高等数学欧拉方程
- 格式:ppt
- 大小:560.00 KB
- 文档页数:9
编辑词条欧拉公式[编辑本段]欧拉公式(Euler公式)在数学历史上有很多公式都是欧拉(Leonhard Euler 公元1707-1783年)发现的,它们都叫做欧拉公式,它们分散在各个数学分支之中。
(1)分式里的欧拉公式:a^r/(a-b)(a-c)+b^r/(b-c)(b-a)+c^r/(c-a)(c-b)当r=0,1时式子的值为0当r=2时值为1当r=3时值为a+b+c(2)复变函数论里的欧拉公式:e^ix=cosx+isinx,e是自然对数的底,i是虚数单位。
它将三角函数的定义域扩大到复数,建立了三角函数和指数函数的关系,它在复变函数论里占有非常重要的地位。
将公式里的x换成-x,得到:e^-ix=cosx-isinx,然后采用两式相加减的方法得到:sinx=(e^ix-e^-ix)/(2i),cosx=(e^ix+e^-ix)/2.这两个也叫做欧拉公式。
将e^ix=cosx+isinx中的x取作∏就得到:e^i∏+1=0.这个恒等式也叫做欧拉公式,它是数学里最令人着迷的一个公式,它将数学里最重要的几个数学联系到了一起:两个超越数:自然对数的底e,圆周率∏,两个单位:虚数单位i和自然数的单位1,以及数学里常见的0。
数学家们评价它是“上帝创造的公式”,我们只能看它而不能理解它。
(3)三角形中的欧拉公式:设R为三角形外接圆半径,r为内切圆半径,d为外心到内心的距离,则:d^2=R^2-2Rr(4)拓扑学里的欧拉公式:V+F-E=X(P),V是多面体P的顶点个数,F是多面体P的面数,E是多面体P 的棱的条数,X(P)是多面体P的欧拉示性数。
如果P可以同胚于一个球面(可以通俗地理解为能吹胀而绷在一个球面上),那么X(P)=2,如果P同胚于一个接有h个环柄的球面,那么X(P)=2-2h。
X(P)叫做P的欧拉示性数,是拓扑不变量,就是无论再怎么经过拓扑变形也不会改变的量,是拓扑学研究的范围。
(5)初等数论里的欧拉公式:欧拉φ函数:φ(n)是所有小于n的正整数里,和n互素的整数的个数。
欧拉方程推导全过程嘿,数学爱好者们!今天我要带大家走进一个超级有趣的数学世界,那就是欧拉方程的推导。
这可不像在公园散步那么简单,但也绝不是无法攀登的高山,只要跟着我一步一步来,保准你能搞明白。
咱先来说说什么是欧拉方程。
想象一下,在数学这个大王国里,有一个神秘的方程式,就像一颗璀璨的明珠,它把指数函数、三角函数这些看似不太相关的家伙巧妙地联系在了一起。
这就是欧拉方程,$e^{ix} = \cos x + i\sin x$,其中$e$是自然常数,$i$是虚数单位,$x$是一个实数。
这个方程就像一把魔法钥匙,能打开很多数学难题的大门呢。
那咱们怎么推导这个神奇的方程呢?咱们得从泰勒级数这个有力的工具开始。
泰勒级数就像是一个超级放大镜,可以把一个函数展开成无穷项的多项式。
对于指数函数$e^x$,它的泰勒级数展开式是:$e^x = 1 + x + \frac{x^2}{2!}+ \frac{x^3}{3!}+ \frac{x^4}{4!}+ \cdots$。
这个式子看起来有点吓人,但是别怕,咱们一点点分析。
这里的$n!$就是$n$的阶乘,也就是从$1$乘到$n$。
再来看三角函数$\cos x$和$\sin x$的泰勒级数展开式。
$\cos x = 1 - \frac{x^2}{2!}+ \frac{x^4}{4!}- \frac{x^6}{6!}+ \cdots$,$\sin x = x - \frac{x^3}{3!}+ \frac{x^5}{5!}- \frac{x^7}{7!}+ \cdots$。
现在咱们把$x$换成$ix$代入到$e^x$的泰勒级数展开式中。
