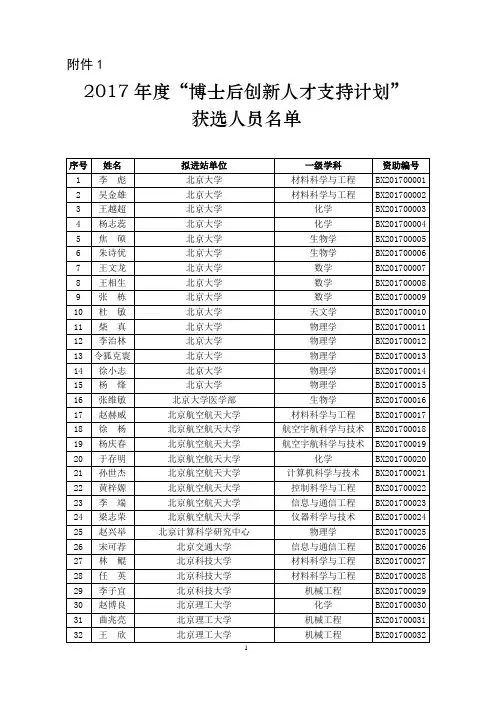
2017年中国博士后科学基金第61批面上资助拟资助人员名单
- 格式:pdf
- 大小:598.56 KB
- 文档页数:53
89祖先留下的遗产:摩梭达巴经中蕴藏的文化观念与象征隐喻许瑞娟(云南民族大学 云南 昆明 650504)摘 要:摩梭人宇宙观和人观深层文化的表述多体现在达巴教的口诵经中。
达巴经内容丰富、内涵深厚,涉及摩梭人的历史文化、天文地理、社会经济、文学艺术等各个方面,达巴经里所记述的有关摩梭人的历史渊源、族称族属、战争冲突、迁徙送魂、礼仪规约是摩梭文化的源头和根基,所宣扬的敬畏自然、尊母崇舅、不忘祖恩、团结和谐、宽厚包容、趋吉禳灾理念无不体现了摩梭人的生活信仰、地方性知识以及观念意识。
通过跨文化的比较发现,达巴教与喜马拉雅地区传统宗教有许多共同之处,包含着地方性与超地方性的内容,承载与传递着摩梭传统文化与伦理观念的时代讯息,形塑与建构着族群认同与历史心性的文化边界,是摩梭人重要的文化遗产,也是中华优秀传统文化的“共有精神遗产”。
关键词:摩梭人;达巴经;文化观念;象征隐喻分类号:G122 文献标识码:A 文章编号:2096-5621(2022)02-089-10收稿日期:2022-03-18项目基金:本文系国家社会科学基金项目“泸沽湖周边多民族地区藏传佛教传播史研究”(批准号:17XMZ059)的系列研究论文及中国博士后科学基金第61批面上资助项目(资助编号:2017M613284XB)阶段性成果。
另:本文获云南省高层次人才“青 年拔尖人才”资助。
作者简介:许瑞娟(1983-),女,汉族,云南省昆明市人。
云南民族大学南亚东南亚语言文化学院,副教授,博士后,硕士研究生 导师。
研究方向:西南少数民族社会文化人类学。
摩梭人是生活在中国西南部川滇两省交界泸沽湖周边自称“纳”或“纳日”的族群,信奉民间宗教达巴教与藏传佛教。
达巴教的祭司称为达巴,达巴的权威来自于他所掌握的专门知识以及对传统规矩和习语的熟谙。
藏族宗教知识精英认为达巴一词源于藏语བཟླ་པ།,“达”是反复念诵的意思,“巴”指的是人。
①达巴即指“反复念诵的人”,是古藏语。
2017年4期 (总第175期)湖湘论坛huxiang forumNo. 4,2017General No.175党史党建中国共产党七大党章学习历史考察谭虎娃i2(1•中国延安干部学院,陕西延安71600; 2•延安大学,陕西延安716000)摘要:1945年七大通过的党章,是1928年六大之后中国共产党历经17年由弱变强、转败为胜、走向 成熟的历史产物,注入了中国共产党最新的理论与实践成果,体现了中国共产党的独立性和创造性。
七大 结束后,为了传达与落实七大路线,领会与掌握毛泽东思想,检讨群众观点和群众路线,以及检查工作和 思想作风,西北局组织掀起了学习七大党章的活动。
在普遍、有序的党章学习过程中,采用了理论与实践 相结合,发扬党内民主,发挥模范引领作用,成立专门干部业余学校培训,以及批评与自我批评等行之有 效的方法。
关键词:七大党章;毛泽东思想;党的群众路线;批评与自我批评中图分类号:D8 文献标志码:A文章编号:1004-3160 (2017) 04-0068-06党章是党的根本大法,是党的整体意志的体 现和党内的普遍行为规范,是每一位共产党员必读 之书,必修之课。
延安时期,中国共产党始终坚持 这一根本要求,多次提出要学习党章,如1939年 7月刘少奇在《论共产党员的修养》“做马克思和 列宁的好学生”一节中提到:每一个共产党员“应 该按照党章的规定力求进步,不断提高自己的觉悟 程度”_4;1940年10月17日中共中央宣传部发 出《关于各抗日根据地内党支部教育的指示》,掀 起了支部教育的高潮,其中支部干部的政治教育就 包括党章的教育。
[2]1945年七大通过的新党章,是 中国共产党走向完全成熟时期的党章,是坚持以 马克思列宁主义为指导结合具体中国革命与建设的实际历史事实,在实践中发展起来的适应中国国情 与中共发展实际的根本法规。
为了使全党思想与行 动统一到新的党章上来,使党员领导干部进行一次 革命的洗礼,西北局在七大之后迅速组织掀起了普 遍、有序的党章学习教育活动。
奥斯维辛的根本恶或平庸之恶——普里莫•莱维作品中的施害者分析黄文凯谢雨君内容摘要:意大利作家普里莫•莱维是奥斯维辛集中营的亲历者、见证者与书写者,在其客观冷静的笔触下,纳粹惨无人道的奴役、屠戮与集中营“囚犯”的境况与创伤得到一一呈现,纳粹施害者的身份在根本恶与平庸之恶之间呈现出多维面向,莱维在多部小说中深入探究与批判了纳粹施害者暴力行径背后德意志帝国极权主义之恶与人性本恶。
作为知识分子与人文者,莱维在仇恨、理智与反思中对施害者实现了宽恕的难能之能。
关键词:普里莫•莱维;施害者;根本恶;平庸之恶;暴力基金项目:第61批中国博士后科学基金资助项目“文学如何触摸历史”(编号2017M611766)和中国博士后科学基金第11批特别资助项目“再现的可能与虚构的限度”(编号2018T110472)阶段性成果。
作者简介:黄文凯,广西大学文学院副教授,南京大屠杀史与国际和平研究院研究员,主要从事于中西大屠杀文学研究。
谢雨君,广西大学硕士研究生,主要从事欧美文学研究。
Title: Radical Evil Or The Banality of Evil of Auschwitz: A Study on Perpetrators in Levi’s WritingsAbstract: Italian author Primo Levi is the witness and writer of Auschwitz. With calm and objective writing, his works witnessed the inhumane slavery and slaughter of Nazi, as well as traumas and conditions of “prisons”. Especially, the identity of perpetrators in his writing demonstrated the multi-dimensional orientations between Radical Evil and the Banality of Evil. Furthermore, Levi probed and criticized the evil of Nazi Germany and human nature behind Nazi’s violence. As an intellectual and humanist, Levi thought and criticized the evil of perpetrators all round, and with hatred, reason and reflection, he contrived to forgive perpetrators.Key words: Primo Levi; perpetrators; radical evil; the banality of evil; violenceAuthor: Huang Wenkai is associate professor at School of Liberal Arts, Guangxi University (Nanning 530004, China). His research focuses on Chinese and Western Holocaust Literature. E-mail:*************.Xie Yujun is postgraduate student at Guangxi University (Nanning 530004, China), whose major research interest is Euro-American literature.49黄文凯、谢雨君:奥斯维辛的根本恶或平庸之恶——普里莫•莱维作品中的施害者分析犹太裔意大利作家普里莫•莱维凭借其对大屠杀具有适度节制的客观性叙事与带有文学性的理性记录,在世界文坛上享有盛誉。
中国博士后科学基金概述一、基金的性质和特点在李政道先生倡议下,由邓小平同志决策,国家于1985年创建中国博士后科学基金。
《国务院批转国家科委、教育部、中国科学院关于试办博士后科研流动站报告的通知》(国发[1985]88号)中明确规定:“设立博士后科学基金,主要用以鼓励和支持博士后研究人员中有科研潜力和杰出才能的年轻优秀人才,使他们在某些方面得到优厚的条件,以便顺利开展科研工作,迅速成长为高水平的研究人才。
”随着我国博士后事业的不断发展和完善,中国博士后科学基金也获得了长足的发展和进步。
在现阶段,中国博士后科学基金主要用于资助具有创新能力和发展潜力的优秀博士后研究人员,促使他们在科研工作中完成创新研究,并迅速成长为适应社会主义现代化建设需要的各类复合型、战略型和创新型人才。
基金资助经费主要来源于中央财政拨款,列入中央财政年度预算;同时接受国内外各种机构、团体、单位或个人的捐赠。
鼓励各地区、各部门、各设站单位予以配套资助。
(《关于印发〈中国博士后科学基金资助规定〉的通知》中博基字[2008]1号)与其他基金相比,中国博士后科学基金具有以下三个鲜明的特点:一是坚持对“人”的资助,通过项目考察“人”的创新能力和创新潜力,体现“人才优先”的资助理念。
二是博士后科学基金是专门针对博士后人员的“种子”基金。
其他基金由于主要用于资助研究项目,因而在完成时间、项目跟踪等方面有一定的限制,博士后在站两年很难申请到。
博士后科学基金是博士后得到的第一笔可以自己自由支配使用的科研经费,额度虽然不大,但对支持博士后开展原创性的科研工作起到了至关重要的作用,投入低、回报高。
三是基金的激励和导向作用明显。
许多单位和部门把获得博士后基金资助的情况纳入本单位和部门的评估考核指标,有的甚至把获得博士后科学基金资助作为博士后出站留校工作、职称晋升、科研经费配套、确定重点培养对象等的一个重要条件。
省市和部门每年的配套投入,远远超过了基金本身的投入,博士后科学基金在引导地方部门和设站单位加大投入方面起到了很好的辐射和带动作用,。
