车辆电控大作业-发动机转速信号采集与控制
- 格式:docx
- 大小:352.29 KB
- 文档页数:13
摘要:介绍一种简单、便携、多功能的发动机转速信号模拟器,采用PWM信号逼近的方法生成幅值随发动机转速变化的磁电信号,采用输出比较的方式输出霍尔信号。
该模拟器可以方便地设定发动机参数和实时在线修改发动机转速,并能够实时显示。
实验结果表明,该模拟器具有信号精度高、发动机转速范围大的特点。
引言随着发动机电控系统的结构和控制策略日趋复杂,电控系统的研发工作难度以及实验工作量大大增加,成本也大幅度提高。
V型开发模式已经成为发动机ECU(Electronic Control Unit,电子控制单元)开发流程的主流,其中的硬件在环仿真中,为了配合ECU软件的开发,需要模拟发动机的转速信号来验证软件算法的正确性。
目前已经有很多研发人员已经做了这方面的研究。
例如,清华大学的章健勇开发的发动机转速模拟器系统利用数字端口实现了大转速范围内发动机转速霍尔信号的模拟;北京理工大学的王宇明设计的便携式发动机工况信号模拟器,能够比较真实地模拟发动机传感器信号的类型、形态,基于模型的信号产生方法能够较好地反映发动机工况变化中传感器的内在关系,并且提出了把霍尔信号通过硬件逐步转化成为磁电信号的方法;北京城建设计研究总院的赵华伟设计的转速模拟器采用硬件方式产生频率方波信号和电流信号的方法,不仅能够提供发动机所需的方波信号,而且频率调节精度高,能够实现电流的输出。
这些模拟器尚不能模拟得到理想的磁电信号,并且对发动机参数变化的适应性很差。
本文提出一种生成标准磁电正弦信号的方法,并在此基础上设计了一款便携、灵活的发动机转速信号模拟系统。
磁电正弦信号可以通过硬件转化和软件逼近两种方法得到,实验证明前者得到的磁电信号精度不高,与真实磁电信号差异较大,所以本文采用软件逼近的方法。
软件分段逼近分为DA分段逼近和PWM分段逼近。
DA分段逼近的方法需要外扩一块D/A芯片,且转化过程需要占用大量单片机资源,不能满足高频的需求,所以本文选用PWM分段逼近的方法。
汽车发动机转速信号采集系统
一.传感器
目前发动机转速采集按传感器类型主要分电磁感应式、霍尔效应式和光电式3种。
其中霍尔效应转速传感器是利用霍尔效应原理制成的。
其输出的信号是矩形脉冲信号,很适合于数字控制系统,抗干扰能力强,而且输出电压信号稳定,只要存在磁场,霍尔元件总是产生相同的电压,其大小与转速无关,即使是在发动机起动的低转速状态下,仍能够获得较高的检测精度。
开关式霍尔元件,遮磁转子位于曲轴上,当转子位于永磁体与霍尔元件之间时,无磁通量穿过霍尔元件,则不产生霍尔电势。
反之,则在电路中产生一个霍尔电势脉冲。
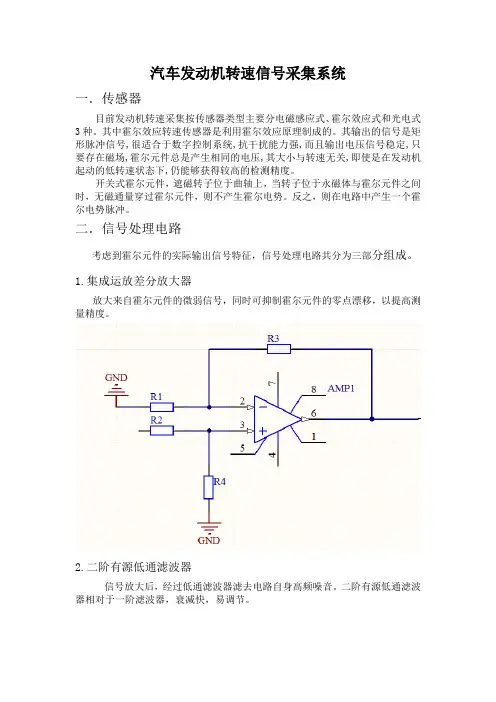
二.信号处理电路
考虑到霍尔元件的实际输出信号特征,信号处理电路共分为三部分组成。
1.集成运放差分放大器
放大来自霍尔元件的微弱信号,同时可抑制霍尔元件的零点漂移,以提高测量精度。
2.二阶有源低通滤波器
信号放大后,经过低通滤波器滤去电路自身高频噪音。
二阶有源低通滤波器相对于一阶滤波器,衰减快,易调节。
3.施密特触发器
霍尔元件输出的是类似正弦波的电压信号,其幅值变化不定,属于模拟信号。
要用单片机或者ECU处理的话,需要由施密特触发器将其转换为对应电平的方波。
信号处理电路整体如下
三.后续处理
其后可将测量电路接入单片机或ECU,按时钟频率计数,计算发
动机转速。
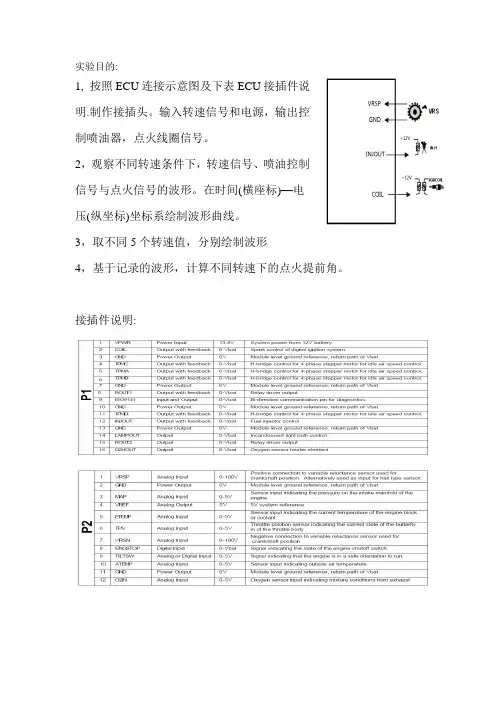
实验目的:1, 按照ECU连接示意图及下表ECU接插件说明.制作接插头。
输入转速信号和电源,输出控制喷油器,点火线圈信号。
2,观察不同转速条件下,转速信号、喷油控制信号与点火信号的波形。
在时间(横座标)—电压(纵坐标)坐标系绘制波形曲线。
3,取不同5个转速值,分别绘制波形4,基于记录的波形,计算不同转速下的点火提前角。
接插件说明:观察喷油实验步骤一、接线1、用单股跳线将HCS12飞翔开发板JP5上的PB0口与ECU 的P2上端口1(VPWR )连接,用单股跳线将HCS12飞翔开发板上的Vss 与ECU 的P2上的端口2(GND)连接。
JP5PB0VSSGND2、将ECU的P1上的端口1(VPWR)和端口3(GND)分别与外接12V电源的正负极连接。