$e^{ix} = 1 + ix + \frac{(ix)^2}{2!}+ \frac{(ix)^3}{3!}+ \frac{(ix)^4}{4!}+ \cdots$。
那这个式子要怎么化简呢?咱们来仔细瞧瞧。
$(ix)^2 = -x^2$,$(ix)^3 = -ix^3$,$(ix)^4 = x^4$等等。
欧拉方程是一种描述流体力学中流体运动的基本方程,它是根据质量守恒和动量守恒原理导出的。
以下是欧拉方程的基本原理:
质量守恒原理:质量守恒原理是指在流体运动过程中,质量不会凭空消失或增加。
根据质量守恒原理,欧拉方程中的质量守恒项表示为流体密度和流速的乘积。
动量守恒原理:动量守恒原理是指在流体运动过程中,流体粒子的动量总量保持不变。
根据动量守恒原理,欧拉方程中的动量守恒项表示为流体的动量和流体受力的乘积。
基于这两个原理,欧拉方程可以表示为以下形式:
∂ρ/∂t + ∇·(ρv) = 0
∂(ρv)/∂t + ∇·(ρv⊗v) = -∇p + ∇·τ+ ρg
其中,ρ是流体密度,t是时间,v是流体速度矢量,p是压力,τ是应力张量,g是重力加速度,∇表示梯度运算符,⊗表示向量的张量积。
欧拉方程描述了流体在空间和时间上的变化,其中第一项表示质量守恒,第二项表示动量守恒。
欧拉方程是研究流体力学中流体运动行为的重要工具,通过求解欧拉方程,可以得到流体的速度、压力和流动特性等相关信息。
欧拉公式解析欧拉公式,那可是数学世界里超级厉害的一个存在!咱们先来说说欧拉公式是啥。
欧拉公式是e^(iθ) = cosθ + i*sinθ 。
这看起来是不是有点复杂?别担心,咱们慢慢捋一捋。
就拿咱们生活中的一个例子来说吧,比如说你在公园里转圈圈。
想象一下,你站在圆心,每转一个角度,就相当于在这个数学的“圆”里移动了一段“距离”。
这个“距离”可以用欧拉公式来描述。
咱们先看看 e 这个数,它可是个神奇的常数,在很多数学和科学的地方都出现。
就像你总是能在熟悉的地方碰到熟悉的朋友一样,e 也是数学世界里的“常客”。
再说说 i ,这个虚数单位,一开始接触的时候,可能会觉得它有点奇怪。
但其实啊,它就像是给数学打开了一扇新的窗户,让我们能看到更多奇妙的景象。
而θ 呢,就是咱们转的那个角度。
cosθ 和sinθ 大家应该比较熟悉啦,它们能告诉我们在某个角度上,水平和垂直方向的“分量”是多少。
比如说,当θ = 0 的时候,欧拉公式就变成了 e^(i*0) = cos0 + i*sin0 ,也就是 1 = 1 + 0i ,这是不是很简单明了?再比如,当θ = π/2 的时候,就变成了 e^(i*π/2) = cos(π/2) +i*sin(π/2) ,也就是 i = 0 + i ,是不是很有趣?那欧拉公式到底有啥用呢?这用处可大了去了!在物理学里,研究交流电的时候,欧拉公式就能大显身手。
还有在信号处理、控制理论等好多领域,欧拉公式都是非常重要的工具。
记得有一次,我和一个朋友讨论一个物理问题,涉及到电磁波的传播。
我们一开始被那些复杂的公式和计算搞得晕头转向。
后来突然想到了欧拉公式,就像在黑暗中找到了一盏明灯。
用欧拉公式一化简,那些原本让人头疼的式子一下子变得清晰起来,问题也迎刃而解。
那一刻,我真真切切地感受到了欧拉公式的强大魅力。
总之,欧拉公式虽然看起来有点复杂,但只要我们耐心去理解,去探索,就能发现它背后隐藏的美妙和神奇。
![欧拉方程_高等数学(上册)_[共2页]](https://uimg.taocdn.com/6abcc8c64431b90d6d85c77b.webp)
欧拉方程的基本原理欧拉方程是一种微分方程,由瑞士数学家欧拉提出。
它是描述物理现象中最常见的方程之一,并在工程、自然科学以及经济学等领域中得到广泛应用。