关于公布我校获第62批中国博士后科学基金面上资助人员名单的通知根据中博基字(2017)12号文件的通知,我校获第62批中国博士后科学基金面上资助人员名单如下:资助编号姓名博管会编号资助等级2017M620198 王国强182537 12017M620199 耿金军190370 12017M620200 彭冲181418 12017M620201 胡镕194375 12017M620202 陈克192090 12017M620203 郝松187816 12017M620204 徐秀梅189077 12017M620205 黄震194536 12017M620206 刘苏176264 12017M620207 檀菲菲177260 12017M620208 吴少微173371 12017M621684 陈东182777 22017M621685 郑丹青182529 22017M621686 李春凯179733 22017M621687 肖进189262 22017M621688 袁周敏187809 22017M621689 刘喜涛185034 2 2017M621690 高炜186378 2 2017M621691 王瑞雪183300 2 2017M621692 王德波186382 2 2017M621693 谷平176239 2 2017M621694 宋荣斌192088 2 2017M621695 王晖190717 2 2017M621696 徐华金193041 2 2017M621697 钟伟186086 2 2017M621698 张乾180555 2 2017M621699 王春辉181420 2 2017M621700 李骞183306 2 2017M621701 徐尧192099 22017M621702 施春华193025 22017M621703 高磊194051 22017M621704 李少林190715 22017M621705 习新强181966 22017M621706 鞠君毅173873 22017M621707 宋虎成179709 22017M621708 杨勇177254 22017M621709 封雷19153622017M621710 郭瑜180563 22017M621711 张鹏展181417 22017M621712 王天宇188725 22017M621713 刘佳176255 22017M621714 申明锐185975 22017M621715 施珊珊180567 22017M621716 陈德良184445 22017M621717 张传磊177266 22017M621718 李文涛186082 22017M621719 凌晨176263 22017M621720 陈桐185769 22017M621721 刘雯176261 22017M621722 刘名190103 22017M621723 张博172209 22017M621724 刘云志182545 22017M621725 瞿皎姣171195 22017M621726 丁翔17119722017M621727 刘金发179726 22017M621728 张笑夷1850422特此通知。
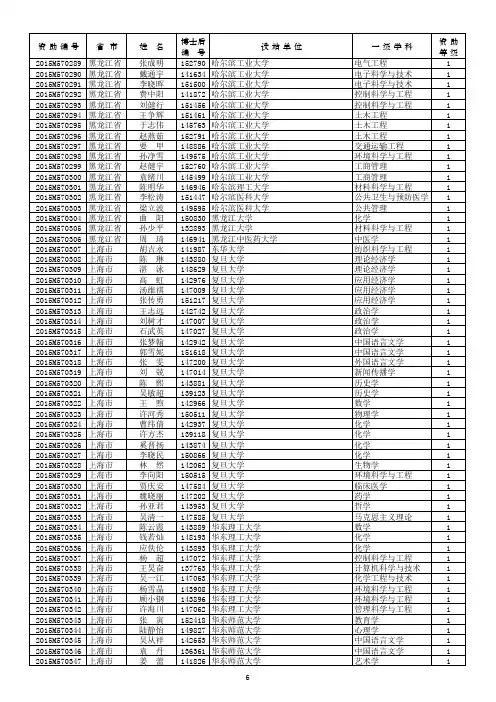
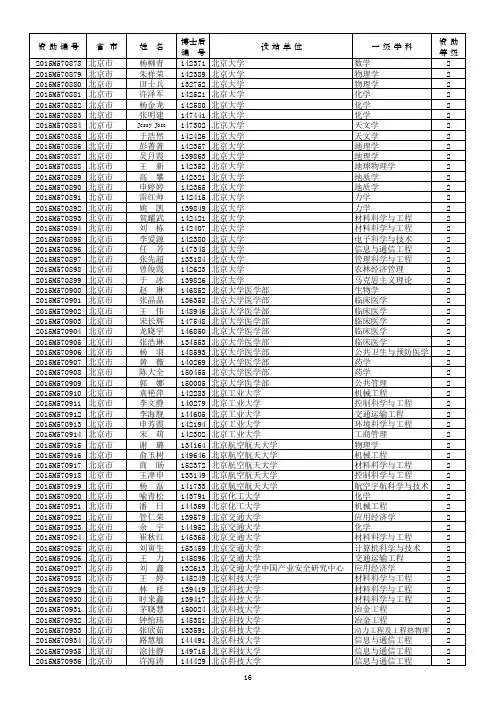

中国博士后科学基金第59批面上资助获资助人员名单(军队系统获资助人员名单略)资助编号省市姓名博士后编号设站单位一级学科资助等级2016M590001北京市李波154299北京大学理论经济学一等2016M590002北京市黄林162878北京大学应用经济学一等2016M590003北京市单丽卿157261北京大学社会学一等2016M590004北京市云春凤162881北京大学社会学一等2016M590005北京市高耀157703北京大学教育学一等2016M590006北京市何东军157393北京大学心理学一等2016M590007北京市孟玲157269北京大学外国语言文学一等2016M590008北京市谢华生162917北京大学物理学一等2016M590009北京市陈杰安163029北京大学化学一等2016M590010北京市陈旭东157398北京大学化学一等2016M590011北京市田慧慧157376北京大学化学一等2016M590012北京市Alexander Kolodzig162939北京大学天文学一等2016M590013北京市Smitha SubramanianHari Sharma162934北京大学天文学一等2016M590014北京市陈丙秋162911北京大学天文学一等2016M590015北京市杨海琳157287北京大学海洋科学一等2016M590016北京市于祥江157307北京大学地质学一等2016M590017北京市Yi Tu147375北京大学生物学一等2016M590018北京市王青154298北京大学电子科学与技术一等2016M590019北京市蒋卓人162970北京大学计算机科学与技术一等2016M590020北京市祝闯157349北京大学计算机科学与技术一等2016M590021北京市廖勤拙162863北京大学石油与天然气工程一等2016M590022北京市闫才青157237北京大学环境科学与工程一等2016M590023北京市张伟162929北京大学农业资源利用一等2016M590024北京市何益鑫166038北京大学哲学一等2016M590025北京市程锦162588北京大学医学部临床医学一等2016M590026北京市范光森155970北京工商大学食品科学与工程一等2016M590027北京市刘博169161北京工业大学计算机科学与技术一等2016M590028北京市王蕾146966北京航空航天大学物理学一等2016M590029北京市高洋168283北京航空航天大学材料科学与工程一等2016M590030北京市杜时佳159357北京航空航天大学控制科学与工程一等2016M590031北京市孙亮163971北京航空航天大学控制科学与工程一等2016M590032北京市林恒福162200北京计算科学研究中心物理学一等2016M590033北京市彭枫159567北京计算科学研究中心物理学一等2016M590034北京市王达161304北京计算科学研究中心物理学一等2016M590035北京市郑晓军153777北京计算科学研究中心物理学一等2016M590036北京市聂金哲166715北京建筑大学土木工程一等2016M590037北京市梁熠宇158638北京交通大学数学一等2016M590038北京市邓涛157747北京交通大学电子科学与技术一等2016M590039北京市赵晓军155888北京交通大学信息与通信工程一等2016M590040北京市李丹勇162841北京交通大学控制科学与工程一等2016M590041北京市王玉青165082北京交通大学管理科学与工程一等2016M590042北京市徐冬155481北京科技大学机械工程一等2016M590043北京市张静言153975北京科技大学材料科学与工程一等2016M590044北京市朱立峰158151北京科技大学材料科学与工程一等2016M590045北京市朱骏160293北京科技大学冶金工程一等2016M590046北京市张娜155989北京科技大学冶金工程一等2016M590047北京市陈媛155028北京科技大学信息与通信工程一等2016M590048北京市王卫苹159411北京科技大学计算机科学与技术一等2016M590049北京市郑瑾157333北京科技大学环境科学与工程一等2016M590050北京市崔强168402北京理工大学管理科学与工程一等2016M590051北京市张汉鹏168411北京理工大学管理科学与工程一等2016M590052北京市赵伟刚158423北京理工大学管理科学与工程一等2016M590053北京市王艳160567北京绿色印刷包装产业技术研究院有限公司新闻传播学一等2016M590054北京市李廷洲165439北京师范大学教育学一等2016M590055北京市许珊164288北京师范大学心理学一等2016M590056北京市郭晨光163632北京师范大学中国语言文学一等2016M590057北京市曹梦雪161977北京师范大学中国语言文学一等2016M590058北京市陈鹏忠160709北京师范大学化学一等2016M590059北京市夏江周160543北京师范大学地理学一等2016M590060北京市刘玲168776北京师范大学哲学一等2016M590061北京市范杰164680北京师范大学哲学一等2016M590062北京市杨浩163336北京市农林科学院地理学一等2016M590063北京市段续伟160331北京市农林科学院园艺学一等2016M590064北京市赵连梅156200北京协和医学院临床医学一等2016M590065北京市李春雨160340北京协和医学院中药学一等2016M590066北京市于承新165094北京应用物理与计算数学研究所物理学一等2016M590067北京市戴键150040北京邮电大学电子科学与技术一等2016M590068北京市潘恬159407北京邮电大学计算机科学与技术一等2016M590069北京市赵颖166302财政部财政科学研究所应用经济学一等2016M590070北京市蒋涛150131国家纳米科学中心材料科学与工程一等2016M590071北京市李国梁167591国家食品安全风险评估中心食品科学与工程一等2016M590072北京市彭子欣152102国家食品安全风险评估中心公共卫生与预防医学一等2016M590073北京市袁国红166499国家卫生计生委科学技术研究所生物医学工程一等2016M590074北京市荆莹莹160202国家卫星气象中心地理学一等2016M590075北京市许建明162387清华大学理论经济学一等2016M590076北京市许家云167846清华大学应用经济学一等2016M590077北京市王锦阳163769清华大学应用经济学一等2016M590078北京市刘卫柏167493清华大学应用经济学一等2016M590079北京市刘畅156368清华大学法学一等2016M590080北京市王杨148221清华大学社会学一等2016M590081北京市牛冬163779清华大学社会学一等2016M590082北京市严忠波162375清华大学物理学一等2016M590083北京市李凤159108清华大学化学一等2016M590084北京市方晓峰154716清华大学生物学一等2016M590085北京市安浩然157799清华大学生物学一等2016M590086北京市陈祥军158358清华大学生物学一等2016M590087北京市王乐乐151957清华大学生物学一等2016M590088北京市熊团林159582清华大学生物学一等2016M590089北京市徐利玲153079清华大学生物学一等2016M590090北京市王珊159149清华大学生物学一等2016M590091北京市任杰167847清华大学力学一等2016M590092北京市孟庆华158447清华大学力学一等2016M590093北京市张亮165130清华大学力学一等2016M590094北京市杨超167842清华大学机械工程一等2016M590095北京市银了飞165098清华大学动力工程及工程热物理一等2016M590096北京市付学谦156457清华大学电气工程一等2016M590097北京市孙皓158448清华大学电子科学与技术一等2016M590098北京市邓晓娇167822清华大学控制科学与工程一等2016M590099北京市董春玲160161清华大学计算机科学与技术一等2016M590100北京市陆玉武163771清华大学计算机科学与技