3、将线圈一端与12V电源的正极相连,线圈另一端与ECU的P1上的端口12(INJOUT )连接。
4、示波器通道一与HCS12飞翔开发板上JP5的PBO口和GND相连,将通道二与ECU的P1上的端口12(INJOUT )连接。
二、执行实验并观察实验现象1、打开HCS12飞翔开发板和ECU的电源。
2、运用示波器通道一采集喷油时刻和喷油持续时间信号,用通道二采集模拟发动机转速信号,所采集信号如下图1所示,图中蓝色方波即为模拟发动机转速信号,可以看出其一个周期有12个低电平;图中黄色信号为喷油信号,其波形下降沿为开始喷油时刻,下降沿和上升沿之间的时间宽度即为喷油持续时间。
图一示波器波形观察点火实验步骤其它步骤与上实验相同,第1.4项调整为4、示波器通道一与HCS12飞翔开发板上JP5的PBO口和GND相连,将通道二与ECU的P1上的端口2(coil )连接。
运用示波器通道一采集采集模拟发动机转速信号,用通道二采集点火信号。
第二篇汽车电子控制技术第八章电子控制原理基础一.名词解释1.ROM:只读存储器2.RAM:随机存储器3.A/D转换器:数据模拟转换器,将模拟信号转换为数字信号然后被微处器接受。
二.填空题1.曲轴位置传感器一般有磁电式、霍尔式、光电式等多种。
2.氧传感器的作用是:(1)通过检测排气中的氧含量,检测发动机的空燃比;(2)在闭环控制用于喷油脉宽的修正;(3)检测催化转换器的转换效率。
3.爆震传感器的作用是:用来检测发动机是否发生爆震。
4.模拟信号是一个连续变化的电量,往往用信号电压的幅值来表示信号的量值。
5.在发动机ECU中I/O表示:输入/输出接口。
6.在发动机ECU中A/D表示:模数转换器。
三.思考题1.发动机转速与曲轴位置传感器的作用是什么?答:采集曲轴转动角度和发动机转速信号并输入控制单元(ECU),电子控制器根据此信号确定点火正时和喷油正时、产生点火和喷油控制脉冲、控制燃油泵工作等。
在无分电器电子控制点火系统和控制各缸工作顺序喷油的燃油喷射系统中,曲轴位置传感器还用于识别气缸。
2.试述各种空气流量传感器的结构与工作原理。
答:1)翼片式空气流量传感器结构:主要由检测部件、电位计、调整部件、接线插座和进气温度传感器5部分组成。
工作原理:当吸入发动机的空气流过传感器主进气道时,传感器翼片就会受到空气气流压力产生的推力力矩和复位弹力力矩的作用,当空气流量增大时,气流压力对翼片产生的推力力矩增大,推力力矩客服弹力力矩使翼片偏转角度α增大,直到推力力矩与弹力力矩平衡为止。
进气量越大,翼片转角α也就越大。
2)量芯式空气流量传感器结构:量芯、电位计、进气温度传感器和线束插座组成。
工作原理(与翼片式传感器相似)。
3)热丝式与热膜式空气流量传感器结构:1】热丝式结构:由铂金丝、控制电路等组成。
工作原理:传感器工作时,铂金属丝将被控制电路提供的电流加热到高于进气温度的120℃,由于进气温度变化会使热丝的温度发生变化,而影响进气量的测量精度。
汽车发动机电控系统实训一、实训目的在汽车维修领域,发动机电控系统是一项重要的技术。
掌握了发动机电控系统的原理和操作方法,能够快速准确地对发动机进行故障诊断和修复,提高维修效率。
本次实训的目的是让学员了解汽车发动机电控系统的工作原理和调试方法,培养其实际操作能力。
二、实训内容1. 发动机电控系统简介发动机电控系统是控制汽车发动机运行的核心系统,包括发动机控制单元(ECU)、传感器、执行器等组成。
通过对各个模块的信号采集、处理和控制,实现对发动机燃油喷射、点火时机等关键参数的精确控制,从而保证发动机的高效运行。
2. 发动机传感器的作用与原理在发动机电控系统中,传感器起到了采集各种参数信号的作用。
常见的传感器包括氧气传感器、曲轴位置传感器、进气压力传感器等。
它们通过测量相应的物理量,并将其转换成电压信号,再传输给发动机控制单元进行处理。
3. 发动机执行器的作用与原理发动机执行器是控制发动机运行状态的重要组成部分。
常见的执行器包括喷油器、点火器等。
喷油器根据发动机控制单元的指令,喷射适量的燃油到气缸内,控制燃油的供给量和喷射时机;点火器则根据发动机控制单元的指令,准确地点火,提供点火能量。
4. 发动机电控系统故障诊断与排除发动机电控系统的故障排除是一项复杂的任务,需要维修人员掌握一定的技巧和经验。
在实训过程中,学员将学习故障诊断的基本步骤和方法,并通过模拟实际故障情况,进行故障排除实践。