欧拉方程具有一些特殊的性质,使得它成为求解一些重要问题的有力工具。
在本文中,我将详细介绍欧拉方程的基本原理。
欧拉方程是以欧拉(Euler)命名的,他是18世纪最杰出的数学家之一、欧拉曾经系统地研究了二阶常系数线性微分方程,并提出并解决了一类特殊的微分方程,还研究了更高阶的欧拉方程(即阶数高于二的微分方程)。
\(a_n(x)y^n+a_{n-1}(x)y^{n-1}+⋯+a_1(x)y'+a_0(x)y=g(x)\)其中,\(a_n(x),a_{n-1}(x),…,a_1(x),a_0(x)\)是已知的连续函数,称为方程的系数函数;\(y\)是未知函数,代表方程的解;\(g(x)\)是已知的连续函数,称为非齐次项。
基本原理:1.齐次方程齐次方程是指当非齐次项\(g(x)\)为零时的方程,即该时刻纯粹由齐次项的线性组合构成:\(a_n(x)y^n+a_{n-1}(x)y^{n-1}+⋯+a_1(x)y'+a_0(x)y=0\)为了求解齐次方程,我们需要找到一个形如\(y=e^{rx}\)的解。
将这个解代入方程,并化简,我们可以得到一个对\(r\)的代数方程。
该代数方程的根决定了齐次方程的解的形式。
根的个数通常等于方程的阶数。
2.非齐次方程非齐次方程是指当非齐次项\(g(x)\)不为零时的方程,即方程的左边与右边都有贡献。
为了求解非齐次方程,我们需要首先找到一个特解,使得方程的左边等于右边。
这个特解可以通过猜测和尝试的方法求解。
特解的形式通常与非齐次项的形式有关。
如果非齐次项是一个多项式函数,我们可以猜测一个多项式解;如果是三角函数或指数函数,我们可以猜测一个相应的解。
特解的形式可以根据经验和观察来确定。
将这个特解代入方程后进行化简,我们可以得到适当的常数值。
利用欧拉公式求解欧拉公式是数学中的一种重要公式,用来描述复数的指数函数。
它由著名的瑞士数学家莱昂哈德·欧拉于18世纪提出并证明。
欧拉公式的表达式为 e^ix = cos(x) + isin(x),其中e是常数, i是虚数单位,x是实数。
这个等式将复数写成了指数的形式,从而方便进行复数运算。
欧拉公式在数学、物理学、工程学等多个领域都有广泛的应用。
它在复数分析、微积分、信号处理等方面都有重要作用。
接下来将详细介绍欧拉公式的解释和运用。
首先,我们来看一下欧拉公式的证明。
通过泰勒级数展开可以证明欧拉公式成立。
泰勒级数展开是将一些函数表示为无限次可微函数的幂级数的形式。
以指数函数e^x为例,它的泰勒级数展开为1 + x + x^2/2! + x^3/3! + ...。
将x替换为ix,即可得到e^ix的泰勒级数展开。
然后根据奇偶性质和复数的定义,我们可以将e^ix展开为cos(x) + isin(x),从而证明欧拉公式成立。
欧拉公式提供了一种将复数表达为指数形式的方法。
这种表达方式在复数计算中十分方便,特别是在求幂、对数、三角函数等运算时,可以直接利用欧拉公式进行化简和计算。
例如,要计算e^zi,其中z是复数,我们可以将z表示为z = x + iy的形式,然后将e^zi转化为e^x *e^iy,再分别对e^x和e^iy进行计算。
这样就大大简化了复数计算的过程。
欧拉公式还可以用来解决一些复杂的问题。
例如,它在微积分中可以用来求解常微分方程的初值问题。
对于一些具有指数函数解的微分方程,可以利用欧拉公式将其转化为求解常微分方程的初值问题。
这种方法十分实用,可以大大简化微分方程的求解过程。
在物理学和工程学中,欧拉公式也有广泛的应用。
例如,在信号处理中,复数幅角的变化可以用欧拉公式来描述。
在电路分析中,欧拉公式可以用来分析交流电路。
在量子力学中,欧拉公式是描述波函数的数学工具。
