第五章 控制系统的稳定性分析.ppt
- 格式:ppt
- 大小:1.50 MB
- 文档页数:66


第五章 控制系统的稳定性分析5.1 已知开环系统的传递函数如下,试用劳斯判据判别其闭环系统的稳定性。
(1))3)(2()1(10)()(+++=s s s s s H s G特征方程为:01016523=+++s s s10141051610123s s ss 第一列符号为正,故闭环系统稳定(3) )05600300(100)()(22++=s s s s H s G 特征方程为 010050600300234=+++s s s列劳斯表 10012001005006001005030001234-ss ss s第一列符号为负系统不稳定,根据符号变化的次数可判断系统正根数为2 5.2 已知单位负反馈系统开环传递函数如下)12()(22++=s w ws s K s G nnξ式中s r a d w n /90=,2.0=ξ试确定K 取何值闭环系统稳定。
解:系统特征方程为:0810********3=+++K s s s KK Kss ss 368100810036810010123-⎪⎩⎪⎨⎧<⇒>-⇒>->36036036)36(81000K K K K 360<<K5.3 已知系统开环传递函数为)1()1(10)()(-+=s s s K s H s G 试确定闭环系统稳定时K的临界值。
解:系统闭环特征方程为010)110()()(12=+-+=+K s K s s H s GKK K ss s100110101012-⎩⎨⎧>≥⇒≥-01.00110K K K 1.0≥⇒K 临界值K=0.15.5 设闭环反馈控制系统特征方程如下,试确定有几个根在右半[s]平面 (2)08024102234=++++s s s s801048022428010101234-ss ss s第一列有负号出现系统不稳定,有2个右根 (4) 01249332345=----+s s s ss124.8125.71812001293431012345-------ss s ss s辅助方程为 01293)(24=--=s s s Fs s s F dsd 1812)(3-=0)1)(4(31293)(2224=+-=--=s s s s s F22,1±=s 14,3j s ±= 有1个右根5.6 单位反馈系统开环传递函数为)3)(2()(10)(+++=s s s a s s G ,试确定(1)使系统稳定的a 值(2) 使系统特征根均落在[s]平面中Re=-1这条线左边的a 值。
第五章稳定性分析第五章:控制系统的稳定性分析3.3.5 控制系统的稳定性分析稳定性的概念线性系统稳定的充要条件线性系统稳定的必要条件代数判据(⼀般情况,特殊情况,劳斯,赫尔维茨)劳斯判据的应⽤(确定稳定域判断稳定性,求系统的极点,设计系统中的参数3.3.5.1 稳定性的概念分析⼩球平衡点的稳定性定义:若线性控制系统在初始扰动的影响下,其过渡过程随着时间的推移逐渐衰减并趋向于零,则称该系统为渐近稳定,简称稳定。
反之,若在初始扰动的影响下,系统的过渡过程随时间的推移⽽发散,则称该系统不稳定。
3.3.5.2线性系统稳定性的充要条件设系统的微分⽅程模型为:分析系统的稳定性是分析在扰动的作⽤下,当扰动消失后系统是否能回到原来的平衡状态的性能,亦系统在作⽤下的性能,亦与系统的输⼊信号⽆关,只与系统的内部结构有关。
对上述微分⽅程描述的系统亦只与等式的左端有关,⽽与右端⽆关,亦:系统的稳定性是由下列齐次⽅程所决定:其稳定性可转化为上述齐次⽅程的解c(t)若则系统稳定,则系统不稳定。
分析齐次⽅程的解的特征。
由微分⽅程解的知识,上述⽅程对应的特征多项式为:设该⽅程有k个实根(i=1,2,…k)r对复根(i=1,2,…r)k+2r=n 且各根互异(具有相同的根时分析⽅法相同,推导稍繁琐)则上述齐次⽅程的⼀般解为:其中为常数,由式中的决定,分析可见:只有当时,否则。
注:只能是⼩于零,等于或⼤于均不⾏。
等于零的情况为临界稳定,属不稳定。
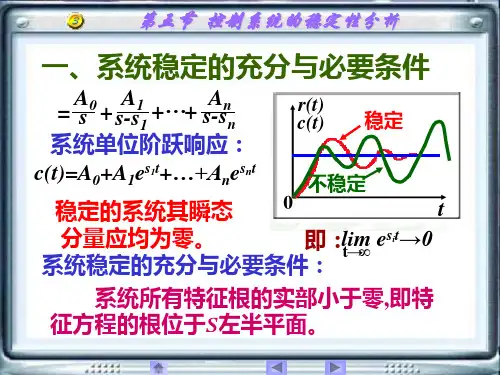
综:线性系统稳定的充要条件(iff)是:其特征⽅程式的所有根均为负实数或具有负的实部。
亦:特征⽅程的根均在根平⾯(复平⾯、s平⾯)的左半部。
亦:系统的极点位于根平⾯(复平⾯、s平⾯)的左半部。
从上⾯的充要条件可以看出:系统稳定性的判断只需计算上系统的极点,看其在s平⾯上的位置,勿需去计算齐次⽅程的解(当系统复杂时的计算可能很繁),勿需去计算系统的脉冲响应。
3.3.5.3 线性系统稳定的必要条件设系统特征⽅程式中所有系数均为实数,并设(若,对特征⽅程两端乘(-1)),可以证明上述特征⽅程中所有系数均⼤于零(即)是该特征⽅程所有根在s平⾯的左半平⾯的必要条件。