在实训过程中,学员将学习故障诊断的基本步骤和方法,并通过模拟实际故障情况,进行故障排除实践。
三、实训流程1.学员将会首先了解发动机电控系统的工作原理和结构组成,包括发动机控制单元、传感器和执行器等。
2.接下来,学员将进行氧气传感器的检测与调试。
包括传感器的安装和接线、使用示波器检测传感器输出信号等步骤。
3.随后,学员将学习进气压力传感器的检测与调试方法。
包括传感器的安装和接线、使用多用表检测传感器输出信号等步骤。
4.在学习了传感器的检测与调试后,学员将进一步学习发动机执行器的检测与调试方法。
发动机点火控制汽油发动机采用微机控制点火控制点火系统能将点火提前将点火提前角控制在最佳值,使可燃混合气燃烧后产生的温度和压力达到最大值,从而通过发动机的动力性,同时还能提高燃油经济型和减少有效气体的伤害。
发动机点火能量的高低取决于点火线圈通电时间的长短即点火导通角,点火导通角的大小与蓄电池的电压和转速有着直接的关系,在电控发动机上可以实现对点火导通角有效的控制。
使发动机产生最大动力的有效方法增大点火提前角。
但是点火提前角过大又会引起发动机爆震,发动机爆震一方面会导致发动机输出功率降低,另一方面会导致发动机使用寿命缩短甚至损坏。
消除爆震最有效的方法就是推迟点火提前角。
在电控发动机上采用爆震控制。
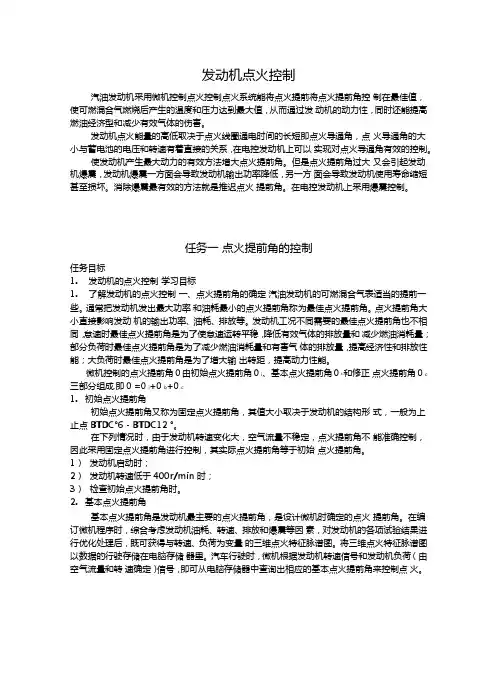
任务一点火提前角的控制任务目标1.发动机的点火控制学习目标1.了解发动机的点火控制一、点火提前角的确定汽油发动机的可燃混合气表适当的提前一些。
通常把发动机发出最大功率和油耗最小的点火提前角称为最佳点火提前角。
点火提前角大小直接影响发动机的输出功率、油耗、排放等。
发动机工况不同需要的最佳点火提前角也不相同,怠速时最佳点火提前角是为了使怠速运转平稳,降低有效气体的排放量和减少燃油消耗量;部分负荷时最佳点火提前角是为了减少燃油消耗量和有害气体的排放量,提高经济性和排放性能;大负荷时最佳点火提前角是为了增大输出转距,提高动力性能。
微机控制的点火提前角0由初始点火提前角0 i、基本点火提前角0 b和修正点火提前角0 c 三部分组成,即0 =0 i+0 b+0 c1.初始点火提前角初始点火提前角又称为固定点火提前角,其值大小取决于发动机的结构形式,一般为上止点BTDC°6 - BTDC12 °。
在下列情况时,由于发动机转速变化大,空气流量不稳定,点火提前角不能准确控制,因此采用固定点火提前角进行控制,其实际点火提前角等于初始点火提前角。
1)发动机启动时;2)发动机转速低于400r/min 时;3)检查初始点火提前角时。
摘要电动助力系统采用电动机提供助力,具有转向力可变、路感良好、环保、耗能低和维修方便等优点,充分体现出汽车向智能化发展、满足未来安全性要求和环保要求的发展趋势。
本文在深入学习电动助力系统工作原理的基础上,设计了电动助力系统控制单元的硬件电路,研究了控制策略和算法,开发了相应的软件程序,印制了电路板,在自行搭建的试验平台上进行了实验验证。
具体工作内容如下:1. 研究了电动助力转向系统的发展和系统的基本原理;2. 在充分考虑满足电动助力控制单元功能需求的基础上,开发了一套基于单片机80C552的电机控制方案:利用电子执行单元(ECU)实时采集信号,运用PWM技术实现对H桥和电动机进行电流闭环控制,并完成了硬件电路设计;3. 在保证汽车的稳定性和安全性条件下,通过深入研究助力控制、回正控制和阻尼控制策略,提出了基于PID的控制算法,开发了核心控制程序;上述研究工作实现了电动助力系统低速轻便、高速稳定的使用要求,为下一步的工程实用化奠定了先期技术基础。
关键词:电动机,PID,控制策略,PWMAbstractEPS is a kind of power steering system following the system of hydraulic, motor was adopted to offer power directly. EPS has many advantages such as adjusted power which is controlled by the automatically controlling unit,good way sense,environmental