术一等2016M590101北京市张力智146713清华大学建筑学一等2016M590102北京市王本锋168397清华大学地质资源与地质工程一等2016M590103北京市叶长青155600清华大学核科学与技术一等2016M590104北京市王程153857清华大学环境科学与工程一等2016M590105北京市白雪152152清华大学基础医学一等2016M590106北京市别建波158457清华大学药学一等2016M590107北京市李天磊154759清华大学药学一等2016M590108北京市康飞146676清华大学工商管理一等2016M590109北京市叶冉150650清华大学工商管理一等2016M590110北京市南方163777清华大学公共管理一等2016M590111北京市叶然151952清华大学哲学一等2016M590112北京市田志光163083首都师范大学历史学一等2016M590113北京市张勇163490首都师范大学历史学一等2016M590114北京市白会敏155792首都医科大学临床医学一等2016M590115北京市靳呈伟164038中共中央党校政治学一等2016M590116北京市杨靖旼157847中共中央马克思恩格斯列宁斯大林著作编译局政治学一等2016M590117北京市张春晓163566中国地质大学(北京)地理学一等2016M590118北京市王萌153352中国地质大学(北京)地质资源与地质工程一等2016M590119北京市柴鹏160295中国地质科学院地质学一等2016M590120北京市黄柏翔154952中国光大(集团)总公司应用经济学一等2016M590121北京市陳菟汶161671中国疾病预防控制中心基础医学一等2016M590122北京市陈巨辉157678中国舰船研究院船舶与海洋工程一等2016M590123北京市胡彩云161829中国教育科学研究院教育学一等2016M590124北京市许海云166533中国科学技术信息研究所图书馆、情报与档案管理一等2016M590125北京市于琦163610中国科学技术信息研究所图书馆、情报与档案管理一等2016M590126北京市郭翀晔149363中国科学院北京基因组研究所生物学一等2016M590127北京市高涛166627中国科学院大气物理研究所大气科学一等2016M590128北京市韩伟伟155887中国科学院大学管理科学与工程一等2016M590129北京市罗春林166385中国科学院大学管理科学与工程一等2016M590130北京市冯应斌168394中国科学院地理科学与资源研究所地理学一等2016M590131北京市邢慧斌169076中国科学院地理科学与资源研究所地理学一等2016M590132北京市刘双163655中国科学院地质与地球物理研究所地质资源与地质工程一等2016M590133北京市黄发朋157098中国科学院高能物理研究所物理学一等2016M590134北京市章颖理149254中国科学院国家天文台物理学一等2016M590135北京市闵巍庆160335中国科学院计算技术研究所计算机科学与技术一等2016M590136北京市李刚168201中国科学院科技政策与管理科学研究所应用经济学一等2016M590137北京市王磊156910中国科学院理化技术研究所材料科学与工程一等2016M590138北京市曾晓雄159873中国科学院理论物理研究所物理学一等2016M590139北京市韩存博169069中国科学院青藏高原研究所地理学一等2016M590140北京市沈亮169195中国科学院青藏高原研究所地理学一等2016M590141北京市王传飞162047中国科学院青藏高原研究所地理学一等2016M590142北京市王明达162060中国科学院青藏高原研究所地质学一等2016M590143北京市夏西超156498中国科学院生态环境研究中心环境科学与工程一等2016M590144北京市卫瑞158599中国科学院数学与系统科学研究院应用经济学一等2016M590145北京市李利平160136中国科学院数学与系统科学研究院数学一等2016M590146北京市吕博强149685中国科学院数学与系统科学研究院数学一等2016M590147北京市Sadia Arshad163669中国科学院数学与系统科学研究院数学一等2016M590148北京市侯志鹏158488中国科学院物理研究所材料科学与工程一等2016M590149北京市刘正佳160135中国科学院遥感与数字地球研究所地理学一等2016M590150北京市王琦169813中国矿业大学(北京)土木工程一等2016M590151北京市杨永康154531中国矿业大学(北京)矿业工程一等2016M590152北京市余敏161667中国林业科学研究院林业工程一等2016M590153北京市欧阳芳群160132中国林业科学研究院林学一等2016M590154北京市彭建146445中国旅游研究院工商管理一等2016M590155北京市温博婷158765中国农业大学作物学一等2016M590156北京市郭卫卫162912中国农业大学作物学一等2016M590157北京市张美玲158739中国农业大学园艺学一等2016M590158北京市王学霞157148中国农业科学院生物学一等2016M590159北京市尹福斌157742中国农业科学院农业工程一等2016M590160北京市孟丽君157014中国农业科学院作物学一等2016M590161北京市钟雄辉161415中国农业科学院植物保护一等2016M590162北京市李玉艳161494中国农业科学院植物保护一等2016M590163北京市董利锋161559中国农业科学院畜牧学一等2016M590164北京市王晓君163561中国农业科学院农林经济管理一等2016M590165北京市王兴旺159935中国农业银行农林经济管理一等2016M590166北京市王敏仲164283中国气象科学研究院大气科学一等2016M590167北京市胡夏枫159874中国人民大学法学一等2016M590168北京市柳亦博159875中国人民大学公共管理一等2016M590169北京市张苗苗158778中国人民大学马克思主义理论一等2016M590170北京市苏乃芳160733中国人民银行金融研究所应用经济学一等2016M590171北京市陈菁泉166617中国社会科学院理论经济学一等2016M590172北京市刘维刚163116中国社会科学院应用经济学一等2016M590173北京市李文杰160600中国社会科学院法学一等2016M590174北京市马金星163119中国社会科学院法学一等2016M590175北京市史谢虹150137中国社会科学院政治学一等2016M590176北京市赵永胜164304中国社会科学院民族学一等2016M590177北京市熊贤品161184中国社会科学院历史学一等2016M590178北京市韩策161178中国社会科学院历史学一等2016M590179北京市竭长光166548中国社会科学院马克思主义理论一等2016M590180北京市史为磊161186中国社会科学院马克思主义理论一等2016M590181北京市申惠文161530中国应用法学研究所法学一等2016M590182北京市焦海涛158791中国政法大学法学一等2016M590183北京市胡晓玲158820中国政法大学法学一等2016M590184北京市杨耀武166891中国证券监督管理委员会理论经济学一等2016M590185北京市俞裕天165474中国中医科学院中医学一等2016M590186北京市吉海杰162137中国中医科学院中医学一等2016M590187北京市周庆兵151157中国中医科学院中医学一等2016M590188北京市李四维165582中国中医科学院中西医结合一等2016M590189北京市丁霞150905中国中医科学院中西医结合一等2016M590190天津市赵曼161058国家海洋局天津海水淡化与综合利化学一等用研究所2016M590191天津市李浩166001河北工业大学化学工程与技术一等2016M590192天津市黎峰161147南开大学应用经济学一等2016M590193天津市张洪松155451南开大学政治学一等2016M590194天津市黄一166109南开大学中国语言文学一等2016M590195天津市景旭164815南开大学化学一等2016M590196天津市戚慕杰154386南开大学生物学一等2016M590197天津市朱美峰158761南开大学生物医学工程一等2016M590198天津市何程智167556天津大学化学一等2016M590199天津市赵迎新168796天津大学力学一等2016M590200天津市王双160537天津大学光学工程一等2016M590201天津市潘家营167465天津大学动力工程及工程热物理一等2016M590202天津市余玉洁168872天津大学土木工程一等2016M590203天津市廖青虎156234天津大学公共管理一等2016M590204天津市张鹏158673天津工业大学化学工程与技术一等2016M590205天津市汤尧168191天津捷盛东辉保鲜科技有限公司食品科学与工程一等2016M590206天津市汪强150828天津理工大学化学一等2016M590207天津市孙卫华165310天津师范大学政治学一等2016M590208天津市陈研158669天津医科大学生物医学工程一等2016M590209天津市宋燕妮154103天津医科大学临床医学一等2016M590210天津市房中则153796天津医科大学药学一等2016M590211河北省孙建亮165316燕山大学机械工程一等2016M590212河北省赵延治152751燕山大学机械工程一等2016M590213河北省杨春江167980燕山大学工商管理一等2016M590214山西省刘和平163586太原理工大学材料科学与工程一等2016M590215山西省刘汉涛166360中北大学动力工程及工程热物理一等2016M590216山西省任鹏举160710中国科学院山西煤炭化学研究所化学一等2016M590217辽宁省王林会150313大连汉信生物制药有限公司临床医学一等2016M590218辽宁省王洪雁150315大连经济技术开发区计算机科学与技术一等2016M590219辽宁省吴锋156116大连理工大学力学一等2016M590220辽宁省蒋玲莉165246大连理工大学机械工程一等2016M590221辽宁省王鹏168311大连理工大学动力工程及工程热物理一等2016M590222辽宁省杨洛鹏161313大连理工大学动力工程及工程热物理一等2016M590223辽宁省张学155348大连理工大学土木工程一等2016M590224辽宁省毕春伟169603大连理工大学水利工程一等2016M590225辽宁省刘本希161853大连理工大学水利工程一等2016M590226辽宁省张胜166760大连理工大学化学工程与技术一等2016M590227辽宁省赵宇哲153787大连理工大学管理科学与工程一等2016M590228辽宁省刘锋156105东北财经大学工商管理一等2016M590229辽宁省于忠亮165168东北大学机械工程一等2016M590230辽宁省李永立166466东北大学管理科学与工程一等2016M590231辽宁省于萍165603辽宁大学哲学一等2016M590232辽宁省高宁150256辽宁大学马克思主义理论一等2016M590233辽宁省李莹莹165591辽宁师范大学生物学一等2016M590234辽宁省赵运弢161429沈阳理工大学科技开发总公司兵器科学与技术一等2016M590235辽宁省徐璐148004沈阳药科大学药学一等2016M590236辽宁省Arindam