总结来说,欧拉公式是数学中的一种重要公式,用来描述复数的指数函数。
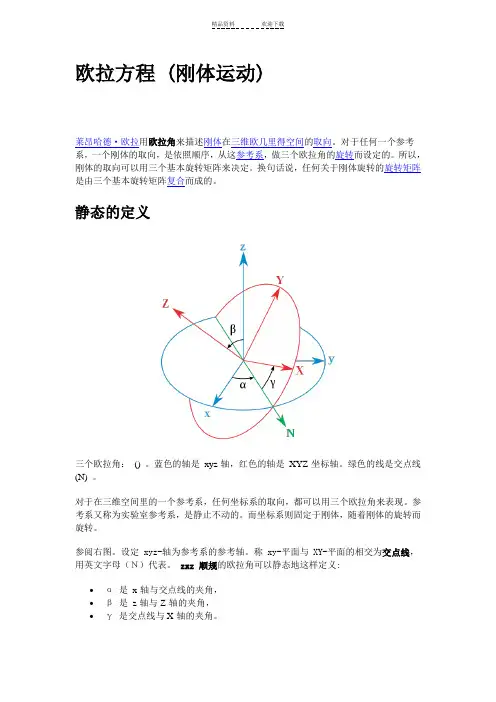
欧拉方程 (刚体运动)莱昂哈德·欧拉用欧拉角来描述刚体在三维欧几里得空间的取向。
对于任何一个参考系,一个刚体的取向,是依照顺序,从这参考系,做三个欧拉角的旋转而设定的。
所以,刚体的取向可以用三个基本旋转矩阵来决定。
换句话说,任何关于刚体旋转的旋转矩阵是由三个基本旋转矩阵复合而成的。
静态的定义三个欧拉角:() 。
蓝色的轴是xyz-轴,红色的轴是XYZ-坐标轴。
绿色的线是交点线(N) 。
对于在三维空间里的一个参考系,任何坐标系的取向,都可以用三个欧拉角来表现。
参考系又称为实验室参考系,是静止不动的。
而坐标系则固定于刚体,随着刚体的旋转而旋转。
参阅右图。
设定 xyz-轴为参考系的参考轴。
称 xy-平面与 XY-平面的相交为交点线,用英文字母(N)代表。
zxz 顺规的欧拉角可以静态地这样定义:∙α是x-轴与交点线的夹角,∙β是z-轴与Z-轴的夹角,∙γ是交点线与X-轴的夹角。
很可惜地,对于夹角的顺序和标记,夹角的两个轴的指定,并没有任何常规。
科学家对此从未达成共识。
每当用到欧拉角时,我们必须明确的表示出夹角的顺序,指定其参考轴。
实际上,有许多方法可以设定两个坐标系的相对取向。
欧拉角方法只是其中的一种。
此外,不同的作者会用不同组合的欧拉角来描述,或用不同的名字表示同样的欧拉角。
因此,使用欧拉角前,必须先做好明确的定义。
[编辑]角值范围∙值从0 至2π弧度。
∙β值从0 至π弧度。
对应于每一个取向,设定的一组欧拉角都是独特唯一的;除了某些例外:∙两组欧拉角的α,一个是0 ,一个是2π,而β与γ分别相等,则此两组欧拉角都描述同样的取向。
∙两组欧拉角的γ,一个是0 ,一个是2π,而α与β分别相等,则此两组欧拉角都描述同样的取向。
[编辑]旋转矩阵前面提到,设定刚体取向的旋转矩阵是由三个基本旋转矩阵合成的:单独分开作用,每个矩阵各自代表绕着其转动轴的旋转;但是,当它们照次序相乘,∙最里面的(最右的) 矩阵代表绕着z 轴的旋转。
第九节 欧拉方程变系数的线性微分方程,一般说来都是不容易求解的. 但是有些特殊的变系数线性微分方程,则可以通过变量替换化为常系数的线性微分方程,因而容易求出其解,欧拉方程就是其中的一种.分布图示★ 欧拉方程★ 例1★例2 ★ 例3 ★ 内容小结★ 课堂练习 ★ 习题12—9 ★ 返回内容要点形如)(1)1(11)(x f y p y x p y x p y x n n n n n n =+'+++---Λ (9.1)的方程称为欧拉方程, 其中n p p p ,,,21Λ为常数.欧拉方程的特点是: 方程中各项未知函数导数的阶数与其乘积因子自变量的幂次相同. 作变量替换 t e x = 或 ,ln x t =将上述变换代入欧拉方程, 则将方程(9.1)化为以t 为自变量的常系数线性微分方程, 求出该方程的解后, 把t 换为ln x , 即得到原方程的解.如果采用记号D 表示对自变量t 求导的运算,dtd 则上述结果可以写为 ,Dy y x =' y D D y x )1(2-='',y D D D y D D D y x )2)(1()23(233--=+-=''', 一般地,有y k D D D y x k k )1()1()(+--=Λ. (9.2)例题选讲例1(E01)求欧拉方程xx y x y x 1ln 62-='+''的通解. 解 作变量替换t e x =或,ln x t =则题设方程化为,6)1(te t Dy y D D --=+-即.622t e t dt y d --= 两次积分,可求得其通解为y .321t e t t C C --++=代回原来变量,得原方程的通解y .1)(ln ln 321xx x C C -++=例2(E02)求欧拉方程22334x y x y x y x ='-''+'''的通解.