protection,low energy consumption, convenient maintenance. The development trend of intelligent vehicles, future security requirements and environmental requirements was fully represented by EPS.In this thesis the Electronic Control Unit (ECU) and the software program of the ECU was designed, control strategies and algorithm were also studied based on the study of the operation principles of EPS. Following is the detailed process:1. Basic components, working principle and mathematical model of Brushless DC Motor (BLDCM) were described in detail.2. While the functions of ECU were considered, a scheme of motor control based on the high-performance microcontroller 80C552 was put forward and the ECU was designed. PWM technique was used to control H and closed loop motor current.3. Three control strategies which are assisting mode return ability and damp mode to get a stable steering under various conditions was presented and discussed in this paper. And a control algorithm based on PID was proposed under the strategies.The research above make the A/D acquisition program, speed signal acquisition program of the Electric power steering system come true, and t it laid a practical basis for the next preliminary technology.Keywords: MOTOR; PID; Control Strategy; PWM目录摘要 (Ⅰ)Abstract (Ⅱ)目录 (Ⅲ)第一章绪论 (1)1.1电动助力转向系统 (1)1.1.1电动助力转向系统的原理及发展 (1)1.1.2 电动助力转向系统控制单元 (3)1.2国内外研究现状 (4)1.3课题研究的目的和意义 (6)1.4本文研究内容 (6)第二章助力特性和控制策略研究 (8)2.1助力特性分析 (8)2.1.1助力特性的概念 (8)2.1.2助力特性曲线分类 (9)2.2控制模式 (10)2.2.1助力控制 (11)2.2.2回正控制 (12)2.3控制策略研究 (13)2.3.1电机目标转矩的控制策略 (13)2.3.2助力电机的电流控制策略 (14)2.3.3控制算法 (14)2.4本章小结 (16)第三章硬件控制系统设计 (17)3.1 EPS控制系统的总体结构 (17)3.2 ECU的控制芯片 (18)3.3电源电路和信号处理电路 (19)3.3.1电源电路 (19)3.3.2扭矩信号 (20)3.4电机的控制电路和保护电路 (21)3.4.1电动机的PWM调压调速原理 (22)3.4.2功率开关部件的选择及其驱动电路 (24)3.4.3电动机的保护电路 (25)3.5故障诊断电路 (26)3.6系统硬件的抗干扰性设计 (27)3.7本章小结 (27)第四章EPS控制软件设计 (28)4.1系统控制软件概述 (28)4.2 转向盘转矩信号采集子程序 (29)4.3 车速信号的采集子程序 (29)4.4 目标电流的确定 (30)4.4.1 助力曲线与目标电流 (30)4.4.2 助力特性曲线的确定 (30)4.5 PWM 脉宽调制及电机控制 (31)4.6 判断转向子程序 (31)4.7 软件滤波设计 (31)4.8 本章小结 (32)结论及展望 (33)致谢 (35)参考文献 (36)附录 (38)第一章绪论汽车转向系统作为汽车的重要组成部分,决定着汽车主动安全性的关键,汽车是否具有安全的操作性能,始终是消费者最关心的,也是汽车厂商在日趋激烈的市场竞争中站稳,始终是消费者最关心的,也是汽车厂商在日趋激烈的市场竞争中站稳脚跟的根本。
公交车辆发动机电控系统波形采集及分析随着城市公共交通的大力发展,北京公交在北京市政府的大力支持下,北京公交获得了长足的发展。
公交车辆采用了大批先进的汽车电子技术,车辆上的电子元件及电子控制系统日益增加,公交车辆已经进入了电子控制时代。
传统的维修方法已经不能够适应现在维修形势,数据流和波形分析诊断故障法是排除电控发动机故障的基本方法,借助解码器及示波器诊断电控故障已经成为一种趋势。
由于这种方法需要一定的理论基础和一些必要的技术数据,所以在排除一般电控发动机故障时采用的较少,而大都用在排除电控发动机的疑难故障上。
随着公交车辆投入运营的时间不断增长,各种疑难故障发生的频率越来越高,为了更准确、及时的找到故障原因,现以发动机电控系统中常见传感器为例,论述如何利用示波器采集传感器信号波形,及如何分析采集的信号波形进行故障诊断。
1发动机电控系统的组成发动机电控系统(EEC)是发动机控制系统的核心,它由动力控制模块(PCM)、传感器、执行器、接线和相关部件组成。
动力控制模块:是一台微电脑,它不断评估和处理来自发动机控制系统的输入信号,并向外输出最佳的控制指令。
传感器:动力控制模块通过发动机上的各种传感器随时监测发动机的工作,其中包括发动机冷却液温度传感器(ECT)、歧管绝对压力(MAP)传感器、进气温度(IAT)传感器、曲轴转速传感器、凸轮轴位置传感器、机油压力传感器、空气流量传感器、节气门位置传感器等。
执行器:动力控制模块通过某些输出装置控制空燃比、点火正时和发动机的怠速。
这些输出装置包括喷油器、点火模块、废气再循环阀(EGR)和怠速旁通阀(IAC)等。
2示波器采集电子信号的方法及波形分析在利用示波器采集这些电器元件的信号时,必须充分了解电控系统的工作原理及相关技术参数。
以下主要以康明斯柴油和依维柯燃气发动机上常用传感器为例阐述如何利用示波器采集传感器及执行器信号及如何分析采集的信号。
2.1温度传感器公交车辆上使用的绝大部分温度传感器都是负温度系数的热敏电阻(依维柯三元催化温度传感器为正温度系数热敏电阻)。
汽车电子技术与发动机控制作业指导书第1章汽车电子技术概述 (3)1.1 汽车电子技术的发展历程 (3)1.2 汽车电子技术的应用领域 (3)1.3 发动机控制技术的发展趋势 (4)第2章发动机控制基础 (4)2.1 发动机工作原理 (4)2.2 发动机控制单元(ECU) (4)2.3 发动机控制系统的功能与组成 (5)第3章燃油喷射控制技术 (5)3.1 燃油喷射系统概述 (5)3.2 电子控制燃油喷射(EFI)系统 (6)3.2.1 EFI系统的组成 (6)3.2.2 EFI系统的工作原理 (6)3.3 燃油喷射控制策略 (6)第4章点火控制技术 (7)4.1 点火系统概述 (7)4.2 电子点火系统(ESA) (7)4.2.1 点火控制器 (7)4.2.2 点火线圈 (7)4.2.3 火花塞 (7)4.3 点火控制策略 (7)4.3.1 点火提前角控制 (7)4.3.2 火花能量控制 (8)4.3.3 火花分配策略 (8)4.3.4 点火反馈控制 (8)第5章进气与排气控制技术 (8)5.1 进气控制系统 (8)5.1.1 进气控制原理 (8)5.1.2 进气控制系统的组成 (8)5.1.3 进气控制策略 (8)5.2 排气控制系统 (8)5.2.1 排气控制原理 (8)5.2.2 排气控制系统的组成 (9)5.2.3 排气控制策略 (9)5.3 可变进气与排气技术 (9)5.3.1 可变进气技术 (9)5.3.2 可变排气技术 (9)5.3.3 可变进气与排气技术的应用 (9)第6章发动机排放控制技术 (9)6.1 废气排放物及其机理 (9)6.1.1 废气排放物种类 (9)6.2 废气排放控制策略 (10)6.2.1 燃烧优化 (10)6.2.2 废气再循环(EGR) (10)6.2.3 氧传感器反馈控制 (10)6.2.4 废气后处理 (10)6.3 三元催化转化器 (10)6.3.1 三元催化转化器原理 (10)6.3.2 三元催化转化器结构及材料 (10)6.3.3 三元催化转化器功能影响因素 (10)6.3.4 三元催化转化器失效原因及防护措施 (10)第7章发动机怠速控制技术 (10)7.1 怠速控制系统概述 (11)7.2 怠速控制策略 (11)7.3 怠速控制系统的应用 (11)第8章发动机增压控制技术 (12)8.1 增压技术概述 (12)8.1.1 增压原理 (12)8.1.2 增压分类 (12)8.1.3 增压技术的应用 (12)8.2 涡轮增压控制系统 (12)8.2.1 涡轮增压器 (12)8.2.2 涡轮增压控制策略 (12)8.2.3 涡轮增压控制系统组成 (13)8.3 机械增压控制系统 (13)8.3.1 机械增压器 (13)8.3.2 机械增压控制策略 (13)8.3.3 机械增压控制系统组成 (13)第9章发动机故障诊断与排除 (13)9.1 故障诊断方法 (13)9.1.1 人工诊断法 (13)9.1.2 借助仪器诊断法 (14)9.1.3 数据分析诊断法 (14)9.2 常见故障诊断与分析 (14)9.2.1 启动困难 (14)9.2.2 发动机异响 (14)9.2.3 动力不足 (14)9.2.4 油耗过高 (14)9.3 故障排除与维修 (14)9.3.1 故障排除流程 (14)9.3.2 故障维修方法 (15)9.3.3 注意事项 (15)第10章汽车电子技术应用案例 (15)10.1 智能启停技术 (15)10.1.2 起停系统的关键传感器和执行器 (15)10.1.3 起停系统在不同工况下的控制策略 (15)10.1.4 起停系统在实际应用中的效果评估 (15)10.2 发动机节能技术 (15)10.2.1 发动机电控燃油喷射系统 (15)10.2.2 可变气门正时技术 (15)10.2.3 废气涡轮增压技术 (15)10.2.4 发动机热管理系统 (16)10.3 纯电动汽车电子控制技术 (16)10.3.1 电池管理系统 (16)10.3.2 电机控制系统 (16)10.3.3 车辆稳定控制系统 (16)10.3.4 能量回收系统 (16)10.4 混合动力汽车电子控制技术 (16)10.4.1 发动机与电动机协同控制策略 (16)10.4.2 动力电池管理系统 (16)10.4.3 混合动力汽车能量分配策略 (16)10.4.4 混合动力汽车驾驶模式切换控制 (16)第1章汽车电子技术概述1.1 汽车电子技术的发展历程汽车电子技术起源于20世纪50年代,最初仅应用于照明、信号等基础功能。
专利名称:汽车转速信号采集和调理电路专利类型:实用新型专利
发明人:霍从崇,陈伟,陈鹏
申请号:CN200920221925.3
申请日:20091103
公开号:CN201828572U
公开日:
20110511
专利内容由知识产权出版社提供
摘要:本实用新型公开了一种汽车转速信号采集和调理电路,包括有信号输入接口和输出接口,其特征在于:转速信号采集点VI与电阻R4一端相连,电阻R4另一端和比较器同相输入端相连;电阻R1的一端接二极管D1的负极,另一端接电阻R2、稳压管U1的阴极和参考极;电阻R2的另一端与电阻R3相连,电阻R2、电阻R3的公共端接比较器的反相输入端;二极管D1的正极接电源VCC,稳压管U1的阳极和电阻R3的另一端接地;比较器输出端VO为调理信号。
本实用新型电路结构简单实用,适用性好,可以根据实际更改参数以满足不同车辆的转速采集调理要求。
申请人:天津市松正电动科技有限公司
地址:300308 天津市空港物流加工区西十道一号
国籍:CN
更多信息请下载全文后查看。
发动机转速信号采集
张弛;毛宁;常博博;刘骁;梁欣颖;马振华
【期刊名称】《自动化应用》
【年(卷),期】2014(000)004
【摘要】介绍采集航空发动机非连续转速信号的波形转换电路、可编程逻辑电路设计,以及将测频法和测周法结合起来进行频率信号采集的软件设计方法,以实现对发动机转速状态的监控.