Modak164953中国科学院大连化学物理研究所化学一等2016M590237辽宁省马伟光156099中国科学院大连化学物理研究所化学一等2016M590238辽宁省郑琼164951中国科学院大连化学物理研究所化学工程与技术一等2016M590239辽宁省汪文龙166997中国科学院大连化学物理研究所化学工程与技术一等2016M590240辽宁省包义君155353中国医科大学临床医学一等2016M590241吉林省谭笑晗158910东北师范大学艺术学一等2016M590242吉林省谭海军166131东北师范大学数学一等2016M590243吉林省季春燕168095东北师范大学数学一等2016M590244吉林省丁艳玲163508东北师范大学地理学一等2016M590245吉林省王铭147987东北师范大学地理学一等2016M590246吉林省钟志伟169328东北师范大学生物学一等2016M590247吉林省周帮伟161743东北师范大学畜牧学一等2016M590248吉林省刘志167052东北师范大学马克思主义理论一等2016M590249吉林省吴勇民152720吉林大学应用经济学一等2016M590250吉林省王树森155930吉林大学中国语言文学一等2016M590251吉林省胡卫军156789吉林大学艺术学一等2016M590252吉林省成璟瑭164558吉林大学历史学一等2016M590253吉林省房文汇156782吉林大学物理学一等2016M590254吉林省李慧168849吉林大学化学一等2016M590255吉林省刘维163815吉林大学地球物理学一等2016M590256吉林省于征磊151190吉林大学机械工程一等2016M590257吉林省李学飞163808吉林大学机械工程一等2016M590258吉林省易晓峰152736吉林大学仪器科学与技术一等2016M590259吉林省王雷156777吉林大学电子科学与技术一等2016M590260吉林省郑明163810吉林大学计算机科学与技术一等2016M590261吉林省刘春宝146841吉林大学农业工程一等2016M590262吉林省罗丹158688吉林大学农业工程一等2016M590263吉林省孙允陆168828吉林大学生物医学工程一等2016M590264吉林省刘艳164552吉林大学基础医学一等2016M590265吉林省慈鑫鑫168847吉林大学临床医学一等2016M590266吉林省姜成山154677延边大学历史学一等2016M590267吉林省李赛男159201中国科学院长春应用化学研究所化学一等2016M590268吉林省褚雯婷147964中国科学院长春应用化学研究所化学一等2016M590269吉林省朱新玉162069中国科学院东北地理与农业生态研究所地理学一等2016M590270黑龙江省李源作151478东北林业大学物理学一等2016M590271黑龙江省刘志理166855东北林业大学生物学一等2016M590272黑龙江省卜媛媛152816东北林业大学生物学一等2016M590273黑龙江省李春伟156485东北林业大学林业工程一等2016M590274黑龙江省柏明星161261东北石油大学石油与天然气工程一等2016M590275黑龙江省吕建福151831哈尔滨工程大学土木工程一等2016M590276黑龙江省胡玉真149581哈尔滨工程大学管理科学与工程一等2016M590277黑龙江省侯磊164104哈尔滨工业大学力学一等2016M590278黑龙江省刘秦160748哈尔滨工业大学材料科学与工程一等2016M590279黑龙江省卢松涛168444哈尔滨工业大学材料科学与工程一等2016M590280黑龙江省杨文澍166864哈尔滨工业大学材料科学与工程一等2016M590281黑龙江省孟凡刚168442哈尔滨工业大学电气工程一等2016M590282黑龙江省赵飞165287哈尔滨工业大学电气工程一等2016M590283黑龙江省赵悦151453哈尔滨工业大学控制科学与工程一等2016M590284黑龙江省刘显敏157822哈尔滨工业大学计算机科学与技术一等2016M590285黑龙江省郑来155120哈尔滨工业大学交通运输工程一等2016M590286黑龙江省吴志光165712哈尔滨工业大学生物医学工程一等2016M590287黑龙江省蒋晶晶164120哈尔滨工业大学管理科学与工程一等2016M590288黑龙江省王永亮160781哈尔滨理工大学材料科学与工程一等2016M590289黑龙江省孙旸163432哈尔滨师范大学马克思主义理论一等2016M590290黑龙江省杨磊155859哈尔滨医科大学生物学一等2016M590291黑龙江省程亮160762哈尔滨医科大学计算机科学与技术一等2016M590292黑龙江省梁英健167189哈尔滨医科大学临床医学一等2016M590293黑龙江省王洪军147857哈尔滨医科大学临床医学一等2016M590294黑龙江省关静166886哈尔滨医科大学临床医学一等2016M590295黑龙江省吴明明165812哈尔滨医科大学药学一等2016M590296黑龙江省李叶147793哈尔滨医科大学公共管理一等2016M590297黑龙江省张华152522黑龙江八一农垦大学生物学一等2016M590298黑龙江省于水澜146943黑龙江中医药大学中医学一等2016M590299上海市王富军152507东华大学纺织科学与工程一等2016M590300上海市汪莉157970复旦大学应用经济学一等2016M590301上海市张飞152591复旦大学应用经济学一等2016M590302上海市周兵160693复旦大学应用经济学一等2016M590303上海市李恒154666复旦大学法学一等2016M590304上海市薛小荣168358复旦大学政治学一等2016M590305上海市王贞威157968复旦大学政治学一等2016M590306上海市邓惟佳166659复旦大学社会学一等2016M590307上海市赵建成159979复旦大学中国语言文学一等2016M590308上海市戴路159644复旦大学中国语言文学一等2016M590309上海市陶磊158521复旦大学中国语言文学一等2016M590310上海市胡栓155866复旦大学新闻传播学一等2016M590311上海市贾金红159978复旦大学数学一等2016M590312上海市Koichi Hattori165144复旦大学物理学一等2016M590313上海市李宇慧155530复旦大学化学一等2016M590314上海市宋泽婷157955复旦大学生物学一等2016M590315上海市兰志春167969复旦大学生物学一等2016M590316上海市龚玲162678复旦大学生物学一等2016M590317上海市周翔宇154392复旦大学生物学一等2016M590318上海市金云霞162665复旦大学材料科学与工程一等2016M590319上海市罗轶凤161917复旦大学计算机科学与技术一等2016M590320上海市李涛165143复旦大学建筑学一等2016M590321上海市燕姝雯158484复旦大学环境科学与工程一等2016M590322上海市郑秀珍154861复旦大学环境科学与工程一等2016M590323上海市安磊157987复旦大学基础医学一等2016M590324上海市黄丽素165141复旦大学临床医学一等2016M590325上海市赵岩157963复旦大学公共卫生与预防医学一等2016M590326上海市杨君161846华东理工大学社会学一等2016M590327上海市陈显军169007华东理工大学生物学一等2016M590328上海市夏启能169005华东理工大学化学工程与技术一等2016M590329上海市叶振君156999华东理工大学植物保护一等2016M590330上海市王一集164080华东师范大学心理学一等2016M590331上海市孟国正146425华东师范大学体育学一等2016M590332上海市杨骥154167华东师范大学中国语言文学一等2016M590333上海市王西强154173华东师范大学中国语言文学一等2016M590334上海市李柯160180华东师范大学艺术学一等2016M590335上海市李慧聪159065华东师范大学数学一等2016M590336上海市邓晶晶166564华东师范大学化学一等2016M590337上海市严骏驰164710华东师范大学计算机科学与技术一等2016M590338上海市李娜158468华东政法大学法学一等2016M590339上海市于波155940华东政法大学法学一等2016M590340上海市郭武153613华东政法大学法学一等2016M590341上海市王永杰161513华东政法大学法学一等2016M590342上海市张海147541华东政法大学社会学一等2016M590343上海市许敏149442上海财经大学公共管理一等2016M590344上海市薛俊强167784上海财经大学哲学一等2016M590345上海市张峰157396上海财经大学马克思主义理论一等2016M590346上海市杨喜美166381上海大学数学一等2016M590347上海市贺耀龙154393上海大学力学一等2016M590348上海市郭一明150335上海海事大学地理学一等2016M590349上海市徐艳丽152547上海海事大学信息与通信工程一等2016M590350上海市孙俊秀168709上海交通大学应用经济学一等2016M590351上海市洪毅164621上海交通大学应用经济学一等2016M590352上海市Olli Matias Tikkanen154222上海交通大学体育学一等2016M590353上海市胡俊150577上海交通大学中国语言文学一等2016M590354上海市Ajmal Khan159528上海交通大学化学一等2016M590355上海市侯四化165188上海交通大学化学一等2016M590356上海市沈乾164159上海交通大学生物学一等2016M590357上海市黄婷婷156215上海交通大学生物学一等2016M590358上海市朱耿167520上海交通大学生物学一等2016M590359上海市Yu Jin