解 作变量变换t e x =或,ln x t =原方程化为,34)1()2)(1(2t e Dy y D D y D D D =--+--即te Dy y D y D 223332=-- 或.33222233t e dt dy dt y d dt y d =-- (1) 方程(1)所对应的齐次方程的特征方程 ,03223=--r r r求得特征根,01=r ,12-=r ,33=r 故所以齐次方程的通解Y t t e C e C C 3321++=-.3321x C x C C ++= 设特解*y t be 2=,2bx =代入原方程得,21-=b 即,2*2x y -=故所求欧拉方程的通解为 y .2123321x x C x C C -++=例3 设有方程,0)0(),0(),1ln(])1(2[)1(02='≥+-''++=+⎰y x x dx y x y y x x求由此方程所确定的函数).(x y解 将方程两边对x 求导,整理后得y y x y x +'+-''+)1()1(2,11x+=且有,0)0(=y ,0)0(='y 这是欧拉方程,令t e x =+1或),1ln(x t +=将它化为常系数非齐次线性微分方程,222t e y dt dy dty d -=+- 其通解为,41)(21t t e e t C C y -++=故原方程的通解为 ,)1(41)1)](1ln([21x x x C C y +++++= 由初始条件,0)0(=y ,0)0(='y 可求得,411-=C ,212=C 故由题设方程确定的函数为.)1(41)1()1ln(2141x x x y +++⎥⎦⎤⎢⎣⎡++-=课堂练习求下列欧拉方程的通解:1.x y y x y x 342='-''+''';2.x x y x y y 22=+'-''; 3.x y y x y x 342='-''+''';4.x y y x y x ln cos 22=+'+''.欧拉(Euler ,1707~1783)欧拉,瑞士数学家及自然科学家。
牛顿-欧拉方程欧拉方程(Euler equations),是欧拉运动定律的定量描述,欧拉运动定律是牛顿运动定律的延伸,在牛顿发表牛顿运动定律超过半个世纪后,于1750年,欧拉才成功的用欧拉方程表述了该定律:该方程是建立在角动量定理的基础上的描述刚体的旋转运动时刚体所受外力矩与角加速度的关系式,大多时候可简写成:其中,分别为刚体坐标系下三个轴的所受的外力矩,分别为刚体三个坐标轴的转动惯量(刚体坐标系下)。
欧拉方程通常与牛顿的平移运动方程被一起写出,称为牛顿-欧拉方程(Newton-Euler equations):这里对牛顿的平移运动方程不赘述,只对欧拉方程进行讨论。
1.单质点角动量定理质点旋转时,有动量定理:对两边叉乘质点位置矢量:观察:因为:故有:定义角动量,可以看出为外力矩故有单质点的角动量定理:2.刚体的角动量定理定义刚体的角动量为:其中:下标G表示该向量为大地坐标系下的,的下标i表示该向量为大地坐标下各个质量元的向量。
刚体旋转运动参考的惯性系是大地坐标系,不能把采用刚体的本身坐标系作为参考系,本身坐标系的提出只是方便我们某些量的分析与表述,如角速度、惯性张量。
(这里需要特别说明的是因为刚体质量分布不均匀的原因,角动量的方向往往不与刚体角速度方向一致,这也是无力矩进动的原因,即很多时候刚体角速度不守恒但刚体的角动量守恒了,宏观来看就是因为要保证角动量和动量守恒所以才要产生内力作用使角速度变化达到守恒的效果。