【总页数】3页(P80-82)
【作者】张弛;毛宁;常博博;刘骁;梁欣颖;马振华
【作者单位】中航工业计算所,西安710119;中航工业计算所,西安710119;中航工业计算所,西安710119;中航工业计算所,西安710119;中航工业计算所,西安710119;中航工业计算所,西安710119
【正文语种】中文
【相关文献】
1.DSP在发动机转速信号采集中的应用 [J], 陈朝基;靳红涛;赵勇进
2.航空发动机转速传感器频率信号采集方法 [J], 高颖;李兵强;常晨晨;于小燕;
3.从两例发动机转速异常问题讨论离合器对发动机转速影响 [J], 王震华;任宪丰;闫立冰
4.从两例发动机转速异常问题讨论离合器对发动机转速影响 [J], 王震华;任宪丰;闫立冰
5.基于TMS320F2812的航空发动机转速信号采集研究 [J], 强宁
因版权原因,仅展示原文概要,查看原文内容请购买。
这是车辆电子控制技术的一个课程作业:设计一个电控系统(硬件和软件),该系统可按照SAEJ1939采集发动机油门踏板和发动机转速信号,如果监测到的发动机转速超过1600rpm,则控制发动机转速稳定工作在1600rpm。
要求:画出电路原理图和PCB图(自行选择单片机、接口电路和绘图软件),给出相关的源程序(编程语言不限)。
备注:禁止任何形式的抄袭,如发现抄袭无论被抄袭者还是抄袭者,该作业一律0分。
发动机转速信采集与控制的设计作业分析:为完成此项目,首先要确定硬件系统,从而利于进行软件的设计;第二了解SAEJ1939通讯协议,以便进行发动机油门踏板信号和发动机转速信号的解析;第三进行软件编程,实现对硬件系统的初始化,通过CAN总线接收油门踏板信号与转速信号的数值,控制电路实现对发动机稳定转速1600rpm的控制。
(一)硬件系统设计系统核心MCU采用MC9S12XDP512单片机,负责采集传感信号,实现CAN总线通讯,输出信号控制输出电路。
整车硬件系统采用MC9S12XDP512单片机,由频率量采样电路、模拟量采样电路、驱动电路、CAN总线通讯电路组成,通讯速率250kps。
图1 硬件系统原理频率量采样电路实现对发动机转速、空气流量传感器等具有脉冲输出的功能信号的采集,同时也能实现对开在信号的采集。
模拟量采样电路可以实现对怠速、点火、启动、空档、空调等开关信号的采集,也能实现对空气流量传感器、曲轴、凸轮轴、节气门等位置传感器信号的采集,还能实现对进气、冷却液等热电阻温度传感器信号的采集。
驱动电路实现对电磁喷油器的PWM控制,对电动汽油泵继电器的通断控制。
CAN总线接口电路实现与整车总线的连接,采集发动机转速、油门的开度信号;实现数据的上传;实现软件升级下载。
1. 供电电路设计图2 供电电路设计设定车载供电为24V,电压波动范围是16V至32V。
如果车载供电电压为12V,则将LM2937-12的输入与输出短接即可。
在此电路设计中增加输入电压钳位保护,利用SMCJ36A将输入电压保护在36V以下,实现对LM2575的保护;利用SMAJ6.0A将单片机工作电压保护在6V以下,防止在调试时操作不当,由于电压过高损坏单片机。
车载传感器可由VCC或+12VDC、+24VDC供电。
2. CAN总线电路设计图3 CAN总线电路设计相对而言,PCA82C251相对其它芯片TJA1050、TJA1040、具有更广范围的供电电压,因此选用82C51。
这终端电阻设置在总线拓扑的首尾,并在CANH和CANL上,通常而言总线距离在500m内这两个电阻为120Ω,由于车辆内部总线长度不会超过500m,因此装甲车辆的CAN总线的终端电阻为120Ω。
在总线上,串联两个5.1欧的电阻,起到限流作用,保护82C51,同时增加保护二极管PESD1CAN。
3. 模拟量采样电路设计图4 模拟量采样电路设计模拟量输入与开关信号输入共用电路。
实现对0-5V信号的AD转换,以及0-24V开关信号的检测。
此电路也可实现对频率量的检测,只需将电路与单片机的输入捕捉通道连接即可,对MC9S12而言,接到PT通道即可。
4. 驱动电路设计图5 额定电流3.7A最大瞬态电流12A驱动电路设计驱动电路设计了两类,一类是驱动小电流负载的,额定电流为3.7A,但实际中会降额使用,一般不大于2A电流的负载会使用这个电路,对于喷油的电磁阀是适用的。
当负载电流大时,可以使用图6的驱动电路。
图6 额定电流44A最大瞬态电流90A驱动电路设计这两个驱动电路,均具有状态反馈功能,控制信号加上后,是否输出24V,这是可以通过反馈的开关信号检测的。
这有利于实现故障诊断功能。
利用软件Altium Designer(16.0)完成了四层板的设计,如图7所示。
图7 四层板设计(隐藏了中间两层)(二)信号解析根据作业要求,要确认SAEJ1939协议中发动机油门踏板和发动机转速信号的形式,因此查《SAE-J1939-71协议》查到如下相关章节:5.3.6电子发动机控制器#2:EEC2传输循环率:50ms数据长度:8 字节数据页面:0PDU格式:240PDU特定:3默认优先值:3参数群数编号:61443(00F00316)1 状态—EEC18-7未定义字节6-5道路速度极限状态 5.2.6.764-3AP 换低挡装置开关 5.2.2.52-1AP低空转开关 5.2.2.42加速器踏板(AP)位置 5.2.1.83当前载入百分比 5.2.1.74远程加速器 5.2.1.595-8未定义5.3.7电子发动机控制器#1:EEC1传输循环率:由发动机速度决定数据长度:8 字节数据页面:0PDU格式:240PDU特定:4默认优先值:3参数群数编号:61444(00F00416)1 状态—EEC18-5未定义字节4-1发动机/减速器扭矩模式 5.2.2.12主动轮命令发动机—扭矩百分比 5.2.1.43实际发动机—扭矩百分比 5.2.1.54-5发动机速度 5.2.1.96针对发动机控制的控制设备源地址 5.2.5.2985.2.1.8加速踏板位置这是指加速踏板的实际位置和最大踏板位置的比值。