Kim163243上海交通大学生物学一等2016M590360上海市王曰英159542上海交通大学控制科学与工程一等2016M590361上海市何凤兰151655上海交通大学船舶与海洋工程一等2016M590362上海市冯海玮157514上海交通大学环境科学与工程一等2016M590363上海市黄寿强156826上海交通大学环境科学与工程一等2016M590364上海市孙珠峰154991上海交通大学公共管理一等2016M590365上海市侯嘉杰164363上海交通大学医学院临床医学一等2016M590366上海市林淑贤153604上海交通大学医学院口腔医学一等2016M590367上海市郦珊161919上海科技馆生物学一等2016M590368上海市毛琳164378上海理工大学材料科学与工程一等2016M590369上海市张孙杰156402上海理工大学控制科学与工程一等2016M590370上海市余开亮162068上海社会科学院理论经济学一等2016M590371上海市于秋阳163863上海社会科学院应用经济学一等2016M590372上海市李海江158643上海师范大学心理学一等2016M590373上海市刘峥154805上海体育学院体育学一等2016M590374上海市张放169335上海外国语大学政治学一等2016M590375上海市杜力159893上海外国语大学中国语言文学一等2016M590376上海市赵岩159892上海外国语大学外国语言文学一等2016M590377上海市纪秀明169332上海外国语大学外国语言文学一等2016M590378上海市苏毅苗160250上海音乐学院艺术学一等2016M590379上海市付鹏162662上海证券交易所应用经济学一等2016M590380上海市韦璐瑶157463上海中医药大学生物学一等2016M590381上海市王志鹏162830同济大学机械工程一等2016M590382上海市姚行友152486同济大学土木工程一等2016M590383上海市栗现文147151同济大学农业工程一等2016M590384上海市段妮娜154637同济大学环境科学与工程一等。
2017 年获批国家自然科学基金资助项目序号项目批准负责人号1 31725003 沈锡辉2 81703193 吕英华3 41701291 舒敦涛4 31700191 王辉5 31700313 johannes Liesche6 31701419 马猛7 31701421 曾庆东8 31770121 张磊9 31770200 赵亮10 31770204 陈坤明11 31770205 刘夏燕12 31770207 陈少林13 31770289 王存14 31770291 谢长根15 31770345 邵景侠16 31770648 龚春梅项目名称微生物环境适应机制六价铬影响小鼠精原干细胞存活的表观调控作用机制氮营养策略对大豆根际微域氮转化过程的影响及作用机制二型叶棘豆种内单复叶型多态性的演化研究新显微成像技术在干旱诱导的细胞壁重塑中的应用小麦新基因 TaCYP78A16 在根系发育中的功能研究小麦条锈病和赤霉病抗源 Centrum 抗病基因精细定位和应用西北荒漠耐旱植物骆驼刺内生菌Pantoea alhagi LTYR-11Z 提高小麦抗旱性的机理研究广义李属(蔷薇科)的系统发育及花序和花器官的演化规律研究过氧化物酶体定位的NAD激酶TaNADK4 参与小麦干旱应答的分子调控机制拟南芥微管结合蛋白Long Seed1调控种子大小的分子机制研究拟南芥 CESA 的磷酸化修饰调控细胞伸长生长的分子机制光和 CO2 调控气孔运动的交叉互作机理SnRK2在SnRK3调控下通过调节质膜 H+-ATPase抵御渗透胁迫的机理研究拟南芥 B3 家族转录因子ABS2 调控花瓣发育的机理研究HD-Zip III 和木质素在柠条叶脉响应干旱向木质部分化及促导管成熟作用解析批准申请代码 1 项目类别金额开始日期结题日期(万元)国家杰出C0105 青年科学350 2018/1/1 2022/12/31基金H2601青年科学20 2018/1/1 2020/12/31基金项目D010504青年科学26 2018/1/1 2020/12/31基金项目C020303青年科学24 2018/1/1 2020/12/31基金项目C0207青年科学19 2018/1/1 2020/12/31基金项目C130402青年科学27 2018/1/1 2020/12/31基金项目C130402青年科学26 2018/1/1 2020/12/31基金项目C010501 面上项目60 2018/1/1 2021/12/31C020101 面上项目60 2018/1/1 2021/12/31C020101 面上项目60 2018/1/1 2021/12/31C020101 面上项目60 2018/1/1 2021/12/31C020101 面上项目60 2018/1/1 2021/12/31C020406 面上项目60 2018/1/1 2021/12/31C020406 面上项目60 2018/1/1 2021/12/31C020502 面上项目60 2018/1/1 2021/12/31C160502 面上项目61 2018/1/1 2021/12/311731771474陶士珩1831771699江元清1931772403刘华伟2041771296陈春2161772431廖明帜2231741010齐亚飞翻译过程中核糖体对 mRNA 结构动C060703 面上项目51 2018/1/1 2021/12/31 态变化的影响及可视化实现甘蓝型油菜中两个互作 NAC 转录因子调控活性氧、叶片衰老以及抗逆的C1302 面上项目56 2018/1/1 2021/12/31 分子机理研究水稻基因组 CRISPRa 系统的建立及C150705 面上项目60 2018/1/1 2021/12/31 SYM 共生通路的激活研究苜蓿根际土壤微生物群落及其与宿主互作对纳米氧化锌环境转化过程D010504 面上项目63 2018/1/1 2021/12/31 的响应哺乳动物配子发生基因动态网络的F020504 面上项目61 2018/1/1 2021/12/31 精准构建与演化分析NTC 复合体调控叶绿体发育分子机C020401 应急管理15 2018/1/1 2018/12/31 制的研究。
第43卷第11期自动化学报Vol.43,No.11 2017年11月ACTA AUTOMATICA SINICA November,2017基于无模型自适应控制的无人驾驶汽车横向控制方法田涛涛1侯忠生1刘世达1邓志东2摘要提出了一种基于无模型自适应控制的无人驾驶汽车横向控制方案.首先,将无人驾驶汽车循迹跟踪控制问题转化成预瞄偏差角跟踪问题,然后基于无人驾驶汽车横向控制系统的动态线性化数据模型,设计出无模型自适应控制算法、伪梯度估计算法和伪梯度重置算法,进而实现了自主车辆的无人驾驶.该方法的实现仅用到无人驾驶汽车运行时的输入输出数据,避免了对无人驾驶汽车进行复杂机理建模的难题,对于复杂的无人驾驶汽车运行过程具有很好的自适应性,对不同的无人驾驶车辆具有较强的可移植性.该方案已实际应用于清华大学无人驾驶汽车实验平台,在北京市丰台区的实地测试实验、在江苏省常熟市高速路的测试以及2015年“中国智能车未来挑战赛”的现场应用验证了所提方案的有效性.关键词无模型自适应控制,无人驾驶汽车,横向控制,预瞄偏差角引用格式田涛涛,侯忠生,刘世达,邓志东.基于无模型自适应控制的无人驾驶汽车横向控制方法.自动化学报,2017, 43(11):1931−1940DOI10.16383/j.aas.2017.c160633Model-free Adaptive Control Based Lateral Control of Self-driving Car TIAN Tao-Tao1HOU Zhong-Sheng1LIU Shi-Da1DENG Zhi-Dong2Abstract In this paper,a control scheme based on model free adaptive control is proposed for the lateral control problem of self-driving car.First,the trajectory tracking problem for self-driving car is converted into the stabilization problem concerning a preview-deviation-yaw.Then,the lateral control system of the self-driving car is converted into a virtual dynamical linearization data model via a novel dynamic linearization technique.After that,a model free adaptive control algorithm,and its corresponding pseudo gradient estimating algorithm and pseudo gradient resetting algorithm are designed,such that the automatic drive of the self-driving car can be realized.The implementation of the proposed method only utilizes the input and output data of the self-driving car,avoiding complex modeling of the self-driving car.Thus,it has good adaptability to complex operation processes of self-driving car and is also applicable to other self-driving cars.Furthermore,the proposed scheme is employed in the experimental platform of self-driving car developed by Tsinghua University.Finally,the effectiveness of the proposed method is verified via thefield tests in Fengtai District, Beijing,thefield tests in the freeway of Changshu,Jiangsu,and thefield applications in“2015Chinese Intelligent Car Future Challenge Competition”.Key words Model-free adaptive control(MFAC),self-driving car,lateral control,preview-deviation-yawCitation Tian Tao-Tao,Hou Zhong-Sheng,Liu Shi-Da,Deng Zhi-Dong.Model-free adaptive control based lateral control of self-driving car.Acta Automatica Sinica,2017,43(11):1931−1940近年来,无人驾驶汽车日渐成为汽车研究领域的热点[1−2].