)由牛顿第三定律易知内力矩产生的角动量变化相抵,故有刚体的角动量定理:其中:为外力矩把上式展开有:其中: 称为惯性矩阵刚体旋转时,是变化的,但刚体在刚体坐标系下的惯性矩阵 不会变,且容易分析得到:其中: 为刚体坐标系下到大地坐标系的旋转矩阵。
3.欧拉方程的证明在先证欧拉方程前,先给出几个刚体坐标系下的向量:外力矩:;惯性矩阵: ;角速度:引入刚体坐标系的向量:旋转运动时:旋转矩阵,刚体角速度都为变量,只有 为不变量。
![[整理版]欧拉方程](https://uimg.taocdn.com/b4498afce109581b6bd97f19227916888486b974.webp)
泛函的欧拉方程(by zhengpin1390)0(二)、泛函的欧拉方程欧拉方程是泛函极值条件的微分表达式,求解泛函的欧拉方程,即可得到使泛函取极值的驻函数,将变分问题转化为微分问题。
(1)最简单的欧拉方程:设函数F(x,y,y') 是三个变量的连续函数,且点(x,y)位于有界闭区域B内,则对形如0的变分,若其满足以下条件:0c) 在有界闭区域B内存在某条特定曲线y。
(x) ,使泛函取极值,且此曲线具有二阶连续导数。
则函数y。
(x) 满足微分方程:上式即为泛函Q[y]的欧拉方程。
(2)含有自变函数高阶倒数的泛函的欧拉方程一般来说,对于下述泛函:在类似条件下,可以得到对应的欧拉方程为:(3)含有多个自变函数的泛函的欧拉方程对于下述泛函:其欧拉方程组为:(4)多元函数的泛函及其欧拉方程此处仅考虑二元函数的情况,对如下所示多元函数的泛函:其欧拉方程为:泛函分析0泛函分析是研究拓扑线性空间到拓扑线性空间之间满足各种拓扑和代数条件的映射的分支学科。
它是20世纪30年代形成的。
从变分法、微分方程、积分方程、函数论以及量子物理等的研究中发展起来的,它运用几何学、代数学的观点和方法研究分析学的课题,可看作无限维的分析学。
0泛函分析的产生0十九世纪以来,数学的发展进入了一个新的阶段。
这就是,由于对欧几里得第五公设的研究,引出了非欧几何这门新的学科;对于代数方程求解的一般思考,最后建立并发展了群论;对数学分析的研究又建立了集合论。
这些新的理论都为用统一的观点把古典分析的基本概念和方法一般化准备了条件。
0本世纪初,瑞典数学家弗列特荷姆和法国数学家阿达玛发表的著作中,出现了把分析学一般化的萌芽。
随后,希尔伯特和海令哲来创了“希尔伯特空间”的研究。
到了二十年代,在数学界已经逐渐形成了一般分析学,也就是泛函分析的基本概念。
0由于分析学中许多新部门的形成,揭示出分析、代数、集合的许多概念和方法常常存在相似的地方。
比如,代数方程求根和微分方程求解都可以应用逐次逼近法,并且解的存在和唯一性条件也极其相似。
欧拉公式的四种形式
形式一:e^ix = cos(x) + isin(x)
这是欧拉公式的最常见形式,也被称为欧拉公式的复数形式。
其中e 是自然常数,i是虚数单位,x是实数。
这个公式表达了一个极为重要的关系,即自然常数e的虚指数幂可以表示为一个复数,它的实部是
cos(x),虚部是sin(x)。
这表明了三角函数和指数函数之间的关系,扩展了指数函数的定义域到了虚数。
形式二:e^ix + 1 = 0
这是欧拉公式的另一种常见形式,也被称为欧拉方程。
将x取π,可以得到著名的欧拉方程e^iπ+1=0。
这个公式表达了e的π倍的虚指数幂加上1等于0,它被认为是数学中最美丽的公式之一,将五个最基本的数学常数(0、1、e、i和π)结合在一起。
形式三:cos(x) = (e^(ix) + e^(-ix)) / 2
形式四:sin(x) = (e^(ix) - e^(-ix)) / (2i)。
