x )A (x-x ) 1 ξ≤T n c A = A 0; x R ∈ 球心 1.8)范数:f :R n —R 是一种范数,如果对所有的nx; y R , t R ∈∈满足1. f(x) 0; f(x) = 0 x = 02. f(tx) = tf(x)3. f(x + y) f(x) + f(y)≥?≤范数分类● 1范数2x=● 2范数 1i xx x =∑● 3无穷范数 max i i xx ∞=1.9)有效域:集合(){()}dom f x X f x =∈<∞1.10)水平集:{()}{()}x X f x and x X f x αα∈<∈≤,其中α为一标量1.11)上镜图:函数:(,f x ∈-∞∞的上镜图由下面的集合给定{}()(,),,()epi f x w x X w R f x w =∈∈<给出的1n R +给出的子集。
分布式凸优化算法分布式凸优化算法是随着近年来数据规模急剧扩大和模型复杂性逐步增强,数据解释能力也日益提升的新兴优化方法。
一般来说,分布式凸优化算法是指将一个极大的凸优化问题以分布式的形式分解成多个凸优化的子问题,从而将问题分而治之,能够有效地解决大规模的传统凸优化算法无法求解的问题。
分布式凸优化算法具有高效率和较低求解成本等优点,在无约束最优化、约束最优化等领域有着广泛的应用,可以有效地求解各种复杂问题。
下面就分布式凸优化算法做一个简要介绍:1. 基本概念分布式凸优化算法是将传统的凸优化问题分解为多个子问题,并以分布式的形式将求解工作分散到运行单元的形式。
一般来说,分布式凸优化算法分为串行算法和并行算法两种,其中,串行算法是指在连续的运行单元中以串行的形式来进行计算的算法;而并行算法则指在多个独立运行单元中以并行的形式来进行计算的算法。
2. 主要思想分布式凸优化算法有三大原则:拆分、同步和投射,将传统凸优化算法从单机分布式化。
其中,拆分原则是将原始凸优化问题拆分成多个子问题,利用多个子问题进行求解;同步原则则是将拆分后的问题重新合并;投射原则是指将子问题的解投影到原优化问题,从而能够形成更精确的优化解。
3. 典型算法1)基于ADMM的分布式凸优化:Alternating Direction Method of Multipliers(ADMM)是基于对偶多元分解的一种最优化方法,该方法用于同时解决分解结构问题,在分布式计算中有着广泛的应用,在图优化算法中,ADMM也可以用于求解各种凸优化问题;2)基于PSGD的分布式凸优化:Parallel Stochastic Gradient Descent (PSGD)是一种基于随机梯度的分布式凸优化方法,其主要思想是多台机器分别进行梯度下降优化,再将各个机器上的结果进行同步更新;3)DC-ADMM:DC-ADMM是一种基于分布式梯度下降的分布式凸优化算法,该算法将传统的ADMM算法与分布式梯度下降算法进行融合,利用拆分原则、同步原则和投影原则,在多台机器上协作求解凸优化问题,并能够有效规避异步通信带来的影响;4)DC-RDA:DC-RDA是一种基于二次凸优化的分布式优化算法,该算法利用拆分原则、同步原则和投影原则,在多台机器并行运行,从而能够有效求解“NP”难问题,其主要思想是将原始二次优化问题拆分成多个子问题,利用内存独立的机器进行运算,随机梯度优化后投影到原始凸优化问题,从而达到最优解。
凸优化应用方法凸优化是数学领域中的一个重要概念,广泛应用于工程、金融、计算机科学等众多领域。
本文将介绍凸优化的应用方法以及其在不同领域中的具体应用。
一、凸优化的基本概念和性质在介绍凸优化的应用方法之前,先来了解一些凸优化的基本概念和性质。
凸优化问题的目标函数和约束条件满足以下两个条件:目标函数是凸函数,约束条件是凸集。
根据这个特性,凸优化问题可以通过凸优化算法高效地求解。
二、常用的凸优化算法1. 梯度下降法(Gradient Descent)梯度下降法是一种常用的优化算法,通过迭代的方式,不断调整模型参数以降低目标函数的值。
对于凸优化问题,梯度下降法能够以较快的速度逼近最优解。