由于汽车是一个复杂的非线性系统,且收稿日期2016-09-05录用日期2017-01-05Manuscript received September5,2016;accepted January5, 2017国家自然科学基金(61120106009,61433002,91420106),北京市自然科学基金–交控科技轨道交通联合基金(W17E000020)资助Supported by National Natural Science Foundation of China (61120106009,61433002,91420106),Beijing Natural Science Foundation Joint Fund for Science and Technology Rail Trans-portation(W17E000020)本文责任编委魏庆来Recommended by Associate Editor WEI Qing-Lai1.北京交通大学电子信息工程学院先进控制系统研究所北京1000442.清华大学计算机系,智能技术与系统国家重点实验室,清华信息科学与技术国家实验室(筹)北京1000841.Advanced Control Systems Laboratory,School of Electronic and Information Engineering,Beijing Jiaotong University,Bei-jing1000442.Department of Computer Science,State Key Laboratory of Intelligent Technology and Systems,Tsinghua Na-tional Laboratory for Information Science and Technology,Ts-inghua University,Beijing100084运行于不同的工况下,因此,无人驾驶汽车的循迹跟踪控制问题一直是学术界研究的重点和难点[3].无人驾驶汽车循迹跟踪控制问题包括纵向控制和横向控制两个部分.纵向控制是指对车速的控制,这类控制问题可以归结为对油门或刹车的控制[4];横向控制是指在不同车速和负载等条件下,控制汽车转向使得汽车位置处于期望轨迹中心线处,这类问题可以归结为对方向盘的控制[5−6].相比于纵向控制,横向控制更为重要,原因是横向控制直接决定循迹跟踪的性能,是保障无人驾驶汽车安全和稳定的基础[5],对控制算法要求较高,本文仅就无人驾驶汽车横向控制问题进行研究.针对无人驾驶汽车横向控制问题,文献[6]基于汽车动力学模型设计出了状态反馈控制器,且利用模糊增益规划(Fuzzy gain scheduling,FGS)调节控制器的输出增益,并在TAIWAN i TS-1无人驾驶1932自动化学报43卷汽车平台上进行了验证;文献[7]利用模型预测控制(Model predictive control,MPC)分别就汽车非线性模型和汽车时变线性模型设计了两类控制器,并给出了仿真分析和真车实验结果;文献[8]基于汽车运动学模型设计了参数随车速变化的比例积分微分(Proportional-integral-derivative,PID)控制器,并将该算法应用于Babieca原型车中;文献[9]利用PID控制器作内环较低精度控制器,外环利用模糊控制器做高精度控制,在实际的道路环境中进行了尝试.然而,上述基于模型的方法需要满足相应的假设条件.例如,侧向加速度小于0.4g、车辆的纵向速度为常数、前轮转角直接作为输入等[6],这些假设在实际的无人驾驶汽车运行过程中很难被满足.另外,从理论上分析,除了车辆本身的动力学非线性外,车辆动力学行为与运行速度、道路以及其他天气等因素密切相关,欲想全部精确建立汽车以及环境的动力学模型,然后进行控制系统设计,显然不是可行的方法[5].而采用模糊控制方法,其隶属度函数的确定和专家经验都很难遍历所有工况下的情况,难度大,可应用性差[9].在汽车运行的过程中,会产生大量的输入输出(Input/output,I/O)数据,这些I/O数据包含了车辆的动力学信息,利用数据驱动的方式对无人驾驶汽车进行控制,是目前一个新颖的方法.在数据驱动控制方面,近些年一些典型的数据驱动控制方法相继提出并得到广泛的研究与应用,包括虚拟参考反馈整定[10−11]、自适应动态规划[12−16]、无模型自适应控制[16−17]等.无模型自适应控制(Model-free adaptive con-trol,MFAC)是一种典型的在线数据驱动控制方法[16,18],其原理是在闭环系统的每一个动态工作点处建立一个等价的动态线性化数据模型,然后基于此等价的虚拟数据模型设计控制器,进而实现非线性系统的自适应控制[18].截至目前,MFAC已经得到了广泛的应用,包括广域电力系统[19]、网络延时与丢包问题[20]、多自由度机器人外骨骼控制[21]、交直流微电网[22]以及自动泊车系统[23]等.理论和实践表明,MFAC结构简单、鲁棒性强、便于工程实现,而且MFAC不使用模型的信息,上述由于模型假设带来的不匹配问题可以有效地被避免.本文提出了基于MFAC的无人驾驶汽车横向控制方案,首先将横向控制问题转化为预瞄偏差角(汽车当前位置点和预瞄点的连线与汽车运行方向延长线形成的夹角)跟踪问题,然后利用动态线性化技术将预瞄偏差角跟踪系统转化为等价的偏格式数据模型,进而设计出无模型自适应控制算法、伪梯度估计算法和伪梯度重置算法.该方案仅利用无人驾驶汽车运行过程中的I/O数据,不包含车辆的模型信息,对于不同的车辆具有很强的可移植性.本文方案已经应用于清华大学“睿龙”号无人驾驶汽车平台,北京市丰台区的实地测试以及江苏省常熟市高速环线的实验结果表明,MFAC对于无人驾驶汽车横向控制问题具有很明显的优势.“睿龙”号无人驾驶汽车应用MFAC预瞄偏差角跟踪方案参加了2015年第七届中国智能车未来挑战赛,其控制算法在比赛全程中没有出现任何问题.本文结构安排如下:第1节对无人驾驶汽车控制问题进行描述,第2节提出基于预瞄偏差角跟踪系统的无人驾驶汽车横向控制方案,第3节针对预瞄偏差角设计MFAC控制器,第4节给出在实际的无人驾驶汽车平台和实际道路上的实验结果,第5节得出结论.1无人驾驶控制问题描述1.1无人驾驶汽车平台简介清华大学“睿龙”号无人驾驶汽车平台以及汽车各个设备的分布情况如图1所示.该无人驾驶汽车平台由长安CS35自动挡汽车改装而成,保留原车中车载汽车状态传感器,并外接无人驾驶必需的定位定姿和环境感知传感器,包括GPS天线及接收机、摄像头、64线激光雷达、4线激光雷达以及毫米波雷达等,这些传感器相当于无人驾驶汽车的“眼睛”;汽车后备箱处放置主控计算机以实现数据采集、分析以及对汽车进行闭环控制等工作,相当于无人驾驶汽车的“大脑”;汽车的执行机构(油门、刹车和转向)通过CAN总线与主控计算机通信,执行机构相当于无人驾驶汽车的“四肢”,CAN总线和千兆以太网通讯相当于无人驾驶汽车的“神经连接”.其中,无人驾驶汽车的定位定姿与环境感知采用多传感器信息融合技术,例如利用差分GPS与惯性测量单元、里程计等多传感信息融合实现汽车位姿信息的获取[24];利用64线激光雷达(HDL)实现路缘的检测[25];利用黑白摄像头进行路面车道线图像信息的提取[6,26],利用彩色摄像头进行红绿灯以及交通标志的识别[27]等.定位定姿和环境感知设备的作用如表1所示.图1车载传感器分布图Fig.1Vehicle sensors distribution11期田涛涛等:基于无模型自适应控制的无人驾驶汽车横向控制方法1933表1定位定姿和环境感知设备的作用Table1Navigation and environmental perceptionequipments常用设备作用64线激光雷达感知周边环境信息4线激光雷达探测障碍物GPS天线定位以获取当前汽车位置信息黑白摄像头检测车道线彩色摄像头获取路口红绿灯、交通标志信息毫米波雷达检测汽车前方障碍物信息其他车载传感器检测汽车速度、汽车加速度等1.2无人驾驶汽车的控制结构无人驾驶控制问题的横向控制和纵向控制的控制结构如图2所示.图2控制系统结构图Fig.2Control system structure在无人驾驶汽车运行过程中,车载传感器不断将车辆状态信息数据传输给主控计算机,主控计算机计算出车辆的期望速度和期望位姿,传感器同时提供车辆当前速度以及当前位姿的信息.根据车辆的期望速度和当前速度可以计算出油门和刹车的控制量,即纵向控制;根据当前车辆的位姿和期望的位姿可以计算出方向盘转角的控制量,即横向控制.算出的控制量通过CAN总线驱动相应的执行机构,以便达到循迹跟踪的目的.纵向控制关注速度,而横向控制关注方向,在变化的车速、变化的负载以及变化的路况下控制汽车方向盘使得汽车跟踪上期望轨迹,横向控制直接决定了无人驾驶汽车循迹跟踪的性能.2基于预瞄偏差角跟踪的无人驾驶汽车横向控制方案2.1基本概念当汽车的运行速度较快时(例如在高速路上行驶时),司机会盯着前方较远的一个点;当汽车的速度较慢时(例如即将转弯时),则会盯着前面较近的一个点.无人驾驶参考这样的过程,引入了预瞄点和预瞄距离的概念[8],如图3所示.图3预瞄点与预瞄距离示意图Fig.3Preview point and preview distance profile预瞄点指的是在期望轨迹上、汽车前方某一距离的点,这段距离称为预瞄距离.需要注意的是预瞄距离是期望轨迹上距离汽车当前点最近的点与预瞄点的弧长距离,并不是预瞄点和汽车当前点连线的长度.预瞄距离与汽车运行速度之间的关系可以用经验公式(1)表示[8]l(v)=l min,v≤v minav+l min,v min<v≤v maxl max,v>v max(1)其中,l是预瞄距离(m),v是当前汽车的速度(m/s),lmin是最小预瞄距离(m),lmax是最大的预瞄距离(m),a是常数.这里存在最大的预瞄距离,是汽车设备感知能力具有限制的缘故,而存在最小的预瞄距离,则是为了在汽车速度为零时保证预瞄点在汽车前方位置处(汽车自身具有一定长度,而汽车当前点的选取在汽车中心处).在实际应用中,基于预瞄的控制策略多被采用.然而因为预瞄点和预瞄距离的参与,对无人驾驶汽车循迹跟踪问题进行数学建模的难度会增大,这是由于车辆模型和预瞄控制策略需要同时被考虑进建模过程中.无人驾驶汽车在驾驶过程中一些常用的概念如图4(a)所示,相关的符号含义见表2.