在数学历史上有很多公式都是欧拉(Leonhard Euler 公元1707-1783年)发现的,它们都叫做欧拉公式,它们分散在各个数学分支之中。
(1)分式里的欧拉公式:a^r/(a-b)(a-c)+b^r/(b-c)(b-a)+c^r/(c-a)(c-b)当r=0,1时式子的值为0当r=2时值为1当r=3时值为a+b+c(2)复变函数论里的欧拉公式:e^ix=cosx+isinx,e是自然对数的底,i是虚数单位。
它将三角函数的定义域扩大到复数,建立了三角函数和指数函数的关系,它在复变函数论里占有非常重要的地位。
将公式里的x换成-x,得到:e^-ix=cosx-isinx,然后采用两式相加减的方法得到:sinx=(e^ix-e^-ix)/(2i),cosx=(e^ix+e^-ix)/2.这两个也叫做欧拉公式。
将e^ix=cosx+isinx中的x取作∏就得到:e^i∏+1=0.这个恒等式也叫做欧拉公式,它是数学里最令人着迷的一个公式,它将数学里最重要的几个数学联系到了一起:两个超越数:自然对数的底e,圆周率∏,两个单位:虚数单位i和自然数的单位1,以及数学里常见的0。
数学家们评价它是“上帝创造的公式”,我们只能看它而不能理解它。
(3)三角形中的欧拉公式:设R为三角形外接圆半径,r为内切圆半径,d为外心到内心的距离,则:d^2=R^2-2Rr(4)拓扑学里的欧拉公式:V+F-E=X(P),V是多面体P的顶点个数,F是多面体P的面数,E是多面体P的棱的条数,X(P)是多面体P的欧拉示性数。
如果P可以同胚于一个球面(可以通俗地理解为能吹胀成一个球面),那么X(P)=2,如果P 同胚于一个接有h个环柄的球面,那么X(P)=2-2h。
X(P)叫做P的拓扑不变量,是拓扑学研究的范围。
(5)初等数论里的欧拉公式:欧拉φ函数:φ(n)是所有小于n的正整数里,和n互素的整数的个数。
n是一个正整数。
欧拉证明了下面这个式子:如果n的标准素因子分解式是p1^a1*p2^a2*……*pm*am,其中众pj(j=1,2,……,m)都是素数,而且两两不等。
欧拉方程证明欧拉方程是由莱昂哈德·欧拉于1736年提出的,它是一种特殊的数学方程式,描述了一个复杂的函数与自身导数之间的关系。
欧拉方程的形式为:f(x)+f'(x)=0,其中f'(x)表示f(x)的导数。
欧拉方程的证明过程并不复杂,可以通过将欧拉方程代入欧拉公式(e^{ix}=cos(x)+isin(x))中得到。
具体证明过程如下:首先,将欧拉方程代入欧拉公式中,得到:e^{ix}=cos(x)+isin(x)将这个式子对x求导,得到:ie^{ix}=-sin(x)+icos(x)然后,将上面这个式子乘以i,并将欧拉方程代入其中,得到: if(x)=-f'(x)将上面这个式子两边同时乘以e^{ix},得到:ie^{ix}f(x)=-ie^{ix}f'(x)左边的式子可以化简为:ie^{ix}f(x)=if(x)e^{ix}将这个式子两边同时积分,得到:∫ie^{ix}f(x)dx=∫if(x)e^{ix}dx左边的式子可以用分部积分法进行求解,得到:ie^{ix}f(x)-∫e^{ix}f'(x)dx=if(x)e^{ix}-∫f'(x)ie^{ix}dx由于欧拉方程表明f(x)+f'(x)=0,所以上面这个式子可以继续化简为:ie^{ix}f(x)=-if(x)e^{ix}将上面这个式子代入右边积分中,得到:ie^{ix}f(x)-∫e^{ix}f'(x)dx=-ie^{ix}f(x) 移项化简后得到:∫e^{ix}f'(x)dx=2ie^{ix}f(x)再将这个式子代回到左边积分中,得到:ie^{ix}f(x)-2ie^{ix}f(x)=C化简后得到:f(x)=Ce^{-ix}其中C为任意常数。
因此,欧拉方程的解为f(x)=Ce^{-ix}。