2. 内点法(Interior Point Method)内点法是一种专门用于求解线性和非线性凸优化问题的方法。
相比于传统的最优化算法,内点法具有更快的收敛速度和更好的数值稳定性。
3. 对偶法(Duality Method)对偶法是一种将原始问题转化为对偶问题求解的方法。
对于凸优化问题,通过对偶法可以得到原始问题的解析解,从而简化求解过程。
三、凸优化在工程中的应用1. 信号处理在信号处理中,凸优化被广泛应用于信号重构、信号去噪等问题。
通过优化目标函数,可以将含噪声的信号恢复为原始信号,提高信号处理的准确性。
2. 电力系统在电力系统中,凸优化被用于最优潮流问题的求解。
通过优化电力系统中的功率分配和电压控制,可以使得系统的供电效率最大化,减少能源浪费。
3. 无线通信在无线通信领域,凸优化被应用于信号调制、功率分配等问题。
通过优化信号传输的方式和功率调整,可以提高无线通信的可靠性和效率。
四、凸优化在金融中的应用1. 证券组合优化在金融投资中,凸优化被广泛应用于证券组合的优化。
通过优化投资组合中的资产配置和权重分配,可以实现风险最小化和回报最大化的目标。
2. 风险管理在风险管理领域,凸优化被用于寻找最优的资产组合以降低投资风险。
通过优化投资组合的配置权重和风险控制,可以实现投资组合的风险最小化。

凸优化算法之⽜顿法原理对于求⽅程解问题,假设有函数f :R->R,我们希望找到满⾜f(θ)=0 的θ值. 这⾥θ是实数.⽜顿⽅法执⾏下⾯的更新求解过程如图所⽰简单的来说就是通过求当前点的导数得到下⼀个点.⽤到的性质是导数值等于该点切线和横轴夹⾓的正切值利⽤凸函数的性质,最值所在点 l'(θ)=0 令f(θ)=l'(θ)⽜顿⽅法的⼀般化:如果θ是⼀个向量,那么:海森矩阵(Hessian matrix),是⼀个n*n的矩阵,n是特征量的个数,并且H称为海森⽜顿⽅法的收敛速度⽐批处理梯度下降快很多,很少次的迭代就能够⾮常接近最⼩值了;但是当n很⼤时,每次迭代求海森矩阵和逆代价是很⼤的。
⽜顿法是⼆阶收敛,梯度下降法是⼀阶收敛的,所以⽜顿法看得更远,收敛更快。
⽜顿法的路径更符合最优路径。
对于⼆阶凸函数能够⼀步到达。
实际中常常先⽤梯度下降法,在离得⽐较近时使⽤⽜顿法;由于⽜顿法需要每次更新海森矩阵,所以使⽤拟⽜顿法。
举例求解问题 f(x1,x2) = -x14 - 2x24 + 2x1x2 + 2x2 + 6▽x1f =-4x13+2x2▽x2f = 2x1-8x23+2Hessian = [ -12x12, 2; 2, -24x22]迭代次数计数{[x1 ; x2 ] = [x1 ; x2 ] -Hessian 点乘 [▽x1f; ▽x2f ]}1. # -*- coding: utf-8 -*-2. """3. Created on Wed Apr 12 23:56:25 20174.5. @author: LoveDMR6.7. ⽜顿⽅法8. """9.10. import numpy as np11. import matplotlib.pyplot as plt12. delta =0.2513. x1 = np.arange(-10,10, delta )14. x2 = np.arange(-10,10, delta )15. X1 , X2 = np.meshgrid( x1 , x2 )16.17. Y =2*X1*X2+2*X2-X1**4-2*X2**4+618. plt.figure()19. bg_fig = plt.contour(X1,X2,Y)20.21. theta = np.array([8,8])22. a , b =[],[]23.24. a.append(theta[0])25. b.append(theta[1])26.27. H = np.array([[2,3],[3,10]])28. Hi= np.linalg.inv(H)29. for i in xrange(1,50):30. t = np.array([theta[0]**3*(-4)+2*theta[1]**2,(-8)*theta[1]**3+2*theta[0]+2])31. H = np.array([[(-12)*theta[0]**3,2],[2,(-24)*theta[1]**2]])32. Hi= np.linalg.inv(H)33. theta = theta - np.dot(Hi,t )34. a.append(theta[0])35. b.append(theta[1])36.37. plt.plot(a , b)38. plt.title("Newton's method")39. plt.xlabel('x1')40. plt.ylabel('x2')41. plt.show()。
凸优化参考答案凸优化参考答案凸优化是一种重要的数学领域,它在各个学科中都有广泛的应用。
从机器学习到金融风险管理,凸优化都发挥着重要的作用。
在本文中,我们将探讨凸优化的基本概念和一些常见的凸优化问题。
首先,我们来了解一下什么是凸优化。
凸优化是指在给定的约束条件下,寻找一个凸函数的全局最小值的问题。
凸函数具有一个特殊的性质,即对于任意两个点,连接这两个点的线段上的函数值都小于等于函数在这两个点上的函数值之间的线段上的函数值。
这个性质使得凸函数的最小值可以通过简单的方法找到。
凸优化问题可以分为线性凸优化和非线性凸优化两类。
线性凸优化是指目标函数和约束函数都是线性的情况。
这类问题可以通过线性规划算法求解。
非线性凸优化是指目标函数或约束函数中至少有一个是非线性的情况。
这类问题的求解相对困难一些,需要使用非线性规划算法。
在凸优化中,有一些常见的问题类型。
最小化问题是最简单的一种类型,即寻找一个函数的最小值。
约束最小化问题是在给定一些约束条件下寻找一个函数的最小值。
最大化问题是寻找一个函数的最大值。
约束最大化问题是在给定一些约束条件下寻找一个函数的最大值。
凸优化问题还有一些特殊的形式,比如二次规划问题、半定规划问题和凸二次规划问题。
二次规划问题是指目标函数和约束函数都是二次函数的情况。
半定规划问题是指目标函数是二次函数,约束函数是半定矩阵不等式的情况。
凸二次规划问题是指目标函数是二次函数,约束函数是线性函数和凸函数的情况。
凸优化问题的求解方法有很多种。
其中一种常用的方法是梯度下降法。
梯度下降法是一种迭代的优化算法,通过不断沿着目标函数的负梯度方向更新变量的值,最终达到目标函数的最小值。
另一种常用的方法是拉格朗日乘子法。
拉格朗日乘子法是一种通过引入拉格朗日乘子将约束条件转化为目标函数的方法,从而将原始问题转化为无约束优化问题。
除了梯度下降法和拉格朗日乘子法,还有一些其他的凸优化算法。
比如,内点法是一种通过在可行域内搜索的方法来求解凸优化问题的算法。
凸优化求解方法
凸优化求解方法
凸优化求解方法是一种利用数学分析工具和算法来解决凸优化
问题(convex optimization problem)的方法。
凸优化问题定义为在一定的条件下,使得目标函数达到最优值。
凸优化求解方法常被用在各种工程科学和机械工程中,尤其是优化设计中。
凸优化求解方法主要包括以下几种:
1、最小二乘法(Least Squares Method):最小二乘法是一种常用的凸优化求解方法,它利用最小二乘拟合的方法,通过最小二乘法的优化,可以得到最优的参数估计值,从而达到最优的目标值。
2、梯度下降法(Gradient Descent):梯度下降法是一种迭代的凸优化求解方法,通过不断地迭代,将目标函数沿着梯度方向移动,朝着最优解进行搜索,最终得到最优解。
3、随机投影法(Random Projection):随机投影法是一种快速凸优化求解方法,它通过对目标函数进行随机投影,从而朝着最优解进行搜索,最终得到最优解。
4、牛顿迭代法(Newton's Method):牛顿迭代法是一种基于数值分析的凸优化求解方法,通过不断迭代,从而逼近最优解,最终得到最优解。
5、拉格朗日-阿尔法法(Lagrange-Algorithm):拉格朗日-阿尔法法是一种基于算法设计,使用多种算法进行凸优化的求解方法。