图4横向控制问题示意图Fig.4Schematic diagram of lateral control problem1934自动化学报43卷表2常用概念符号意义Table2The meaning of common concepts and symbols图示符号意义O,E,N坐标原点、正东方、正北方α汽车航向角(汽车运行方向与正北方向夹角)β预瞄点航向角(预瞄点运动方向与正北方向夹角)l预瞄距离len当前点和预瞄点之间的距离LD汽车预瞄点与汽车运行方向延长线的距离AD预瞄点航向角与汽车航向角的差X汽车当前点与预瞄点运行方向延长线的距离θ当前点与预瞄点连线和汽车运行方向形成的角度连接预瞄点与当前位置点,假设汽车的运动方向与这条连线的夹角为θ,定义该夹角为预瞄偏差角(Preview-deviation-yaw)[28],规定当预瞄点在汽车运行方向右前侧时的预瞄偏差角为正.2.2预瞄偏差角跟踪方案由图4(a)可知,当LD→0且AD→0时,无人驾驶汽车便能跟踪上期望轨迹.由图4(a)中几何关系可知θ=arctan Xl−AD(2)当θ→0时,由式(2)可知汽车的运行情况如图4(b)所示,由于汽车朝向预瞄点的方向运动,所以有X(k+1)<X(k),所以序列{X(k)|X(k)≥0, k∈N+}的极限为0,即X(k)→0,又由于预瞄距离l(k)=0,故有arctan(X/l)→0,则由式(2)可知AD→0.另一方面,由图4(a)可知sinθ=LDlen(3)当θ→0时,由于两点距离len=0,所以有LD→0.通过分析可知,控制θ使之趋于0为无人驾驶汽车循迹跟踪问题提供了解决思路.为了便于工程实现,对θ跟踪系统的描述应采用离散化的表达形式.令θ(k)表示当前时刻k 的预瞄偏差角,u(k)表示当前时刻k的方向盘转角.由于无人驾驶汽车横向控制系统的非线性[7],所以θ(k)和u(k)之间的关系也是非线性的.对于离散时间非线性系统的一般描述,可以采用带外部输入的非线性自回归滑动平均(Nonlinear auto-regressive moving average with exogenous input, NARMAX)模型[29−31]来表示,其表达为θ(k+1)=f(θ(k),···,θ(k−kθ),u(k),···,u(k−k u))(4)其中,f(·):R kθ+k u+2→R是一个未知的非线性函数,kθ和k u分别是两个未知的的参数.下文称式(4)表示的系统为预瞄偏差角跟踪系统.对于无人驾驶横向控制问题,就是求取合适的u(k),使得θ(k)能够尽快、无超调地跟踪到0.预瞄偏差角的跟踪情况与汽车运行情况的对应关系如图5所示.图5预瞄偏差角跟踪情况与汽车运行情况图Fig.5Preview-deviation-yaw tracking condition and self-driving car operation condition由图5可以看出,对于预瞄偏差角跟踪系统的控制,控制算法的设计至关重要.3预瞄偏差角跟踪系统控制器设计3.1问题描述对于预瞄偏差角跟踪系统,利用数学模型设计横向控制器的思路会遇到很大的阻碍,这是因为汽车系统的数学模型难以建立,循迹跟踪问题也很难用数学表达式精确描述,即式(4)中的f(·)很难有11期田涛涛等:基于无模型自适应控制的无人驾驶汽车横向控制方法1935精确数学表达式.预瞄偏差角跟踪系统的阶数也是不确定的,即式(4)中的kθ和k u是不确定的.由此可知,预瞄偏差角跟踪系统是一个难建模、复杂的非线性系统,其固有的关于控制输入的非线性的特点使得这类系统的控制器设计变得非常困难,利用线性化方法将此类系统转化到线性系统的框架中进行研究是处理此类一般非线性系统的常用做法[18].本文采用无模型自适应控制算法(MFAC)作为无人驾驶汽车横向控制算法,参考文献[18],可以将预瞄偏差角系统(4)等价转化为基于I/O增量式的动态线性化数据模型,并基于此数据模型设计控制器.3.2MF AC动态线性化对于预瞄偏差角跟踪系统(4),定义U L(k)∈R L为一个滑动时间窗口[k−L+1,k]内所有控制输入信号组成的向量,如式(5).U L(k)=[u(k),···,u(k−L+1)]T(5)且满足当k≤0时,有U L(k)=0L,其中L为控制输入线性化长度参数;0L是维度为L的零向量.对于预瞄偏差角跟踪系统,很容易满足下面的假设:假设1.系统(4)输入输出可测可控.即对于一致有界的期望输出信号θ∗(k),存在一致有界可行的输入信号u(k),使得在该输入信号驱动下,系统的输出θ(k)趋于期望信号θ∗(k).假设2.f(·)关于第(kθ+2)个变量到第(kθ+L+1)个变量分别存在连续偏导数.假设3.系统(4)是广义Lipschitz的,即满足对任意的k1=k2,k1,k2≥0以及U L(k1)= U L(k2),有|θ(k1+1)−θ(k2+1)|≤b U L(k1)−U L(k2) (6)其中,θ(k i+1)=f(θ(k i),···,θ(k i−kθ),u(k i),···, u(k i−k u)),i=1,2,b>0是一个常数.记∆U L(k)=U L(k)−U L(k−1),可以给出如下引理.引理1[18].若非线性系统(4)满足假设1∼3,给定L,那么当 ∆U L(k) =0时,一定存在一个称为伪梯度(Pseudo gradient,PG)的时变参数向量φp,L(k)∈R L,使得系统(4)可以转化为如下数据模型∆θ(k+1)=φTp,L(k)∆U L(k)(7)且对于任意时刻k,φp,L(k)=[φ1(k),···,φL(k)]T 是有界的.这种动态线性化称为基于偏格式的动态线性化(Partial form dynamic linearization, PFDL).其中,φp,L(k)下标中的p即PFDL首字母,L表示向量的长度.根据引理1,无人驾驶汽车预瞄偏差角跟踪系统动态线性化模型可以表示为θ(k+1)=θ(k)+φTp,L(k)∆U L(k)(8) 3.3控制器设计考虑如下的控制输入准则函数J(u(k))=|θ∗(k+1)−θ(k+1)|2+λ|u(k)−u(k−1)|2(9)其中,第1项的引入是为了使得系统的输出与期望输出一致;第2项是为了使方向盘不产生突变,柔化执行器的处理过程,λ>0是一个权重因子.将式(8)代入准则函数(9)中,对u(k)求导,并令其等于零,得u(k)=u(k−1)+ρ1φ1(k)(θ∗(k+1)−θ(k))λ+|φ1(k)|2−φ1(k)Li=2ρiφi(k)∆u(k−i+1)λ+|φ1(k)|2(10)其中,φi(k)是时变参数向量φp,L(k)的第i个元素,步长因子ρi∈(0,1],i=1,2,···,L的引入是为了使控制算法设计具有更大的灵活性.由式(10)可知,为实现控制算法,需要知道PG 的值,然而由于预瞄偏差角跟踪系统的模型未知,且PG是时变参数,其精确的真实值很难获取,需要利用系统输入输出数据对其进行估计.考虑如下的PG估计准则函数J(φp,L(k))=|θ(k)−θ(k−1)−φTp,L(k)∆U L(k−1)|2+µ φp,L(k)−ˆφp,L(k−1) 2(11)其中,µ>0是权重因子.对式(11)关于φp,L(k)求极值,得到PG的估计算法为ˆφp,L(k)=ˆφp,L(k−1)+η∆U L(k−1)(θ(k)−θ(k−1))µ+ ∆U L(k−1)||2−η∆U L(k−1)(ˆφTp,L(k−1)∆U L(k−1))µ+ ∆U L(k−1)||2(12)其中,步长因子η∈(0,2]是为了使控制算法设计具有更大的灵活性;ˆφp,L(k)为未知PGφp,L(k)的估计值.1936自动化学报43卷为了使PG估计算法具有更强的跟踪时变参数的能力,并更好地适应无人驾驶实际情况,需要引入重置算法如下ˆφp,L(k)=ˆφp,L(1)(13)如果 ˆφp,L(k) ≤ε,或 ∆U L(k−1) ≤ε,或sign(ˆφ1(k))=sign(ˆφ1(1)),其中ˆφp,L(1)是ˆφp,L(k)的初始值,ε是一个小的正数.式(10)、式(12)和式(13)即为所设计的控制算法,文献[18]中有该控制算法稳定性的严格数学证明.4实验分析本文分别进行无人驾驶汽车的低速实验和高速实验.对于低速实验,文献[9]设定的纵向速度为8∼24km/h,为了进行对比分析,本文设定纵向速度为15km/h,实验场地以及轨迹如图6所示,本文先利用PID控制方法进行跟踪实验,然后利用第3.3节中设计的MFAC控制算法进行跟踪实验,并比较两种算法对预瞄偏差角跟踪系统的跟踪效果以及它们针对无人驾驶汽车循迹跟踪控制问题的控制效果,并与文献[8−9]的结果进行对比.图6低速实验场地图Fig.6Low speed experimental site对于高速实验,文献[6]设定的纵向速度为60∼80km/h,出于安全考虑,本文设定纵向速度为60km/h,在图7所示的常熟三环高架桥进行实验.本文对低速实验中的MFAC控制算法的参数不做任何修改,直接进行高速实验,分析控制效果,并与文献[6−7]的结果进行比较.4.1设备连接关系及调试软件框架无人驾驶汽车各个设备的连接关系以及调试软件框架如图8所示.外加的定位和感知传感器数据通过以太网传输给主控计算机,车速和踏板状态等原车自带传感器数据通过CAN总线传入主控计算机,本文从交换机接入外部调试计算机,编写控制算法调试软件,通过TCP/IP协议直接对无人驾驶汽车进行控制.图7高速公路实验场地图Fig.7Highway experimental site图8设备连接关系及调试软件框架图Fig.8Equipment connection anddebugging software framework整个系统的控制周期为100ms,调试计算机在一个控制周期内需要完成计算控制量、绘制图形以及保存数据等工作.外部调试计算机可以获取的数据如表3所示.调试计算机向主控计算机发送的内容如下:1)计算出的方向盘的转角;2)计算出的油门和刹车的开度(两者互斥,用同一变量表示,该变量为正表示油门输入,为负则表11期田涛涛等:基于无模型自适应控制的无人驾驶汽车横向控制方法1937示刹车输入).表3汽车状态数据符号及意义Table 3Symbols and meanings ofself-driving car s state data符号意义x ,y ,α汽车当前点的横坐标、纵坐标、航向角x ∗,y∗,β预瞄点的横坐标、纵坐标、航向角v 汽车当前的纵向速度a 汽车当前的纵向加速度w汽车当前点航向角的角速度当主控计算机(客户端)和调试计算机(服务器端)握手成功后即开始循环控制,客户端在每个控制周期内向服务器端传输汽车的状态信息,服务器端则根据相应的算法计算出控制量并传回给客户端,客户端通过CAN 总线将计算出的控制量作用于执行机构(油门、刹车和方向盘),进而实现闭环控制.4.2横向控制实验分析实验平台采用式(1)的预瞄距离表达式,参数分别是l min =4,l max =30,v min =0,v max =26,a =1.