虽然它是用于输入对传动系统的要求,但它也可以为传动和ASR算法提供关于驱动器操作的预设信息。
数据长度:1字节分辨率:0.4%/位递增,从0 % 开始计算数据范围:0%到100%类型:测量值可疑参数编号:91参考: 5.3.65.2.1.9发动机转速这是指转过720度最小曲轴角的速度除以气缸的数目所得到的实际发动机转速。
数据长度:2字节分辨率:0.125 rpm/位递增,从0 rpm开始计算(高位字节分辨率=32 rpm/位)数据范围:0到8031.875 rpm类型:测量值可疑参数编号:190参考: 5.3.7J1939是一种支持闭环控制的在多个ECU之间高速通信的网络协议冈。
主要运用于载货车和客车上。
它是以CAN2.0为网络核心。
表1介绍了CAN2.0的标准和扩展格式,及J1939协议所定义的格式。
表1则给出了J1939年的一个协议报文单元的具体格式。
可以看出,J1939标识符包括:PRIORTY(优先权位);R(保留位);DP(数据页位);PDU FORMAAT(协议数据单元);PDU SPECIFIC(扩展单元)和SOURCE ADDRESS(源地址)。
而报文单元还包括64位的数据场。
表1CAN2.0的标准和扩展格式及J1939协议所定义的格式由表1:可得到如下计算CAN总线帧标识符的公式:CAN_ID = [占3位的优先级(P)00B]H‘+’[参数组编号(PGN)D]H‘+’[源地址]H注:B为二进制;D为十进制;H为16进制,最终均强制转换为16进制。
‘+’代表字符串按顺序联接在一起。
对于油门位置信息:优先级3,参数组编号61443D,源为00H,即来源于发动机1则AcceleratorPedalPosition=[01100B]H‘+’[61443D]H‘+’[00H]H=0CH‘+’F003H‘+’00H=0CF00300H因此可以得到:(三)软件设计1. 硬件的资源分配在设计软件之前,一定先进行硬件的资源分配,即进行信号采集,通讯,控制输出等的通道配置。
如表2。
表2 控制器硬件资源分配2. 软件流程分析实际的发动机转速控制是很复杂的,为简化处理,假定喷油器控制使能时,代表喷油量增大,转速增加,喷油器控制清零时,代表喷油量减小,从而转速减小。
程序流程如图8。
图8 发动机转速控制流程3. 程序设计要点分析(1)总线标识符的设定为了实现程序的良好维护性,一般定义标识符,以代替实际的数字帧号。
//定义加速踏板位置(油门)CAN总线标识符AcceleratorPedalPosition,ID号0CF00300unsigned long AcceleratorPedalPosition =(((0x0CF00300<<1)&0x3FF80000)<<2)|((0x0CF00300<<1)&0x000FFFFF|0x00180000);#define AcceleratorPedalPosition_0 ((AcceleratorPedalPosition&0xFF000000)>>24)#define AcceleratorPedalPosition_1 ((AcceleratorPedalPosition&0x00FF0000)>>16)#define AcceleratorPedalPosition_2 ((AcceleratorPedalPosition&0x0000FF00)>>8)#define AcceleratorPedalPosition_3 (AcceleratorPedalPosition&0x000000FF)对于XDP512单片机而言,是由CAN0TXIDR0、CAN0TXIDR1、CAN0TXIDR2、CAN0TXIDR3是来保存扩展帧的标识符的。
总线扩帧:为上图蓝色与红,第0字节为MID28-MID21;第1字节为MID20-MID18+空2位+MID17-MID15;第2字节为MID14-MID7;第3字节为MID6-MID0+空1位。
因此对于扩展帧标识符的定义是:(1)整个标识符左移1位,(0x0CF00300<<1),是为了空出第3字节的最低的空1位;之后再按位与0x3FF80000,((0x0CF00300<<1)&0x3FF80000),是为了得到高11位,其余位均去除;之后再左移两位,(((0x0CF00300<<1)&0x3FF80000)<<2,是为了空出第2字节的中间空的两位。
这样就得到了待存入标识符寄存器中的31-19位;(2)整个标识符左移1位,(0x0CF00300<<1),是为了空出第3字节的最低的空1位;之后再按位与0x000FFFFF,(0x0CF00300<<1)&0x000FFFFF,是为了得到低20位,其余位去除,注意第19位为扩展标识位,扩展帧时必须为1,因此不是按位与0x0007FFFF。
之后再按位或,((0x0CF00300<<1)&0x000FFFFF|0x00180000),即可得到低20位在标识符寄存器中的排列。
注意,第20位,扩展模式下,设置为1,因此是按位或0x00180000。
(3)将1、2步得到的值按位或,即得到所需符合S12单片机所要求的标识符。