完全凸函数和凸优化问题的求解方法对于凸优化问题,全局最优解一定存在且唯一,而对于完全凸函数,不仅有全局最优解存在且唯一的性质,更有着许多种优良特征,给凸优化问题的求解方法带来了许多便利。
一、完全凸函数的概念和性质完全凸函数是指连续、实值、下半连续、下半升的凸函数。
其中下半连续的定义为:$f(x^−)\leq f(x)$ 对所有$x$成立;下半升即为$f(x)−f(y)\geq μ(x−y)$ 对任意$x,y$和给定的常数$μ>0$成立。
完全凸函数有以下性质:(1)凸函数是完全凸函数。
(2)全局最优解存在唯一。
(3)下半连续和下半升保证了函数最小值的存在性和唯一性,也保证了最优值的稳定性和可解性。
(4)完全凸函数的次梯度集合是凸的,次梯度在最小值处等于$\partial f(x)$。
(5)完全凸函数的次梯度集合在闭包中是紧致的。
二、完全凸函数的求解方法在求解完全凸函数时,可以采用次梯度法、半随机梯度法和随机梯度法等相关的求解方法。
(1)次梯度法次梯度法是一种求解不可导凸优化问题的经典方法。
该方法是一种迭代算法,每次迭代都给出目标函数的下界,直到下界收敛到最小值,或者计算次数达到预设值或时间限制。
该算法的迭代公式如下:$\begin{cases}\text{Choose an initial point }x_0\text{ andlet }t=0\\ f_t(x)=f(x_t)+g^T(x−x_t)\text{(次梯度定义)}\\x_{t+1}=x_t−t(g_t+\gamma h_t)\end{cases}$其中$t$为迭代次数,$g^T(x−x_t)\in\partial f(x_t)$是$f_i(x_t)$在某个子梯度的下半微分。
(2)半随机梯度法半随机梯度法可以解决球机器学习领域中的大规模凸优化问题。
该方法结合了批量(Batch)梯度法和随机梯度法的优点,即在每一步中,使用小批量数据来更新参数,从而减少了计算复杂度,同时保证了精度。
轨迹优化序列凸优化算法一、引言随着科技的不断发展,轨迹优化成为了一种重要的优化方法,广泛应用于路径规划、机器人控制和物流优化等领域。
轨迹优化的目标是在给定的约束条件下,寻找一条最优的轨迹,使得某种指标达到最大或最小值。
而序列凸优化算法是一种常用的优化方法,能够高效地解决轨迹优化问题。
1. 轨迹优化轨迹优化是指在给定约束条件下,寻找一条最优的轨迹,使得某种指标达到最大或最小值。
轨迹可以是一系列连续的点或离散的路径,根据具体应用场景的不同而定。
2. 序列凸优化算法序列凸优化算法是一种迭代算法,通过不断优化目标函数,最终得到最优解。
该算法的核心思想是将原始问题转化为一系列凸优化子问题,并通过迭代求解这些子问题来逼近最优解。
三、轨迹优化序列凸优化算法的原理1. 目标函数的建立轨迹优化问题通常可以通过建立目标函数来描述。
目标函数可以是关于轨迹的某种指标,如路径长度、时间消耗或者某种效用函数等。
根据具体应用场景的不同,可以灵活选择目标函数。
2. 约束条件的定义为了使优化结果符合实际约束,需要定义一系列约束条件。
约束条件可以是关于轨迹的物理限制,如避免碰撞、保持稳定等,也可以是关于环境的限制,如规避障碍物、遵守交通规则等。
3. 子问题的求解将轨迹优化问题转化为一系列凸优化子问题,并采用序列凸优化算法逐步求解。
每次迭代中,通过优化当前子问题的目标函数和约束条件,得到一组可能的解,并更新当前轨迹。
不断迭代直到满足终止条件为止。
四、轨迹优化序列凸优化算法的应用场景1. 路径规划在自动驾驶、无人机导航等领域,轨迹优化序列凸优化算法可以用于寻找最优路径,考虑到交通流量、道路限制等因素,从而实现高效安全的路径规划。
2. 机器人控制在机器人运动控制中,通过轨迹优化序列凸优化算法可以优化机器人的运动轨迹,使其在给定约束条件下实现最优的运动效果,提高机器人的运动速度和精度。
3. 物流优化在物流领域,通过轨迹优化序列凸优化算法可以优化货物的运输路径,考虑到运输成本、时间效率和货物安全等因素,从而实现物流过程的最优化。
凸优化算法原理及讲解
嘿,朋友们!今天咱来聊聊凸优化算法原理呀!这玩意儿就像是一把神奇的钥匙,能打开好多难题的大门呢!