在低速实验中,对于无人驾驶汽车横向控制问题的分别利用增量式PID 方法和MFAC 方案进行对比实验,其中PID 控制器如式(14)所示:du (k )=K p (e (k )−e (k −1))+K i e (k )+K d (e (k )−2e (k −1)+e (k ))u (k )=u (k −1)+du (k )(14)用Z-N 法辅助以及大量的实验分析得到PID 的最佳参数为K p =500,K i =15,K d =30.对于MFAC 方案,式(10)、式(12)和式(13)中的控制输入线性化长度参数、步长因子、权重因子和PG 估计值的初值分别设定为L =3;ρ1=ρ2=ρ3=1;η=1;λ=22;µ=1;ˆφp,L(1)=[0.50.50.5]T ;ε设为10−5;系统延迟时间为3.7s.为了比较两种控制算法对于预瞄偏差角的跟踪效果,参考文献[9],定义均方根误差指标为RMSE(·)=1N N n =1|l n |2(15)其中,l n 是第n 个采样时刻的当前点与参考轨迹的距离,N 是总采样点数.两种算法的循迹跟踪效果、预瞄偏差角的跟踪效果和轨迹跟踪误差绝对值分别如图9∼11所示.两种控制算法的性能对比如表4所示.图9两种控制方法的跟踪效果对比图Fig.9Tracking effect comparison betweentwo control methods图10预瞄偏差角跟踪效果对比图Fig.10Preview-deviation-yaw trackingeffect comparison图11跟踪误差绝对值对比图Fig.11Absolute value of tracking error comparison1938自动化学报43卷表4两种控制算法性能对比列表Table4Theperformance oftwo control algorithms项目PID MFAC预瞄偏差角最大绝对值(rad)0.59450.4828预瞄偏差角均方根0.22590.1498跟踪误差的均方根0.52570.3320建立时间(s)85从图9∼11可以看出,PID方法在直线和小曲率转弯时的跟踪效果较好,但是PID方法的自适应性不强,很难同时适应直线和转弯的路况,对于曲率比较大的转弯(例如图中的直角转弯),不能很好地跟踪期望轨迹,最大的转弯误差为1.5m左右.另一方面,由于MFAC算法具有自适应性,在直线、小曲率转弯和大曲率转弯都能很好地适应系统的变化,故跟踪效果较好,最大的转弯误差为0.4m左右.另外,文献[8]中提出的控制算法在纵向速度为10km/h和20km/h时的建立时间分别是20s和22s;文献[9]中提出的控制算法在纵向速度为12km/h和16km/h时的跟踪误差均方根分别为0.774和0.716.本文提出的MFAC算法在低速实验中的建立时间为5s,在纵向速度为15km/h时的跟踪误差均方根为0.3320.对于高速实验,低速实验中MFAC控制算法参数不做任何修改,设定纵向速度为60km/h.跟踪效果如图12所示.图12高速跟踪轨迹图Fig.12Highway trajectory tracking参考文献[6],截取其中耗时100s的路段,本文截取路段为图7中AB段.该路段的跟踪误差绝对值以及预瞄偏差角的跟踪情况如图13所示.在AB段的跟踪误差的均方根为0.0738,最大跟踪误差绝对值为0.1824m;预瞄偏差角的均方根为0.0025,最大绝对值为0.0068rad.文献[7]所设计的控制器在纵向车速为19m/s(68.4km/h)时的跟踪误差均方根为0.0751.文献[6]中实验路段上车速由80km/h变为60km/h,又变回80km/h,整个路段的最大误差约为0.5m.图13高速公路轨迹跟踪性能Fig.13Performance of highway trajectory tracking通过图9∼13以及表4的实验数据分析,以及通过与相关文献的对比可以看出,不论低速实验还是高速公路的实验,针对无人驾驶汽车横向控制问题,本文提出的基于MFAC的预瞄偏差角跟踪方案都具有明显的优势.本文提出的控制算法利用C++语言编程实现,矩阵和向量全部转化成简单的四则运算进行处理,没有借助于任何专门的矩阵库或最优化库(文献[7]的算法实现需要借助用NPSOL软件包),对于不同无人驾驶汽车平台具有很强的可移植性.清华大学“睿龙”号无人驾驶汽车使用本文提出的预瞄偏差角跟踪方案,并利用MFAC算法做核心控制算法,参加第七届中国智能车未来挑战赛,如图14所示.该赛程全程约13.5公里,途经典型城郊、城区、快速道路、居民小区以及越野路面等真实交通环境.在道路直行、直角转弯、U形转弯(180◦转弯)等复杂路况的考验下,本文设计的算法都令人满意地完成了指定任务,没有出现任何故障.5结论本文针对无人驾驶汽车横向控制问题,将无人驾驶汽车循迹跟踪控制问题转化成预瞄偏差角跟踪问题,然后基于无人驾驶汽车横向控制系统的动态线性化数据模型,设计出无模型自适应控制算法、伪梯度估计算法和伪梯度重置算法,相比于传统的控制方案,该方案优点如下:。
●桐城派研究姚鼐家族弟子群考述汪孔丰(安庆师范大学文学院,安徽安庆246011)摘要:姚鼐不仅是桐城麻溪姚氏家族的标志性人物,也是桐城派的宗师。
他身边,聚集着一群从其问学的家族成员。
弟子依据辈行可分为四类:一是他的族叔,如姚兴泶、姚建等;二是他的族内兄弟,如姚羲轮、姚、姚斟元等;三是他的子、侄,如姚景衡、姚宪、姚原绂、姚通意等;四是他的孙子、侄孙及从侄孙,如姚莹、姚柬之、姚元之等。
尤以后面两类人居多。
姚氏一门群从的风雅景观,是桐城派演进史程中的重要现象,具有特殊的文学史和文化史意义。
关键词:麻溪姚氏;姚鼐;桐城派;弟子群中图分类号:K820.9收稿日期:2016-12-27项目基金:国家社科基金青年项目“文化家族视域下的桐城派研究”(13CZW051);年安徽省高校优秀青年人才支持计划重点项目(gxyqZD2016202);中国博士后科学基金第61批面上资助项目(2017M612048)。
作者简介:汪孔丰,男,安徽怀宁人,安庆师范大学文学院副教授,博士,安徽大学文学院博士后。
文献标识码:ADOI:10.13757/34-1329/c.2017.02.007文章编号:1003-4730(2017)02-0030-05姚鼐(1732-1815)不仅是桐城麻溪姚氏家族的标志性人物,也是桐城派的宗师。
他的身边聚集着一群服膺其法的门徒,刘声木《桐城文学渊源考》卷四对此有专门记载。
尤为显眼的是,姚莹、姚宪、姚景衡、姚濬昌、姚柬之、姚元之、姚兴泶、姚通意等八位姚姓作家名列其中,而他们竟然都是出自麻溪姚氏家族。
实际上,除姚莹之子姚濬昌外,其他七人都曾师事姚鼐,得其指教。
这表明姚鼐在家族内部声望甚高,影响甚广,吸引了姚家的一些成员相从问学。
由于刘声木所记较为简略,对这些姚家子弟诸多信息语焉不详或避而未谈,故我们了解这些姚氏子弟时不免会有一些疑惑:如姚鼐在家族中和他们有着什么样的辈分关系?姚鼐在学术、辞章等方面对这些人到底有多大的影响?除了这七人外,姚氏家族还有没有其他成员师从过姚鼐?这些问题倘能得到解决,将会更加有助于我们深刻体认姚氏家族文化的代际传承以及桐城派传衍的家族性特征等问题。
2019年第2期第32卷(总第188期)No.22019General No.188Vol.32海南师范大学学报(社会科学版)JOURNAL OF HAINAN NORMAL UNIVERSITY(Social Sciences)《伊万・伊利奇之死》:与原罪纠缠的现实批判包大为(浙江大学人文学院,浙江杭州310028)摘要:托尔斯泰的《伊万•伊利奇之死》描述了一个毕生追求布尔乔亚式的“体面”生活,却最终被生活所抛弃,在孤独和愤懑中死去的中产阶级市民的故事。
通过一个普通人死亡的这一事件,托尔斯泰描述了现代人的异化状态,揭露了商品拜物教对社会文化的普遍宰制,以及由此带来的自我异化的困境。
托尔斯泰通过对瓦夏和格拉西姆的正面描写,一方面体现了宗教和道德律对他的自我拷问,另一方面也隐喻地表达了他对理想社会的浪漫主义构想,这成为了将托尔斯泰主义引向未来社会图景的历史通道,但是却在他深重的原罪感之中又从现实批判退回到了单纯人本的关怀。
关键词:异化;死亡;他者;托尔斯泰主义;原罪中图分类号:1106.4文献标识码:A文章编号:1674-5310(2019)02-0085-07托尔斯泰的《伊万•伊利奇之死》是一篇在问世一个多世纪后仍然能够促使每个读者拷问自身存在的短篇小说,其内容不仅展示了个体构建死亡和存在之意义的过程,更揭示了在资本主义社会中自我异化的症候式的荒谬人生,主人公伊万•伊利奇不过是现代社会个体生存困境的缩影,异化的“体面生活”和文化成为一种颠覆生命的“普遍基础的特殊要素”,成为了“一个颠覆其种的属。
”①在作品中,行将就木的伊万•伊利奇所经历的愤怒和绝望逐渐将笼罩在异化症候外的现实合理性层层剥去,最终得到了对时代和社会总体意义的否定一“一切都错了……到底什么才是对的呢?”②而托尔斯泰主义的原罪语境的诠释则在这种批判和罪感的纠缠中呈现出一种矛盾,即在直面现实矛盾的同时诉诸于浪漫主义的自省。
正是这一矛盾使得托尔斯泰的存在主义洞见并不能走向陀思妥耶夫斯基,而是成为了19世纪浪漫主义文学在20世纪初的新形式。
收稿日期: 2018-08-31; 改回日期: 2019-05-14项目资助: 国家重点研发计划项目(2017YFC0601401)、博士后创新人才支持计划项目(BX201700216)、青岛海洋科学与技术国家实验室鳌山科技创新计划项目(2016ASKJ13、2017ASKJ02)、中国博士后科学基金项目(2017M622273)、国家自然科学基金项目(41802232、41702050、41325009)和青岛市博士后应用研究项目联合资助。
第一作者简介: 刘一鸣(1989–), 男, 博士, 从事海洋地质研究。
Email: michael_yatmingliu@通信作者: 李三忠(1968–), 男, 教授, 博士生导师, 从事海洋地质学及构造地质学研究。
Email: sanzhong@doi: 10.16539/j.ddgzyckx.2019.04.013卷(Volume)43, 期(Number)4, 总(SUM)171 页(Pages)824~838, 2019, 8(August, 2019)大 地 构 造 与 成 矿 学Geotectonica et Metallogenia青藏高原班公湖‒怒江缝合带及周缘燕山期微地块聚合与增生造山过程刘一鸣1, 2, 李三忠1, 2*, 于胜尧1, 2, 曹现志1, 2, 周 洁1, 2, 李 阳1, 2, 王誉桦1, 2, 徐林山3, 郭润华1, 2, 周在征1, 2(1.海底科学与探测技术教育部重点实验室, 中国海洋大学 海洋高等研究院和海洋地球科学学院, 山东 青岛 266100; 2.青岛海洋科学与技术国家实验室 海洋矿产资源评价与探测技术功能实验室, 山东 青岛 266237; 3.北京市地质工程设计研究院, 北京 100050)摘 要: 班公湖‒怒江洋多岛弧盆体系的俯冲闭合过程对于研究青藏高原早期形成与演化具有重要意义。
本文系统总结了羌南‒保山地块与拉萨地块燕山期的岩浆岩、沉积序列以及变质变形特征, 详细探讨了其与班公湖‒怒江洋俯冲闭合过程的联系。