你看啊,凸优化算法就好像是一个聪明的导航员。
咱平时出门找路,要是没有个靠谱的导航,那不得晕头转向呀!凸优化算法也是这样,它能在复杂的数据海洋里给咱指明方向。
想象一下,那些数据就像是一群调皮的小孩子,到处乱跑。
而凸优化算法呢,就能把这些小孩子都管得服服帖帖的,让它们按照一定的规则排好队,找到最优的解决方案。
它是怎么做到的呢?这就涉及到一些专业的知识啦!比如说,它会利用一些特殊的性质和规则,来判断哪个方向是最好的。
这就好像咱走路,肯定是挑平坦好走的路走呀,总不能专挑那些坑坑洼洼的吧!
凸优化算法还特别厉害的一点是,它能处理各种各样的问题。
不管是让工厂怎么安排生产最省钱,还是让物流怎么运输最快捷,它都能搞定!这多牛呀!
而且哦,凸优化算法可不是一成不变的。
它就像一个爱学习的好学生,会不断地改进自己,让自己变得更厉害。
随着科技的发展,它也在不断地进化呢!
咱生活中的很多地方都有它的影子。
比如说,咱手机上的那些智能应用,说不定就用到了凸优化算法呢!它在背后默默地工作,让咱的生活变得更方便、更高效。
说真的,凸优化算法真的是个宝呀!咱可得好好了解了解它,说不定哪天就能派上大用场呢!你说是不是?它就像一个隐藏的高手,不声不响地为我们解决着各种难题。
所以呀,别小看了这个凸优化算法哦!它虽然听起来有点高深莫测,但其实真的很有趣,也很有用呢!让我们一起好好探索它的奥秘吧!。
凸优化处理方法凸优化是数学中的一种重要方法,广泛应用于工程、经济学、运筹学等领域。
凸优化处理方法是指在解决凸优化问题时所采用的一系列算法和技巧。
本文将介绍几种常用的凸优化处理方法,并分析其特点和适用范围。
一、梯度下降法梯度下降法是一种常用的凸优化处理方法,通过迭代的方式逐步优化目标函数。
其基本思想是沿着目标函数的负梯度方向进行搜索,不断更新参数,直到达到最优解。
梯度下降法具有收敛性好、计算简单等优点,适用于解决大规模的凸优化问题。
二、牛顿法牛顿法是一种基于二阶导数信息的凸优化处理方法。
其核心思想是利用目标函数的二阶导数矩阵信息进行迭代优化,通过求解线性方程组来更新参数。
牛顿法收敛速度较快,适用于解决高维、非线性的凸优化问题。
三、内点法内点法是一种近年来发展起来的凸优化处理方法,通过引入人工内点,将原凸优化问题转化为一系列的线性规划问题。
内点法具有全局收敛性和多项式时间复杂度等优点,适用于解决大规模的凸优化问题。
四、分裂算法分裂算法是一种将原凸优化问题分解为多个子问题进行求解的凸优化处理方法。
其基本思想是将原问题分解为几个较小的子问题,并通过迭代的方式逐步优化子问题,最终得到原问题的解。
分裂算法适用于解决具有一定结构的凸优化问题,能够提高算法的效率和收敛速度。
五、次梯度法次梯度法是一种求解非光滑凸优化问题的处理方法。
在非光滑凸优化问题中,目标函数可能不是处处可微的,此时无法使用传统的梯度下降法等方法。
次梯度法通过引入次梯度的概念,对非光滑点进行处理,从而求解非光滑凸优化问题。
六、对偶法对偶法是一种将原凸优化问题转化为对偶问题进行求解的凸优化处理方法。
通过构造拉格朗日函数和对偶函数,将原问题转化为对偶问题,并通过求解对偶问题来获取原问题的解。
对偶法能够有效地求解具有特殊结构的凸优化问题,提高算法的效率和精度。
七、凸松弛法凸松弛法是一种将原非凸优化问题转化为凸优化问题进行求解的处理方法。
通过对原问题进行适当的松弛,将其转化为一个凸优化问题,并利用凸优化方法来求解。